小偏心率空間碎片天基短弧定軌方法和實驗
2022-08-18 01:44:42李大衛彭喜衍解延浩
系統工程與電子技術 2022年8期
李大衛, 劉 靜, 彭喜衍, 張 耀, 解延浩
(1. 中國科學院國家天文臺, 北京 100101; 2. 國家航天局空間碎片監測與應用中心, 北京 100101;3. 中國科學院大學, 北京 100049; 4. 長光衛星技術有限公司, 吉林 長春 130033)
0 引 言
數量巨大的空間碎片,對航天器在軌安全運行造成嚴重影響。天基光學空間碎片探測具備覆蓋廣、探測能力強等特點,是空間碎片探測的重要手段和發展方向。基于歐空局2009年公布的空間碎片密度模型,利用文獻[1]所述的空間碎片軌道反演方法,反演了1~10 cm空間碎片軌道。統計表明,尺寸大于1 cm的在軌空間碎片數量約為90萬,其中尺寸大于10 cm的編目空間物體數量僅2萬余個。因此,外空存在大量尺寸介于1~10 cm的未編目在軌空間物體,威脅在軌航天器的安全。天基光學探測避免了大氣消光的影響,同口徑的望遠鏡探測能力更強,是探測小尺寸空間碎片的優勢設備。天基光學望遠鏡的監測數據大部分都是短弧數據。因此,建立短弧數據初始軌道計算、數據關聯、編目定軌模型是有效利用天基光學數據發現空間碎片、確定空間碎片軌道的重要途徑。對于地基測角資料,較為成熟的初軌定軌技術包括廣義拉普拉斯方法、參考矢量法、雙ρ法等。利用天基短弧光學數據計算初始軌道時,廣義拉普拉斯法、參考矢量法等這類方法中的逆矩陣往往虧秩,導致最小二乘估計存在較大的誤差。對于類似雙ρ法的初始軌道確定算法,初始軌道計算結果往往對觀測數據誤差比較敏感,存在較大誤差,且誤差不易估計。因此,地基初軌確定技術在處理天基短弧光學觀測時存在困難。
2005年,Milani等人提出了建立可行域計算近地天體初始軌道的方法。該方法根據近地小行星的軌道特點,基于短弧光學觀測數據,計算觀測時刻斜距和斜距變率的可行域,利用德勞內三角網格剖分方法在可行域內搜索小行星初始軌道的最優解。該方法隨后被推廣到空間碎片,為近地空間物體短弧測角觀測數據的初軌確定技術提供了一套新方法。李駿等人將該方法推廣應用到同步軌道空間碎片的天基短弧光學觀測數據的初軌確定中,中科院紫金山天文臺、武漢大學的學者利用類似的約束方法開展了天基超短弧初軌確定相關研究。
天基光學短弧數據計算低軌空間碎片初軌的困難在于解的不穩定性。觀測資料弧段過短,約束不足,受到誤差的影響,最優解對應的軌道與真實軌道存在較大的差距。因此,觀測弧段約束不足時,可以通過設定更多維的合理約束條件,使得初軌確定能逼近真值。此外,在實際工作中,即使不能夠給出確定的解,給出合理的誤差估計同樣有意義。本文針對低軌天基光學觀測平臺對低軌空間碎片的短弧監測數據,提出了一種計算初始軌道、評估初始軌道誤差的方法,并利用遙感衛星視頻星的實測數據驗證算法的可行性。
1 原理方法
1.1 可行域方法

=+
(1)

(2)
(3)
(4)

針對低軌空間碎片軌道特點,對初始軌道做以下4項約束:
(1) 空間碎片的軌道為橢圓軌道;
(2) 半長軸大于地球半徑,小于倍地球半徑,可以人為調整,=10可以覆蓋同步軌道空間碎片;
(3) 目標軌道近地點大于地球半徑;
(4) 目標與平臺之間的距離約束,根據平臺的探測能力和目標尺寸的估計,可以估算天基光學觀測平臺的可觀測的最近距離和最遠距離范圍。


(5)
將該區域離散,離散后每個節點的坐標對應一組斜距和斜距變率,與初始參數一起可計算出一條假設的軌道。因此,離散區域中的每個節點對應了一條假設軌道,整個區域AR則對應了一組假設軌道。利用觀測數據對這組假設軌道進行進一步的驗證,剔除其中偏差過大的假設軌道,找到偏差最小的軌道作為初始軌道。具體做法如下:設計目標函數,表示初始軌道預報值與實際觀測值之差,并使目標函數小于設定的閾值。由于天基觀測的弧段通常非常短(軌道的預報期僅為分鐘甚至秒量級),可選擇合適的軌道預報方法快速預報,此時由預報方法引起的誤差可以忽略,預報誤差主要由觀測數據的誤差和初始誤差共同確定,因此上述閾值的設定主要由觀測數據的誤差和初始參數的誤差共同確定。保留閾值范圍內的節點,可使用統計方法估計得到初始軌道誤差。至于如何搜索區域AR內的可行軌道,我們采用了網格搜索的方式(祥見第24節)。
當弧段非常短時,由觀測數據形成的約束不足,難以估計最優的初始軌道,因此需要增加額外的約束。圓軌道假設算法假設軌道偏心率為零,使獨立的軌道參數從6個降為4個,因此僅使用兩個測角資料,就能計算出初始軌道。對于偏心率不為0的軌道,圓軌道假設算法的初軌定軌結果與真實軌道存在偏差。當目標軌道為近圓軌道時,利用圓軌道假設初軌計算方法給出的初值作為約束條件進行初始軌道的搜索,能夠有效降低計算結果的不穩定性。
1.2 圓軌道假設法
圓假設算法假設軌道偏心率為零,使獨立的軌道參數從6個降為4個,因此僅使用兩個測角資料(,,=1,2),就能計算出初始軌道。由于近地空間目標的軌道大多是近圓軌道,使用圓軌道假設法,便于估計軌道的半長軸。該算法的基本思想是圓軌道在任意時刻的角速度大小為常數。為了方便讀者理解,這里根據文獻[20],簡述圓軌道假設初始軌道方法的主要計算步驟,并簡述其在天基觀測數據中的應用。
設(=1,2)為被測目標的位置矢量,天基光學觀測平臺的位置矢量為site,有
(6)
望遠鏡與被測目標軌道之間的幾何關系如圖1所示。
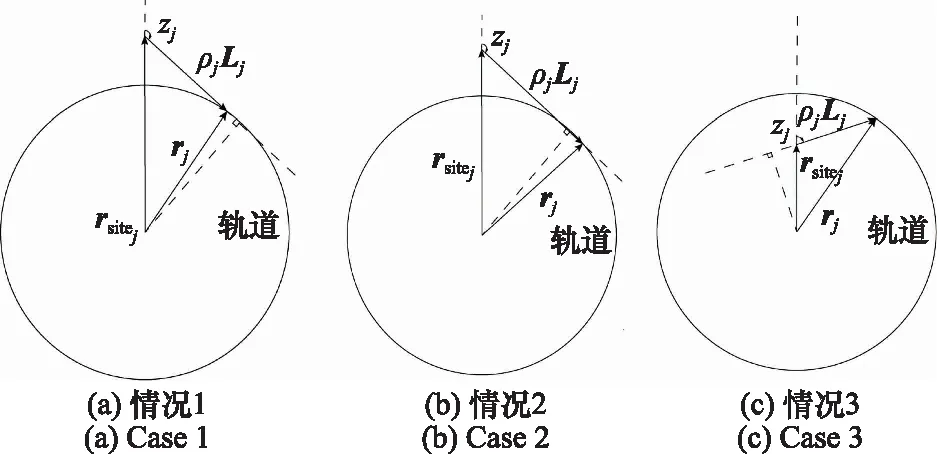
圖1 天基望遠鏡觀測示意圖Fig.1 Diagrammatic sketch of space based telescope observation
圖1中,為天基光學觀測平臺的位置矢量與觀測單位矢量之間的夾角,圓圈代表被測目標軌道。望遠鏡與被測目標軌道不一定在一個軌道面內,為了便于表示望遠鏡與目標軌道幾何關系,將兩者畫在一個平面內。實際目標軌道的軌道面,可以圍繞目標的位置矢量所在的軸轉動。根據對稱性,轉動后望遠鏡與目標位置之間的轉換關系不變。當測站在地面時,只存在圖1(c)所示的情況。但對于天基觀測而言,圖1(a)~圖1(c)所示的幾何關系均會出現。對于天基低軌衛星,地氣光規避角為5°時,軌道高度600 km,目標軌道高度大于240 km,當望遠鏡與目標之間的距離小于2 200 km時,會出現圖1(a)所示的幾何關系。對于圓軌道來說,目標的地心距等于軌道半長軸。因此,軌道半長軸與斜距之間有如下關系:

(7a)
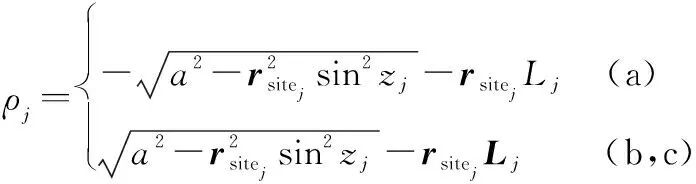
(7b)
式(7)的公式標號(a)、(b)、(c)分別對應了圖1中的(a)(b)(c) 3種情況。如果知道了圓軌道的半長徑,將式(7)代入式(6)可得到被測目標的位置矢量,每個有兩種可能,則理論上存在4種可能的組合。每個組合下理論上可以計算得到一條軌道結果,則理論上可能計算得到4條軌道。迭代計算初始軌道時,這4種組合往往不能夠同時收斂。因此,實際計算得到的初始軌道結果的數量應小于等于4。
通常采用下述方法確定目標圓軌道的半長徑:由兩個測角資料確定的平均運動為
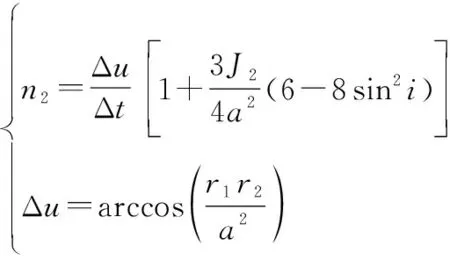
(8)
式中:Δ為位置矢量,之間的夾角;Δ為空間物體從至的時間間隔;取值為1802 6×10,式(8)包含平均運動的長期項,當觀測弧段較短,此項可以忽略。式(8)簡化為
(9)
由半長軸軌道半長軸,地球引力常數,碎片的平均運動為
(10)

(11)
綜上,圓軌道假設法的求解過程如下:首先假定一定的軌道半長徑,將式(7)代入式(6)給出、,然后利用式(9)和(10)求解軌道平均運動以及,利用式(11)計算的改進值,并重復上述過程,直到小于10e-5為止。
1.3 圓軌道約束法的方法流程
當監測弧段非常短時,基于可行域方法得到的初始軌道通常與真實值相差過大。為了得到較為合理的軌道結果,進行可行域的二維搜索時,進一步增加用圓軌道假設得到的軌道半長軸為約束條件。可行域結合圓軌道約束初始軌道確定方法的流程如圖2所示。詳細的算法流程見第2節。
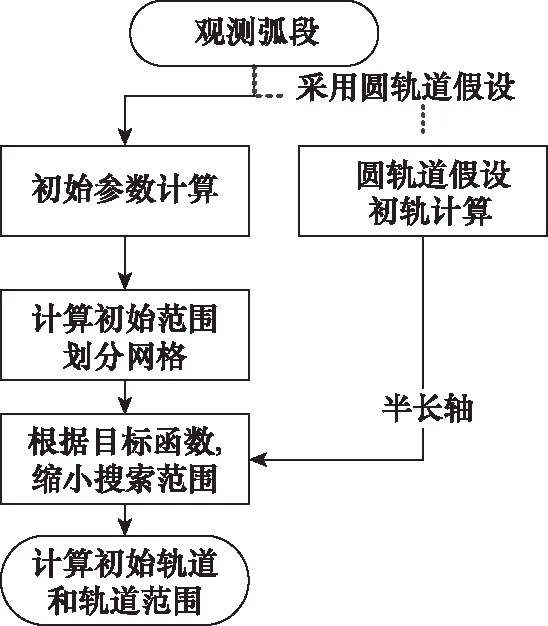
圖2 圓軌道約束的初軌確定方法的流程Fig.2 Flow of the initial orbit determination algorithm for circular orbit constraints
2 詳細流程和算法實現
2.1 算例說明
下面將基于一實際算例闡明本項工作具體的方法流程,該算例基本信息如下所列,詳細信息參見第4節算例和實驗。
(1) 天基光學觀測平臺軌道:530 km高度太陽同步軌道,軌道傾角97.4°。
(2) 被測目標軌道:630 km太陽同步軌道。
滑模施工是較先進的高墩施工技術,具有施工速度快、節約資源、安全高效等特點,滑模系統由工作平臺、提升設備、工作吊籃等構成,滑模施工時,將模板掛在工作平臺圍圈上,滑模板最下層混凝土結構截面周邊組合拼裝模板,滑模板在提升設備帶動下,將滑動模板的套槽沿已澆筑成型的混凝土結構截面向上滑升后施工。滑模板施工垂直高度控制較難。
(3) 實際探測距離:1 683 km。
(4) 觀測弧段約6 min,由4個超短弧組成,時間范圍分別為0~4 s、120~124 s、240~244 s、360~363 s,共計53個觀測點。
2.2 初始參數及誤差估計
首先需確定初始參數,即赤經、赤緯以及它們的變率。若直接使用觀測數據中的數值,初值會包含數據測量誤差。因此,需要先將觀測數據做平滑處理,以去除隨機誤差的值作為初始參數。天基光學觀測數據隨時間接近線性變化,采用二階多項式模型進行曲線擬合比較合適。由于觀測數據稀疏,采用檢驗方法計算初始參數的置信區間,置信水平為95%。
(12)
式中:代表赤經或者赤緯觀測量;=cov([])和′=cov([])為二階多項式模型進行參數估計的協方差;=[1]和′=[12]為設計矩陣。
2.3 斜距和斜距范圍計算
根據約束條件1(地球衛星的軌道為橢圓軌道),約束條件2(軌道半長軸大于地球半徑,且小于倍地球半徑),以及約束條件4,可以直接計算斜距和斜距范圍。
根據軌道機械能的定義,以及地球衛星軌道半長軸大于地球半徑,且小于倍地球半徑,且當=10時,有

(13)
根據橢圓軌道的機械能小于0,有
<0
(14)
由于地球半徑大于0,顯然式(13)實際包含了式(14)的范圍。此外,天基平臺和被測目標之間的距離太近,相對運動過快,不利于天基平臺觀測目標。因此,將探測距離限制在50 km以上。綜上,得到如圖3所示的初始斜率和斜率范圍。
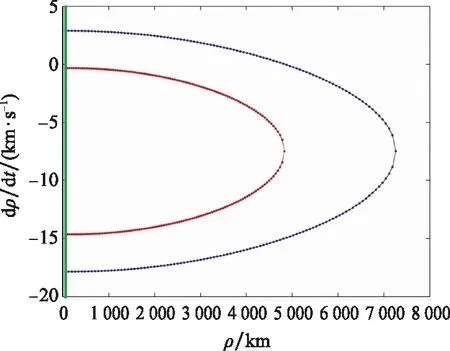
圖3 由約束1、2和4生成的初始范圍Fig.3 Initial admissible region of constrained by Conditions 1,2, and 4
藍色曲線左側代表軌道半長軸小于倍地球半徑,紅色曲線右側代表軌道半長軸大于地球半徑。綠色曲線右側代表斜距大于50 km。紅色曲線、藍色曲線和綠色曲線圍成的范圍,即為斜距和斜距變率的初始范圍。近地點高度大于0的約束條件不易簡單計算,可以將初始范圍離散后再逐點篩選,得到如圖4所示的兩個分離的區域。
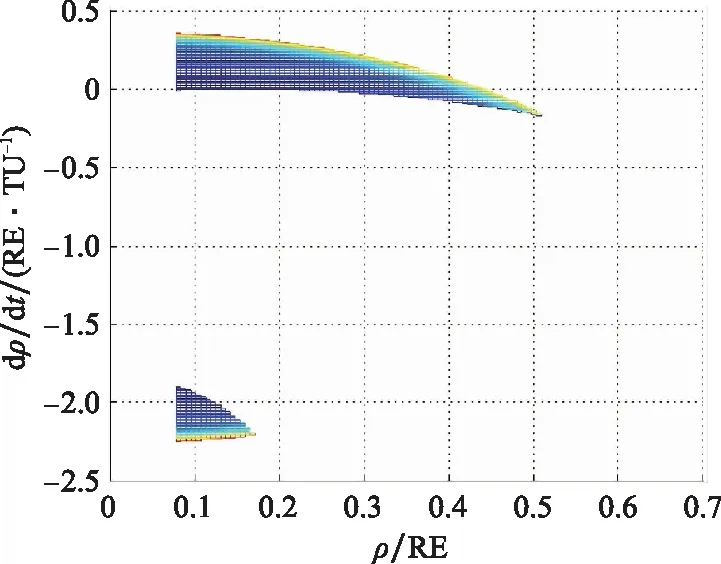
圖4 由約束1至約束4生成的初始范圍Fig.4 Initial admissible region of constrained by Conditions 1 to 4
2.4 建立剖分網格
與文獻[4]提出的方法類似,利用三角網格對初始范圍進行離散。但需要注意的是,對于低軌空間碎片,約束條件構成的形狀存在凹陷,需要先指定邊界,網格劃分完成后,僅保留邊界及其內部的網格,再進行細分。初始網格如圖5所示。
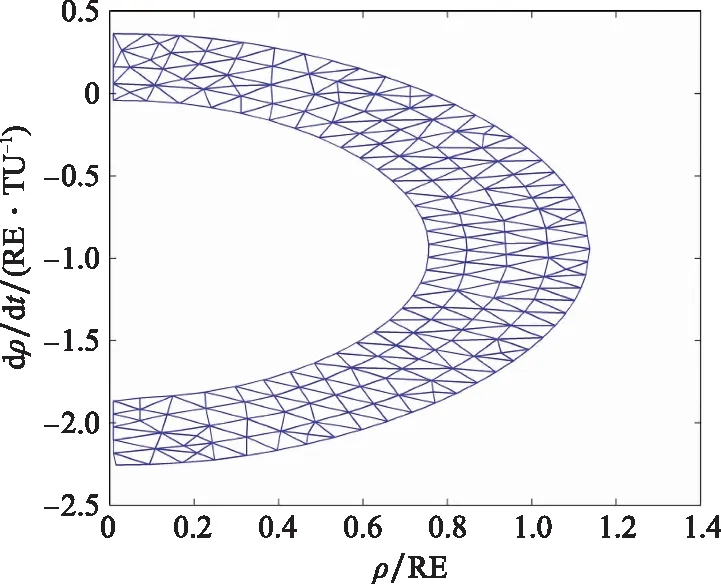
圖5 初始范圍的三角網格劃分Fig.5 Triangular mesh division of the initial region
進一步根據約束條件2近地點大于地球半球,逐一篩選網格的節點,篩選后形成了兩個分離的區域組成,節點如圖6所示。將離散點根據距離相近的原則進行聚類分組,分離不同區域的節點。對區域內的每個節點計算目標函數,目標函數可以直接采用預報軌道的計算值和觀測數據之間的偏差:
=∑RMS
(15)
也可認為根據目標軌道的特點適當修改目標函數:

(16)
式中:為軌道半長軸的參考量;Δ為軌道半長軸的搜索半徑。
譬如本文的工作,對于4 s的超短弧觀測數據,我們采用了如式(16)形式的目標函數,對于分鐘量級以上的短弧觀測弧段,采用如式(15)形式的目標函數。
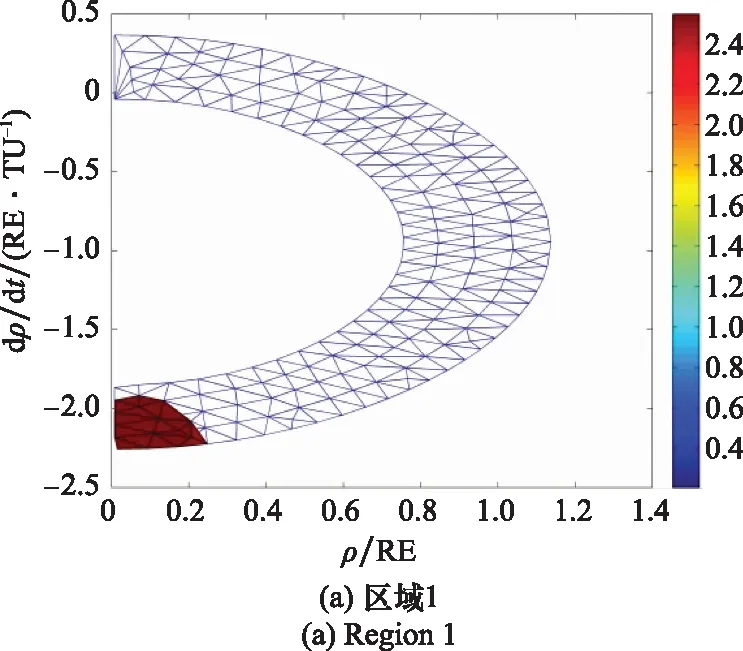
圖6中,顏色偏藍代表目標函數值小,偏紅則代表目標函數值大。由圖6可見,區域1與天基平臺接近,目標函數相對較大;區域2分布范圍較大,但目標函數相對較小。對區域2做網格細分。
2.5 迭代細分網格
同時進行網格細分和區域收縮。區域收縮是為了適度縮小范圍。通過逐步去掉值過大的區域,找到合適的假設軌道集合。為了對搜索區域盡可能充分采樣,需要根據篩選區域的大小對網格逐步細分。區域收縮通過剔除一定比例的目標函數相比閾值偏大的節點來實現,每次迭代剔除比例約為90%。網格細分時,先對篩選出的區域求邊界,在邊界等距離采點,再生成均勻的內部節點。通過控制邊界節點間的距離,控制內部節點的密度。為了防止采樣過于密集或者過于稀疏,逐步縮小邊界節點距離,每次迭代節點間距收縮比例為15,當全部節點均落在閾值內時,停止區域收縮,節點間距收縮比例增加,尋找最優解,同時完成區域內均勻采樣。本項工作采用的網格細分方法與文獻[4]所述方法的不同之處有兩點:一是本項工作采用歸一化單位,斜距與斜距變率的取值范圍基本一致,采樣中不需要再對測距量取對數;二是文獻[4]利用三角網格的重心進行加密,在某些算例中會出現網格劃分不均勻的情況,本文的網格加密方法為從三角網格最長的邊取中間點,直到網格內任意兩點間距離滿足閾值,實現網格均勻采樣,同時不破壞三角網格的邊界。
2.6 計算初始軌道和軌道誤差
當網格內的每個節點的目標函數值均在閾值內時,停止區域收縮,提高節點間距細分比例,在區域內加密均勻采樣,并計算每個節點的目標函數和軌道參數。目標函數值最小的離散節點即為所求解的初始軌道。統計值小于閾值的區域內每個節點的初始軌道參數,即可得到初始軌道的協方差:

(17)
觀測數據可以表示為初始參數,待估計的斜距和斜距變率,以及天基光學觀測平臺的位置矢量和速度矢量的函數,其表達式為
=(,,,)+
(18)
式中:為觀測誤差,在優化目標函數過程中、和都屬于固定參數。事后處理時,天基光學觀測平臺的位置速度的預報誤差可以忽略。的不確定性主要來源于測量誤差,包括系統差和隨機誤差。考慮的誤差時,系統偏差是未知的,同樣當做隨機誤差來處理,用表示,的協方差矩陣為。觀測值與理論值之間的誤差可表示為

(19)


(20)
根據目標函數篩選網格范圍時,由產生的預報誤差直接折算到觀測數據和理論值之間的偏差中,使真值處的目標函數增大,最小值與真值之間出現偏離。為了將真值包含進初始軌道的誤差中,按下式計算的閾值:

(21)
初始軌道的誤差受初始參數和斜距、斜距變率的影響。初始參數中赤經、赤緯及其變率相對獨立,僅保留對角線元素即可。由離散節點統計得到的初始軌道協方差,未包含初始參數引起的協方差。

(22)
初始軌道的協方差由式(22)給出,其中為開普勒根數對初始軌道參數的偏微分矩陣:
cov()=
(23)
具體表達式可參考文獻[25-26]。
為了降低軌道預報誤差對目標函數的影響,對低軌空間碎片需考慮項攝動。如果僅采用二體軌道預報模型,預報引起的誤差遠超過測量誤差。
3 算例和實驗
3.1 實驗背景
2019年2月,碎片中心和長光衛星聯合開展天基空間碎片危險交會監測,拍攝對象為發生近距離交會的空間物體,利用天基望遠鏡觀測即將發生危險交會的空間物體軌道,得到軌道信息對危險交會進行復核。
3.2 實驗目標
(1) 估計天基望遠鏡的極限探測星等,并選擇合適尺寸的被測目標。
(2) 利用天基望遠鏡,拍攝空間物體的點像圖像,調試至圖像背景包含可用于天文定位的背景恒星,弧段長度滿足定初軌和精密定軌的要求。
(3) 利用高精度軌道數據,修正數據誤差,標定測角精度。
(4) 利用空間物體的天基監測數據實現,天文定位、初始軌道確定,評估定軌精度。
3.3 天基望遠鏡設備參數和觀測模式
天基光學觀測平臺采用長光衛星公司的對地高分辨率高機動性遙感成像衛星吉林一號視頻星,編號為43 160,軌道高度為530 km。吉林一號視頻星攜帶相機為雙相機結構,鏡頭口徑為3.2 cm,每個相機視場約為0.5°×1.2°,CCD像素為1 200×5 000,焦距3 200 mm,角分辨率為0.35″,最大成像距離為2 000 km,最大相對角速度為4°/s,最大跟蹤角速度為1°/s,最大太陽規避角為90°。平臺定位精度優于10 m。曝光時間120 ms時,極限探測性能為8等。對于低軌空間碎片的拍攝,最長曝光時間為500 ms。
本次實驗涉及兩種觀測模式。① 慣性空間定向拍攝——即視頻星相機的指向相對J2000坐標系靜止,等待目標經過視頻焦面的拍攝方式。目標在視場中會近似勻速直線穿過望遠鏡視場,背景恒星呈點像,目標存在拖影,適用于相對角速度較快的空間物體。獲取的觀測弧段長度較短,一個弧段僅有幾秒鐘。② 慣性空間固定多點組合拍攝——即在目標相對視頻星可見的幾分鐘時間段內,安排多個慣性空間定向拍攝的組合拍攝。每個定向拍攝任務結束后立即調整姿態對準下一次拍攝的位置,每一次定向拍攝任務中視頻星指向在J2000坐標系下保持不動。相比直接跟蹤目標的拍攝模式,該模式既可以充分利用交會窗口,增加了觀測弧段長度,又能夠最大程度保留背景恒星。慣性空間定向拍攝模式獲取的一組圖像,疊加后如圖7所示。
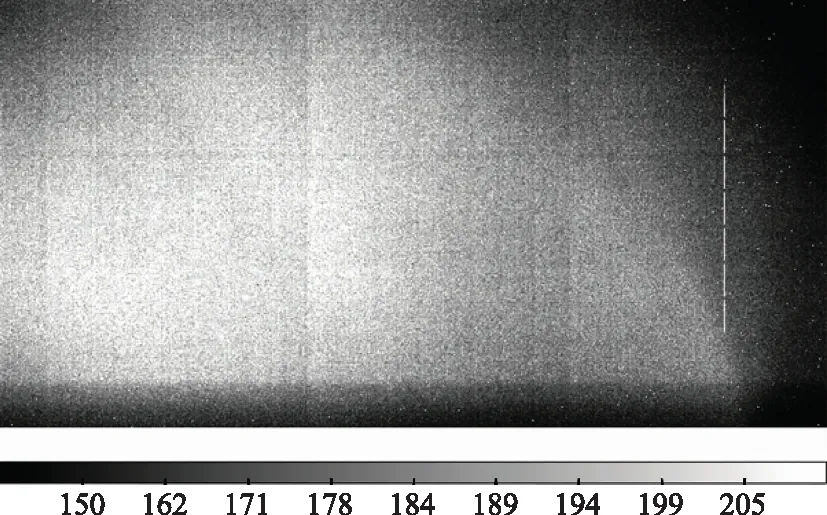
圖7 慣性空間定向拍攝模式獲取的疊加圖像Fig.7 Multi-frame superimposed image with inertial fixed observation mode
拍攝目標和數據處理約束:探測距離不超過3 000 km,太陽規避角小于80°,被測目標處于光照區域。該星平時業務是對地推掃,為了避免影響日常業務沒有針對性調焦,因此點擴散較大,理論達到5×5至10×10個像素,且能量呈周邊漸變分布;周邊變化梯度大的都是噪聲。為了降低卷簾快門對圖像的扭曲,使目標垂直穿越視場,避免橫向位移。
3.4 實驗步驟和結果
根據實驗目標,天基監測實驗步驟如圖8所示。第1步,選擇合適的合作目標,獲取高精度軌道數據作為校對軌道數據;第2步,獲取能夠進行天文定位的觀測圖像;第3步,進行圖像處理,提取觀測弧段;第4步,標定觀測數據誤差,修正改進數據處理步驟,給出監測數據精度。第5步,獲取能夠用于軌道確定的監測弧段。第6步,計算初始軌道及誤差驗證初始軌道誤差。
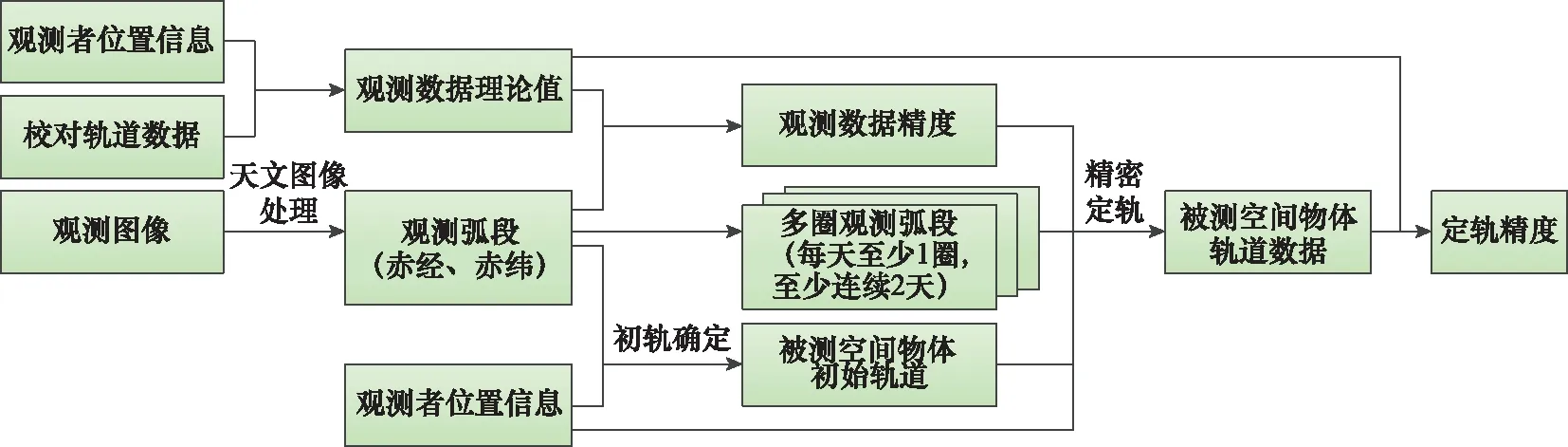
圖8 低軌天基空間物體監測試驗方案Fig.8 Experimental scheme for monitoring low-orbit space-based space objects
3.4.1 空間碎片天基監測圖像獲取
從2019年3月至8月,共計獲得空間物體監測圖像數據353幅。其中,可用于天文定位的圖像297幅,可標定精度圖像249幅,可用于定初始軌和精密定軌的圖像數據249幅。可用于精密定軌的監測弧段共計3組,拍攝日期分別為2019年7月18日、2019年7月28日和2019年8月10日。拍攝模式均為慣性空間固定多點組合成像。
3.4.2 天文定位
對每幅圖像進行天文定位,提取空間物體的赤經、赤緯信息。參考星表選用Gaia DR2,星等范圍為0~13等,星表的改正項包括自行和周年光行差。利用拍攝的恒星星象對極限探測進行評估,平均每幅圖能夠提取出恒星數量40顆左右。結果表明,在450 ms曝光條件下,極限探測星等為11等。利用恒星對天文定位精度進行評估,恒星的天文定位精度優于0.3″。圖9為其中一幅圖的天文定位精度。
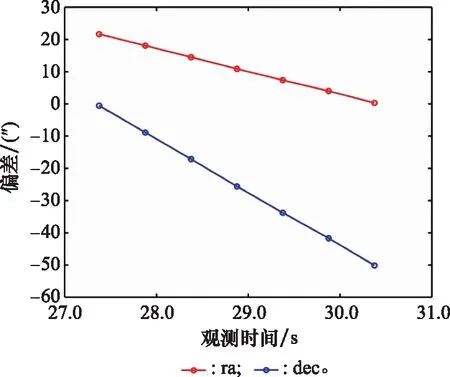
圖9 卷簾快門修正前的測角精度Fig.9 Angle measurement accuracy before rolling shutter correction
3.4.3 時間和平臺位置修正
(1) 時間修正
中心對降噪后的圖像數據進一步降噪,能夠正確識別目標、背景恒星和噪聲。鑒于吉林一號視頻星使用卷簾快門,需要對探測時間進行修正,探測時間修正量為
Δ=×
(24)
式中:為空間物體觀測質心的縱向位置,即空間物體觀測質心所在圖像中的行數;為掃描每行數據的時間。按照10 ms每行的推掃速度修正后,誤差的擴散現象得到很好修正,如圖10所示。修正后的時間精度優于0.1 ms。

圖10 卷簾快門修正后的測角精度Fig.10 Angle measurement accuracy after rolling shutter correction
(2) 光行差修正
對星表進行周年光行差修正,觀測數據的測角偏差提高到10″量級,如圖11所示。
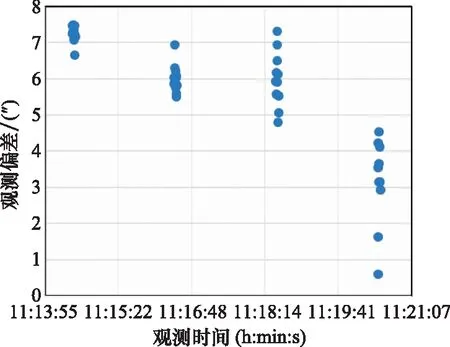
圖11 周年光行差修正后的測角精度Fig.11 Angle measurement accuracy after aberration correction
(3) 天基光學觀測平臺位置修正
望遠鏡軌道星歷時間與探測時間差介于0~1 000 ms,根據望遠鏡軌道的精密星歷,采用二體軌道預報模型,預報至指定時刻,引起的位置誤差小于1 m。
3.4.4 計算初始軌道定軌精度
使用組合觀測獲得的時間長度約6 min的探測弧段進行初軌確定,組合弧段包含4組短弧段。取第一組短弧段的觀測數據擬合計算初始參數,計算結果如表1所示。

表1 初始參數估計結果
初始參數的估計值均在真值之外,說明初始參數存在系統偏差。以初始參數的估計值為輸入,應用第2.2節中描述的約束條件,在斜距和斜距變率二維空間中進行搜索。測量誤差按10″,測量角度變率的誤差為0.2″,根據此條件計算目標函數的篩選閾值,經過多次迭代,范圍逐漸收縮至真值附近。圖12中藍色線條代表邊界約束下的初始網格,紅色點代表每次篩選后保留的節點。
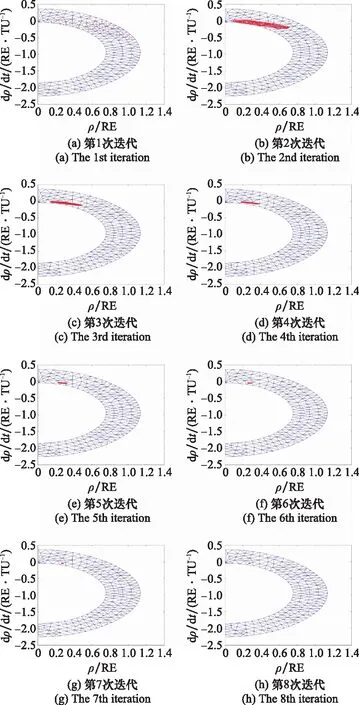
圖12 逐步縮小搜索范圍Fig.12 Gradually narrowed admissible region
圖13中紅色點代表搜索結果,線條描出的區域代表斜距和斜距變率的估計范圍。顏色偏藍代表目標函數值偏小,偏紅則代表目標函數值偏大。斜距和斜距變率的可行范圍構成一條狹長的區域。初始軌道和誤差結果見表2。
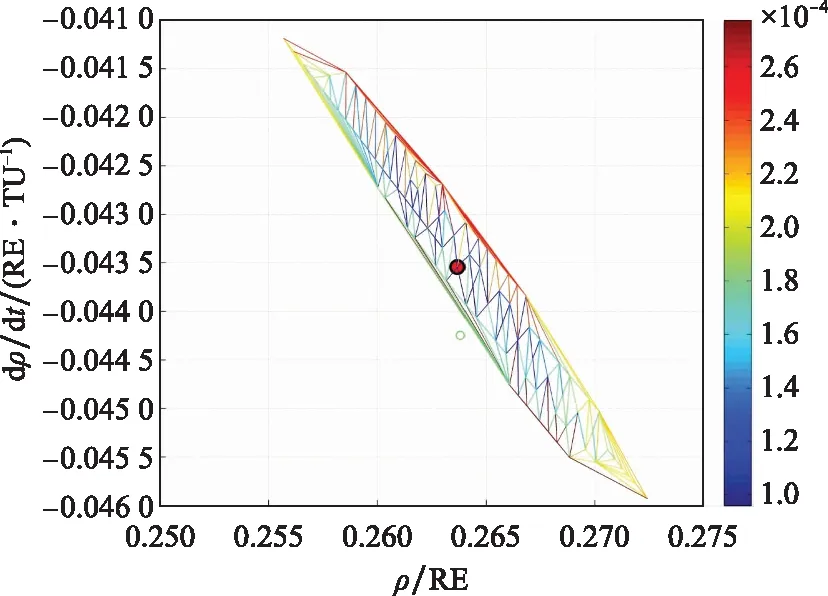
圖約束域的搜索結果Fig.13 Assemble region search results of

表2 363 s弧段可行域方法的初始軌道結果
縮短觀測數據時間后,可行域方法的計算結果如表3所示,計算結果的不確定性顯著增加。半長軸的標準差從10 km增加至50 km。結果如表4所示。

表3 244 s弧段可行域方法的初始軌道結果

表4 124 s弧段可行域方法的初始軌道結果
利用圓軌道假設法,得到的初始軌道計算結果,表明半長軸誤差小于10 km,詳細結果如表5所示。

表5 363 s弧段圓軌道假設方法的初始軌道結果
對于弧段長度僅4 s的超短弧觀測數據,普通的可行域法難以給出合理最優解。單純使用圓軌道假設法得到的結果,如表6所示。針對近圓軌道,利用圓軌道假設計算得到的半長軸為約束條件,在附近利用公式(14)計算目標函數,計算結果如表7所示。半長軸偏差約為31 km,軌道傾角偏差為0.006°,升交點赤經偏差為0.058°。對于近圓軌道,用近地點角和平近點角之和描述碎片在軌道中的位置,偏差為0.085°。

表6 4 s弧段圓軌道假設方法的初始軌道結果
對比表6和表7的結果,可行域+圓軌道假設方法對除半長軸之外的軌道參數,均優于單純使用圓軌道假設法得到的結果。由于可行域中目標函數參考了圓軌道的半長軸,目標函數的閾值不易估計。因此,采用結合算法后,初始軌道的誤差難以直接得到。

表7 4 s弧段可行域+圓軌道假設方法的初始軌道結果
3.5 實驗結果
成功獲取米級空間物體多圈測軌數據,初步驗證了開展低軌天基探測的可行性。根據探測數據評估望遠鏡的探測能力和探測精度,結果表明極限探測星等為11星等,被測目標尺寸約為米級。獲取了3個目標的天基觀測數據,監測弧段時間長度約6 min,滿足初始軌道確定和觀測精度驗證。利用高精度軌道數據標定天基觀測的測角精度,結果表明測角精度約為10″,還需進一步修正。利用天基觀測數據確定空間物體軌道,驗證了初始軌道計算結果的有效性。對于分鐘量級的監測數據,在不做先驗圓軌道約束的情況下,初始軌道半長軸精度在十公里量級,但存在系統偏差。對于4 s超短弧觀測數據,結合圓軌道約束,半長軸偏差約30 km。
4 結束語
本文介紹了利用二維網格估計初始軌道方法,分析了影響初始軌道誤差的因素,提出了估計初始軌道誤差的方法,結合圓軌道假設算法提出了針對圓軌道的初始軌道估計的方法。利用天基實測觀測數據對低軌初始軌道及誤差估計方法進行了驗證。開展了天基空間碎片觀測實驗,初步實現了天基低軌空間碎片監測數據處理,分析了卷簾快門、望遠鏡位置、光行差等因素對天基監測數據誤差的影響。
初軌確定方面,初始軌道誤差估計與實際偏差之間還存在差異,主要原因是赤經、赤緯及其變率等初始參數的估計值與實際值存在系統偏差。隨機誤差能夠估計,但系統誤差難以消除,需要進一步分析影響初始軌道誤差的因素,改進數據處理模型。精密定軌方面,實驗獲取的觀測弧段時間較為集中,缺少觀測弧段分布稀疏數據的定軌精度分析。
需要進一步分析引起測量誤差的因素,影響監測任務執行率的因素,分析大氣、雜散光、光學系統設計等因素對空間物體成像的影響。