基于虛擬現(xiàn)實(shí)和增強(qiáng)現(xiàn)實(shí)的虛擬仿真實(shí)訓(xùn)室平臺(tái)*
2022-08-09 06:16:12丁亞軍應(yīng)治國(guó)陳一民
計(jì)算機(jī)時(shí)代 2022年8期
丁亞軍,應(yīng)治國(guó),陳一民
(1.上海長(zhǎng)潤(rùn)信息技術(shù)有限公司,上海 200050;2.上海建橋?qū)W院信息技術(shù)學(xué)院)
0 引言
虛擬仿真實(shí)訓(xùn)室平臺(tái)的建設(shè)是“未來(lái)校園”開展線上線下相融合的混合實(shí)訓(xùn)教學(xué)重要的組成部分,也是人工智能環(huán)境下,教師人技協(xié)作有效開展實(shí)訓(xùn)教學(xué)的重要載體。虛擬現(xiàn)實(shí)(Virtual Reality,簡(jiǎn)稱VR)是一種將計(jì)算機(jī)圖形技術(shù)與相關(guān)設(shè)備相結(jié)合,可為人們創(chuàng)造一個(gè)具有沉浸感、互動(dòng)性和想象力的良好虛擬環(huán)境的仿真技術(shù)。增強(qiáng)現(xiàn)實(shí)(Augmented Reality,簡(jiǎn)稱AR)是將計(jì)算機(jī)建立的虛擬物體信息疊加在真實(shí)的現(xiàn)實(shí)場(chǎng)景中,通過(guò)三維注冊(cè)技術(shù)來(lái)實(shí)現(xiàn)對(duì)真實(shí)場(chǎng)景的增強(qiáng)。近年來(lái),VR、AR 已廣泛應(yīng)用于國(guó)內(nèi)外教育與培訓(xùn)領(lǐng)域,包括設(shè)計(jì)方案評(píng)估、虛擬維修培訓(xùn)等。VR、AR 技術(shù)在樓宇智能化設(shè)備安裝與運(yùn)行專業(yè)課程(樓控系統(tǒng)的安裝與維護(hù)課程,綜合布線課程)技能實(shí)訓(xùn)方面具有獨(dú)特的優(yōu)勢(shì),可創(chuàng)造一個(gè)高逼真度的訓(xùn)練環(huán)境,使受訓(xùn)人員沉浸在良好交互的場(chǎng)景中,為受訓(xùn)人員提供身臨其境般的三維空間虛擬感受。
本虛擬仿真實(shí)訓(xùn)室平臺(tái)基于數(shù)據(jù)驅(qū)動(dòng)理念,聚焦樓宇智能化設(shè)備安裝與運(yùn)行專業(yè)課程技能實(shí)訓(xùn)功能,采集和積累學(xué)生實(shí)訓(xùn)過(guò)程數(shù)據(jù),通過(guò)分析模型,準(zhǔn)確判斷學(xué)生的學(xué)習(xí)情況,適時(shí)特性化的推送實(shí)訓(xùn)資源,從而縮短實(shí)訓(xùn)學(xué)習(xí)時(shí)長(zhǎng),提升學(xué)生的動(dòng)手能力。
本文將VR、AR 技術(shù)應(yīng)用于樓宇智能化設(shè)備安裝與運(yùn)行專業(yè)課程技能實(shí)訓(xùn)環(huán)節(jié),應(yīng)用了上海長(zhǎng)潤(rùn)信息技術(shù)有限公司技術(shù)團(tuán)隊(duì)自主研發(fā)的長(zhǎng)潤(rùn)虛擬仿真實(shí)訓(xùn)管理和共享平臺(tái)、長(zhǎng)潤(rùn)虛擬化仿真實(shí)訓(xùn)軟件V1.0.0以及面向職教的智慧教學(xué)云計(jì)算平臺(tái)等技術(shù)研究成果,搭建了一種樓宇智能化設(shè)備安裝與運(yùn)行專業(yè)課程技能平臺(tái),該平臺(tái)應(yīng)用3ds Max 和Unity3D 軟件創(chuàng)建高逼真度的虛擬場(chǎng)景,采用有限狀態(tài)機(jī)模型作為模擬實(shí)訓(xùn)過(guò)程的核心算法,采用Java 及C#實(shí)現(xiàn)程序編制,圖形界面采用UGUI 插件進(jìn)行設(shè)計(jì),仿真中引入了粒子系統(tǒng)。該平臺(tái)能夠直觀展現(xiàn)樓宇智能化設(shè)備安裝與運(yùn)行課程中各復(fù)雜環(huán)境與運(yùn)行仿真場(chǎng)景,為學(xué)生提供一種高逼真度的訓(xùn)練環(huán)境,對(duì)提升學(xué)生的實(shí)戰(zhàn)能力具有重要的意義和價(jià)值。
1 平臺(tái)架構(gòu)與功能
1.1 總體架構(gòu)設(shè)計(jì)
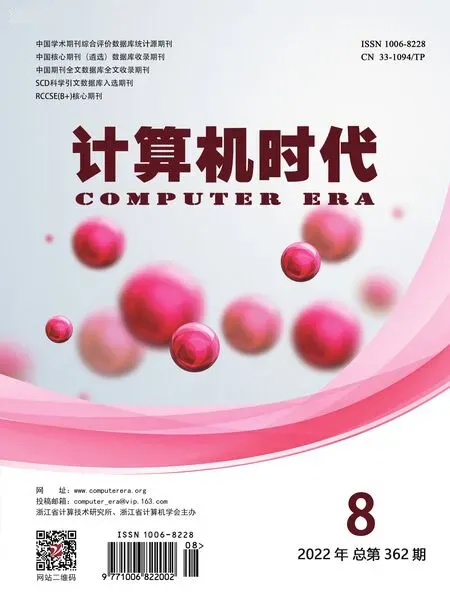
綜合考慮樓宇智能化設(shè)備安裝與運(yùn)行專業(yè)課程技能實(shí)訓(xùn)的需求,結(jié)合體系架構(gòu)理論,設(shè)計(jì)了一種混合式架構(gòu)(基于瀏覽器/服務(wù)器(B/S)模式和客戶端/服務(wù)器(C/S)模式),如圖1 所示。主要由兩大部分內(nèi)容構(gòu)成,即“管理和共享平臺(tái)”及“相關(guān)技能虛擬仿真實(shí)訓(xùn)子系統(tǒng)”。以一幢智能化樓宇—“未來(lái)大廈”為載體,融入兩門課程(樓宇智能化設(shè)備安裝與運(yùn)行課程、以及綜合布線課程相關(guān)技能點(diǎn)實(shí)訓(xùn)模塊)的虛擬化仿真實(shí)訓(xùn)項(xiàng)目和與之相配套的基于典型應(yīng)用場(chǎng)景的系列技能實(shí)訓(xùn)功能,以大廈實(shí)際應(yīng)用進(jìn)行樓層內(nèi)的布點(diǎn),將實(shí)訓(xùn)項(xiàng)目有效分類、整合,構(gòu)建以職場(chǎng)工作為原型的實(shí)訓(xùn)體驗(yàn)環(huán)境。學(xué)生通過(guò)虛擬仿真實(shí)訓(xùn)室的項(xiàng)目實(shí)訓(xùn),既能讓學(xué)生開展單項(xiàng)技能實(shí)訓(xùn),又能讓學(xué)生多角色崗位聯(lián)動(dòng)實(shí)訓(xùn),從而掌握“未來(lái)大廈”的整體管控。
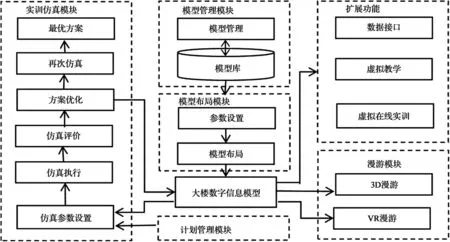
圖1 實(shí)訓(xùn)平臺(tái)的總體架構(gòu)圖
由于傳統(tǒng)方法無(wú)法對(duì)多個(gè)虛擬實(shí)訓(xùn)過(guò)程進(jìn)行融合和優(yōu)化,同時(shí)也難以實(shí)現(xiàn)過(guò)程、計(jì)劃、實(shí)施、運(yùn)維一體化的實(shí)訓(xùn)目標(biāo)。設(shè)計(jì)并開發(fā)基于建筑信息模型和虛擬現(xiàn)實(shí)技術(shù)(VR)、增強(qiáng)現(xiàn)實(shí)(AR)的實(shí)訓(xùn)空間可以很好地解決這一問(wèn)題。開發(fā)基于VR、AR 技術(shù)的實(shí)訓(xùn)平臺(tái),在實(shí)訓(xùn)環(huán)境的設(shè)計(jì)階段,利用該實(shí)訓(xùn)環(huán)境協(xié)同設(shè)計(jì),建立實(shí)訓(xùn)環(huán)境的數(shù)字化模型。在實(shí)訓(xùn)空間模型的基礎(chǔ)上,設(shè)置設(shè)備參數(shù),對(duì)設(shè)施設(shè)備運(yùn)行過(guò)程進(jìn)行仿真,模擬實(shí)訓(xùn)空間(整個(gè)大樓所含的主要及關(guān)鍵設(shè)備)運(yùn)行過(guò)程,再對(duì)整個(gè)實(shí)訓(xùn)的規(guī)劃布局、設(shè)備配置等進(jìn)行評(píng)價(jià)和優(yōu)化。
1.2 平臺(tái)硬件架構(gòu)
參考真實(shí)情況下樓控系統(tǒng)的安裝與維護(hù)課程以及綜合布線課程相關(guān)實(shí)訓(xùn)環(huán)節(jié),我們?cè)O(shè)計(jì)了該實(shí)訓(xùn)平臺(tái),其硬件架構(gòu)如圖2 所示,包括三維場(chǎng)景可視化、實(shí)訓(xùn)演練、人機(jī)交互仿真、在線考核評(píng)估等。
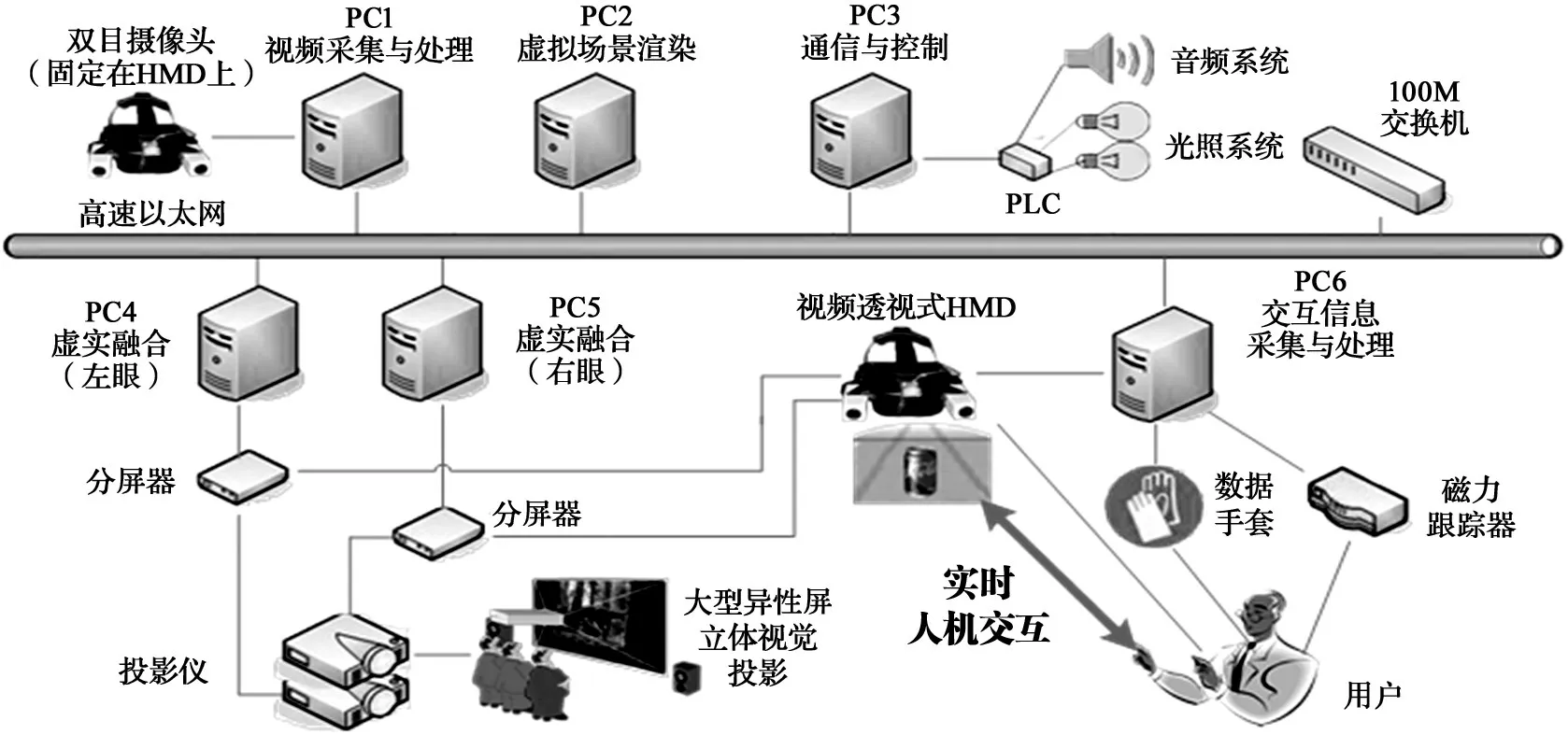
圖2 平臺(tái)的硬件架構(gòu)
通過(guò)數(shù)據(jù)手套和磁力跟蹤器等設(shè)備可實(shí)現(xiàn)對(duì)操作者動(dòng)作的捕獲,由PC6 完成對(duì)這些交互操作采集與處理;PC2 接收PC6 的輸出并據(jù)此完成虛擬場(chǎng)景的繪制、注冊(cè)和渲染等;PC2 輸出的虛擬場(chǎng)景同步發(fā)送至PC4 和PC5;PC1 使用雙目攝像頭和視頻采集卡對(duì)真實(shí)場(chǎng)景進(jìn)行采集和處理,左右眼輸出視頻分別發(fā)送至PC4 和PC5;PC4 和PC5 完成虛擬及真實(shí)場(chǎng)景的融合,并通過(guò)分屏器分別輸出至頭盔顯示器和投影儀,發(fā)送到頭盔顯示器的融合場(chǎng)景視頻供操作者使用,而發(fā)送至投影儀的融合場(chǎng)景視頻,供觀察者使用,觀察者可以看到與操作者相同的畫面。所有計(jì)算機(jī)通過(guò)高速以太網(wǎng)連接,在PC3 的管理下進(jìn)行相互間的通訊,PC3是系統(tǒng)的通信和控制中心,另外,PC3還要完成音頻控制、光照控制、設(shè)備狀態(tài)監(jiān)控及控制和管理等任務(wù)。
另外,通過(guò)構(gòu)建真實(shí)的樓宇設(shè)施設(shè)備模型和交互環(huán)境,基于改進(jìn)自適應(yīng)跟蹤算法的增強(qiáng)現(xiàn)實(shí)三維注冊(cè),可在移動(dòng)端將AR 人機(jī)交互、三維全景漫游、視頻多媒體元素相關(guān)結(jié)合,實(shí)現(xiàn)對(duì)虛擬裝備移動(dòng)可視化與交互,讓學(xué)生通過(guò)人機(jī)交互可視化系統(tǒng)不受時(shí)間、地域的限制快速學(xué)習(xí)新的技術(shù)和設(shè)備知識(shí),達(dá)到快速認(rèn)知了解樓宇設(shè)施設(shè)備內(nèi)部結(jié)構(gòu)以及工作原理的目的。
1.3 核心業(yè)務(wù)流程
“虛擬仿真實(shí)訓(xùn)室平臺(tái)”不僅提供虛擬實(shí)訓(xùn)服務(wù)功能,而且可以采集實(shí)訓(xùn)過(guò)程數(shù)據(jù),并能對(duì)其進(jìn)行統(tǒng)計(jì)分析,展示給老師和學(xué)生。其核心業(yè)務(wù)流程如圖3所示,含實(shí)訓(xùn)準(zhǔn)備、實(shí)訓(xùn)演練及實(shí)訓(xùn)統(tǒng)計(jì)三大部分,可使學(xué)生身臨其境般的學(xué)習(xí)、訓(xùn)練,掌握實(shí)際技能。讓學(xué)生全面了解和認(rèn)知智能樓宇相關(guān)的各方面知識(shí),并通過(guò)虛擬化實(shí)訓(xùn)的方式幫助學(xué)生擴(kuò)展書本上無(wú)法獲取的知識(shí)及經(jīng)驗(yàn),同時(shí)記錄學(xué)生的學(xué)習(xí)與實(shí)訓(xùn)過(guò)程,并對(duì)其學(xué)習(xí)經(jīng)歷進(jìn)行研判。
圖3 虛擬仿真實(shí)訓(xùn)室平臺(tái)-業(yè)務(wù)流程圖
1.4 核心業(yè)務(wù)功能
“虛擬仿真實(shí)訓(xùn)室平臺(tái)”應(yīng)用軟件功能主要由兩大部分構(gòu)成:①管理和共享平臺(tái);②相關(guān)技能虛擬仿真實(shí)訓(xùn)子系統(tǒng)”(含兩門課程相關(guān)技能點(diǎn)實(shí)訓(xùn)模塊,有拓展空間)。
在實(shí)訓(xùn)教學(xué)開始前,教師可以通過(guò)管理平臺(tái)設(shè)置實(shí)訓(xùn)項(xiàng)目,提出要求及關(guān)鍵參數(shù),并準(zhǔn)備相關(guān)的理論或技能知識(shí)資源供學(xué)生學(xué)習(xí)。實(shí)訓(xùn)項(xiàng)目相關(guān)信息可以從外部系統(tǒng)獲取數(shù)據(jù),如實(shí)訓(xùn)課程信息、實(shí)訓(xùn)要求、實(shí)訓(xùn)資源等。學(xué)生可以在各虛擬仿真實(shí)訓(xùn)子系統(tǒng)中進(jìn)行實(shí)訓(xùn)操作。在實(shí)訓(xùn)前先進(jìn)行理論知識(shí)、技能要點(diǎn)、實(shí)訓(xùn)要求的學(xué)習(xí),然后正式進(jìn)入實(shí)訓(xùn)。在實(shí)訓(xùn)過(guò)程中,平臺(tái)會(huì)自動(dòng)進(jìn)行各種關(guān)鍵性數(shù)據(jù)的采集,如實(shí)訓(xùn)動(dòng)作、實(shí)訓(xùn)步驟、時(shí)間等等。在實(shí)訓(xùn)演練結(jié)束后,通過(guò)評(píng)價(jià)模型對(duì)各類實(shí)訓(xùn)過(guò)程數(shù)據(jù)進(jìn)行統(tǒng)計(jì)分析,將統(tǒng)計(jì)分析的結(jié)果、評(píng)價(jià)建議以及根據(jù)實(shí)訓(xùn)情況推薦的學(xué)習(xí)資源展示給學(xué)生。教師在平臺(tái)中可以查看學(xué)生歷次實(shí)訓(xùn)的操作記錄和統(tǒng)計(jì)分析的信息、維護(hù)實(shí)訓(xùn)成績(jī),以及查看各類統(tǒng)計(jì)圖表,并根據(jù)實(shí)訓(xùn)情況及時(shí)調(diào)整優(yōu)化實(shí)訓(xùn)教學(xué)內(nèi)容。最終也可將采集和分析的數(shù)據(jù)傳輸?shù)酵獠肯到y(tǒng)。
2 關(guān)鍵方法
2.1 三維場(chǎng)景可視化及性能優(yōu)化
三維場(chǎng)景可視化主要實(shí)現(xiàn)高真實(shí)度的樓宇智能化設(shè)備安裝與運(yùn)行課程中所涉及的場(chǎng)景、各種設(shè)備的動(dòng)態(tài)模擬仿真與實(shí)時(shí)顯示,是確保仿真實(shí)訓(xùn)質(zhì)量的重要前提。樓宇智能化設(shè)備安裝與運(yùn)行課程中所涉及的大樓以及設(shè)備等復(fù)雜模型,本文以現(xiàn)實(shí)中設(shè)備結(jié)構(gòu)模型為依據(jù),在三維工程建模軟件中進(jìn)行相關(guān)設(shè)備及裝備的制作,并采用二維平面設(shè)計(jì)軟件設(shè)計(jì)與模型外表相符的紋理貼圖,通過(guò)三維模型渲染軟件對(duì)模型進(jìn)行渲染,包括紋理貼圖、材質(zhì)與燈光。以智能化樓宇為例,其構(gòu)建過(guò)程根據(jù)CAD圖紙,按照實(shí)際和虛擬1:1的尺寸比例搭建框架模型,并結(jié)合現(xiàn)場(chǎng)照片,利用3ds Max軟件渲染出最終三維數(shù)字化模型。當(dāng)三維模型立面很多,達(dá)到百萬(wàn)級(jí),而且要展示多個(gè)建筑物時(shí),對(duì)硬件的內(nèi)存消耗很大,必須做優(yōu)化,一方面在3ds MAX中剔除多邊形的背面,只顯示其必要面,減少模型面數(shù),使系統(tǒng)運(yùn)行順暢,使用材質(zhì)優(yōu)化工具對(duì)模型進(jìn)行材質(zhì)優(yōu)化,優(yōu)化所有模型多維或子對(duì)象材質(zhì),并清除游離點(diǎn)和清除空物體樣條線,減少模型內(nèi)存,增強(qiáng)模型的穩(wěn)定性;另一方面可在Unity3D 中把模型做成預(yù)制體,只在程序執(zhí)行的必要時(shí)候進(jìn)行實(shí)例化,其余時(shí)間處于銷毀狀態(tài)。
Unity3D 編譯時(shí)選擇合適的分辨率,不是越高越好,根據(jù)實(shí)際的運(yùn)行效果,選擇適當(dāng)?shù)姆直媛剩梢越导?jí)程序運(yùn)行的存儲(chǔ)和內(nèi)存空間,提高運(yùn)行速度,而不會(huì)降低學(xué)生的體驗(yàn)效果。將渲染過(guò)的模型導(dǎo)入虛擬仿真引擎中進(jìn)行處理,結(jié)合地形地貌系統(tǒng)與天空盒模塊的構(gòu)建,并采用LOD 分級(jí)顯示技術(shù)與遮擋剔除技術(shù)來(lái)優(yōu)化場(chǎng)景資源,最終成功搭建高逼真度的三維虛擬場(chǎng)景,圖4所示為其中一個(gè)三維場(chǎng)景。

圖4 智能化樓宇仿真模型
2.2 WebGL渲染
WebGL是一種三維繪圖協(xié)議,為網(wǎng)頁(yè)添加OpenGL 特性支持,從而實(shí)現(xiàn)3D 圖形渲染。相比較WebPlayer 使用需要先安裝瀏覽器插件,WebGL 使用時(shí),無(wú)需額外的插件支撐,便可以實(shí)現(xiàn)Web 交互式三維渲染,提高了軟件使用便捷性。在Unity中,WebGL通過(guò)il2cpp.exe 將.NET IL 中間語(yǔ)言編譯成C# ++源碼,然后通過(guò)各個(gè)平臺(tái)的C++編譯器進(jìn)行編譯,達(dá)到跨平臺(tái)訪問(wèn)目的。對(duì)于C++源碼,Unity支持兩種轉(zhuǎn)化方式:asm.js 和WebAssembly(wasm),其中asm.js 是文本格式,WebAssembly 是二進(jìn)制格式。考慮到二進(jìn)制運(yùn)行速度更快,體積更小,我們采用wasm方式進(jìn)行轉(zhuǎn)化。WebAssembly 是基于堆棧虛擬機(jī)的二進(jìn)制格式,通過(guò)編譯程序源碼,可以將程序部署在Web端。以Windows平臺(tái)為例,利用底層虛擬機(jī)LLVM Emscripten 編譯器將C++編譯成.wasm 文件。由于wasm 不能直接被瀏覽器識(shí)別,需要通過(guò)JavaScript 接口進(jìn)行頁(yè)面加載,從而實(shí)現(xiàn)3D圖形網(wǎng)頁(yè)渲染,其原理如圖5所示。
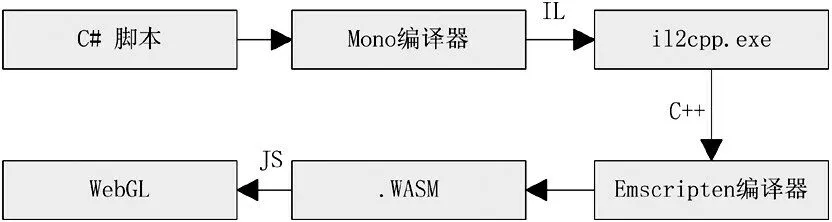
圖5 WebGL原理
2.3 人機(jī)交互仿真
良好的人機(jī)交互功能能夠提升訓(xùn)練質(zhì)量、改善實(shí)訓(xùn)效果。我們選擇HTC Vive 作為交互設(shè)備,雙基站追蹤頭盔和手柄位置和角度信息,實(shí)時(shí)跟新場(chǎng)景和交互動(dòng)作,實(shí)現(xiàn)沉浸式漫游和交互體驗(yàn)。
場(chǎng)景中導(dǎo)入SteamVR Plugin,Hierarchy 窗口中添加將CameraRig 和SteamVR。手柄和基站定位器鏈接SteamVR 定位系統(tǒng),通過(guò)頭盔和手柄中傳感器,實(shí)現(xiàn)定位功能。頭盔和手柄由Camera Rig 控制。刪除原來(lái)的Camera,運(yùn)動(dòng)手柄連接成功后,虛擬場(chǎng)景中會(huì)創(chuàng)建虛擬手柄。選擇視圖中Camera(eye),攝像機(jī)將精確地追蹤到頭盔,然后創(chuàng)建腳本并添加到控制器上。在Scripts 文件夾下創(chuàng)建C#語(yǔ)言腳本,刪除Start(),編寫方法程序代碼放入U(xiǎn)pdate()內(nèi),對(duì)手柄控制器進(jìn)行一個(gè)引用,作為被跟蹤對(duì)象。通過(guò)SteamVR_Controll-er.Device 訪問(wèn)到手柄控制器,通過(guò)手柄控制器input值追蹤對(duì)象并返回這個(gè)input 值。頭盔和手柄都是被追蹤對(duì)象,在現(xiàn)實(shí)中移動(dòng)和旋轉(zhuǎn)頭盔與手柄都能被系統(tǒng)追蹤到。在Update()中編寫方法程序,Tracked_Obj 會(huì)被賦值SteamVR_Tracked Object 對(duì)象,通過(guò)訪問(wèn)手柄的輸入信號(hào)并傳輸?shù)娇刂婆_(tái),實(shí)現(xiàn)程序表達(dá)的動(dòng)作。
選擇瞬移的方式來(lái)實(shí)現(xiàn)虛擬場(chǎng)景中的移動(dòng)漫游功能,借助運(yùn)動(dòng)手柄向目的地面發(fā)射激光,攝像機(jī)瞬間移動(dòng)到激光定位的位置,達(dá)到虛擬場(chǎng)景中的視野移動(dòng)。首先利用預(yù)配置的ViveNavMesh 在Unity3d 中烘焙一個(gè)導(dǎo)航網(wǎng)格。添加ParabolicPointer 組件后,生成指示網(wǎng)格從Vive Nav Mesh 中采樣獲得指示數(shù)據(jù)。給SteamVR Camera 添加Vive Teleporter 組件,組件通過(guò)控制傳送機(jī)制從Parbolic Pointer中獲取指示數(shù)據(jù),確定傳送的位置,移動(dòng)后實(shí)時(shí)渲染的新場(chǎng)景平穩(wěn)地切入轉(zhuǎn)換減少了眩暈感。
本系統(tǒng)的交互點(diǎn)數(shù)量龐大,有如按鈕、照明燈、調(diào)速旋鈕等,虛擬交互點(diǎn)保持與現(xiàn)實(shí)一致的邏輯動(dòng)作過(guò)程。先將交互點(diǎn)進(jìn)行分類處理,然后用C#語(yǔ)言編寫程序控制交互點(diǎn)動(dòng)作。另外采用界面開發(fā)插件UGUI完成交互界面設(shè)計(jì),根據(jù)需求,設(shè)計(jì)人機(jī)交互界面,包括登錄界面、功能模塊界面、仿真操作界面、設(shè)置界面、在線學(xué)習(xí)與考核界面等。
3 應(yīng)用結(jié)果
我們所開發(fā)的實(shí)訓(xùn)項(xiàng)目支持多種主流平臺(tái)發(fā)布,包括PC、手機(jī)及平板等,訓(xùn)練人員可通過(guò)本地電腦、手機(jī)或平板進(jìn)行培訓(xùn)考核,極大增強(qiáng)了仿真培訓(xùn)的便捷性。本平臺(tái)包含兩門課程實(shí)訓(xùn)內(nèi)容,主要通過(guò)“知識(shí)認(rèn)知”和“技能實(shí)訓(xùn)”兩種形式呈現(xiàn)。
根據(jù)實(shí)訓(xùn)課程相關(guān)知識(shí)點(diǎn),組織學(xué)習(xí)資源,引導(dǎo)學(xué)生在虛擬仿真實(shí)訓(xùn)場(chǎng)景中進(jìn)行學(xué)習(xí),通過(guò)對(duì)真實(shí)工作場(chǎng)景的高度還原,引導(dǎo)學(xué)生熟悉實(shí)際工作崗位上所要接觸到的知識(shí)點(diǎn)。虛擬仿真技術(shù)與傳統(tǒng)文字、圖片或視頻技術(shù)相比較,可以從事物的外在架構(gòu)逐步透視到內(nèi)在構(gòu)成,結(jié)合預(yù)先設(shè)置好的學(xué)習(xí)路線、平臺(tái)可以引導(dǎo)學(xué)生依照專業(yè)崗位職責(zé)設(shè)置開展學(xué)習(xí)活動(dòng),從而使得學(xué)生形成整體上的認(rèn)知,如圖6所示。
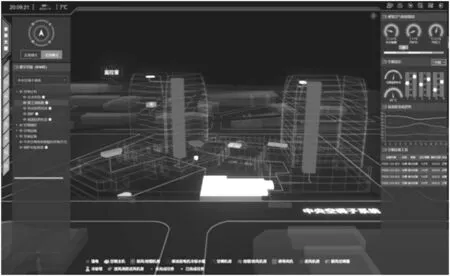
圖6 樓宇自動(dòng)化虛擬仿真認(rèn)知實(shí)訓(xùn)
根據(jù)真實(shí)工作崗位要求,我們?cè)O(shè)計(jì)了相關(guān)技能實(shí)訓(xùn)及考核環(huán)節(jié),引導(dǎo)學(xué)生在虛擬仿真實(shí)訓(xùn)場(chǎng)景中進(jìn)行實(shí)訓(xùn)或考核。傳統(tǒng)的虛擬仿真實(shí)訓(xùn)場(chǎng)景一旦開發(fā)完畢即固化且難以調(diào)整,考慮到現(xiàn)代樓宇自動(dòng)化管理技術(shù)的發(fā)展,實(shí)際工作場(chǎng)景隨著管理需求的變更或設(shè)備技術(shù)的提升,相關(guān)技能學(xué)習(xí)或?qū)嵱?xùn)要求會(huì)隨之有所改變,因此提供了一套虛擬仿真實(shí)訓(xùn)場(chǎng)景參數(shù)設(shè)置接口,依照相關(guān)接口可以定義實(shí)訓(xùn)場(chǎng)景的各類參數(shù),如需要顯示的設(shè)備名稱、描述;互動(dòng)操作的取值范圍,限制條件等,通過(guò)這一模式,可以最大限度利用“三維場(chǎng)景可視化”環(huán)節(jié)的工作成果,同時(shí)亦可為未來(lái)場(chǎng)景擴(kuò)展做好準(zhǔn)備。
“知識(shí)認(rèn)知”和“技能實(shí)訓(xùn)”時(shí),系統(tǒng)將采集其過(guò)程數(shù)據(jù),并根據(jù)一定的規(guī)則加以評(píng)判(如,是否在指定時(shí)間內(nèi)完成,是否掌握該崗位必要的技能點(diǎn)等等),對(duì)學(xué)生技能掌握情況有一個(gè)定量的分析供師生參考,也為個(gè)性化教學(xué)提供參考數(shù)據(jù),這是本平臺(tái)的一大創(chuàng)新點(diǎn),如圖7所示。

圖7 樓宇自動(dòng)化虛擬仿真實(shí)訓(xùn)評(píng)估
4 結(jié)束語(yǔ)
基于虛擬現(xiàn)實(shí)與仿真技術(shù),結(jié)合Unity3D 虛擬仿真引擎,對(duì)樓控系統(tǒng)的運(yùn)行與維護(hù)課程以及綜合布線課程實(shí)訓(xùn)的關(guān)鍵技術(shù)進(jìn)行了探索性研究,開發(fā)了一種高真實(shí)度的行為仿真模型,成功搭建了一種虛擬仿真實(shí)訓(xùn)室平臺(tái)。該平臺(tái)能夠直觀展現(xiàn)樓宇智能化設(shè)備安裝與運(yùn)行課程以及綜合布線課程中各種復(fù)雜環(huán)境與運(yùn)行仿真場(chǎng)景,為學(xué)生提供一種高度逼真的訓(xùn)練環(huán)境,支持注冊(cè)登錄、虛擬漫游、實(shí)訓(xùn)演練、在線考核評(píng)估等功能,可發(fā)布到電腦、手機(jī)或平板,可以隨機(jī)隨時(shí)進(jìn)行考核培訓(xùn),增強(qiáng)了培訓(xùn)的便捷性。該研究成果具有重要意義和實(shí)用價(jià)值。
猜你喜歡
故事作文·高年級(jí)(2023年10期)2023-10-23 11:21:18
中國(guó)特種設(shè)備安全(2022年6期)2022-09-20 02:52:28
裝備制造技術(shù)(2020年12期)2020-05-22 09:25:38
電子制作(2018年11期)2018-08-04 03:26:08
中國(guó)公路(2017年19期)2018-01-23 03:06:33
學(xué)苑創(chuàng)造·A版(2017年6期)2017-06-23 14:10:46
電子制作(2017年8期)2017-06-05 09:36:15
工業(yè)設(shè)計(jì)(2016年12期)2016-04-16 02:52:00
信息記錄材料(2016年4期)2016-03-11 15:22:54
Coco薇(2015年11期)2015-11-09 13:03:51