一種全自動蛋皮機的設計研究
2022-08-18 08:12:26潘紅恩徐紅金黃旭宸錢鵬
機械制造與自動化 2022年4期
潘紅恩,徐紅金,黃旭宸,錢鵬
(南京信息職業(yè)技術學院,江蘇 南京 210023)
0 引言
中國人的餐桌上通常不缺各式各樣豐盛的美食,特別是雞蛋餅及其包裹成的風味小吃,讓人愛不釋手。一般人工制作蛋皮,生產(chǎn)效率低,規(guī)模不大,衛(wèi)生也難以保證。
平面轉(zhuǎn)盤式蛋皮機體積比較大,難推廣;自調(diào)平蛋皮機蛋皮成型棍是豎直的,蛋液不容易粘牢,容易脫落[1]。
本文設計的是一種平面轉(zhuǎn)盤式的蛋皮機,體積小、使用簡單方便。文中主要介紹項目整體方案,闡述全自動蛋皮機設計的三維建模及運動技術方案,最后通過運動仿真驗證蛋皮機的功能。
1 蛋皮機整體方案設計
項目設計方案如圖1所示,所研究的是一種能自動上下料、實用新型的全自動蛋皮機。設計方案主要包括三大部件:動力源裝置、蛋皮機主體、機械手抓取裝置。動力源部分為蛋皮機的運轉(zhuǎn)提供動力,可以選擇一個小型的動力泵提供能源。執(zhí)行部分是蛋皮機的主體部分,由傳動鏈、送料裝置、驅(qū)動機構(gòu)、轉(zhuǎn)子、機架和電餅鐺等組成。所設計的關節(jié)式機械手抓取裝置能夠?qū)崿F(xiàn)吸取、安放、搬運蛋餅等功能。三大部件通過各機械部件的設計、三維建模、裝配及運動仿真,并完成整體調(diào)試運動仿真,達到全自動蛋皮機設計要求。
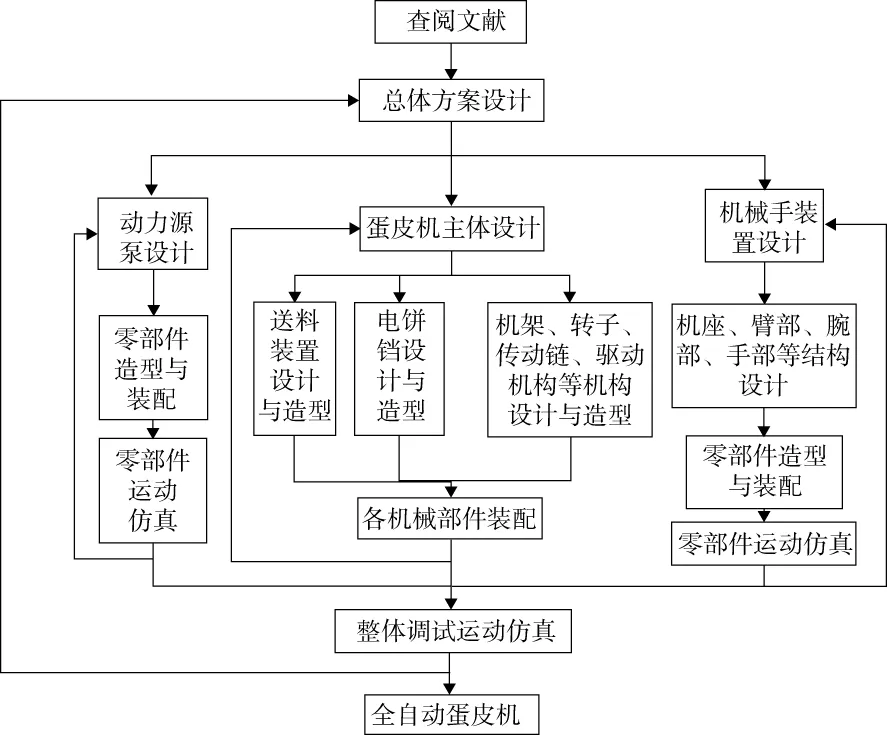
圖1 整體設計方案
2 蛋皮機的設計、三維建模及裝配
2.1 蛋皮機主體設計及三維建模
如圖2所示,蛋皮機主要包括機架、轉(zhuǎn)子、傳動鏈、送料裝置、電餅鐺、驅(qū)動機構(gòu)和墊臺。項目實施中采用6個電餅鐺18個工位的方案,設計原理如下。
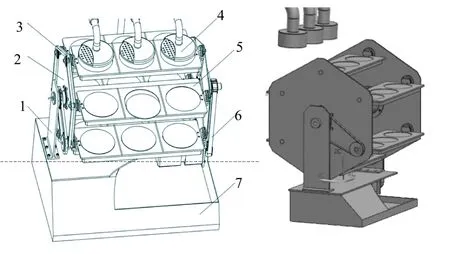
1—機架;2—轉(zhuǎn)子;3—傳動鏈;4—送料裝置;5—電餅鐺;6—驅(qū)動機構(gòu);7—墊臺。
轉(zhuǎn)子主要由左板、空心轉(zhuǎn)軸和右板組成。左板和右板由空心轉(zhuǎn)軸的兩端垂直連接。轉(zhuǎn)子安放在機架上,轉(zhuǎn)子上裝有電餅鐺,電餅鐺之間由傳動鏈連接。機架上設計有驅(qū)動機構(gòu),驅(qū)動傳動鏈動作。
送料裝置主要由定量主輸送管、控制箱、輸送泵、料桶、至少一根分輸送管、與分輸送管數(shù)量相等的噴頭上殼、上料電機和與噴頭上殼數(shù)量相等的均料網(wǎng)等組成。送料裝置設置在機架外側(cè),把蛋液輸入電餅鐺內(nèi)的每個工位。
機架包括左立板、底板和右立板。底板的兩端垂直安裝有左、右立板,左右立板對稱設置;左固定套垂直于板面設計在左立板的上部板面內(nèi)側(cè)面上,左固定套與左立板相通;固定鏈輪設置在左固定套上,固定鏈輪靠近左立板的板面處,并設滾動件;在左固定套內(nèi)固定安裝絕緣套且絕緣套伸出左固定套,在伸出左固定套的絕緣套外表面上裝有第一和第二耐磨銅套,且由導線連接。左右固定套同軸。在右固定套的孔內(nèi)通過軸承支承轉(zhuǎn)軸。
驅(qū)動機構(gòu)設計有第一帶輪、第二帶輪、電機和同步帶。電機固定在底板的背面,位于右立板的下方,電機軸上裝有第一帶輪,通過同步帶帶動第二帶輪,第二帶輪安裝在右立板端部。
電餅鐺主要由左耳、右耳、加熱盤、電餅鐺右電刷盤、電加熱管、電餅鐺左電刷盤、保溫托、右軸、左軸和同步鏈輪組成。在加熱盤的表面上有內(nèi)凹鍋面,在加熱盤的下方設有電加熱管,電加熱管位于保溫托內(nèi),保溫托連接加熱盤,加熱盤的左右兩端伸出形成加熱管左右端;加熱盤的左右兩端設有左右耳,左軸垂直于左耳的外側(cè)面,在左軸上有絕緣套,電餅鐺左電刷盤安裝在左軸的絕緣套上,電餅鐺左電刷盤與加熱管左端由電連接;左軸的端部裝有同步鏈輪,同步鏈輪位于左板的外側(cè);左板上的固定軸套與左軸的軸套孔相配;右軸垂直于右耳的外側(cè)面,在右軸上裝有絕緣套,右軸的絕緣套上裝有電餅鐺右電刷盤,加熱管右端與電餅鐺右電刷盤由電連接,右板上的固定軸套與右軸的軸套孔相配。
傳動鏈設計有第一、第二鏈條和從動鏈輪。固定鏈輪與電餅鐺左軸上相同齒數(shù)的從動鏈輪由第二鏈條連接在機架上,保持電餅鐺鍋面的平動;第一鏈條連接所有電餅鐺左軸上的同步鏈輪,這樣轉(zhuǎn)子上的所有電餅鐺都保持平動[2]。
2.2 蛋皮機主要部件的有限元分析
固定鏈輪是蛋皮機中不可缺少的傳動部件,它的強度直接影響到蛋皮機的安全可靠性,故有必要對其進行有效靜力學分析。將建立好的固定鏈輪模型導入ANSYS Mechanical中,通過加載約束(在固定鏈輪的兩側(cè)施加一個位移的約束),應力分析(鏈輪的接觸面施加壓力),固定鏈輪的位移圖和總應力如圖3所示(紅色表示位移大,藍色最小)。固定鏈輪安全可靠(本刊為黑白印刷,若有疑問可咨詢作者)。
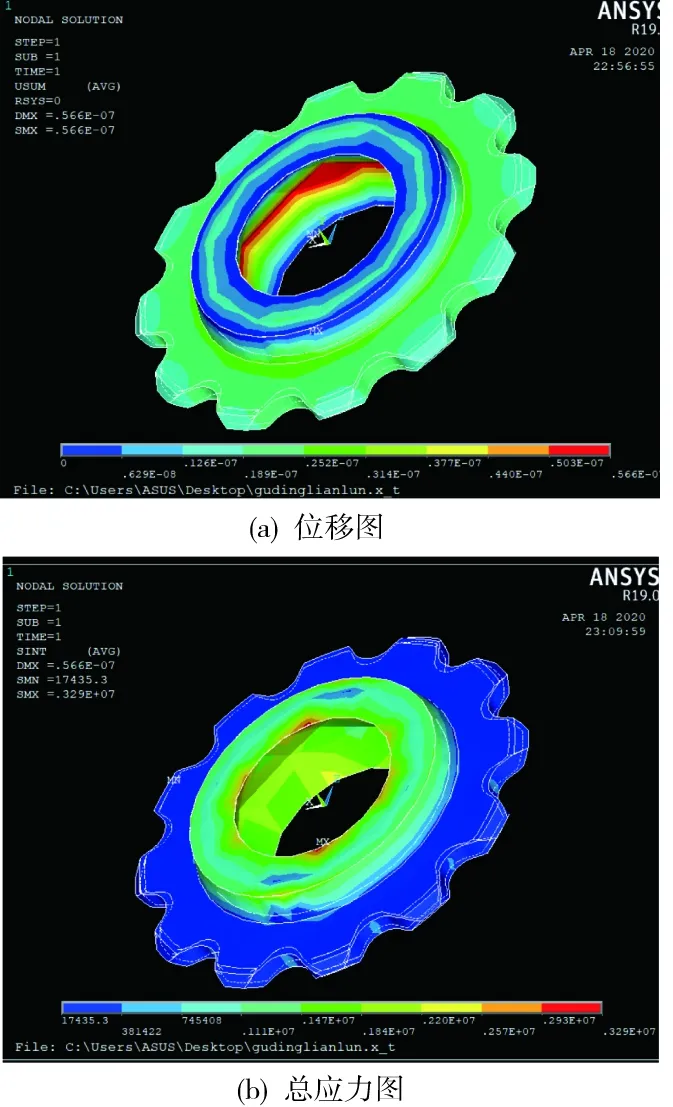
圖3 固定鏈輪位移圖和總應力圖
2.3 抓取機械手控制系統(tǒng)
抓取機械手的執(zhí)行機構(gòu)由底座、立柱、電機、大臂、小臂、手腕、吸盤、氣缸和活塞等組成。機械手的驅(qū)動系統(tǒng)由氣動裝置來驅(qū)動,主要是依靠機械手各部位的活塞通過氣壓來進行運動[3]。采用可編程序控制器(PLC)設計機械手的控制系統(tǒng)。機械手吸取和擺放蛋皮的動作過程如圖4所示。機械手手臂上升至上限位,底盤旋轉(zhuǎn)使吸盤處于蛋皮的正上方,這時蛋皮機暫停,機械手抓取吸盤移動到蛋皮上,產(chǎn)生吸力,機械手把蛋皮吸取并移動至上限位,底盤再次旋轉(zhuǎn),使機械手的吸盤處于放蛋皮處的正上方,機械手向下移動,吸盤把蛋皮移動至桌上,吸力取消,蛋皮放下,機械手上升至上限位,吸盤旋轉(zhuǎn),然后重復進行上面的動作[4]。
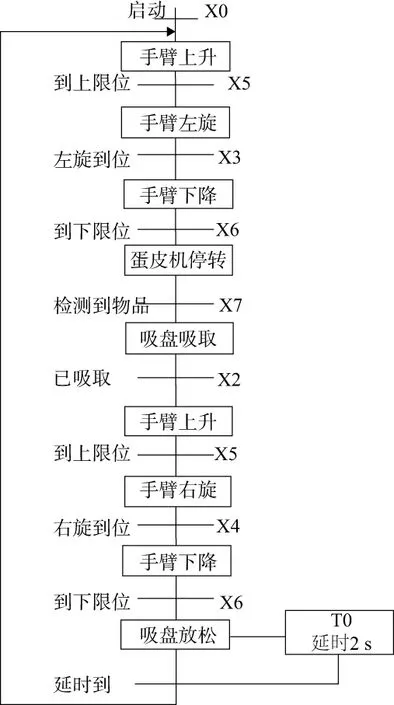
圖4 機械手動作示意圖
2.4 蛋皮機的虛擬裝配
圖5所示為蛋皮機的整體裝配圖,三大部分之間的關系為:送料裝置通過輸送泵(未畫出)由輸送管將蛋液輸送到噴頭,蛋液均勻輸送到位于下方的電餅鐺工位內(nèi),經(jīng)由電餅鐺加熱后,機械手從吸盤中取出。
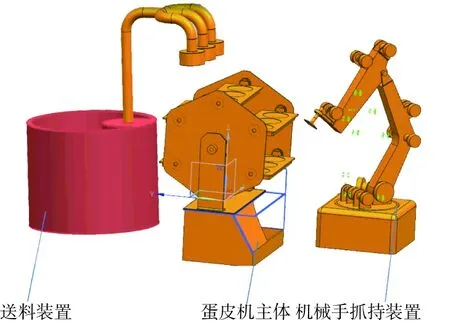
圖5 蛋皮機的整體裝配圖
3 蛋皮機的工作過程
蛋皮機的工作流程如圖6所示。首先制作好蛋液,并將蛋液加入與送料裝置相連的料桶內(nèi)。總開關上電,通過控制器(未畫出),動力源泵通電,啟動上料裝置,機架開始旋轉(zhuǎn),同時電餅鐺加熱電源啟動,轉(zhuǎn)子轉(zhuǎn)動電機。蛋液開始從備料箱經(jīng)過輸送泵的自吸原理輸送到管道中,經(jīng)過流量控制器,可顯示已經(jīng)流動的原材料量的多少。當流量達到設定值時,流量控制系統(tǒng)反饋到主控制器中,泵停止工作。90°閥默認開啟,蛋液經(jīng)過輸送管進入噴頭中。在電餅鐺短暫處于最高位即噴頭下方時(定義此位置為第1工位,本實施例中有6個電餅鐺,定義轉(zhuǎn)子轉(zhuǎn)動1圈,就經(jīng)過了6個工位),輸送泵送料,蛋液下落到鍋面內(nèi)工位,逆時針向后轉(zhuǎn)動轉(zhuǎn)子,電餅鐺運動到第6工位時,蛋餅已經(jīng)成品,機械手吸取出蛋餅,退回到安全工位,同時發(fā)送反饋信號給控制器,結(jié)束一個工作流程[2]。

圖6 工作流程圖
4 蛋皮機的運動仿真
利用UG/Motion的功能給蛋皮機三維實體模型的各個部件賦予一定的運動學特性,建立運動仿真模型[5]。通過對蛋皮機運動機構(gòu)的裝配分析和運動合理性分析,驗證了運動機構(gòu)設計是合理的,運動解算方案求解操作結(jié)果如圖7所示。
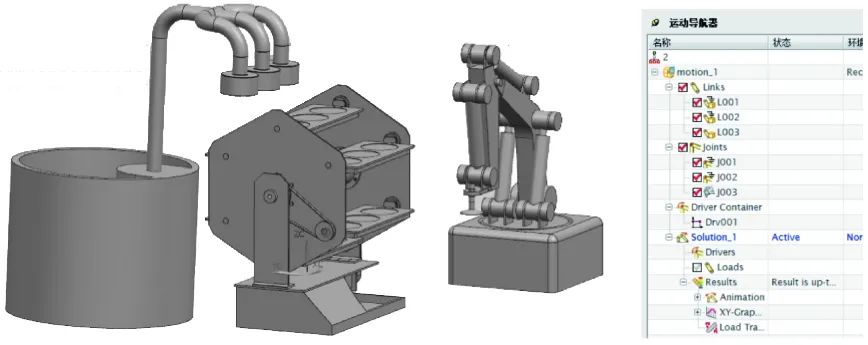
圖7 運動解算方案求解操作結(jié)果圖
5 結(jié)語
文中闡述了全自動蛋皮機的設計方案,主要對蛋皮機主體部分進行結(jié)構(gòu)設計和三維建模,并對三大部件動力源裝置、蛋皮機主體、機械手抓取裝置進行裝配和運動仿真,說明了蛋皮機的整個工作過程,并對蛋皮機主要部件進行有限元分析。通過以上仿真實驗,說明此蛋皮機理論設計可行。在實際的生產(chǎn)轉(zhuǎn)化過程中,根據(jù)所遇到的問題,還可以進一步優(yōu)化。