磁流變沖擊緩沖系統最優廣義賓漢數控制
2022-08-26 07:52:18王目凱陳照波
振動與沖擊 2022年16期
關鍵詞:系統
王 成,王目凱,于 東,陳照波,閆 輝
(1.北京衛星制造廠有限公司,北京 100191;2.哈爾濱工業大學 機電工程學院,哈爾濱 150001)
最大限度地減少傳遞到負載的沖擊載荷是現代運載器設計中的一個重要課題[1]。當運載器在惡劣的環境中運行時,過大的沖擊載荷會對運載器上的設備或人員造成損傷[2-4]。現在的運載器一般采用被動式吸能器來吸收沖擊能量。被動式吸能器一般依靠材料塑性變形制成[5],其載荷行程曲線固定,針對單一負載或固定的沖擊強度設計,無法適應負載質量或者沖擊強度發生變化的工況[6],Mikuowski等[7]提出了一種主動液壓式吸能器,通過液壓伺服,能夠根據需求自適應調節輸出載荷。但是這種設備引入龐大的伺服機構并且需要添加反饋控制帶來了潛在的不穩定性。
磁流變緩沖器(magnetorheological shock absorber,MRSA)作為一種智能器件,具有結構簡單、尺寸和質量小、能耗低、響應速度快、阻尼力可調范圍大的優點,被認為是最理想的半主動耗能器件[8]。磁流變緩沖器在結構上可以看作是一種特殊的液壓油吸能器,不同之處在于磁流變緩沖器內部裝有可控的磁流變液。磁流變液是將微納米級的鐵磁顆粒(一般為羰基鐵顆粒)沉浸在非磁性載液中所形成的懸浮液[9]。磁流變緩沖器的活塞上內嵌有電磁線圈,通過控制電磁線圈的輸入電流,可以調節磁流變緩沖器環形間隙內的磁場強度。環形間隙內磁流變液的剪切屈服強度可以通過調節外加電流的大小來加以控制。與之相對應的是磁流變緩沖器的輸出載荷可由外加電流控制。
基于磁流變緩沖器的沖擊緩沖系統的研究重點在于控制策略的設計。為了最大限度地降低負載沖擊載荷,必須充分利用磁流變緩沖器的行程,實現軟著陸的控制目標,即活塞運動至行程末端速度降為0。Wereley等[10]提出了最優賓漢數控制策略,通過計算整個沖擊緩沖過程中的最優庫侖力,實現軟著陸的目標。在此基礎上,Saleh等[11]通過計算最優賓漢數實現直升機起落架的沖擊防護。Choi等[12]提出了考慮磁流變緩沖器響應時間的最優賓漢數控制策略。Wang等[13]提出了一種最短傷害極限暴露控制策略,將最優賓漢數控制應用于高速沖擊。然而,這種最優賓漢數控制策略是在磁流變緩沖器的線性阻尼模型的基礎上提出的。在高速沖擊下,磁流變緩沖器環形間隙內雷諾數超過2 000,磁流變液的流動狀態開始由層流轉變為紊流狀態[14],磁流變緩沖器輸出的阻尼力與活塞速度呈現近似的二次型關系[15]。
針對磁流變沖擊緩沖系統,本文提出了考慮磁流變緩沖器二次型阻尼特性的最優廣義賓漢數(generalized Bingham number,GBN)控制策略。首先,研制了一種雙線圈式磁流變緩沖器,通過高速沖擊試驗測試了其阻尼力特性;然后,以軟著陸為控制目標,設計了考慮二次型阻尼特性的最優廣義賓漢數控制策略,分析了磁流變沖擊緩沖系統在最優廣義賓漢數下的軟著陸效果;最后,搭建了落錘沖擊緩沖快速控制試驗平臺,通過試驗對比了線性賓漢數控制策略和二次型廣義賓漢數的控制效果。
1 沖擊載荷下磁流變緩沖器的阻尼力
雙線圈式傳統磁流變緩沖器結構原理,如圖1所示。磁流變緩沖器由活塞桿、活塞、液壓缸以及充滿缸筒內部的磁流變液組成。活塞上留有環形液體間隙,活塞桿受振動或沖擊載荷作用迫使磁流變液流過該環形間隙,活塞左右兩腔室產生壓力差,進而在活塞表面形成阻尼力。在液體間隙的內側嵌入電磁線圈,當線圈通入外加電流時,環形間隙內部產生垂直穿越液體流動方向的磁場。在磁場作用下,磁流變液的磁性顆粒在磁場方向上聚集成鏈。間隙內的液體流動時必須剪切磁鏈,因此活塞表面的壓力差增加,磁流變緩沖器輸出的阻尼力也隨之增加。
根據圖1中的原理圖研制磁流變緩沖器,設計參數如表1所示。研制的磁流變緩沖器組件照片如圖2所示。

1.活塞桿;2.活塞;3.線圈;4.液壓缸;5.磁流變液。圖1 磁流變緩沖器結構原理圖Fig.1 Schematic diagram of the MRSA
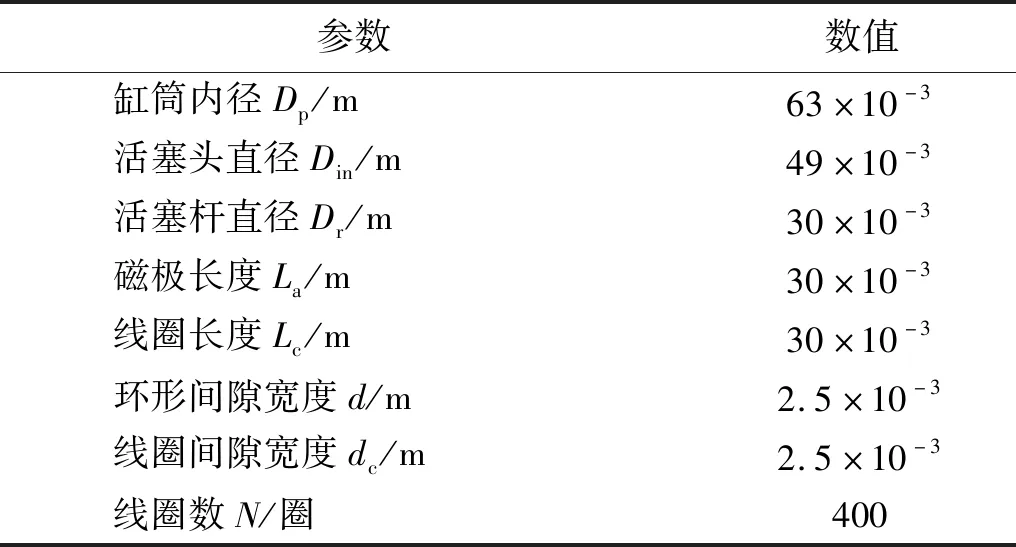
表1 磁流變緩沖器的設計參數Tab.1 The design parameter of MRSA
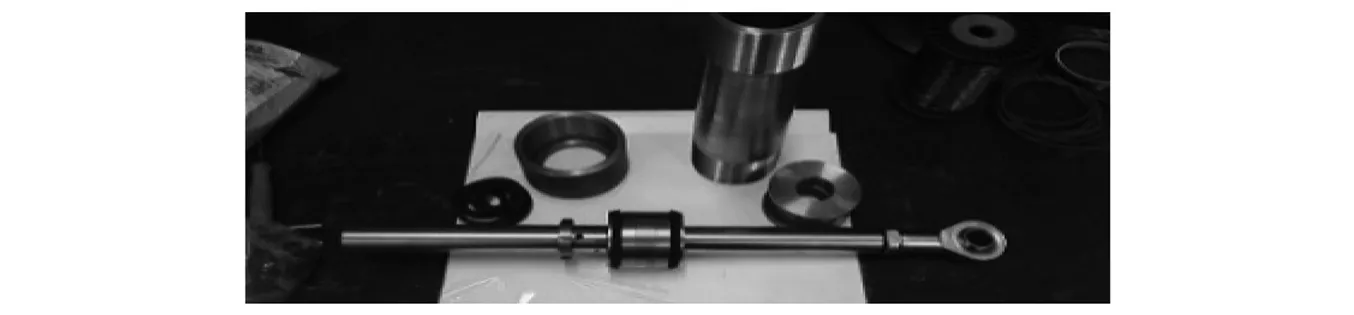
圖2 磁流變緩沖器的組件照片Fig.2 Component photo of MRSA
1.1 磁流變緩沖器的沖擊阻尼力模型
相比于活塞頭的有效橫截面積,環形液體間隙的通道橫截面積比較小,因此當活塞運動時,環形液體間隙內磁流變液流動速度較大。在高速沖擊下,磁流變緩沖器活塞速度較大,間隙內部磁流變液的實際運動狀態也尤為復雜。Singh等[16]考慮磁流變緩沖器液體紊流效應對阻尼力的影響,建立了含有局部損耗的賓漢塑性(Bingham plastic minor,BPM)阻尼力模型,利用環形液體間隙內磁流變液的雷諾數來分析磁流變液的運動狀態。根據BPM模型,磁流變緩沖器的阻尼力可以表示為
F=(ΔPη+ΔPml)Ap+(ΔPτAp+Ff)sign(Vp)
(1)
式中:ΔPη為因液體黏性產生的壓降;ΔPml為因間隙橫截面積變化帶來的壓頭損失產生的壓降;ΔPτ為因磁流變效應產生的剪切屈服壓降;Ap為活塞有效橫截面積;Ff為磁流變緩沖器的摩擦力。
由式(1)可知,磁流變緩沖器活塞表面的壓降由黏性壓降ΔPη、剪切屈服壓降ΔPτ和局部水頭損失壓降ΔPml組成。其中,剪切屈服壓降ΔPτ與環形間隙內液體流動狀態無關,而黏性壓降ΔPη和局部水頭損失壓降ΔPml與液體流動狀態有關。仿真過程中忽略磁流變緩沖器的摩擦力,磁流變緩沖器的零場壓降可以表示為
ΔPfield-off=ΔPη+ΔPml
(2)
當磁流變緩沖器通入電流時,磁流變緩沖器的壓降可以表示為
ΔPfield-on=ΔPfield-off+ΔPτ
(3)
磁流變緩沖器的黏性壓降可以表示為
(4)

環形間隙內磁流變液的雷諾數可以表示為
(5)
式中,η為磁流變液黏度。
環形間隙內磁流變液的流動狀態與磁流變液的雷諾數有關。由式(5)可知,磁流變液的雷諾數與活塞運動速度成正比。當活塞運動速度較小,環形間隙內液體雷諾數Re≤2 000時,磁流變液處于層流狀態,此時達西摩擦因數可以表示為
(6)
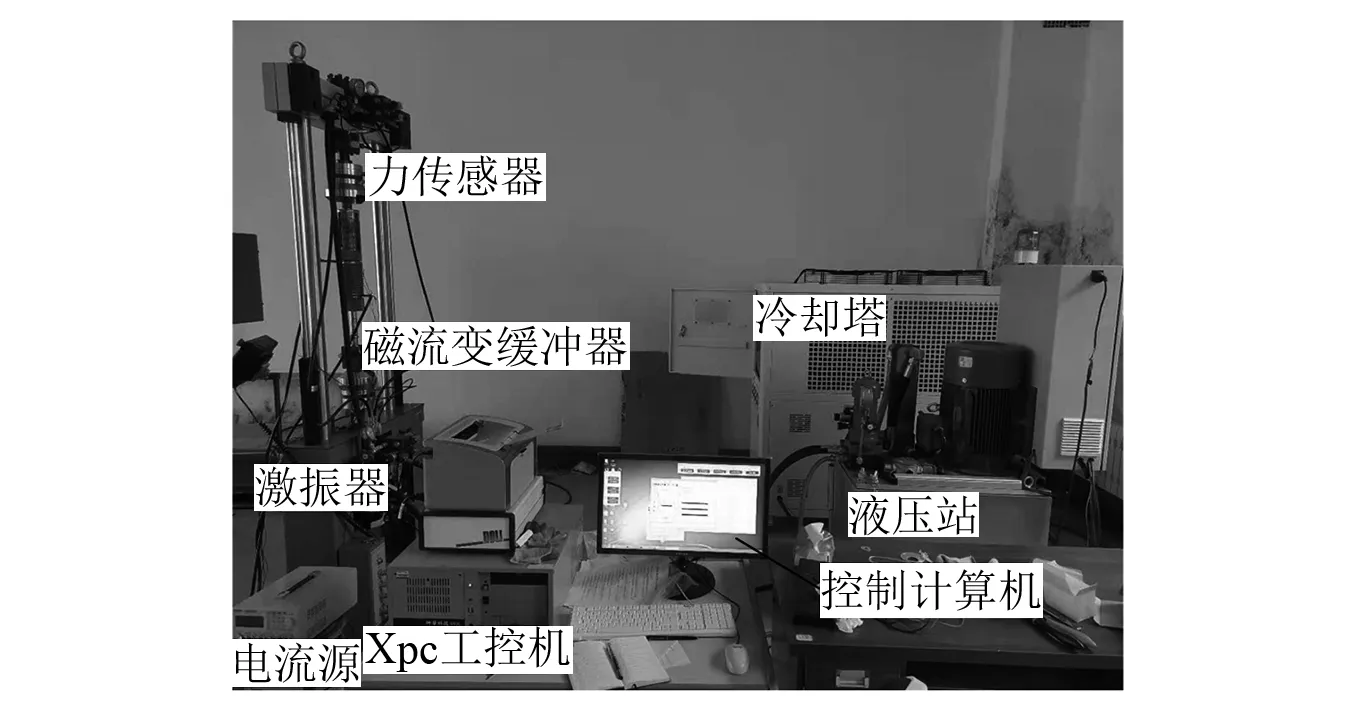
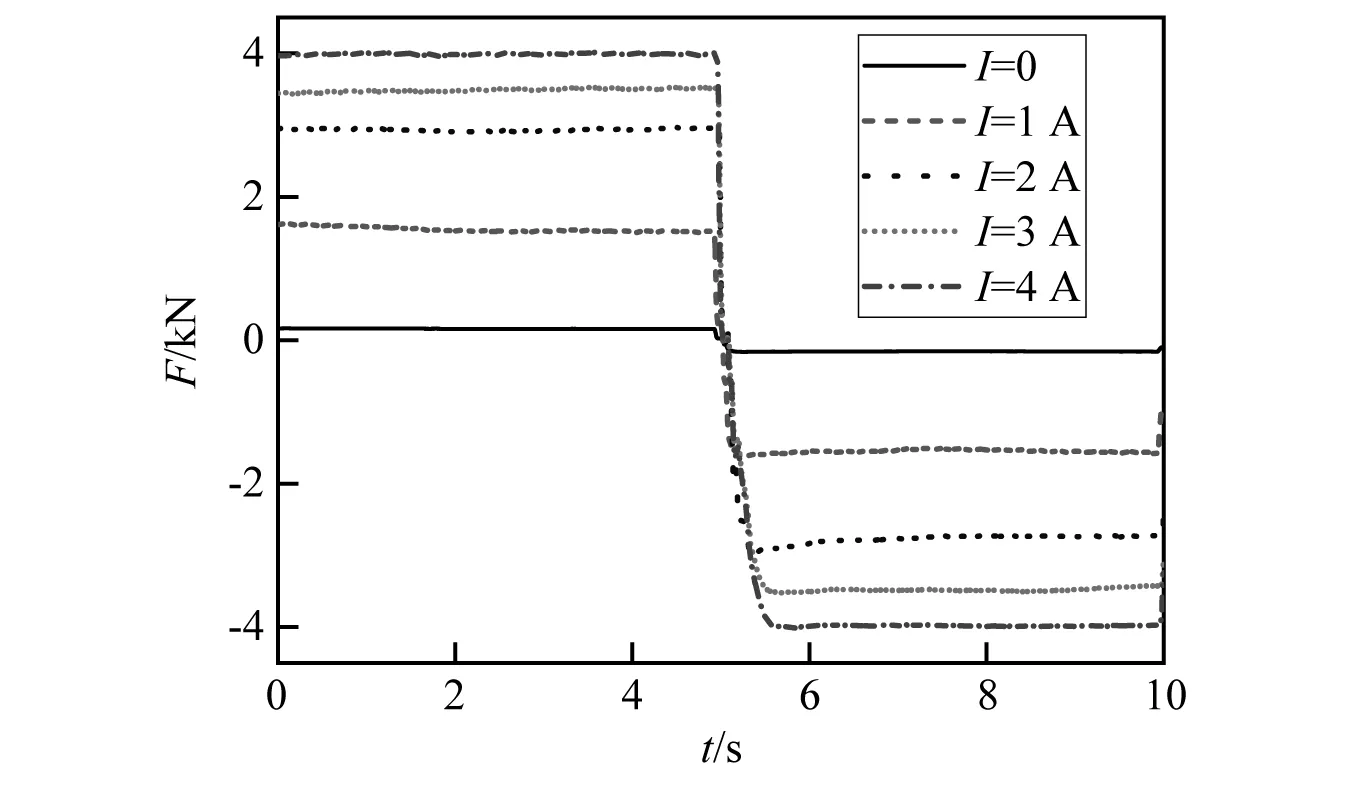
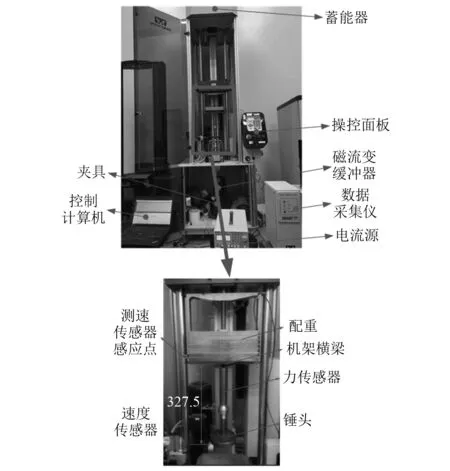
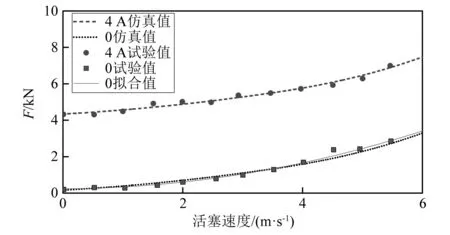
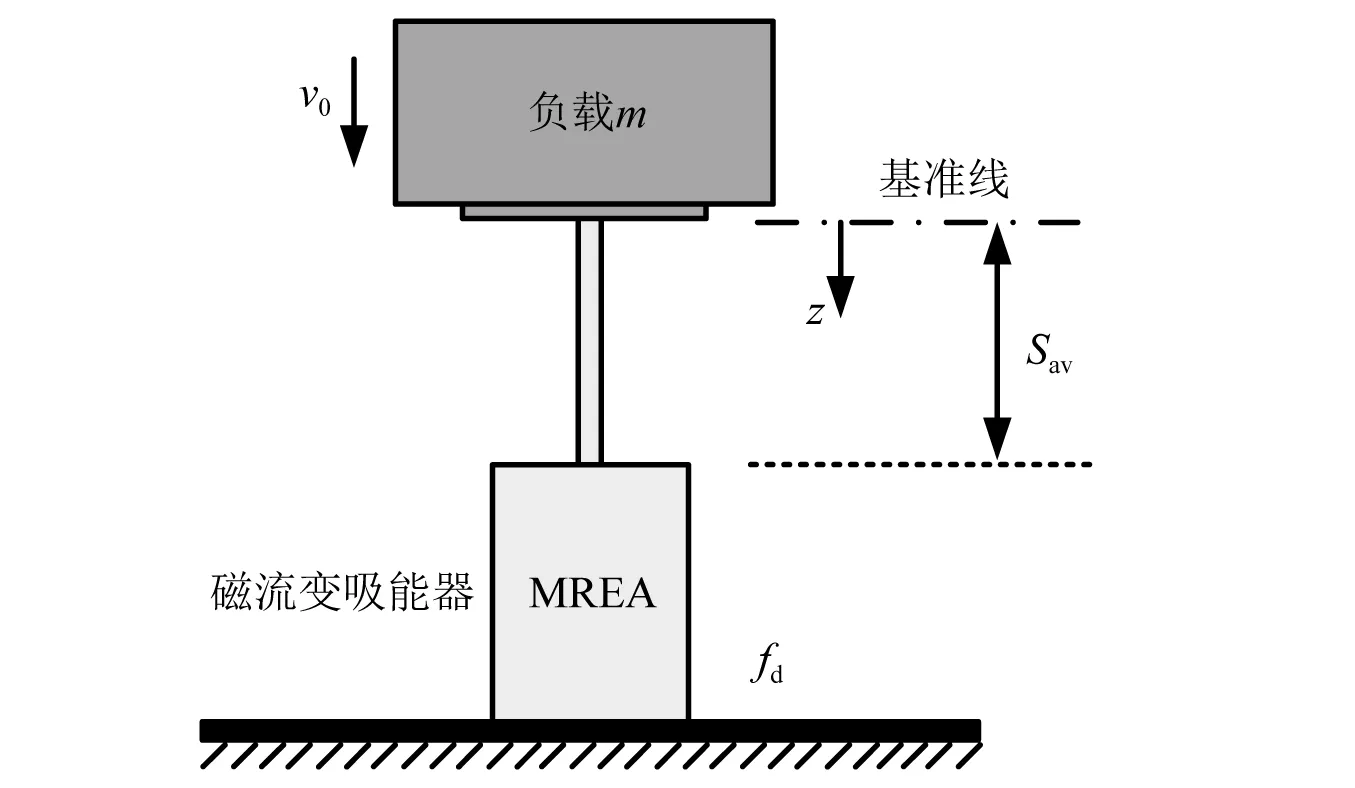
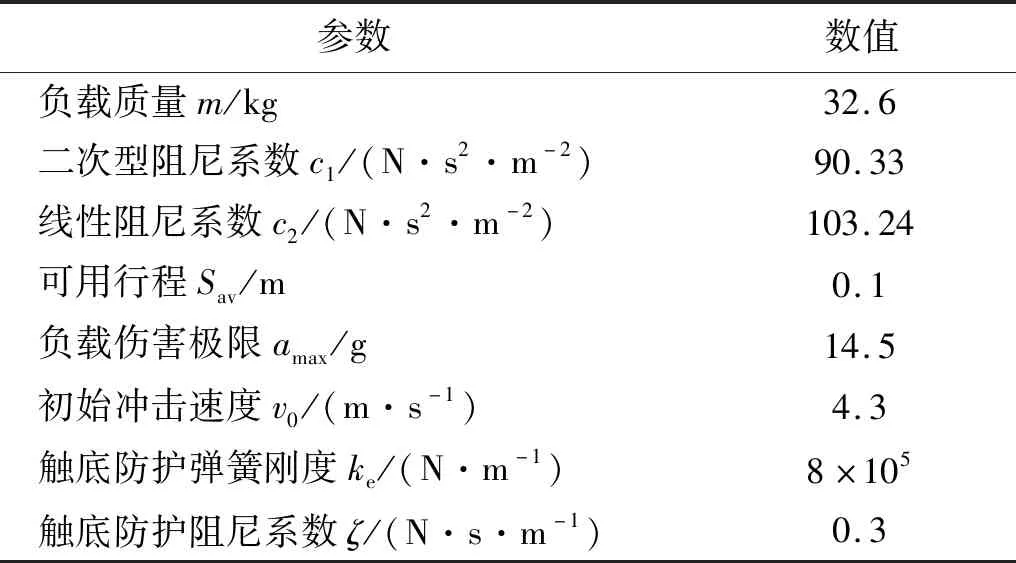
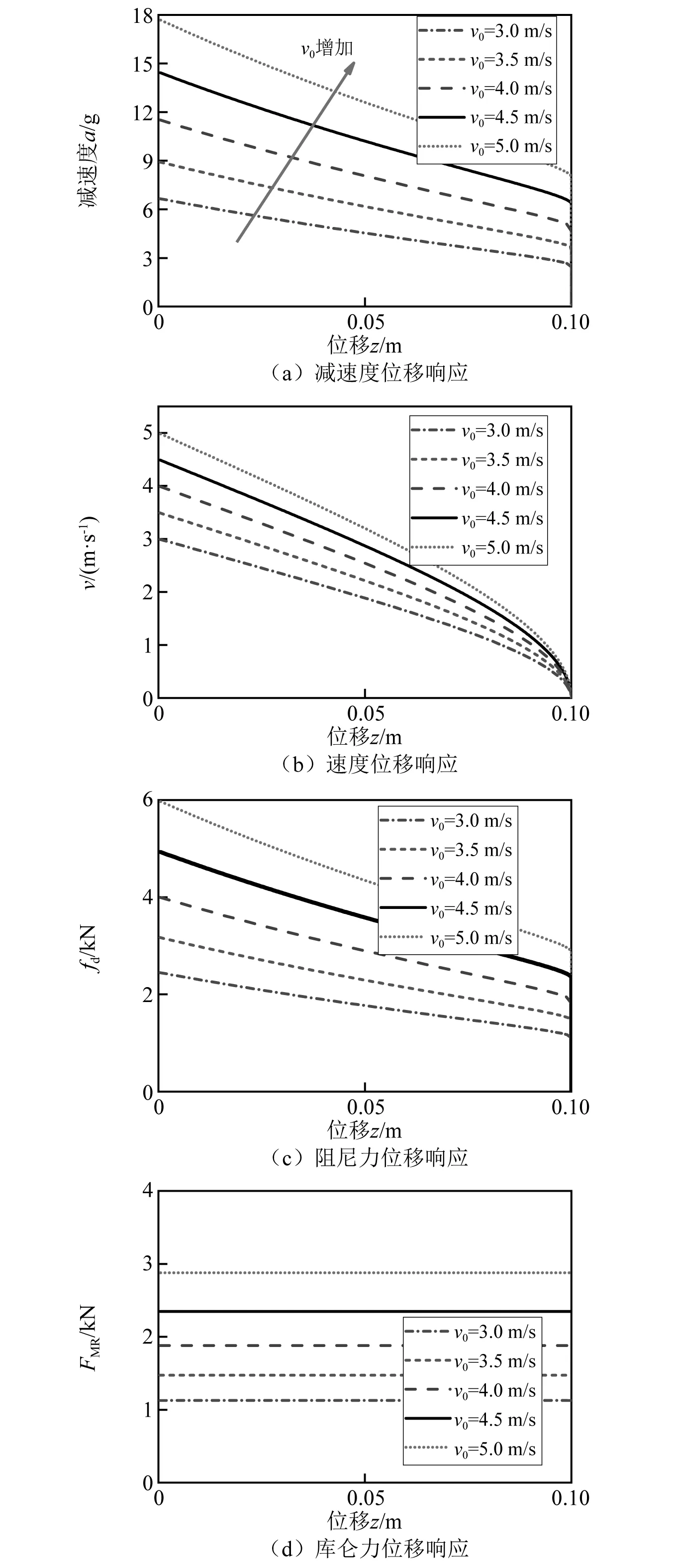
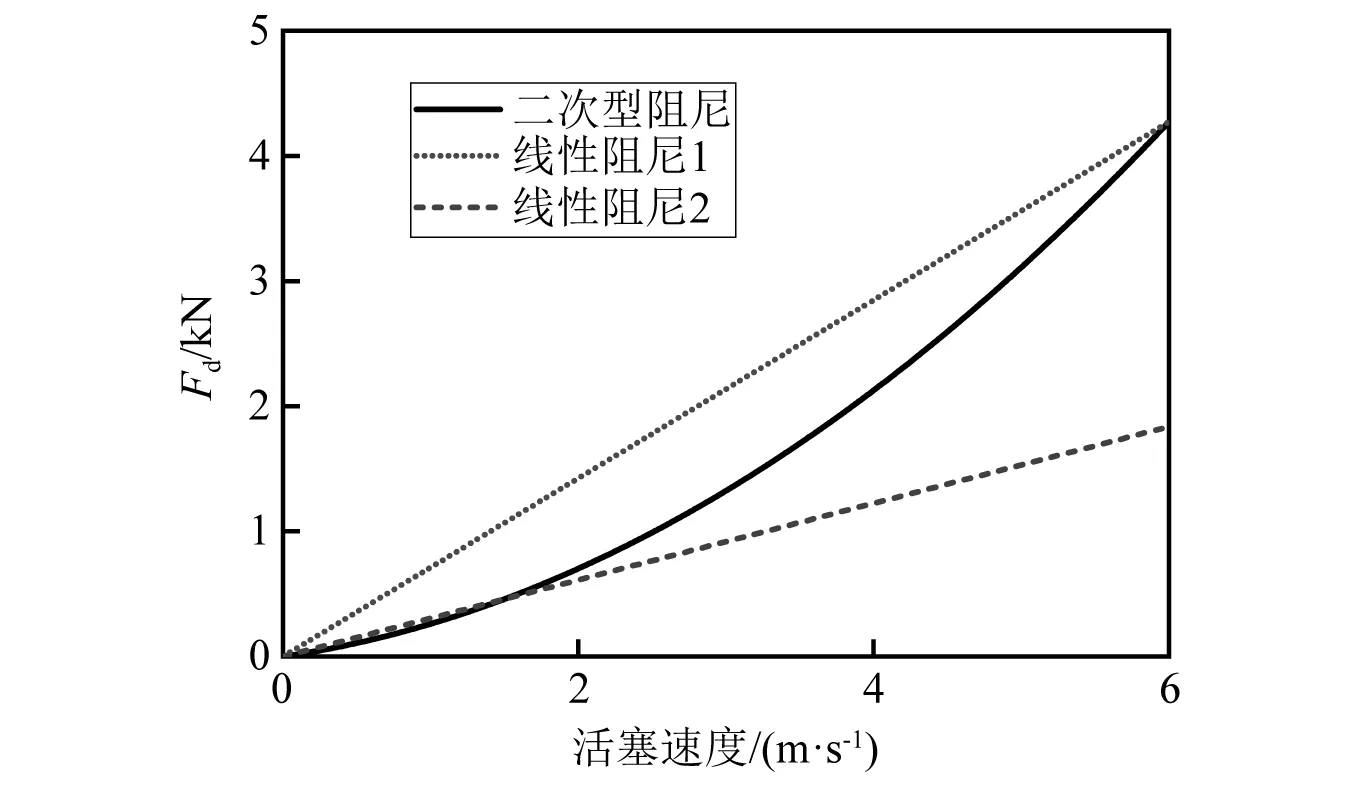
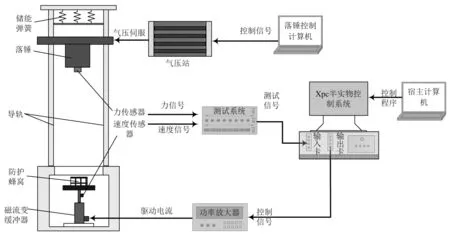
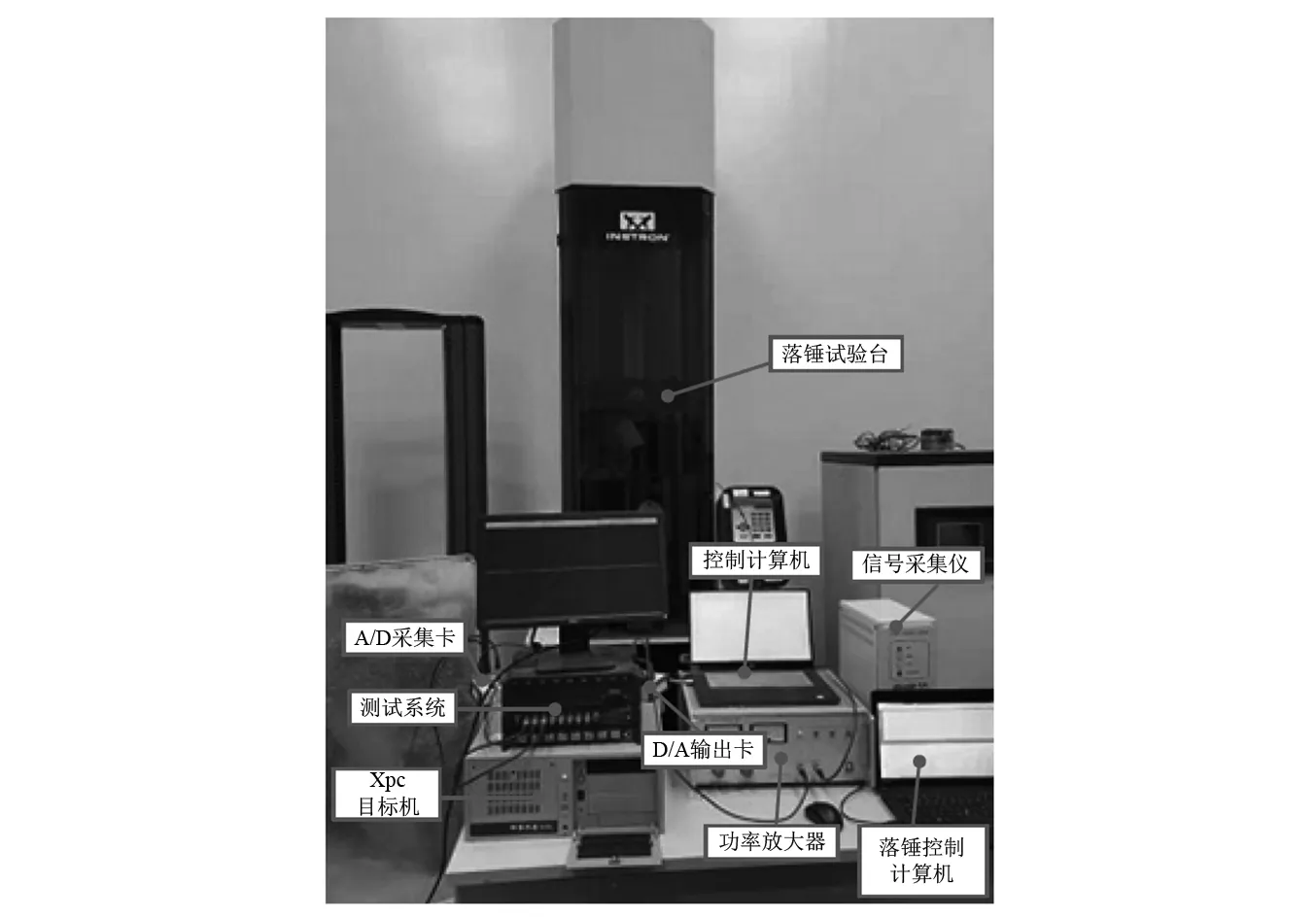
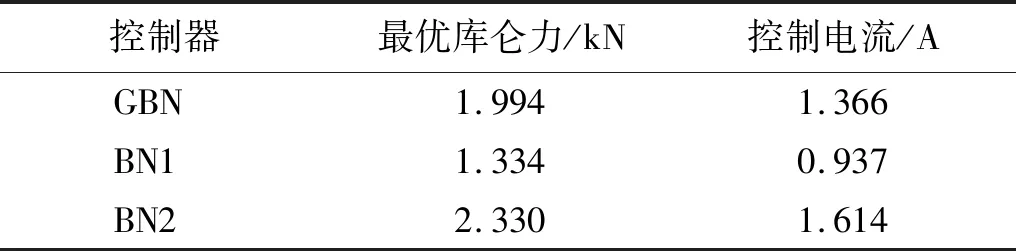
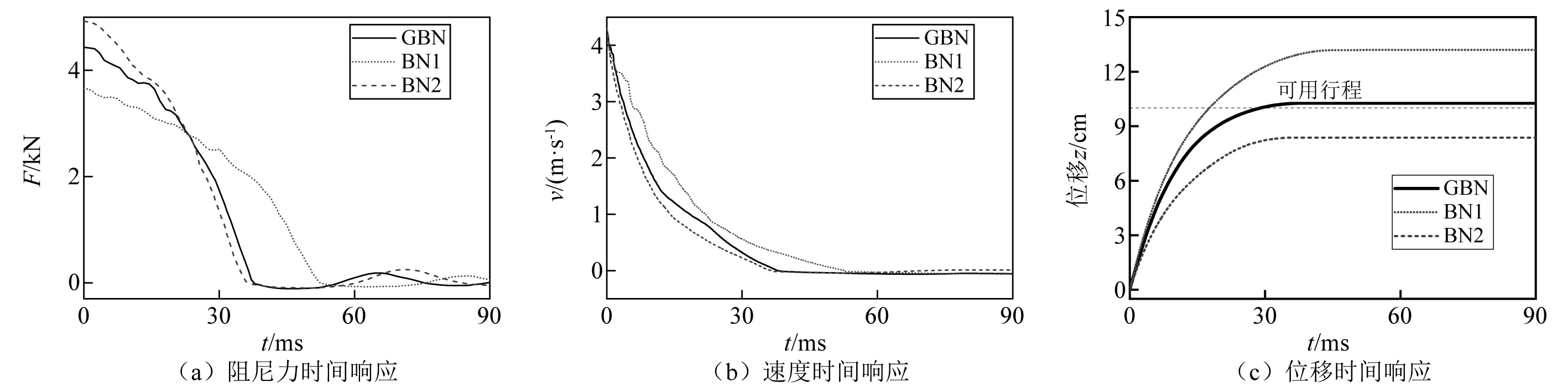
當環形間隙內液體雷諾數2 000 (7) 當磁流變緩沖器活塞運動速度較大,環形間隙內液體雷諾數Re>4 000時,環形間隙內磁流變液處于紊流狀態,此時達西摩擦因數應當滿足 (8) 磁流變緩沖器因局部水頭損失產生的壓降ΔPml也與環形間隙內液體流動狀態有關。在流體力學中局部水頭損失主要是由于通道的形狀和大小發生變化而產生的。本文磁流變緩沖器的局部水頭損失主要包括:區域1-2的通道入口效應產生的壓降ΔPml12、區域2-3通道突然擴張產生的壓降ΔPml23、區域3-4通道突然收縮產生的壓降ΔPml34、區域4-5通道突然擴張產生的壓降ΔPml45、區域5-6通道突然收縮產生的壓降ΔPml56、區域6-7通道出口效應產生的壓降ΔPml67。磁流變緩沖器的局部水頭損失壓降可以表示為 ΔPml=ΔPml12+ΔPml23+ΔPml34+ (9) 式中,各部分的壓降可以表示為 (10) 式中,KEN,KSE,KSC和KEX分別為環形間隙通道入口系數、通道突然擴張系數、通道突然收縮系數和通道出口系數。根據經驗公式,各系數可以表示為 (11) 式中,Ac為線圈間隙橫截面積,可以表示為Ac= 1.2.1 磁流變緩沖器的庫侖力測試 磁流變緩沖器的庫侖力測試試驗臺,如圖 3所示。試驗使用長春機械科學研究院生產的CRIMS電液伺服疲勞試驗機,利用配套的操作軟件DynaTestExpert來完成磁流變緩沖器激勵控制和數據采集。試驗機作動器最大位移為±27.5 mm,函數發生器頻率范圍為0.001~100 Hz,力傳感器的量程為1~10 kN。磁流變緩沖器的上下兩端通過疲勞試驗機的上下橫梁的夾頭安裝;通過液壓工作站對磁流變緩沖器進行激勵;力傳感器固定在上夾頭與上橫梁之間用于采集力信號;磁流變緩沖器通過電流源進行供電。 圖3 磁流變緩沖器阻尼力測試系統Fig.3 Damping force test system for MRSA 磁流變緩沖器的輸出力除了包括黏滯阻尼力Fv和庫侖力FMR之外,還包括緩沖器密封對活塞桿產生的摩擦力Fc。其中,黏滯阻尼力Fv與活塞速度有關,而庫侖力FMR和摩擦力Fc與活塞速度無關。為了準確測量磁流變緩沖器的摩擦力Fc和庫侖力FMR,磁流變緩沖器的活塞應該工作在較低的速度。因此,本試驗對磁流變緩沖器采用低頻三角波位移激勵。磁流變緩沖器在三角波位移激勵下的阻尼力響應,如圖4所示。三角波位移激勵的幅值為z=20 mm,頻率為f=0.05 Hz。在每1/4個周期內,活塞速度為v=4fz=0.004 m/s。在該激勵下,無外加電流(I=0)作用時,磁流變緩沖器輸出的阻尼力可以近似為摩擦力Fc。由圖 4可知,本文研制的磁流變緩沖器摩擦力為Fc=0.16 kN。圖4中同時給出了三角波激勵下磁流變緩沖器在不同外加電流下的阻尼力。當外加電流I=1 A時,磁流變緩沖器輸出的阻尼力為FMR=1.6 kN。隨著外加電流的增加,磁流變緩沖器輸出的阻尼力逐漸增加;當外加電流Imax=4 A時,磁流變緩沖器輸出的阻尼力可達FMR= 3.96 kN。 圖4 三角波激勵下的磁流變緩沖器的庫侖力Fig.4 The MRSA yield force characteristic under triangular excitation 在外加電流作用下,磁流變緩沖器的庫侖力FMR可以用磁流變緩沖器輸出的阻尼力F與摩擦力Fc的差值表示,即FMR=F-Fc。磁流變緩沖器輸出的庫侖力隨外加電流的變化情況,如圖5所示。試驗依舊采用三角位移激勵,幅值為20 mm,頻率為0.05 Hz。為了方便后續進行磁流變緩沖器控制方法的研究,現對庫侖力進行多項式擬合 FMR(I)=0.052I4-0.401 6I3+ (12) 磁流變緩沖器庫侖力的試驗值與擬合值的對比圖,如圖5所示。由圖5可知,式(12)的對磁流變緩沖器的庫侖力的擬合效果較好。 圖5 庫侖力與外加電流關系圖Fig.5 Yield force vs.applied current 1.2.2 高速沖擊激勵下的阻尼力特性 磁流變緩沖器高速落錘試驗測試系統,如圖6所示。圖6中落錘試驗機采用INSTRON公司提供的CEAST 9350標準落錘沖擊試驗機,該試驗機由落錘沖擊系統和數據采集系統組成。落錘沖擊系統的主體是落錘機架,包含錘頭、橫梁以及可以作為配重的附加質量。落錘機架的質量就是整個跌落質量,沖擊能量等于落錘機架與試件接觸時刻的動能。數據采集系統包括數據采集儀、速度傳感器和力傳感器。整個沖擊過程中的沖擊力和沖擊速度由力傳感器和速度傳感器實時記錄,并由數據采集系儀進行采集,由控制計算機記錄。 圖6 磁流變緩沖器高速落錘試驗測試系統Fig.6 MRSA high-speed drop hammer experiment set up 磁流變緩沖器在不同活塞速度下的阻尼力特性,如圖7所示。磁流變緩沖器阻尼力的仿真值由BPM模型計算得到。由圖7可知,BPM模型的仿真結果與試驗結果匹配較好,因此BPM模型可以準確地表示磁流變緩沖器的高速沖擊下的阻尼力特性。當磁流變緩沖器兩線圈通入4 A的電流,在相同活塞速度下磁流變緩沖器輸出的阻尼力較零場(0)下大得多。試驗中活塞最大速度為5.5 m/s。當活塞速度為5.5 m/s,通入4 A 電流時,磁流變緩沖器輸出的阻尼力可達6.99 kN,是零場下輸出阻尼力(2.85 kN)的2.45倍。 圖7 磁流變緩沖器阻尼力速度關系Fig.7 MRSA damping force vs.velocity 單自由度磁流變沖擊緩沖系統原理如圖8所示,以磁流變緩沖器活塞桿的初始位置為基準線,負載質量為m,負載初始沖擊速度為v0,方向向下為正,磁流變緩沖器可用行程為Sav。 圖8 單自由度磁流變沖擊緩沖系統原理圖Fig.8 Configuration of the shock mitigation system with an MRSA 基于磁流變緩沖器的單自由度沖擊緩沖系統的動力學方程為 (13) 初始條件可以表示為 (14) fd(t)=c1v2(t)+c2v(t)+fmr(t) (15) 將式(15)代入式(13),磁流變沖擊防護系統的動力學方程可以表示為 (16) 考慮二次型阻尼特性的磁流變沖擊緩沖系統的軟著陸控制目標是:尋找磁流變緩沖器輸出的最優庫侖力或者最優可控阻尼力。為了表示方便,磁流變緩沖器輸出的阻尼力可用量綱一化的參數——廣義賓漢數來表示;廣義賓漢數定義為可控阻尼力與二次型的零場阻尼力的比值 (17) 將式(16)中單自由度沖擊緩沖動力學方程表示為速度的形式,整理得 (18) (19) 對式(18)進行積分,并代入初始條件v(t=0)=v0,可得沖擊緩沖過程負載速度 (20) 進一步對式(20)進行積分,并代入初始條件z(t=0)=0,可得沖擊緩沖過程負載位移 (21) 為了實現軟著陸的控制目標,在沖擊緩沖結束時刻負載位移應該到達磁流變緩沖器可用行程,且負載速度降為0。假設總的沖擊緩沖時間為t0,在t=t0時刻,負載速度和位移分別為v(t=t0)=0,z(t=t0)=Sav。分別代入式(20)和式(21)可得 (22) (23) 系統的仿真參數如表 2所示,其中緩沖器參數由第1章落錘試驗測量得到。 表2 系統仿真參數Tab.2 The system parameters for simulation 圖9表示初始沖擊速度4.3 m/s下,考慮磁流變緩沖器二次型阻尼特性時磁流變沖擊緩沖系統在不同廣義賓漢數下的動態響應對比,負載質量為32.6 kg。對比的目的是為了揭露控制器輸出的最優賓漢數的控制效果優于其他賓漢數(Bi>Bi_o或者Bi 由式(22)和式(23)聯立計算求得最優廣義賓漢數Bi_o=0.9,此時磁流變緩沖器輸出的最優剪切阻尼力為2.15 kN。在最優廣義賓漢數下,如圖9(b)和圖9(c)所示在0.054 s,負載位移到達磁流變緩沖器的可用行程0.1 m,此時速度正好降為0,可以實現軟著陸的要求。 如式(17)所示,隨著廣義賓漢數的增加,磁流變緩沖器的可控阻尼力也隨之增加。當系統控制器輸出的廣義賓漢數大于其最優值(Bi>Bi_o)時,磁流變緩沖器輸出過大的阻尼力,系統處于過阻尼狀態。當系統控制器輸出的賓漢數Bi=1.5Bi_o時,此時由式(17)計算得磁流變緩沖器輸出的庫侖力為3.23 kN,大于最優廣義賓漢數下輸出的最優庫侖力(見圖9)。在過阻尼賓漢數的控制下,負載位移到達磁流變緩沖器0.073 m的行程處,磁流變緩沖器已經耗散完整個系統能量,負載速度降為0,無法實現軟著陸的要求。在這種情況下,因磁流變緩沖器輸出過大的阻尼力導致負載在沖擊緩沖開始階段的負載加速度高達16.6g,超過了最優廣義賓漢數控制下的13.2g,這將大大增加了負載的受損概率。 圖9 磁流變沖擊防護系統在不同廣義賓漢數下的響應Fig.9 The dynamic response of the MR shock mitigation system with different GBN 當系統控制器輸出的賓漢數小于其最優值(Bi 在不同初始沖擊速度下,沖擊緩沖系統在最優廣義賓漢數下的動態響應,如圖10所示。隨著沖擊緩沖的進行,負載處于減速狀態,負載速度逐漸減小,式(15)中磁流變緩沖器黏性阻尼力減小,負載減速度也隨之逐漸降低。由圖 10可知,隨著初始沖擊速度增加,系統動能增加,因此需要磁流變緩沖器輸出較大阻尼力來耗散系統能量,從而導致負載減速度也隨之增加(見圖10(a))。由圖10(b)可知,對于任意初始沖擊速度,磁流變沖擊緩沖系統在最優廣義賓漢數下,負載位移到達磁流變緩沖器可用行程0.1 m處,速度降為0,也就是說均可實現軟著陸的控制目標。 圖10 最優廣義賓漢數下,磁流變沖擊緩沖系統在不同初始沖擊速度的動態響應Fig.10 The dynamic response of drop-induced shock mitigation system at different initial drop velocities with optimal GBN Wereley等提出了線性賓漢數控制策略,該控制策略基于磁流變緩沖器的線性阻尼求得。對比分析磁流變緩沖器的線性模型和非線性模型,如圖11所示。由第1章分析可知,在高速沖擊下,磁流變緩沖器節流通道內液體流動狀態由層流轉為紊流,磁流變緩沖器的阻尼力急劇增加,此時阻尼力與速度特性曲線表現為二次型關系。為了明確分析線性和非線性阻尼模型的控制效果,圖11給出了2種線性阻尼模型的阻尼力隨活塞速度的變化曲線,2種線性阻尼系數分別為712.1 N·s/m和306.2 N·s/m。基于線性阻尼1、線性阻尼2最優賓漢數控制器分別計為BN1和BN2。 圖11 磁流變緩沖器的線性和非線性阻尼力特性對比Fig.11 Comparison of linear and nonlinear damping force characteristics of MRSA 單自由度沖擊緩沖系統在線性賓漢數和二次型廣義賓漢數下的動態響應,如圖12所示。當初始沖擊速度為4.3 m/s時,線性阻尼模型1的零場阻尼力大于實際零場阻尼力。這造成了由BN1輸出的庫侖力小于實際的最優值,系統處于欠阻尼狀態。在這種情況下,負載到達磁流變緩沖器的可用行程時負載存在非零的速度,出現觸底現象。在BN1下,負載到達磁流變緩沖器可用行程處仍保留有1.67 m/s的速度,引起防觸底彈簧-質量-阻尼工作,負載產生最大為22.7g的加速度,這會對負載造成傷害。 BN2控制器輸出的庫侖力大于實際的最優值,系統處于過阻尼狀態。在BN2控制下,負載位移到達0.09 m 處速度降為0,無法實現軟著陸的要求(見圖12(c))。 圖12 沖擊緩沖系統在不同控制器下的響應Fig.12 Dynamic response of shock mitigation system under different controller 對于線性系統求取的最優賓漢數作用于磁流變沖擊緩沖系統,受阻尼力模型的限制負載會出現觸底沖擊或者不能完全利用完磁流變緩沖器可用行程的現象。 為了驗證2.2節所設計的沖擊緩沖系統的廣義賓漢數控制策略的軟著陸效果,本章搭建落錘沖擊緩沖快速控制試驗平臺,開展磁流變沖擊緩沖系統半主動控制試驗研究。試驗平臺工作原理如圖13所示,試驗現場照片如圖14所示。 圖13 落錘沖擊緩沖快速控制試驗平臺原理圖Fig.13 The diagram of semi-active drop hammer shock mitigation for rapid control 圖14 落錘沖擊緩沖快速控制試驗平臺Fig.14 Semi-active drop hammer shock mitigation for rapid control experiment set up 試驗平臺的機械部分采用INSTRON公司提供的CEAST 9350落錘試驗機,緩沖器的安裝方式、試驗臺具體原理和操作步驟已在1.2節作出詳細介紹。本章所設計的試驗臺與落錘試驗的不同之處在于電控系統。落錘沖擊緩沖快速控制試驗平臺的電控系統包括:傳感器、控制計算機、Xpc實時控制系統、測試儀器以及為磁流變緩沖器供電的功率放大器。其中,Xpc實時控制系統是整個試驗臺控制系統的核心部件,包括:A/D采集卡、D/A輸出卡、目標計算機和宿主計算機。A/D采集卡選用美國NI公司生產的NI PCI-6259信號采集卡進行A/D轉換,將輸入的模擬信號轉化為數字信號。采用NI PCI-6733作為D/A轉換的輸出板卡,將輸出的數字信號轉換成模擬信號。選用研華610H工控機作為目標計算機,其主板自帶有多個ISA和PCI的插槽,該工控機可以與多種類型的控制卡和采集卡兼容。宿主計算機選用個人計算機即可,主要用于數據處理和程序調試。 試驗首先將參數代入二次型或線性控制程序,運行控制程序計算所需的庫侖力。隨后通過式(12)計算外加電流的值。在初速度為4.3 m/s時,通過控制程序分別計算GBN、BN1、BN2控制器的最優剪切屈服力實際控制中的最優庫侖力和控制電流,如表3所示。需要注意的是:本章仿真模型未考慮磁流變緩沖器摩擦力的影響,在實際控制中的最優剪切屈服力需要減去摩擦力,即 表3 實際控制中庫侖力和控制電流Tab.3 The optimal yield force and control current at real case fmr_r=fmr_t-ff (24) 式中:fmr_r為實際最優剪切屈服力;fmr_t為理論最優剪切屈服力;ff為磁流變緩沖器摩擦力。 基于磁流變緩沖器的沖擊防護系統控制效果,如圖15所示。在最優廣義賓漢數控制下,落錘在10.26 cm的行程處(稍微超出設定可用行程)速度減小至0,基本實現軟著陸的目標;對于BN1控制器,控制電流較小,其輸出的庫侖力過小,導致落錘在13.2 cm的行程處(超過設定的可用行程3.2 cm)停止下來,無法實現軟著陸的控制;對于BN2控制器,控制電流過大,其輸出的阻尼力也稍大一些,落錘在8.37 cm的行程處(設定可用行程的83.7%)速度減小至0。 圖15 線性賓漢數控制器與二次型廣義賓漢數控制器試驗結果對比Fig.15 Comparison of experimental results between linear Bingham number controller and quadratic generalized Bingham number controller (1) 基于二次型阻尼最優廣義賓漢數控制策略可以實現軟著陸的控制目標。而基于線性阻尼的最優賓漢數控制方法,受阻尼力模型的限制,負載會出現觸底沖擊或者不能完全利用完磁流變緩沖器可用行程的現象。 (2) 針對不同沖擊強度(不同負載質量和初始沖擊速度),最優廣義賓漢數控制策略可以實現軟著陸的控制目標。 (3) 在最優廣義賓漢數控制策略下,系統存在唯一的最優廣義賓漢數來實現軟著陸的控制目標。非最優廣義賓漢數將導致負載出現觸底沖擊或者不能完全利用完磁流變緩沖器可用行程的現象。
ΔPml45+ΔPml56+ΔPml67
1.2 試驗測試
0.778 1I2+1.029 9I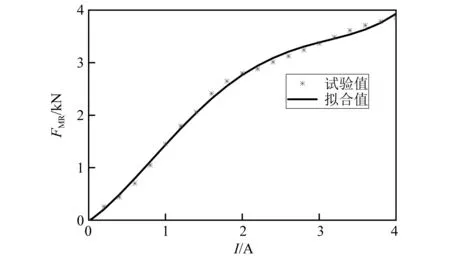

2 磁流變沖擊防護系統的最優廣義賓漢數控制
2.1 磁流變沖擊防護系統的動力學方程

2.2 最優廣義賓漢數控制



3 仿真結果

4 線性賓漢數與二次型廣義賓漢數控制效果對比

5 試驗研究
6 結 論
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30北京測繪(2020年12期)2020-12-29 01:33:58裝備制造技術(2019年12期)2019-12-25 03:06:46制造技術與機床(2019年10期)2019-10-26 02:47:06中國洗滌用品工業(2019年4期)2019-05-11 09:27:34鐵道通信信號(2018年5期)2018-06-28 03:06:24家庭影院技術(2017年9期)2017-09-26 03:41:45知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19通信電源技術(2016年6期)2016-04-20 06:21:32
