基于ELM-ARX組合模型的預測控制算法研究及應用
2022-08-23 08:38:12趙朋程賈紅霞
科技風 2022年21期
陳 穎 趙朋程 賈紅霞 楊 麗 馬 健
石家莊學院機電學院 河北石家莊 050035
實際工業控制系統中,許多控制對象都是多變量系統,具有非線性、時滯性和不確定性。多數的控制算法對模型精度具有較大的依賴性,建模技術在現代的工業生產中起著極其重要的作用。另外,工業流程控制過程中存在許多不確定性干擾因素,導致控制算法的控制精度較低。
經過眾多學者的改進研究,模型預測控制(Model Predictive Control,MPC)[1]技術對實際工業過程控制產生了巨大影響,并且已經在工業過程多個領域中獲得了成功應用,如網絡化多智能體[2]、永磁同步機[3]、硅單晶直徑生成控制[4]、直升機軌跡跟蹤控制[5]等。在模型預測控制算法研究中,建立控制系統的預測模型精度決定了后續預測控制的效果。因此,相關學者采用組合模型建模的思想建立被控系統的模型,進而實現預測控制的研究。如Chen等[6]提出了一種自適應多層非線性組合模型預測控制算法,并將其應用于水泥熟料燒成過程篦冷機系統的控制仿真中;Yin等[7]將連續攪拌釜反應器作為被控對象,提出了一種基于映射數值組合模型的預測控制算法;Xiao等[8]結合多目標蝙蝠優化算法構建了組合預測模型,并在風電預測中實驗應用;楊劍鋒等[9]提出一種自適應并聯組合模型預測控制算法,在化工酸堿中和反應過程中進行了仿真實驗;郝曉辰等[10]提出了一種BP-ARX組合模型預測控制算法,并成功應用于水泥分解爐溫度多變量控制中。
Huang等提出了極限學習機(Extreme Learning Machine,ELM)建模方法[11-12],ELM是一種單隱含層前饋神經網絡,訓練速度快,有優良的泛化性能,避免了如BP神經網絡容易陷入局部最小值、訓練速度緩慢等問題,在各個領域得到了廣泛應用。如數據函數辨識[13]、光伏發電量預測模型[14]、齒輪故障診斷[15]、太陽輻射率模型[16]、自適應控制模型[17]等。因此,將ELM應用到預測控制系統建模中是可行的。
因此,本文首先采用ELM算法建立控制系統的穩態非線性模型,利用具有外界輸入的自回歸算法(Auto Regressive with eXogenous inputs,ARX)[18]建立控制系統的動態線性模型,構建控制系統的ELM-ARX組合模型;其次,推導預測步數內控制系統的被控變量預測輸出值,提出基于ELM-ARX組合模型的預測控制算法;最后,通過Matlab數據仿真實驗以及水箱控制應用實驗,驗證提出的預測控制算法有效性和可行性。
1 ELM-ARX組合模型建立
1.1 ELM穩態非線性模型
極限學習機通過對輸入層到隱含層權重與隱含層的閾值的隨機賦值,將單隱含層前饋神經網絡的參數訓練轉化為求解線型方程組。根據Moore-Penrose廣義逆求解的到方程組的最小范數最小二乘解作為隱含層到輸出層的權重,即完成了極限學習機的訓練。極限學習機網絡結構如圖1所示。

圖1 極限學習機網絡結構圖Fig.1 Network structure diagram of Extreme Learning Machine
(1)

控制系統非線性穩態模型可表達為如式(2)所示的矩陣形式:
Y=Hβ
(2)
式中,隱層輸出矩陣H=[hkj],hkj=g(ωkuj+bk),輸出層權值矩陣β=[β1,β2,…βk,…,βm]T,輸出矩陣Y=[y1,y2,…yj,…,yN]T。

(3)
式中,H+為隱層輸出矩陣H的摩爾彭德羅斯廣義逆。
1.2 ARX動態線性模型
ARX模型是一種黑箱模型,由操作變量、被控變量和系統噪聲干擾量組成的,能表示系統特性的線性數學模型,利用最小二乘法即可直接獲得控制系統的動態線性模型。
設被控系統的動態線性特性可用如下ARX模型來近似描述:
A(q)y(k)=B(q)u(k)+e(k)
(4)
式中,A(q)=1+a1q-1+…+anq-n,B(q)=b1q-1+b2q-2+…+bmq-m,q-1為后移算子,e(k)是白噪聲。
用獲得的nu個輸入的偽隨機二進制(PRBS)信號激勵系統,測得對應的ny個輸出變量的值,用最小二乘法辨識得到如下描述系統增量關系的2階ARX動態線性模型:
Δy(k)=A1Δy(k-1)+A2Δy(k-2)+B1Δu(k-1)+B2Δu(k-2)
(5)
式中,A1、A2、B1、B2為動態模型參數,A1,A2∈Rny×ny,B1,,B2∈Rny×nu;Δy(k)=y(k)-ys(k),Δu(k)=u(k)-us(k);ys(k),us(k)分別是系統穩態輸出輸入。
1.3 組合模型建立
用線性ARX模型來描述非線性控制系統的動態特性,用偽隨機二進制信號來測試控制對象。令:
A0=I-A1-A2
(6)
則控制系統動態線性模型的穩態增益矩陣K∈Rny×nu可表示為:
(7)
式(7)的穩態增益就是ARX模型的動態增益。保持A1、A2不變,令:
(8)
將式(8)代入式(5),控制系統的非線性特性可描述為:
(9)
可求得輸入變量ui(k)對應于輸出變量yj(k)的動態增益為:
(10)
由此,可求得任意輸入u(k)所對應的動態增益矩陣Ks。對于非線性控制系統來說,用當前時刻的實際輸出值所對應的動態增益Kc和下一個輸出設定值所對應的動態增益Kn的線性外推插值來表示未來預測時域內的實際動態增益,將會具有較高的預測精度。所以在未來預測時域內的輸入u(k+p)所對應的動態增益,可用下式表示:
(11)
式中,Kn、Kc分別是穩態輸入向量us(k),us(k+1)對應的動態增益矩陣。

(12)
綜上所述,建立的ELM-ARX組合模型結構如圖2所示。通過系統實際的動態增益將系統的ELM穩態模型和ARX動態模型有機地結合在一起,推導出了包含系統穩態特性和動態特性的ELM-ARX組合模型,該組合模型可以完全反映出控制系統的特性。

圖2 ELM-ARX組合模型結構圖Fig.2 Structure diagram of ELM-ARX combined model
2 基于ELM-ARX組合模型的預測控制算法研究
2.1 輸出預測
取預測時域為P,控制時域為M(且P≥M),推導ELM-ARX組合模型的輸出預測值計算表達式。為使模型輸出與實際輸出數據的誤差最小,即按式(13)求取一組適當的模型參數使得取得最小值。
(13)
對式(13)求導,即可求得模型的最優辨識參數A1、A2、B1、B2。令:
(14)
式中,n=2,3,…,P+1,S∈Rny×ny,T∈Rny×nu,Tg∈Rny×nu。
寫成矢量形式,多步輸出預測增量值的表示式為:
G22Δu2(k-1)+F1Δy(k)+F2Δy(k-1)
(15)
根據式(19)求得的未來預測時域內輸出增量值,預測輸出經位移矩陣進行轉換,從而可得到預測輸出:

(16)
2.2 滾動修正
為了消除諸多因素引起的預測值的誤差,采用滾動誤差修正法對其修正,利用k時刻的預測誤差:

(17)

(18)
取參考軌跡為:
(19)

則控制系統帶約束的最優化目標函數及其約束條件可表示如下式所示:
(20)
式中,Q=qI、R=rI分別是輸出誤差和控制增量的加權矩陣,I是單位矩陣。
得到最優控制增量后,取第一組最優控制增量Δu(k),通過插值法即可得當前時刻的最優控制輸入:
u(k)=u(k-1)+Δu(k)
(21)

當求得的當前時刻的控制輸入u(k)作用到控制系統中去,再進行下一步的優化求解,如此循環執行下去即完成了預測控制的滾動修正問題。將每一步所求得的最優輸入量值作用到系統中,得到當前時刻的實際系統輸出,循環遞推即可完成對整個控制系統的預測控制。
3 實驗驗證及應用研究
為了驗證提出的基于ELM-ARX組合模型預測控制算法的性能,從數據仿真驗證實驗和水箱實際控制實驗應用兩個方面進行驗證。數據仿真驗證實驗方面主要是針對兩輸入兩輸出模型數據,進行Matlab軟件仿真控制驗證實驗,驗證提出的基于ELM-ARX組合模型預測控制算法的有效性;水箱實際控制實驗應用方面,本文基于Visual Studio編程軟件開發了基于ELM-ARX組合模型預測控制算法的控制軟件系統,并將其應用于雙容水箱過程控制系統上,完成預測控制算法測試實驗應用研究,測試算法對工業過程進行控制的可行性。
3.1 仿真驗證實驗
為了驗證提出的ELM-ARX組合模型預測控制算法的性能,選取BP-ARX組合模型[10]作為對比。針對如式(22)兩輸入兩輸出模型非線性系統[19]進行數據模型辨識與Matlab仿真控制實驗。
(22)
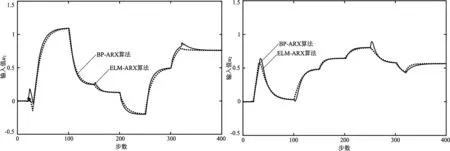
建立上述兩入兩出系統的ELM-ARX模型與BP-ARX模型,分別采用兩個模型進行預測控制仿真實驗,進行400步預測控制,ELM-ARX組合模型預測控制算法與BP-ARX組合模型預測控制算法對比控制效果如圖3到圖6所示。

(a)被控變量輸出值y1 (b)被控變量輸出值y2
(c)操作變量輸出值u1 (d)操作變量輸出值u2
由圖3數據仿真實驗控制效果可知,采用本文提出的ELM-ARX模型與BP-ARX模型均可以使被控變量y1、y2較為平穩控制在設定值附近,但是基于本為提出的ELM-ARX模型進行的預測控制,非線性系統y1、y2超調量較小,表明本文提出的基于ELM-ARX組合模型預測控制算法的控制精度較高,可以獲得更優的控制效果。
在第100步數時,圖3(a)中被控變量y1設定值由1.0調整為0.5,圖3(b)中被控變量實際值y2有一定波動,通過操作變量輸入值和的調整,使得被控變量y1、y2快速穩定在設定值附件,并且基于ELM-ARX模型相比較BP-ARX模型使得被控變量實際值y2波動較小,體現出本文提出的基于ELM-ARX組合模型預測控制算法具有較強的干擾能力。
另外,在仿真控制程序運算時間方面,ELM-ARX模型運行時間為16.2541s,BP-ARX模型運行時間為65.5285s。可知,采用ELM-ARX模型的預測控制程序運算時間大大縮短,表明基于ELM-ARX的組合模型占用計算機資源小,這對于控制程序的長期在線運行是非常有利的。
3.2 水箱平臺應用實驗
為了進一步測試提出的基于ELM-ARX組合模型預測控制算法對工業過程進行控制的可行性,基于本文提出的理論算法,研發了模型辨識及預測控制軟件系統。該軟件系統與雙容水箱控制平臺通過OPC通信協議進行數據傳輸,可以完成對水箱平臺數據的讀取、存儲、模型辨識以及控制變量操作值寫入。
在水箱系統平臺實驗中,為了驗證本文提出的基于ELM-ARX組合模型預測控制算法多入多出控制系統的可行性,選取上水箱和下水箱電動調節閥閥門開度作為操作變量,上水箱和下水箱液位高度作為被控變量,上水箱和下水箱連接處的進水閥門開度作為干擾變量。同時,由于水箱控制平臺上水箱和下水箱通過連接處的閥門進行連接,此處閥門開度的大小對上水箱液位和下水箱液位均有影響,因此,連接處的閥門開度也是水箱控制平臺實驗兩入兩出模型的耦合變量。
基于水箱平臺上水箱和下水箱電動調節閥不同的閥門開度階躍響應,采集上水箱和下水箱液位高度多組數據。采用ELM-ARX組合模型辨識軟件系統辨識水箱平臺兩入兩出組合模型。將建立好的水箱控制兩入兩出平臺組合模型參數載入預測控制軟件中,設定預測控制軟件系統相關參數,將水箱控制平臺中被控變量水箱液位當前值和設定值通過OPC數據通信模塊傳入預測控制軟件系統中,經過預測控制軟件系統進行計算處理,給出當前操作變量水箱電動調節閥閥門開度的調整量,再通過OPC數據通信模塊將電動調節閥閥門開度的調整量寫入水箱控制平臺,之后循環將水箱液位當前值傳入預測控制軟件系統中,直到水箱液位當前值趨近水箱液位設定值附近,即可完成水箱控制平臺預測控制應用實驗。水箱平臺應用實驗控制效果如圖4所示。

(a)上水箱被控變量液位高度 (b)下水箱被控變量液位高度

(c)上水箱操作變量閥門開度 (d)下水箱操作變量閥門開度
由圖4水箱平臺控制效果總體可知,基于ELM-ARX組合模型預測控制算法預測出的上下液位高度預測值與實際值偏差不大,當上下水箱液位高度在達到設定值之前,通過上下水箱閥門開度的預測調節,上下水箱液位高度穩定在設定值附近,達到預期控制預期效果。
在第1分鐘左右,圖4(b)中水箱平臺控制效果下水箱液位設定值由37cm提高為43cm,圖4(d)中下水箱閥門開度設定值小幅度提高。另外,由于有上下水箱連接處閥門開度耦合變量的存在,上水箱中的水通過連接處閥門流到下水箱中,使得上水箱液位高度實際值下降,通過預測控制軟件系統算法計算,小幅度提高圖4(c)中上水箱閥門開度。通過上述調整,使得上下水箱液位實際值均穩步貼近于液位高度設定值,未出現過大的超調。
第2.5分鐘左右,圖4(a)中上水箱液位高度設定值由48cm設定為36cm時,為了進一步驗證本文提出基于ELM-ARX組合模型預測控制算法的多變量耦合控制的先進性,本水箱平臺應用實驗分別增大上下水箱連接處耦合閥門開度以及下水箱出水閥門開度,使得第2.5分鐘左右圖4(b)中下水箱液位高度實際值變大。為了穩定上下水箱液位高度,圖4(c)中上水箱閥門開度大幅度降低,圖4(d)中下水箱閥門開度小幅度提高。經計算,上下水箱液位高度最大超調量基本上均在9%左右浮動,甚至更小,控制效果明顯。這充分體現出ELM-ARX組合模型進行過程控制的先進性和穩定性。
綜上所述,基于ELM-ARX組合模型預測控制算法,將設計的預測控制軟件系統應用于水箱控制平臺,可穩定控制水箱液位,驗證了本文提出的算法應用于工業過程控制的可行性。
結語
本文通過調節增益的方法實現了穩態模型和動態模型的有機結合,構建了控制系統的ELM-ARX組合模型;推導了預測步數內控制系統的被控變量預測輸出值,提出了基于ELM-ARX組合模型的預測控制算法。Matlab數據仿真實驗結果表明,采用ELM-ARX組合模型可以建立多入多出非線性系統控制模型,并取得較優的預測控制效果;基于本文提出的算法,研發了基于ELM-ARX組合模型的預測控制軟件系統,進行了雙容水箱平臺應用實驗,應用實驗結果表明,設計的預測控制軟件系統實現了雙容水箱的精準控制以及多變量耦合控制,表明本文提出的基于ELM-ARX組合模型的預測控制算法具有較強的穩定性。提出的ELM-ARX組合模型預測控制算法以及研發的預測控制軟件系統,不僅奠定了預測控制算法理論基礎,也對實現工業流程精細化控制具有重要的實際意義和應用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
流程工業(2022年3期)2022-06-23 09:41:08
煤氣與熱力(2021年3期)2021-06-09 06:16:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
光學精密工程(2016年6期)2016-11-07 09:07:19
汽車維護與修理(2015年2期)2015-02-28 12:15:41
中學科技(2014年11期)2014-12-25 07:38:53
