基于粒子濾波的三維轉彎目標跟蹤方法
2022-08-11 01:31:20馮亞強張公平
航空兵器 2022年3期
關鍵詞:模型
馮亞強,宋 龍,張公平,2
(1. 中國空空導彈研究院,河南 洛陽 471009; 2. 航空制導武器航空科技重點實驗室, 河南 洛陽 471009)
0 引 言
隨著空中目標機動和突防能力的顯著提升,出現了一系列復雜的機動形式,如蛇形機動、水平轉彎等。為實現對機動目標的有效攔截,需要得到目標的準確運動信息,而導引頭上的探測器往往只能提供有限的測量信息,且伴隨著大量噪聲,因此,機動目標跟蹤的關鍵在于如何從觀測信息中有效地估計出目標的狀態信息。
機動目標模型的建立是機動目標跟蹤的基礎,一個好的模型可以有效提升目標跟蹤的精度。目前有許多關于目標模型的研究成果,包括CV模型、CA模型、Singer模型、CS模型、jerk模型等。除了建立與機動目標運動情況盡可能吻合的模型外,選擇與目標模型匹配的跟蹤算法也是目標跟蹤的關鍵。然而,目前提出的經典模型都是基于線性系統的模型,實際工程中往往會遇到一些非線性的機動目標跟蹤問題,如果用現有的線性模型和跟蹤算法進行估計,由于模型不匹配會導致濾波精度很差甚至發散。因此,針對目標做復雜機動時的非線性系統估計問題,建立準確的模型并選擇與之匹配的濾波算法是機動目標跟蹤的關鍵。
基于此,本文針對做HGB機動的目標提出了一種三維轉彎模型,并建立了導彈在攔截過程中可信的動力學模型。然后,采用PF,EKF,UKF對基于三維轉彎模型的系統進行估計,仿真表明,PF的估計性能優于EKF和UKF,可較好地實現對該模型的匹配。最后,基于所設計的仿真場景,采用基于粒子濾波的三維轉彎模型對機動目標進行了成功的跟蹤與攔截。
1 彈目運動模型的建立
1.1 目標三維轉彎模型的建立
文獻[5-7]提出了HGB機動形式,為戰斗機提供了一種規避導彈追蹤的合理方法,其機動模型可描述為
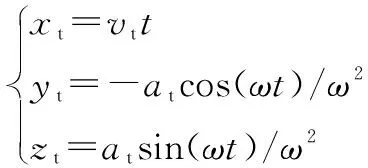
(1)
把上述模型寫成狀態方程的形式:

(2)
對做HGB機動的目標進行跟蹤,首先要建立適合的機動目標跟蹤模型,本文選取彈目相對距離及其速率和轉彎角速率作為狀態量,根據彈目之間的運動關系,可得到以下非線性模型:
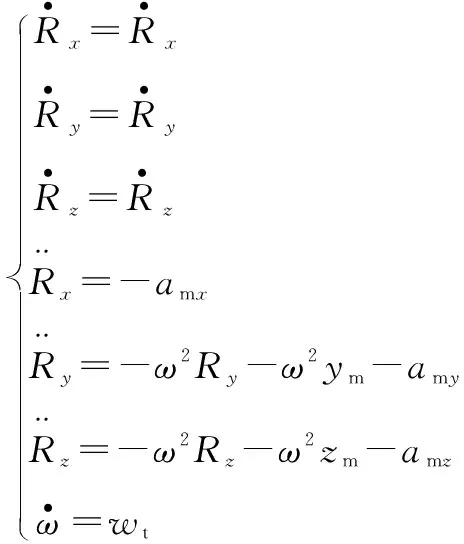
(3)
式中:,,分別為,,方向上的彈目相對距離;為轉彎速率;,分別為導彈在,方向上的位置;m,m,m分別為導彈在,,方向上的加速度;為系統噪聲。
觀測方程為

(4)
式中:和為視線傾角和視線偏角;和為觀測噪聲。
1.2 導彈動力學模型的建立
式(3)將導彈的運動信息作為確定性變量引入了狀態方程中,因此,需要對導彈建立合理的、可信的運動模型。
導彈采用比例導引法攔截目標,分別計算俯仰和偏航兩個方向上的過載指令:

(5)

(6)

設定導彈發動機在時刻熄火(取=5 s),則導彈的推力可表示為
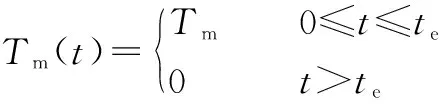
(7)
導彈飛行時的空氣阻力為

(8)
綜上,可建立發射后導彈的運動學模型如下:
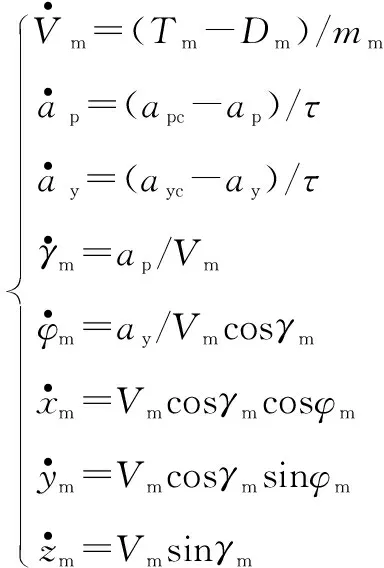
(9)
式中:,,分別為導彈在,,方向上的位移;為導彈的速度;為彈道傾角;為方位角。
2 濾波算法的選擇
2.1 不同非線性濾波方法的原理
對于式(3)~(4)所示的三維轉彎模型所呈現出的強非線性特性,需要選擇與之匹配的非線性濾波算法對目標狀態進行有效估計。對于非線性濾波問題,比較通用的方法是利用線性化技術將非線性濾波問題轉化為一個近似的線性濾波問題,再根據卡爾曼濾波理論求解,得到問題的次優解。這種利用線性化的思想得到的濾波方法即為擴展卡爾曼濾波。
無跡卡爾曼濾波同樣采用了卡爾曼濾波框架,對于一步預測方程,使用UT變換來處理均值和協方差的非線性傳遞問題。UKF是用一系列確定樣本來逼近狀態的后驗估計,不需要求解雅克比矩陣,對于非線性分布的統計量有較高的計算精度。


(10)


(11)
2.2 不同濾波方法的仿真對比分析
為了對比各濾波算法的跟蹤性能,分別采用PF, EKF, UKF對三維轉彎模型的狀態進行估計。考慮到式(3)所示的模型狀態量較多,因此在濾波算法仿真對比時將模型進行如下簡化:
(12)
式中:為目標的位置;為轉彎角速率(設定其真值為=8330+02);為系統噪聲。
仿真中,三種濾波算法采用同樣的初值、系統噪聲和觀測噪聲。為比較其估計性能,文中采用統計學中的均方根誤差來衡量濾波偏差,其中,位置估計均方根誤差和轉彎角速率估計均方根誤差分別為
(13)


(14)
(15)

(16)
三種濾波算法對目標位置及轉彎角速率估計的均方根誤差和CRLB下界的對比圖,如圖1~2所示。

圖1 位置估計的均方根誤差Fig.1 Root mean square error of position estimation
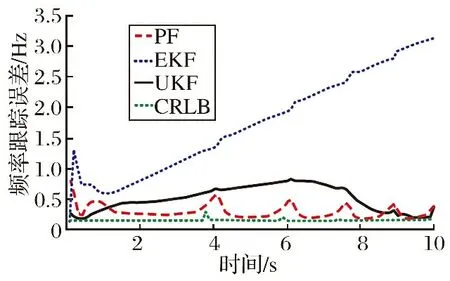
圖2 角速率估計的均方根誤差Fig.2 Root mean square error of angular velocity estimation
從圖中可以看出,PF對目標位置和角速率估計的均方根誤差明顯低于EKF和UKF估計的均方根誤差,并且PF的均方根誤差更接近于各狀態的CRLB下界,因此,PF對非線性模型的各狀態量有更好的估計效果。
為了較全面地比較三種濾波算法的性能特點,利用各濾波算法連續仿真100次,各濾波算法的單次程序運行時間對比,如圖3所示。從圖中可以看出,PF的計算量最大,UKF次之,EKF的計算量最小。
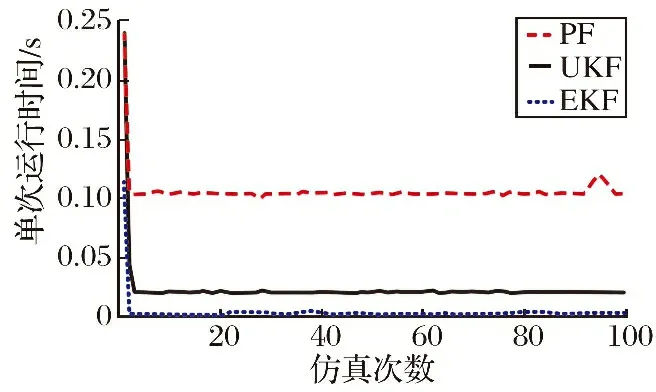
圖3 各濾波算法計算量對比Fig.3 Comparison of calculation amount of each filtering algorithm
相較于EKF和UKF,雖然PF有較大的計算量,但PF對非線性模型的各狀態量有更高的估計精度,因此,為了對機動目標進行準確、可靠的跟蹤,本文選擇用PF作為三維轉彎模型的匹配濾波算法。
3 仿真驗證與分析
3.1 三維轉彎模型的仿真對比分析
為了驗證三維轉彎模型的跟蹤性能,分別采用CA模型、三維轉彎模型對做HGB機動的目標進行跟蹤。仿真中,目標做轉彎角速率固定的HGB機動,并采用同樣的初值和噪聲。文中采用均方根誤差來衡量跟蹤誤差,兩種目標模型對目標速度估計的均方根誤差對比圖,如 圖4所示。

圖4 不同模型的速度估計誤差對比Fig.4 Comparison of velocity estimation error of each model
從圖中可以看出,在對目標進行跟蹤的過程中,三維轉彎模型的跟蹤誤差低于CA模型的跟蹤誤差,因此,三維轉彎模型有更高的跟蹤精度,可以對HGB機動目標進行更有效的跟蹤。
3.2 三維轉彎目標跟蹤仿真驗證
為了驗證基于粒子濾波的三維轉彎模型對做HGB機動目標跟蹤的有效性,設計了導彈攔截HGB機動目標的具體仿真場景,仿真參數如表1所示。

表1 仿真參數設置
仿真中采用易于實現的先驗分布作為粒子濾波的重要性分布函數:

(17)
此時,各粒子對應的重要性權重可簡化為

(18)
此外,除了選擇合理的重要性分布函數,文中還采用了重采樣技術,這在一定程度上避免了粒子濾波中的粒子退化問題,保持了粒子的多樣性,從而使粒子濾波對目標的狀態能夠進行有效估計。
采用式(5)~(6)所示的比例導引律進行仿真,可得,導彈成功攔截目標的仿真時間為16.3 s,脫靶量為2.36 m,具有較高的攔截精度。仿真結果驗證了基于粒子濾波的三維轉彎模型對機動目標跟蹤的有效性。
HGB機動的各狀態量估計,如圖5所示。從圖5中
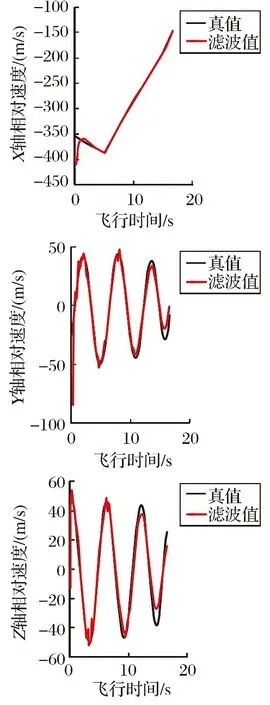
圖5 HGB機動的各狀態量估計Fig.5 HGB maneuver state estimation
可以看出,粒子濾波能對各個狀態量進行較為理想的估計。在制導末端,有些狀態量估計精度變差,這是因為由比例導引法得到的過載指令在彈道末端會有明顯的抖動,而系統狀態方程是以導彈的運動信息作為確定性變量,因此對估計精度具有一定的影響。
當目標在空間中以復雜的形式進行機動時,導彈依然能成功攔截目標,攔截過程中導彈和目標各運動狀態的對比圖,如圖6~7所示。在制導末端,指令過載會急劇增大,很容易會超過導彈的過載限幅,這反映了末制導階段的特點,對制導算法的優化具有一定的參考意義。
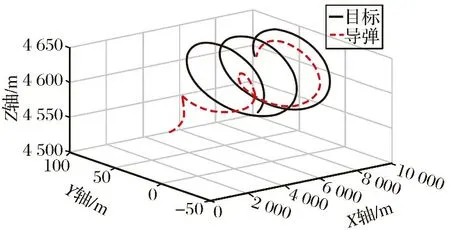
圖6 彈目三維交戰軌跡Fig.6 Missile-target 3D engagement trajectory
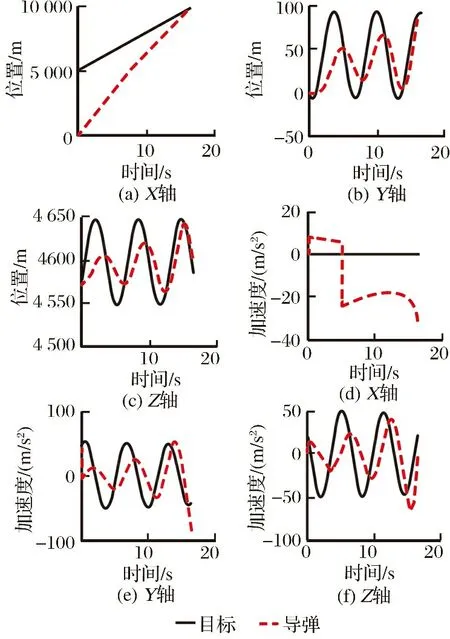
圖7 彈目各運動狀態對比Fig.7 Comparison of missile-target motion states
4 結 論
針對目標發生轉彎的運動模式,提出了三維轉彎模型,然后對三維轉彎模型的跟蹤性能進行了對比驗證,并基于此模型對不同濾波算法的性能進行了仿真對比,最后選擇用粒子濾波對基于三維轉彎模型的機動目標進行跟蹤。從仿真結果可以得出以下結論:
(1) 本文提出了三維轉彎模型,仿真結果表明,對于一些機動形式復雜的目標,相較于CA模型,三維轉彎模型有更高的跟蹤精度。
(2) 文中設計了一種基于粒子濾波的三維轉彎模型,仿真結果表明,粒子濾波對三維轉彎模型的各狀態量具有更高的估計精度,這種機動目標跟蹤方法對做HGB機動的目標具有良好的跟蹤效果。
(3) 建立了導彈在攔截過程中較為合理、可信的動力學模型,得到了相對真實的導彈運動過程。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
