基于空時約束的自適應迭代單脈沖估計方法
2022-08-18 01:43:44熊元燚謝文沖
系統工程與電子技術 2022年8期
關鍵詞:方法
熊元燚, 謝文沖
(空軍預警學院雷達兵器運用工程軍隊重點實驗室, 湖北 武漢 430019)
0 引 言
機載雷達的基本功能是發現目標并對目標的參數進行測量,即信號檢測與參數估計。其中,信號檢測是在雜波和噪聲背景中確定目標信號是否存在,通常是通過雜波抑制技術結合恒虛警率檢測(constant false alarm rate, CFAR)技術來實現。在確定目標存在的基礎上,還需要對目標信號的參數進行估計。參數估計的對象包括目標的距離、角度和多普勒頻率等。本文主要研究對目標角度和多普勒頻率的估計問題,由于從參數估計的角度看,角度參數估計和多普勒頻率參數估計的方式是一樣的,因此本文將其統稱為角度估計。
通常情況下,可以將機載雷達波束指向作為目標所在方向,輸出功率最大的多普勒濾波器的中心頻率作為目標的多普勒頻率,其參數估計精度由波束寬度和相干積累時間決定。在實際工程中該方法的參數估計精度較差,通常無法滿足需求。目前,角度估計主要有兩種思路:一是最大似然(maximum likelihood,ML)方法,二是單脈沖估計方法。ML估計是一種最優估計,理論上可以達到克拉美-羅界,但其運算量過大,不利于實現。因此,實際工程中一般采用運算量較小的單脈沖方法,其本質上是ML估計的近似。單脈沖估計方法同時形成多個接收波束,通過比較單個回波信號在多個接收波束的響應,從而獲得目標角度參數。常用的單脈沖方法為和差比幅法。通過計算差和比,并比對單脈沖曲線,即可獲得目標偏離波束指向的偏角信息。單脈沖方法能夠利用單個回波脈沖進行角度估計并在分辨力上突破波束寬度的限制。
在雜波和干擾環境下,傳統單脈沖估計方法的和差權值為自適應權值,該方法雖然能夠在目標位于副瓣雜波區時保持相對較好的估計性能,但當目標落入主瓣雜波區時,其估計性能將嚴重下降。為了在抑制主瓣雜波的同時保持較好的角度估計性能,在傳統單脈沖估計方法的基礎上,學者們相繼提出了多種改進的自適應單脈沖方法。Fante提出了基于空域多點約束的空時自適應處理(space-time adaptive processing, STAP)單脈沖方法,通過約束自適應差波束使得單脈沖比曲線盡可能與靜態單脈沖比保持一致,在一定程度上改善了單脈沖曲線的失真問題。陳功等人和李永偉等人將該思想分別拓展到方位-多普勒頻率二維約束和方位-俯仰-多普勒頻率三維約束,進一步提升了測角性能。但是上述方法均未考慮多參數估計之間存在的相互耦合問題。Xu等人提出了基于和差波束同時約束的自適應單脈沖方法,該方法首先對和波束進行空時約束,確保在雜波和干擾環境下和波束不失真;然后對差波束進行多點約束,一方面確保差波束為和波束的導數,另一方面消除多普勒頻率與角度估計之間的耦合性,通過上述約束顯著改善了干擾目標環境下的角度估計性能。但該方法在主瓣雜波區由于對和波束的強制約束以及約束對系統自由度的消耗,導致雜波抑制性能存在一定程度下降。此外,Nickel提出了廣義單脈沖估計方法,即在經典單脈沖估計方法的基礎上,通過斜率修正矩陣和單脈沖比修正因子實現對參數的精確估計。該方法一方面緩解了差波束必須是和波束導數的苛刻要求,另一方面解決了多參數估計之間的耦合問題。但是該方法存在的問題是在雜波和強干擾環境下性能下降明顯。
針對上述問題,本文提出了的一種基于空時約束的自適應迭代單脈沖參數估計方法。該方法的特點包括:① 通過導數約束和零點約束確保形成最優的差波束;② 利用廣義單脈沖估計參數,消除多參數之間的耦合問題;③ 通過自適應迭代方式進一步提高參數估計精度。
1 廣義單脈沖估計
傳統的和差單脈沖估計方法是ML估計的一種特殊形式,但是前提是差波束與和波束之間必須滿足導數關系,且為均勻平面陣天線。但是在實際情況下上述兩個條件通常并不滿足。針對該問題,文獻[30]提出了廣義單脈沖估計方法,具體表達式為

(1)
單脈沖比為
(2)
式中:Δ和Δ分別表示角度域和多普勒頻率域差波束權值;表示和波束權值;表示機載雷達回波數據。
單脈沖比修正因子為

(3)
式中:(,0)表示空時導向矢量。
斜率修正矩陣的逆矩陣的元素為

(4)

(5)

(6)

(7)
式中:(,0)和(,0)分別表示(,0)對和的一階導數。
對于廣義單脈沖估計方法,在純噪聲背景下可以預先計算得到各個目標位置的斜率修正矩陣和單脈沖比修正因子,在實際中結合當前計算得到的單脈沖比與預先存儲的參數即可得到待估計的參數值。但是在實際機載雷達環境中,和差波束對應的自適應權值通常與回波數據有關,導致斜率修正矩陣和單脈沖比修正因子也與數據相關,因此各參數無法預先進行存儲。
在忽略常系數的前提下,式(1)中雜波環境下的自適應和差權值形式為

(8)

(9)

(10)
式中:Σ表示角度和多普勒域均加Chebyshev錐銷;Δ表示角度域加Bayliss錐銷,多普勒域加Chebyshev錐銷;Δ表示角度域加Chebyshev錐銷,多普勒域加Bayliss錐銷。
2 約束類單脈沖估計
當目標位于無雜波區時,傳統單脈沖估計和廣義單脈沖估計具有相對較好的參數估計性能。但當目標位于主瓣雜波或者干擾附近時,由于雜波和干擾凹口的形成使自適應和差方向圖畸變,導致單脈沖比與角度偏差之間的關系為非線性,其估計性能將嚴重下降。針對該問題,約束類單脈沖估計方法通過對和差權值進行強制約束,改善了單脈沖比曲線的失真問題。
約束類單脈沖估計方法分為兩類。第1類是分別在角度域、空時二維域和方位-俯仰-多普勒三維域對差權進行約束,目的是確保約束點處的差和單脈沖比為常數。該類方法的缺點是僅保證了有限個約束點處的參數估計性能,而且如果約束點過多,則會消耗大量的系統自由度,導致雜波抑制性能下降。此外,該類方法未考慮多參數估計之間的耦合問題。第2類是文獻[23]提出的自適應單脈沖估計方法,該方法的特點是一方面對自適應和波束進行約束,確保其在雜波附近保形;另一方面對自適應差波束進行約束,確保差波束為和波束的導數且零點對準波束指向。該類方法的缺點是由于增加了對和波束的保形約束,導致應該形成的雜波凹口無法形成,在主瓣雜波區附近的雜波抑制性能下降明顯。
3 基于空時約束的自適應迭代單脈沖估計方法
通過上述分析可知,傳統的和差單脈沖估計、廣義單脈沖估計和約束類單脈沖估計各有優缺點。此外,噪聲信號的隨機性導致單脈沖測角結果不可避免地存在一定的測量誤差;實際中的差波束與和波束之間不一定滿足嚴格的導數關系。針對上述問題,本文提出一種基于空時約束的自適應迭代單脈沖估計方法。該方法首先在現有角度和多普勒差波束的基礎上通過導數約束和零點約束確保所形成的差波束為最優差波束;然后利用廣義單脈沖法進行參數估計,解決多參數估計之間存在的相互耦合問題;最后通過自適應迭代方式進一步提高目標參數的估計精度。
3.1 基本原理
從最大似然估計的角度看,最優差波束應為和波束的導數,同時在主波束指向處增益為零。本方法中的(,)域差波束權值對應的數學表達式為
(11)

(12)
可以求得

(13)

(14)
其中

(15)

(16)
(17)
在得到最優差波束權的基礎上利用式(2)計算角度和多普勒單脈沖比,然后代入式(1)進行參數估計,其中單脈沖比修正因子由式(3)求得,斜率修正矩陣由式(4)~式(7)求得。
通過廣義單脈沖技術測量得到目標參數后,需進一步通過迭代方式改善參數估計精度,即利用每次估計結果代替式(1)中的參數和0,同時更新相應的空時導向矢量和目標信號矢量,直至輸出信號功率不再增加為止。
3.2 實現步驟
本文所提方法的主要實現步驟如下:
令初始角度和歸一化多普勒頻率分別為和0,其中表示主波束指向,0表示目標所在多普勒濾波器的中心頻率;
利用回波數據和式(8)、式(13)和式(14)分別求得自適應和權和差權;
利用回波數據和式(2)~式(7)分別求得單脈沖比、單脈沖比修正因子和斜率修正矩陣;



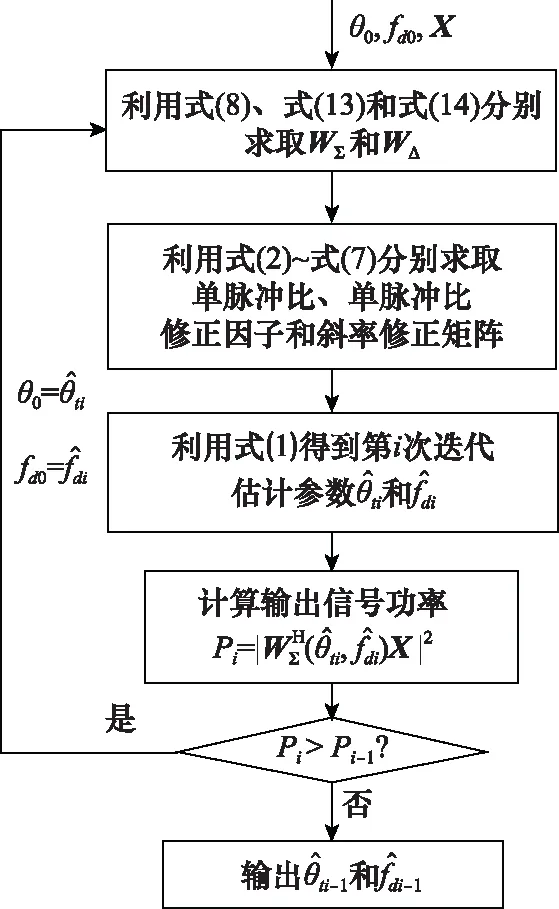
圖1 本文方法流程圖Fig.1 Flow chart of the proposed method
4 仿真分析
機載雷達仿真參數設置如表1所示,其中主瓣雜波位于90°方向,歸一化多普勒頻率為0。同時在仿真數據中插入的9個目標參數如表2所示。在本節中為了說明本文所提方法的有效性,以文獻[20]、文獻[19]和文獻[23]方法作為比較對象,本節分別稱為Fante方法、Nickel方法和Xu方法。
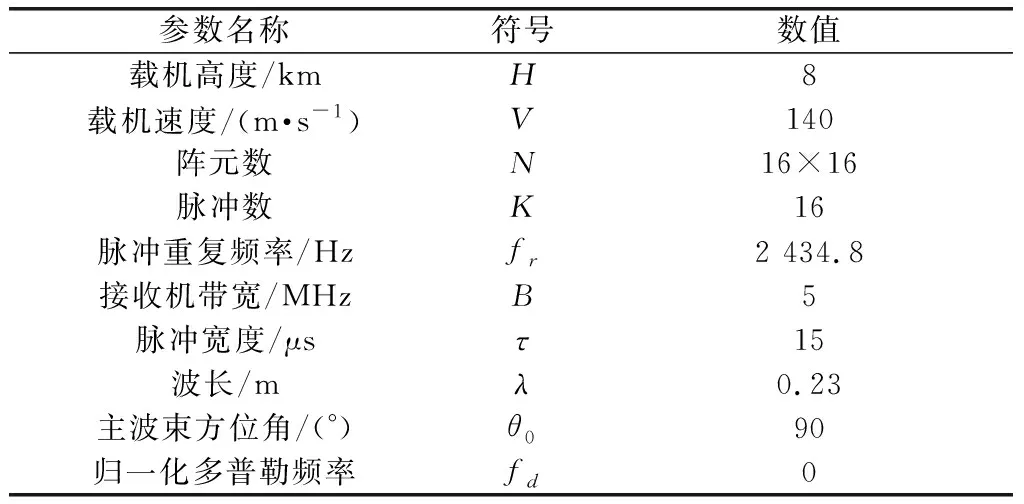
表1 機載雷達仿真參數
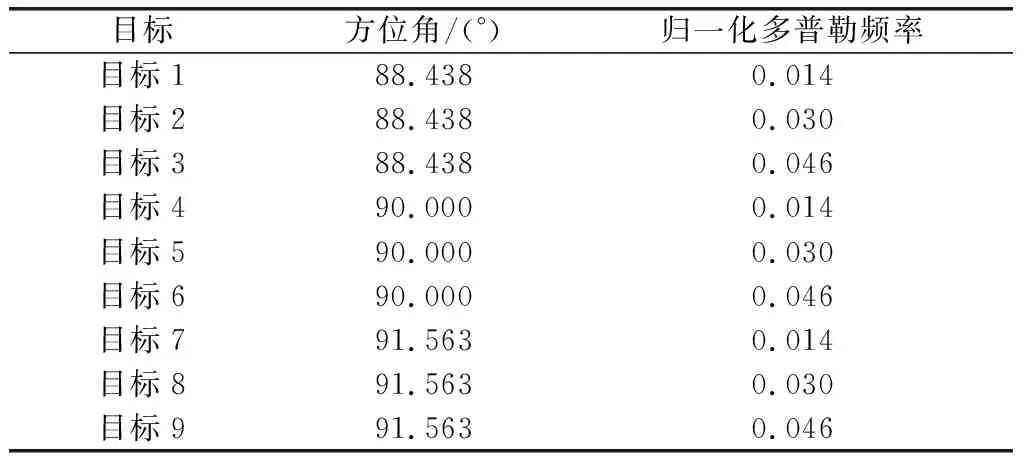
表2 仿真目標參數
自適應差方向圖比較
圖2給出了本文所提方法對應的自適應和差方向圖,其中波束指向對應的方位角為90°,歸一化多普勒頻率為0.03。從圖中可以看出,自適應和方向圖在(90°,0.03)處形成高增益,兩個自適應差方向圖在(90°,0.03)處形成零點,同時3個波束均在雜波處形成深凹口。
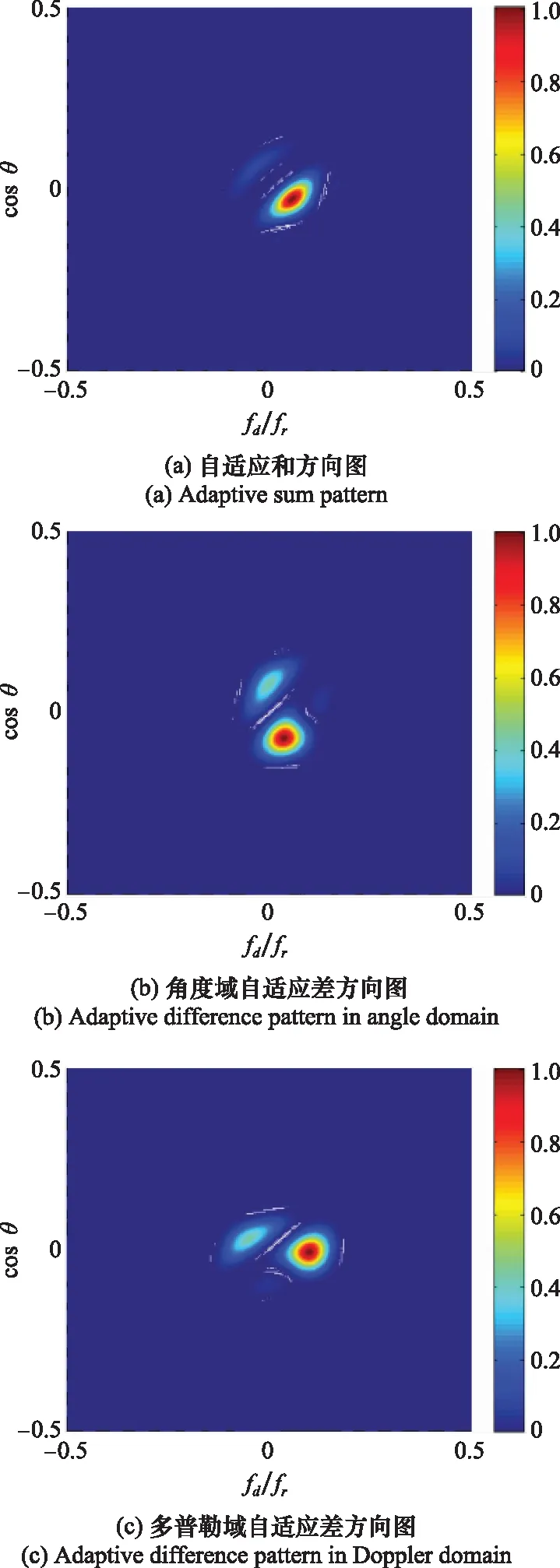
圖2 自適應和差方向圖Fig.2 Adaptive sum and difference pattern
表3和表4分別給出了角度域和多普勒域副瓣電平,圖3給出了不同方法對應的自適應角度差方向圖和多普勒差方向圖,其中預設波束指向在方位角余弦域和歸一化多普勒域的位置為(0,0.03),其對應的雜波位置分別為0.06和0。從圖3、表3和表4可以看出:① 噪聲背景下的自適應差方向圖僅在預設波束指向處形成深凹口,而在雜波處無凹口;② Nickel方法因對差波束未進行有效約束,導致其僅在雜波處形成凹口,但在目標位置處未形成有效零點;③ 本文方法、Fante方法和Xu方法因對差波束進行了有效約束,因此在雜波和目標處同時形成了凹口。但是相對而言,Fante方法的副瓣電平更高,其角度域峰值副瓣電平達到-6.010 dB,平均副瓣電平達到-9.718 dB,主瓣波束保形較差,其原因是該方法側重于對單脈沖比的約束,而非差波束形狀的約束。
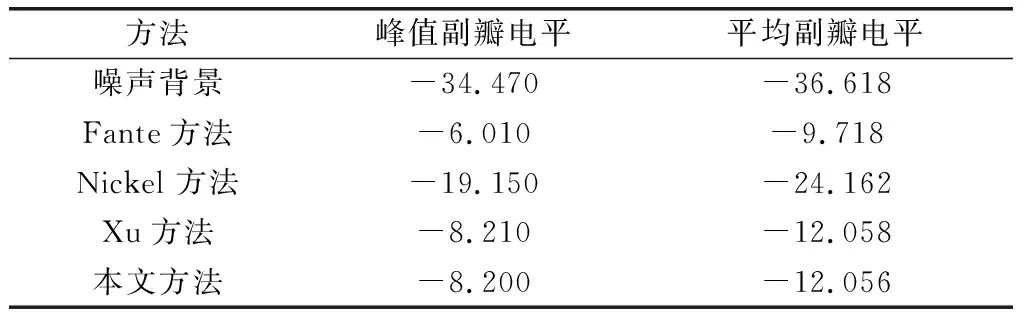
表3 角度域副瓣電平
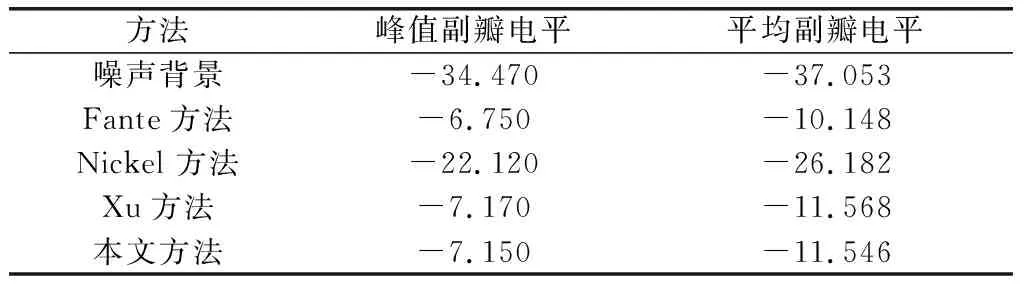
表4 多普勒域副瓣電平
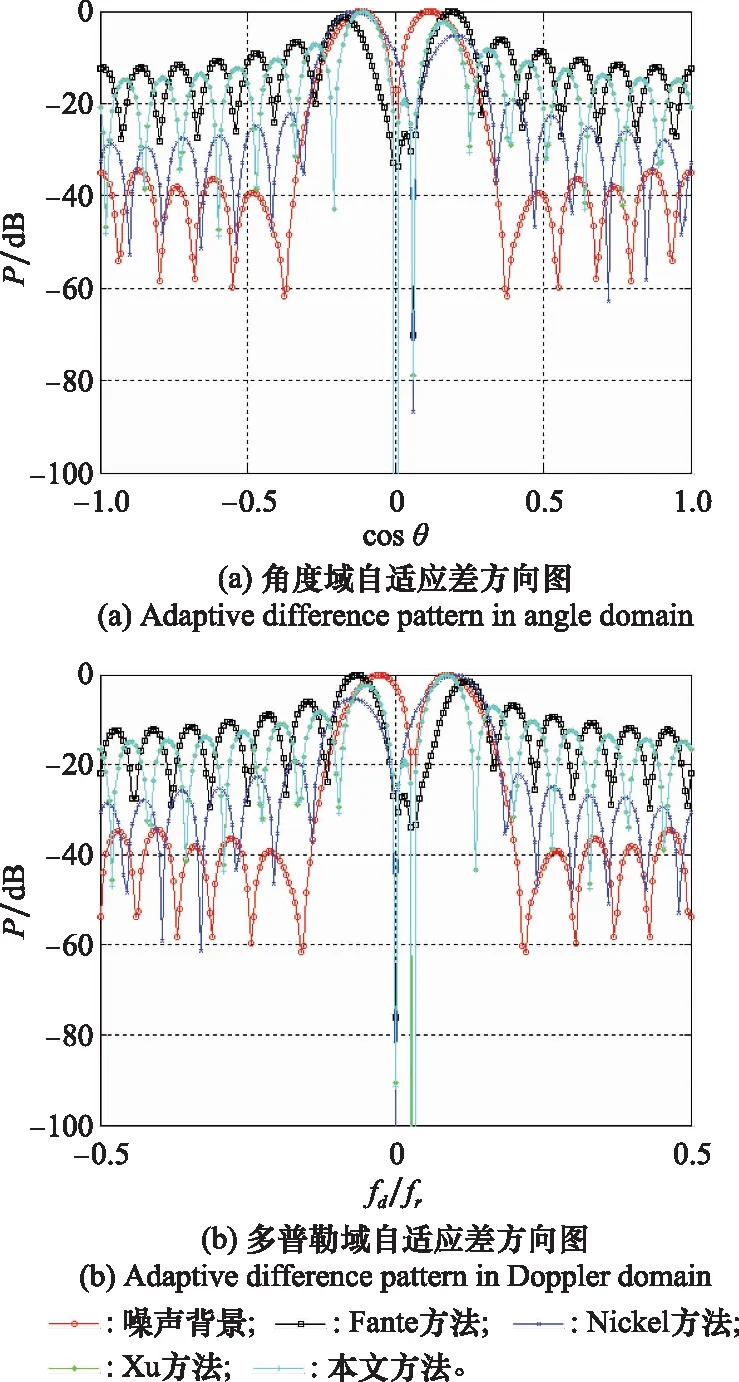
圖3 自適應差方向圖比較Fig.3 Comparison of adaptive difference patterns
迭代次數的影響
圖4給出了某一目標對應的參數估計偏差與迭代次數的關系。從圖中可以看出本文所提方法經過迭代處理后的參數估計偏差逐漸減小,通常僅需兩次迭代即可實現穩定收斂。
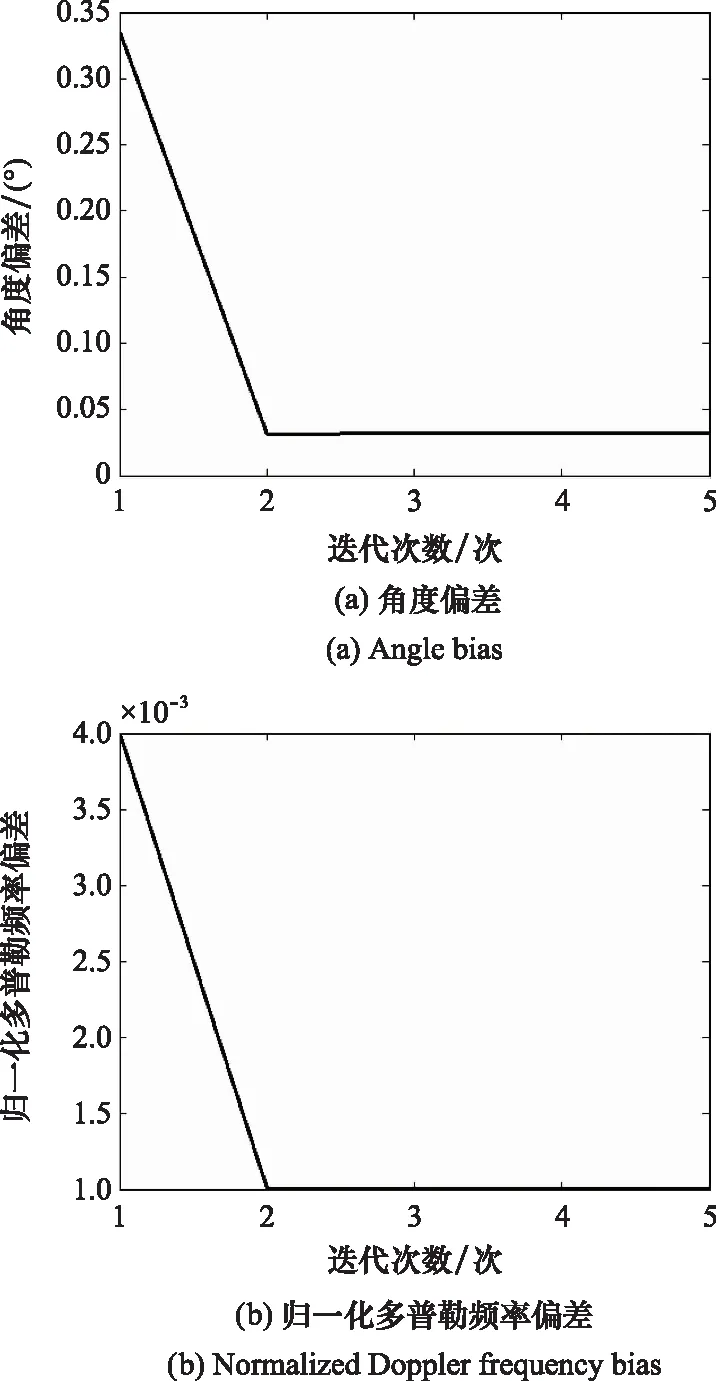
圖4 參數估計偏差與迭代次數的關系Fig.4 Relationship between parameter estimation bias and iteration number
信噪比的影響分析
圖5給出了某一目標對應的參數估計精度隨信噪比(signal noise ratio,SNR)變化關系,其中參數估計精度以均方根誤差(root mean square error,RMSE)為測度。從圖中可以看出:① 克拉美-羅界給出了參數估計精度的性能上限,其次是純噪聲背景下的單脈沖估計方法,Fante方法性能較差,其原因是該方法僅對有限個點進行單脈沖比約束,而該目標恰好不在約束點上;② 新方法具有較好的參數估計精度,且隨著SNR的增大逐漸趨近于克拉美-羅界;③ Nickel方法由于其對應的差波束在該目標所在歸一化多普勒頻率0.03處未形成零點,如圖3(b)所示,因此其單脈沖比嚴重背離線性關系,導致其多普勒頻率估計精度相對較差。
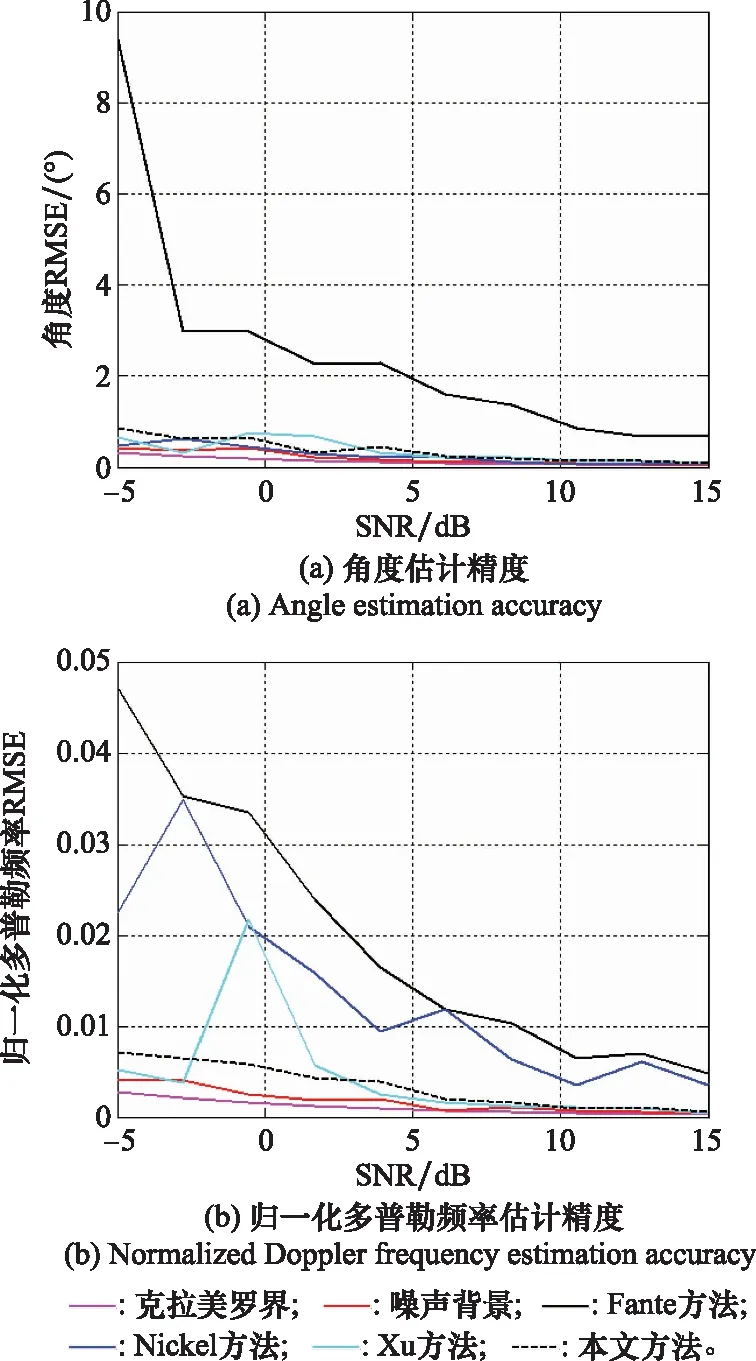
圖5 參數估計精度與SNR的關系Fig.5 Relationship between parameter estimation accuracy and SNR
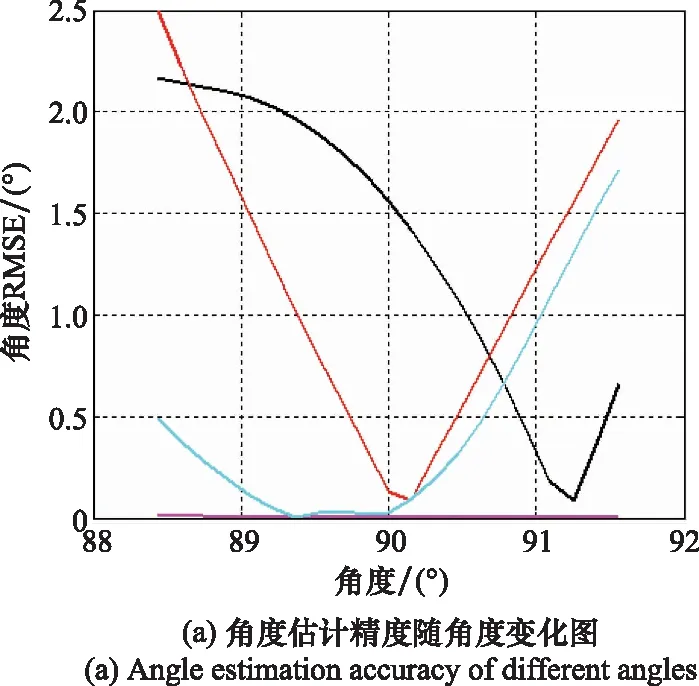
角度變化情況下算法性能比較
在表1參數下,機載雷達3 dB波束寬度為88.438°~91.563°。為比較本文方法與其他方法在目標角度變化時的性能,假設目標在3 dB主瓣波束寬度內,通過100次蒙特卡羅仿真,其結果如圖6所示。從圖中可以看出:① 噪聲背景下目標參數估計精度與角度無關;② 相對Fante方法和Nickel方法,本文方法和Xu方法在目標角度偏離波束指向較大時,仍具有較高的參數估計精度,具有強的魯棒性。
參數估計結果
圖7給出了各方法對預設的9個目標的參數估計結果,其中綠色點表示真實目標位置,紅色點表示估計目標位置,橫軸表示方位角,縱軸表示歸一化多普勒頻率,目標的真實坐標位置呈等間隔分布,估計得到的參數值處的十字型圖形表示角度和歸一化多普勒頻率估計對應的標準差,標準差定量分析結果如表5和表6所示。從圖中可以看出:① 由于無雜波影響,因此噪聲背景下的參數估計性能最優,且估計方差最小;② Fante方法和Nickel方法的整體性能較差,Xu方法在目標1和目標9處性能較差,其原因是Nickel方法的自適應和差波束在雜波附近失真,如圖3所示,Fante方法僅對有限個目標位置進行了約束,Xu方法雖然進行了多點空時約束,但是由于對和波束進行了保形約束,導致其在主瓣雜波區的雜波抑制性能下降;③ 本文所提方法的參數估計性能相對較優,除了目標1以外,其他8個目標的參數估計性能接近于純噪聲背景;④ 從目標1、目標4、目標7的估計性能可以看出,越靠近主瓣雜波,各方法的估計偏差和標準差越大,即參數估計性能越差。從圖3可知主雜波位于=8656°,=0,目標1與其他目標相比更接近于主雜波,因此參數估計性能差異較大。

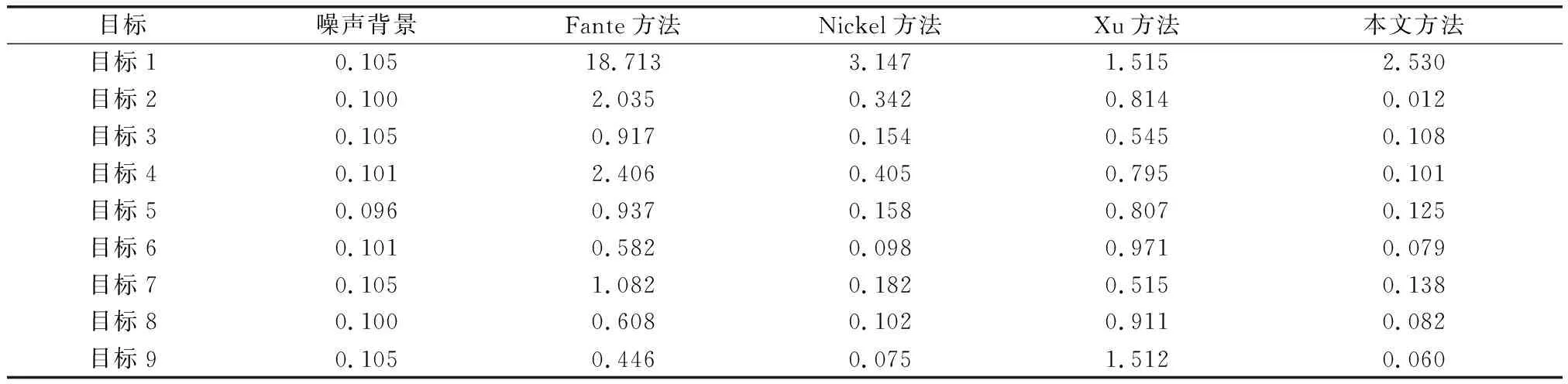
表5 多目標角度標準差比較
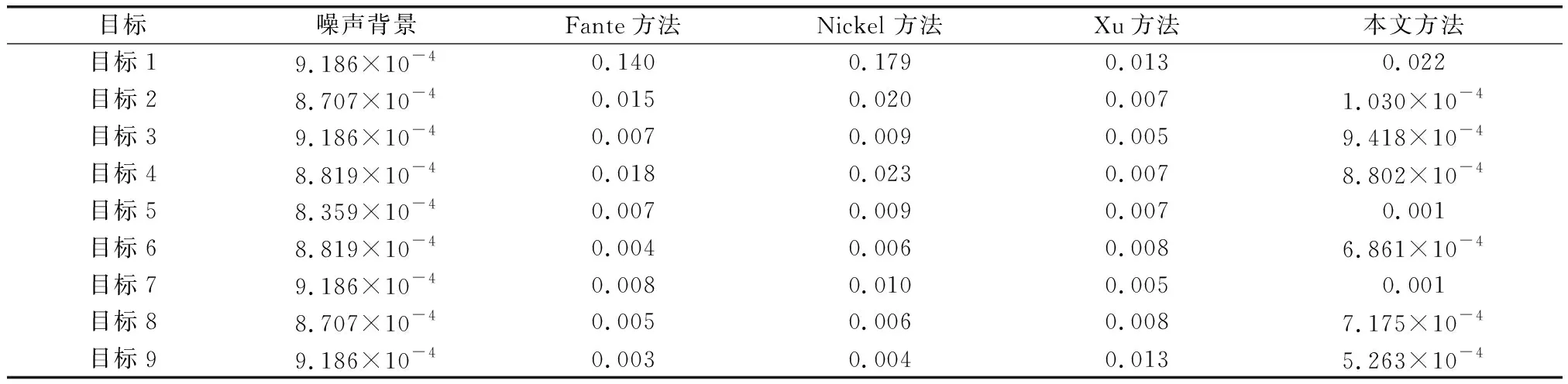
表6 多目標歸一化多普勒頻率標準差比較
5 結束語
本文研究了機載雷達空時自適應單脈沖估計方法。首先闡述了廣義單脈沖估計方法和約束類單脈沖估計方法的基本原理,在此基礎上提出了一種基于空時約束的機載雷達自適應迭代單脈沖估計方法,并通過仿真驗證了所提方法的有效性。本文所提方法通過導數/零點約束和迭代自適應處理等步驟有效提升了雜波環境下的目標參數估計性能,并能在強雜波環境下獲得與純噪聲背景接近的參數估計性能。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56