工業(yè)電阻爐溫度模糊控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
2022-08-19 13:25:04王晨豐
工業(yè)加熱 2022年6期
王晨豐
(商洛職業(yè)技術(shù)學(xué)院 機(jī)電工程學(xué)院,陜西 商洛 726000)
由于電阻爐溫度控制系統(tǒng)具有單向性、大滯后、慣性和時(shí)變性的特點(diǎn),控制過(guò)程較復(fù)雜,難以用精確的數(shù)學(xué)模型描述出來(lái),并且當(dāng)其溫度一旦超調(diào)就無(wú)法用常規(guī)控制手段來(lái)使其降溫[1]。針對(duì)具有上述特性的電阻爐,模糊控制剛好適合數(shù)學(xué)模型未知或多變的控制過(guò)程。模糊控制是基于人工操作的經(jīng)驗(yàn),把模糊理論應(yīng)用到溫度控制系統(tǒng)中,設(shè)計(jì)模糊控制器對(duì)電阻爐爐溫進(jìn)行控制,并選擇恰當(dāng)?shù)哪:刂扑惴ㄟM(jìn)行調(diào)節(jié),使?fàn)t溫達(dá)到設(shè)置溫度的誤差范圍值以內(nèi)。
本文基于模糊控制原理,依據(jù)其優(yōu)點(diǎn)設(shè)計(jì)了一個(gè)自動(dòng)調(diào)節(jié)的模糊控制器,通過(guò)在線調(diào)整修正因子來(lái)改變模糊控制規(guī)則,修正因子可根據(jù)模糊目標(biāo)調(diào)整大小,從而調(diào)整模糊控制規(guī)則的新算法,實(shí)現(xiàn)控制過(guò)程中參數(shù)的最佳調(diào)整。并最終在MATLAB中的模糊邏輯工具箱和Simulink基礎(chǔ)上,對(duì)模糊控制系統(tǒng)進(jìn)行仿真實(shí)驗(yàn),結(jié)果表明模糊控制系統(tǒng)具有一定的優(yōu)越性和可控性。
1 電阻爐溫度控制系統(tǒng)的相關(guān)概述
1.1 電阻爐溫度控制
為了達(dá)到較好的控制效果,電阻爐溫度控制系統(tǒng)大多采用閉環(huán)控制系統(tǒng)實(shí)現(xiàn)。首先,將電阻爐當(dāng)前的實(shí)際溫度值讀取并記錄;其次,通過(guò)實(shí)際值與設(shè)定溫度值的比較,將溫差信號(hào)送入控制器中得到控制信號(hào),該信號(hào)進(jìn)一步作用于輸出裝置,最終通過(guò)調(diào)節(jié)電阻加熱絲的電流或電壓來(lái)實(shí)現(xiàn)對(duì)溫度的控制。
1.2 模糊控制
隨著控制技術(shù)快速穩(wěn)步的發(fā)展,模糊控制已成為控制技術(shù)中應(yīng)用范疇最廣泛的一種。針對(duì)電阻爐來(lái)說(shuō),模糊控制是在建立電阻爐模糊模型的基礎(chǔ)上運(yùn)用模糊推理等方法,實(shí)現(xiàn)對(duì)電阻爐溫度控制的過(guò)程。因此建立恰當(dāng)?shù)哪:P褪菍?shí)施有效模糊控制的先決條件,模糊模型的建立需要多個(gè)模塊的配合合作,包括系統(tǒng)中模糊關(guān)系的處理,模糊語(yǔ)言的規(guī)則以及有關(guān)變量,模糊控制器輸入/輸出等相關(guān)操作[2]。
模糊控制與傳統(tǒng)的控制方法比較,具有以下優(yōu)點(diǎn):
(1)可實(shí)現(xiàn)非線性控制;
(2)無(wú)需電阻爐的精確數(shù)學(xué)模型即可實(shí)現(xiàn)良好的控制;
(3)可模擬人的模糊推理過(guò)程。
2 電阻爐溫度模糊控制系統(tǒng)的設(shè)計(jì)
2.1 模糊控制器的設(shè)計(jì)
2.1.1 模糊控制系統(tǒng)的組成
與傳統(tǒng)的控制系統(tǒng)相比,模糊控制有較強(qiáng)的適應(yīng)對(duì)象參數(shù)變化的能力,模糊控制的優(yōu)點(diǎn)在于設(shè)計(jì)系統(tǒng)時(shí)只需已儲(chǔ)備的相關(guān)知識(shí)和經(jīng)驗(yàn)即可,無(wú)需建立被控對(duì)象的精確數(shù)學(xué)模型。本文設(shè)計(jì)的模糊控制系統(tǒng)主要由模糊控制器、輸入/輸出口、實(shí)施機(jī)構(gòu)、被控目標(biāo)和測(cè)試反饋裝置等五個(gè)部分組成,如圖1所示。

圖1 模糊控制系統(tǒng)組成圖
(1)被控目標(biāo):需要實(shí)現(xiàn)控制的生產(chǎn)過(guò)程、設(shè)備或機(jī)器裝置等;
(2)實(shí)施機(jī)構(gòu):使用電力、氣體、液體為能源并通過(guò)類似電機(jī)、氣缸等裝置轉(zhuǎn)化為驅(qū)動(dòng)作用輸出的一類機(jī)構(gòu);
(3)模糊控制器:屬于模糊控制系統(tǒng)的核心部分,由五部分組成;
(4)輸入/輸出口:系統(tǒng)中使用的相關(guān)轉(zhuǎn)換單元,或者是適合于模糊邏輯處理的模糊化和清晰化環(huán)節(jié)稱為模糊控制器的輸入/輸出口;
(5)測(cè)試裝置:由不同類別的數(shù)字或模擬的測(cè)量?jī)x器、檢測(cè)元件或傳感器等組成。該裝置負(fù)責(zé)將系統(tǒng)中被控目標(biāo)轉(zhuǎn)換為電信號(hào),要求其精度高、穩(wěn)定可靠[3]。
2.1.2 模糊控制器的設(shè)計(jì)
模糊控制系統(tǒng)的基本原理圖如2所示,其核心部分為模糊控制器,如圖2中虛線框中部分所示。
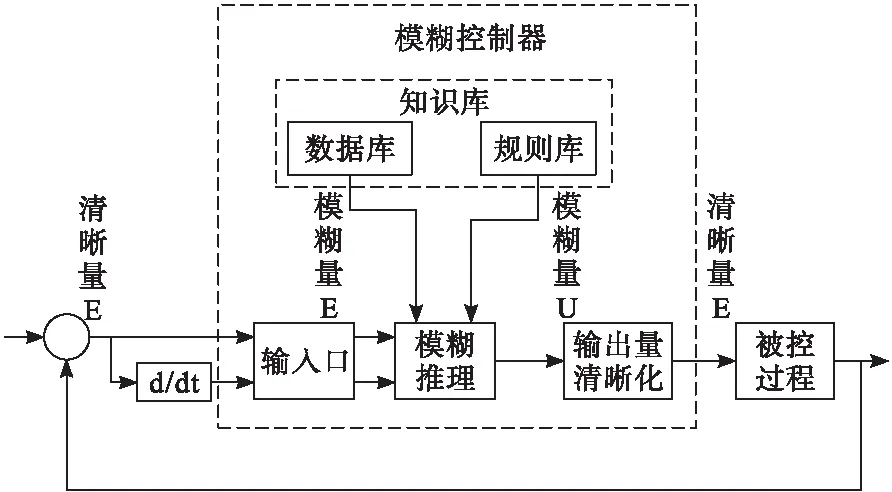
圖2 模糊控制系統(tǒng)設(shè)計(jì)原理
模糊控制器由輸入口、數(shù)據(jù)庫(kù)、規(guī)則庫(kù)、模糊推理和輸出量清晰化五大功能模塊組成。
(1)輸入口:是將系統(tǒng)中輸入的確定值轉(zhuǎn)換成模糊矢量的接口。
(2)數(shù)據(jù)庫(kù)的建立:數(shù)據(jù)庫(kù)的建立即確定輸入變量(E和EC)和輸出變量(U)所對(duì)應(yīng)的模糊子集的模糊分布,它是實(shí)現(xiàn)模糊控制算法的基礎(chǔ),為建立良好的模糊控制系統(tǒng)做鋪墊。通常狀況下,電阻爐熱工過(guò)程中產(chǎn)生的溫度偏差和偏差變化率所處的模糊子集相互組合會(huì)發(fā)起多個(gè)模糊控制規(guī)則。
(3)規(guī)則庫(kù)的建立:對(duì)電阻爐在溫度控制下輸出的集中描述稱為模糊控制規(guī)則,一系列的規(guī)則和規(guī)則表構(gòu)成了相關(guān)聯(lián)的規(guī)則庫(kù)。模糊控制規(guī)則表的范圍由條件判斷語(yǔ)句的數(shù)量決定,規(guī)則表中模糊子集的輸出是通過(guò)專家豐富的經(jīng)驗(yàn)和現(xiàn)場(chǎng)多次調(diào)試后總結(jié)得出的,而本文設(shè)計(jì)的電阻爐模糊控制系統(tǒng)中涉及的模糊子集是通過(guò)在電阻爐加熱或冷卻設(shè)備上施加的控制信號(hào)得到的。
(4)模糊推理:是指將已建成的控制規(guī)則庫(kù)和輸入的變量轉(zhuǎn)換成模糊矢量的過(guò)程。
(5)輸出量清晰化:是將模糊推理所得的模糊量轉(zhuǎn)換為清晰的數(shù)字量的過(guò)程。
2.2 模糊模型的設(shè)計(jì)
本文將小型高溫電阻爐當(dāng)作具有平衡能力且存在滯后的被控對(duì)象,其近似數(shù)學(xué)模型可用一階慣性和純滯后兩個(gè)環(huán)節(jié)來(lái)描述。采用階躍響應(yīng)曲線法求取其參數(shù),得到電爐系統(tǒng)的開(kāi)環(huán)增益約為83,慣性時(shí)間常數(shù)約為118,純滯后時(shí)間常數(shù)約為100,則系統(tǒng)的傳遞函數(shù)如式(1)所示[4]:
(1)
2.3 溫度控制系統(tǒng)的電路設(shè)計(jì)
本文設(shè)計(jì)的電路采用交流型固態(tài)繼電器,它是一種非接觸開(kāi)關(guān)部件,與普通繼電器相比,無(wú)觸點(diǎn),在接通和斷開(kāi)電路的時(shí)候無(wú)火花出現(xiàn),還具備控制端和負(fù)載端相互隔離的功能。工作原理如圖3所示。

圖3 固態(tài)繼電器工作原理
其中各個(gè)電路系統(tǒng)作用如下:
耦合電路:防止輸出對(duì)輸入的影響,引起不必要的錯(cuò)誤。
觸發(fā)電路:發(fā)生符合要求的觸發(fā)信號(hào),控制④的通斷操作。
過(guò)零電路:防止固體繼電器開(kāi)關(guān)通斷對(duì)電網(wǎng)造成的損害污染。
吸收電路:用來(lái)吸收電網(wǎng)的尖峰、浪涌電壓。
3 電阻爐溫度模糊控制系統(tǒng)的仿真實(shí)驗(yàn)
3.1 實(shí)驗(yàn)條件
本文設(shè)計(jì)的系統(tǒng)模擬量輸入通道主要由K型熱電偶和MAX6675芯片構(gòu)成,通過(guò)上述通道將保證該電路運(yùn)行可靠,測(cè)溫結(jié)果穩(wěn)定性和線性度良好,測(cè)溫范圍基本能滿足電阻爐安全生產(chǎn)的需求。模擬量輸出通道主要由智能溫度控制器、交流型固態(tài)繼電器和加熱裝置組成,具有較強(qiáng)的抗干擾和電磁兼容性能,為順利完成溫度控制工作打下良好的基礎(chǔ)[5]。
3.2 仿真模型的建立
根據(jù)上述2.2中已知的模糊模型,進(jìn)行的仿真實(shí)驗(yàn)如下:
(1)打開(kāi)MATLAB軟件,進(jìn)入Simulink界面,開(kāi)始搭建系統(tǒng)模型。
(2)在Simulink中,用戶根據(jù)自己設(shè)計(jì)系統(tǒng)的需要選擇所需模塊,用鼠標(biāo)將其拖動(dòng)到所設(shè)計(jì)的系統(tǒng)模型中,在仿真模型結(jié)構(gòu)圖中布置好位置并連線,最后可通過(guò)信號(hào)接收與輸出示波器Scope觀察系統(tǒng)的仿真輸出。按照同樣的方法選擇模糊控制模塊并接入,如圖4所示。

圖4 電阻爐MATLAB仿真結(jié)構(gòu)圖
(3)對(duì)模糊控制模塊進(jìn)行設(shè)置。在MATLAB 主窗口輸入“fuzzy”后回車,即進(jìn)入模糊推理系統(tǒng)編輯器界面(FIS)。先增加一個(gè)輸入變量,將輸入及輸出變量分別命名為E、EC及U,其中E為溫度偏差模糊變量,EC為溫度偏差變化率模糊變量,U為輸出模糊變量。再將這個(gè)FIS文件命名為“l(fā)wkz”,即爐溫控制。最后得到如圖5所示的雙輸入-單輸出的FIS編輯器界面。

圖5 爐溫控制的FIS編輯器界面
(4)模糊變量E及EC的模糊論域用N={-6,-4,-2,0,2,4,6}表示,對(duì)應(yīng)模糊子集為{NB,NM,NS,Z,PS,PM,PB},其中的N為負(fù),P為正,B為大,M為中,S為小,Z為零。在圖5的FIS編輯器界面上單擊輸入、輸出變量,編輯取值范圍、顯示范圍、模糊子集的個(gè)數(shù)及分布、隸屬函數(shù)類型等,得到隸屬函數(shù)編輯器(MF)界面如圖6所示。
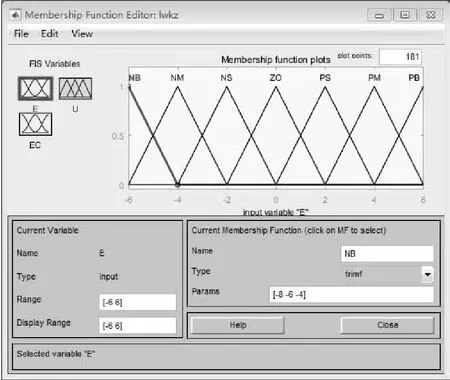
圖6 爐溫控制的MF編輯器界面
(5)在圖6的爐溫控制隸屬函數(shù)編輯器界面上,點(diǎn)擊Edit|Rules…,彈出模糊控制規(guī)則編輯器(Rule)界面如圖7所示。模糊變量E及EC的模糊子集數(shù)均為7,組合搭配后產(chǎn)生49條模糊控制規(guī)則,對(duì)應(yīng)輸出模糊變量U的子集{NB,NM,NS,Z,PS,PM,PB}。逐次單擊相應(yīng)的模糊子集名稱編輯,再點(diǎn)擊編輯功能中的“Add rule”按鈕,最終得到全部的模糊控制規(guī)則如圖7所示。
(6)將完成的“Fuzzy Logic Controller ”模塊嵌入到名為“l(fā)wkz”的FIS文件中,使該模塊與Sumulink成功連接,即可進(jìn)行仿真。待仿真模型連線完畢,檢查無(wú)誤后就可以按下[Run]按鈕,運(yùn)行仿真程序,進(jìn)行仿真實(shí)驗(yàn),在示波器中觀察仿真實(shí)驗(yàn)結(jié)果,對(duì)照模糊規(guī)則觀測(cè)窗和輸出曲面觀測(cè)窗的內(nèi)容,不斷對(duì)模型進(jìn)行調(diào)整與修改,直至將模糊控制參數(shù)設(shè)置好。
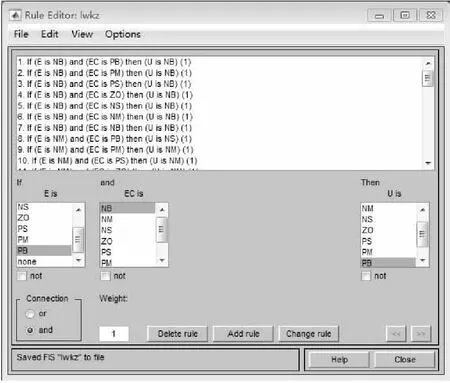
圖7 爐溫控制的模糊控制規(guī)則編輯器界面
3.3 仿真實(shí)驗(yàn)結(jié)果
采用模糊控制算法,得出階躍響應(yīng)仿真結(jié)果如圖8所示。

圖8 模糊控制下?tīng)t溫控制系統(tǒng)的響應(yīng)結(jié)果
通過(guò)仿真實(shí)驗(yàn)可知,該小型高溫電阻爐要求爐溫控制為(560±10) ℃,正常工作爐膛溫度上升速率為3 ℃/s。采用該模糊控制規(guī)則能保證小型電阻爐控制精度在給定值±3 ℃誤差范圍之內(nèi),溫度控制過(guò)程超調(diào)量幾乎為零,過(guò)渡過(guò)程時(shí)間短,耗能低。通過(guò)MATLAB仿真,還可以得出,對(duì)于不同的被控對(duì)象可適當(dāng)?shù)恼{(diào)整模糊控制器的各種參數(shù),最終都可以得到較為滿意的結(jié)果[6]。
4 總 結(jié)
本文是針對(duì)電阻爐滯后性和調(diào)節(jié)時(shí)間長(zhǎng)等特點(diǎn)設(shè)計(jì)和研究的溫度模糊控制系統(tǒng)。研究中采用了模糊控制器,實(shí)現(xiàn)了對(duì)控制系統(tǒng)的自適應(yīng)控制,當(dāng)采用該模糊控制時(shí),整個(gè)系統(tǒng)的調(diào)節(jié)時(shí)間短,且基本未出現(xiàn)超調(diào)現(xiàn)象,系統(tǒng)穩(wěn)定且精度高。系統(tǒng)基于模糊控制算法和MATLAB仿真實(shí)驗(yàn)完成了對(duì)電阻爐溫度控制的目標(biāo),實(shí)現(xiàn)了電阻爐熱工生產(chǎn)過(guò)程中高溫控制段的高效、安全、快速的控制過(guò)程要求。此外,模糊控制器的完善是今后研究的重點(diǎn)內(nèi)容,可進(jìn)一步提高系統(tǒng)的實(shí)際溫度控制效果。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
幸福(2018年33期)2018-12-05 05:22:42
Coco薇(2017年11期)2018-01-03 20:59:57
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
