應用于博物館的智能導覽系統
2022-08-17 09:17:32王智鐸楊軍凱劉建聰
電子制作 2022年14期
王智鐸,楊軍凱,劉建聰
(華北理工大學人工智能學院,河北唐山,063210)
關鍵字:iBeacon室內定位;自動循跡避障;語音播報;可視化界面
0 引言
隨著生活水平的不斷提高,人們對旅游的需求也在逐漸增大,在此背景下景區的導覽方式也在進行著變化,由傳統的講解員到現代導覽系統,傳統的講解員能夠提供生動形象的講解并能夠及時為旅客答疑,但是存在著講解水平參差不齊、人數有限等問題,無法滿足現代導覽行業的需求,而現代導覽系統是主要是通過電子導覽的方式實現旅客的自助導覽,能夠有效解決講解員少等傳統導覽方式所造成的問題,但是也存在功能不完善、不能滿足景區個性化需求、不易操作等問題。現階段我國大部分導覽是依靠講解員與現代導覽系統相結合的方式,由于新一輪科技革命和產業變革的深入發展,數字化、網絡化、智慧化也在不斷地影響著旅游業的發展,導覽系統的智慧化顯得尤為重要,因此針對上述問題,本文設計了一種基于iBeacon 定位技術的智能導覽系統,通過iBeacon 信標對導覽車定位,以實現定位講解的功能。本導覽系統具有智能化講解等優點,能夠滿足旅客的需求,提升博物館等室內場所的核心競爭力,并促進其轉型升級。
1 導覽系統簡介
為了提高博物館等室內場所的社會效益和核心競爭力,為了解決博物館內講解員的培訓周期長、業務能力、服務質量不一等問題,設計了一種基于iBeacon 的通信智能導覽系統[1]。本導覽系統依靠iBeacon 室內定位技術實現整個室內的精準定位,配備多種傳感器實現導覽車的循跡與自動避障,采用百度地圖對博物館內的場景建模和實現定位追蹤與搭建可視化平臺,實現導覽車—定位系統—網站地圖的軟硬件相結合的一體化設計,導覽車結構如圖1 所示。

圖1 智能導覽車示意圖
2 技術路線
■2.1 定位部分
由多組藍牙網關與iBeacon 信標組合實現特定場景的室內定位,設計流程如圖2 所示。使用藍牙中繼網關掃描室內場景中所有可以搜索到的iBeacon 設備[2],獲取導覽車的數據信息和RSSI 值,并將獲得數據上傳至服務器對RSSI值進行處理,RSSI 值可以確定iBeacon 設備與藍牙網關的距離或者范圍,實現位置追蹤的目的,如圖3 所示。

圖2 定位部分設計流程圖

圖3 運行測量結果
運用RSSI 的Range—based 無線傳感器網絡定位算法,擬合場景內的RSSI 衰減模型,確保在室內干擾下定位數據足夠精準,并在百度地圖上進行位置標注,顯示網關的具體位置,實現室內對導覽車的定位追蹤。

圖4 定位坐標圖
■2.2 電控部分
導覽車的底盤使用STM32F103 作為芯片,使用12V1.5AH 鋰電池供電,使用帶編碼器的直流減速電機作為動力,直流電機驅動模塊采用TB6612 驅動芯片實現導覽車的運動和轉向,使用PWM 對導覽車進行調速。
導覽車電控部分包括STM32 主控板,12V 電機,編碼器,麥克納姆輪,兩個TB6612FNG 電機驅動模塊,一個電源模塊,三個超聲波模塊以及循跡模塊,一個12V1.5Ah 鋰電池,STM32 與TB6612FNG 連接如圖5 所示。
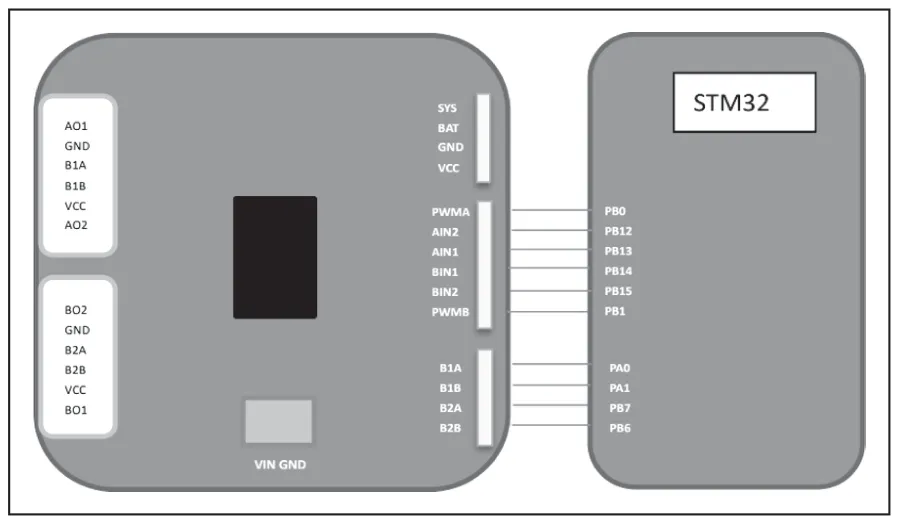
圖5 STM32 與TB6612FNG 連接圖
避障功能使用HC-SR04 型號的超聲波傳感器模塊[3],測量導覽車與周圍障礙物的距離,導覽車在前進過程中,單片機接收到此模塊的數據后,通過判斷與障礙物的距離,并采用PWM 脈寬調制,控制電機轉速以實現導覽車運動狀態的改變。超聲波避障的程序流程如圖6 所示。

圖6 超聲波避障程序流程圖
自動循跡功能采用TCRT5000 紅外反射傳感器,實現導覽車循黑線進行導覽,此外,使用iBeacon 定位技術將導覽車的位置反饋到后臺上,便于博物館管理人員觀察各個導覽車的位置及工作狀態,方便管理。循跡模塊程序流程如圖7 所示。

圖7 循跡模塊程序流程圖
■2.3 可視化部分
導覽車配備實時更新的可視化界面,博物館管理員通過移動端瀏覽器、微信小程序了解各個導覽車的實時位置、工作狀態和剩余電量等信息。方便實時監控導覽車的狀態及位置,對導覽車進行及時維護。
利用現有的JavaScript SDK(基于HTML5 和WebGL技術的瀏覽器應用程序接口)開發可視化界面[4],通過接收阿里云發送的JSON 數據包,解析并更新界面地圖中導覽車的信息。
■2.4 系統整體運行
系統整體運行時,首先使用藍牙網關中的三點定位技術,與iBeacon 信標相結合,完成服務器對場景的高精度建圖以及導覽車的定位。利用樹莓派來處理藍牙網關的位置信息,通過串口通信傳輸給導覽車,導覽車由STM32 單片機作為主控芯片控制運行,進行循跡和自動避障,帶領游客前往指定地點同時進行語音播報講解。樹莓派將位置數據上傳到阿里云,并開發網頁,設定前端接收阿里云JSON數據包,更新網頁數據,實現導覽的可視化,系統流程如圖8 所示。
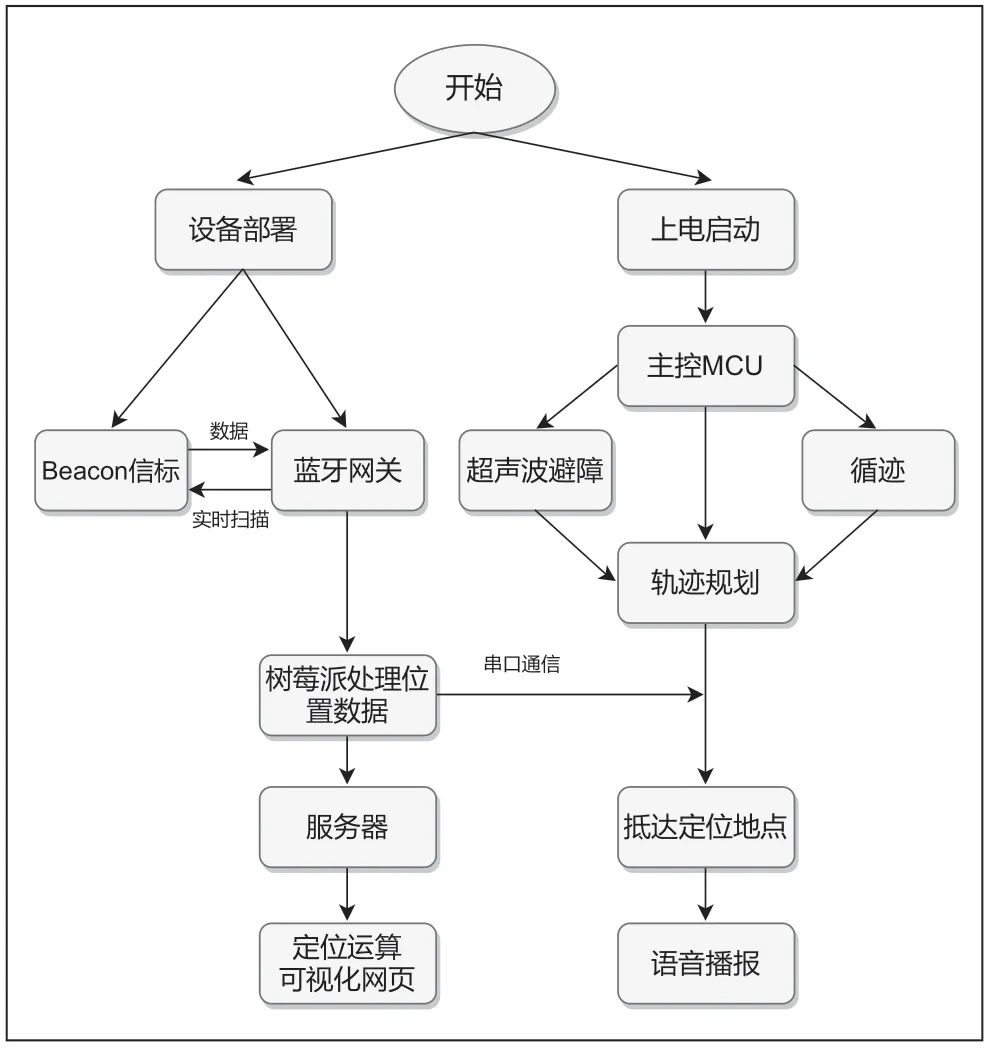
圖8 系統整體流程圖
3 技術特點
(1)定位部分采用iBeacon 三點定位技術,對導覽車進行實時定位,通過高斯濾波算法對數據進行濾波,使定位更加可靠準確。
(2)系統使用STM32 單片機控制導覽車驅動,實現導覽車的自動避障與循跡,多種傳感器智能化感知周圍環境,實現路徑的規劃與導覽播報功能。
(3)可視化界面利用現有的 JavaScript SDK 進行網站開發,通過接收JSON 數據包,解析并更新網站界面地圖中導覽車的位置信息。可視化界面是服務于博物館管理員,使其及時了解導覽車的位置,便于及時調控導覽車。
4 系統實物測試
我們將iBeacon 設備等距離部署在一個放有幾張桌子做障礙物的屋子內,調整桌椅的擺放用以模擬一個博物館的場景。由于iBeacon 信標放置的高度越低時存在的干擾變量越多,因此將信標放置在高度為2m 的情況下,每次測量中其他變量都保持不變,每隔2.5m 測量一次藍牙網關與三個不同iBeacon 信標的RSSI 值,測量范圍為0~25m,每個設備間的距離測量50 組,將所得的所有數據利用MATLAB 軟件進行擬合,得到三條近乎貼合的曲線,求得環境衰減因子,如圖9 所示。經過實際場景的測試,距離跟實際位置的誤差范圍僅有不到0.5m,可以較完美的實現路徑與可視化界面相結合。

圖9 環境因子測量
5 結束語
本導覽系統運用STM32 控制導覽車運行,藍牙網關與iBeacon 進行定位,并開發可視化界面,使得管理人員實時了解導覽車的運行路線,本導覽系統的實行可為游客提供全方位的服務,從而提升博物館等室內游覽場所的科技文化內涵。
隨著智能導覽系統的逐步應用,導覽服務將更加個性化,導覽車替代導游的同時也可以作為信息的載體,可以在顯示屏上設置廣告及相關推廣信息,從而獲得較大的經濟效益、環保效益和社會效益。隨著導覽系統的推廣使用,可以將科技融入人們的日常生活,從而促進室內展覽的改革發展。
猜你喜歡
世界科學技術-中醫藥現代化(2022年3期)2022-08-22 00:32:50
云南化工(2021年8期)2021-12-21 06:37:54
當代陜西(2020年13期)2020-08-24 08:22:02
海洋信息技術與應用(2020年1期)2020-06-11 12:43:56
小太陽畫報(2020年4期)2020-04-24 09:28:22
傳媒評論(2019年4期)2019-07-13 05:49:14
制造技術與機床(2017年5期)2018-01-19 02:49:17
濰坊學院學報(2016年2期)2016-12-01 13:00:11
童話王國·原創版(2016年4期)2016-11-23 16:06:06
兒童故事畫報·智力大王(2015年11期)2016-01-27 00:55:01