大型礦用電鏟控制框架設計
2022-08-26 03:03:40王夢麟張天賜郭云飛岳海峰宋學官
機電產品開發與創新 2022年4期
王夢麟, 付 濤, 張天賜, 郭云飛, 岳海峰, 孫 剛, 宋學官
(1.大連理工大學 機械工程學院, 遼寧 大連116024;2.太原重工股份有限公司 礦山采掘裝備及智能制造國家重點實驗室, 山西 太原030024)
0 引言
大型礦用電鏟作為重型機械, 在露天采礦業具有十分廣泛的應用,是礦產資源露天開采中的關鍵設備[1]。但是直到目前為止,礦用電鏟設備一直處于人工操作階段[2-3],導致礦產挖掘能耗較高,挖掘效率低,不同駕駛員之間對礦山環境及電鏟自身結構的感知不同, 因而操作差異較大,導致電鏟的壽命較低。 而通過大量的研究表明,針對礦山的不同堆料形貌,能夠規劃出一條滿足較高滿斗率、最低單位能耗、較高效率的最優挖掘軌跡,因此如何保證規劃軌跡的執行至關重要[4]。
一些國內外企業和研究機構針對礦用電鏟的自動化控制方面已經取得了一些成果。 徐工集團研發出了一款無人駕駛室遙控挖掘機XE15R,對液壓、電力、機械等系統進行操控,有效提高了挖掘的效率和可靠性[5]。 韓國的Seo 等開發了一種具有電鏟熟練駕駛員經驗并根據識別的現場堆料情況來挑選最優挖掘方案規劃器的自動挖掘系統,能夠實現無人操作[6]。 澳大利亞的Dunbabin 和Corke搭建了智能電鏟實驗樣機, 開發了一種電鏟自動循環挖掘系統,實現了自動挖掘,滿斗率監測以及自動裝載等功能[7]。 國內外對電鏟自動化與智能化的研究大多處于電氣系統改造及針對特定簡單場景的小型樣機階段。 因此,本文設計了一種針對實際礦山環境和真實電鏟模型的自動控制框架, 并在由真實礦山物料搭建的環境中使用1∶7縮比例試驗樣機驗證了該系統的可行性。
1 礦用電鏟實驗平臺控制系統硬件設計
大型礦用電鏟作為一種復雜的重型工程機械, 挖掘作業需要各個機構的協同運作,為了能夠在真機WK-55電鏟上有更好的作業效果, 同時降低前期進行智能化作業實驗成本, 保證設備及人員的安全性, 提高實驗的效率, 設計制造了礦用電鏟WK55 1∶7 的縮比例試驗樣機,見圖1。

圖1 電鏟實驗樣機
電鏟實驗平臺下位機控制系統采用“PLC+基礎變頻傳動”的電氣控制系統,見圖2,以PLC 為核心,連接4 個變頻器。 其中變頻器1 控制回轉電機, 采用轉矩控制方式,負責在電鏟挖掘完成后進行電鏟回轉動作,尋找合適的卸料位置。變頻器4 控制開斗電機,也是采用轉矩控制方式,負責在鏟斗回轉到礦卡合適位置時進行開斗卸料。變頻器2 控制提升電機和右行走電機, 變頻器3 控制推壓電機和左行走電機, 左行走電機和右行走電機配合電機內部自帶編碼器采用位置控制, 完成電鏟的長距離行走,轉向以及電鏟與料堆相對位置的微調,提升電機和推壓電機采用的是速度控制方式, 負責執行上位機規劃的最優挖掘軌跡, 并且提升電機和推壓電機都外接一個絕對值編碼器,測量電機的轉速并反饋到PLC 中,用于比較規劃軌跡與執行軌跡, 便于采取措施加強挖掘軌跡的跟蹤。 此外,由于推壓機構的特殊性,當推壓距離超過齒條的長度時,則會造成斗桿的脫離齒條墜落,因此在推壓機構利用編碼器測量到的位置信息設置前后限位來避免事故發生。

圖2 電鏟電氣控制系統
電鏟試驗樣機的行走、挖掘、回轉、卸料等動作由6個三相異步電動機控制, 為此設計了一個以西門子1517PLC 為核心的電氣控制柜,見圖3。 圖中1 為西門子PLC 及其功能拓展模塊, 用于編寫和執行電機的各種控制程序,包括速度控制,轉矩控制,位置控制等,將電機控制指令以模擬量或者西門子控制報文的方式輸出,傳遞給變頻器, 并且可以采集變頻器和電機編碼器等反饋的信號。2 為變頻器控制單元, 用于接收PLC的電機控制指令, 調整電機控制參數, 實現電機控制方式的切換, 并且能夠實現電機的閉環控制,完成挖掘軌跡跟蹤。 3 為整流器模塊,把交流電用二極管電整成直流電。 4 為逆變器模塊,把直流電通過半導體、變壓器等元件轉變成交流電,負責給各個不同型號的電機供電。

圖3 電鏟電氣控制柜
2 上位機總體架構
基于C++搭建了軟件控制系統, 所搭建的控制系統分為4 層結構,自下而上依次是硬件層、驅動層、任務層和交互層,架構示意圖見圖4。 硬件層包括硬件控制系統和執行機構,主要有智能控制系統、運動執行機構、外部感知系統等;驅動層包括硬件采集與軟件通信協議,主要有數據采集、IO 控制、設備監控、接口通信等;任務層的任務是數據管理,主要包括數據傳輸、數據處理、文件管理等;交互層的任務是人機交互控制,主要有參數配置、操作模式選擇,界面顯示等。

圖4 控制系統整體架構
3 上位機軟件調試界面
為了更好地進行礦用電鏟的自動化調試工作, 用Qt跨平臺編寫了上位機人機交互界面,見圖5。 完成電鏟挖掘流程分步調試功能, 主要包括操作模式選擇、 行走操作、點云識別處理、軌跡規劃、數據傳輸、一鍵挖掘、回轉復位等。
在分步調試界面中可以進行電鏟本地模式和自動模式選擇,如圖5 中①所示,選擇本地模式則是電鏟的手動操作,由駕駛員使用原有操作桿來完成電鏟的挖掘過程,選擇自動模式后, 可在②進行電鏟挖掘模式或者行走模式的選擇,在進行模式切換時需要先進行抱閘,切換完成后再進行松閘。 電鏟模式及電機的實時狀態可以在③中實時顯示出來,便于調試者觀察。速度模式勾選決定著回轉時回轉電機的控制方式, 由于人工操作時轉矩控制能夠避免沖擊,能夠適當微調轉過角度,但是在自動模式下回轉過程是一次性完成, 對比轉矩控制方式與速度控制方式,規劃后的速度控制能夠使轉過的角度更加精確,沖擊也相對較小。④是軌跡規劃相關按鈕,激光雷達對電鏟狀態、點云信息進行初始化讀取,上位機規劃出最優挖掘軌跡,將軌跡傳輸到下位機PLC 中,并對PLC 發送挖掘執行命令,完成挖掘操作,最后將PLC 采集到實際挖掘數據、電鏟姿態、電機狀態寫入到文件中。 ⑤用來顯示軌跡狀態以及所規劃軌跡的性能指標。 ⑥主要顯示礦產在整個挖掘流程中的姿態信息, 主要包括提升距離、 推壓距離、回轉角度及斗桿傾角。⑦主要是電鏟姿態調整的參數輸入,根據輸入的參數,根據正轉選項來選擇方向,點擊回轉按鈕,會規劃對應的回轉速度數組,并傳遞給下位機同時向下位機傳遞回轉開始命令,電鏟開始回轉運動。同時子線程“讀取回轉狀態”開始讀取電鏟回轉完成狀態。而轉矩正轉與反轉對轉矩矩模式下電鏟轉動操作, 長距離行走按鈕控制電鏟行走操作, 在這里只能進行前進或者后退。此外,急停按鈕按下會給推壓提升回轉電機的速度同時賦0, 使得設備運動停止, 給設備狀態賦值急停時,不能直接再次啟動,點擊恢復按鈕后,電鏟狀態從急停態恢復至工作態,可以再次啟動運行。

圖5 分步調試界面
4 上下位機通信
在上位機開發中,PLC 與上位機的穩定通信是關鍵,上下位機通信主要用到了基于以太網的PLC 通信的開源庫Snap7 與經常應用在不同主機之間的Socket 通信兩種方式,見圖6。
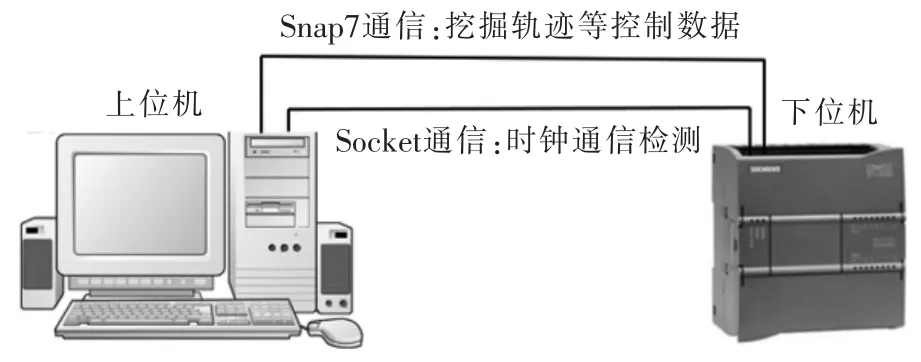
圖6 上下位機通信
Snap7 通信靈活性高,穩定性好,通用性強,在Snap7通信中主要用到函數包括IP 通信連接、讀取DB 塊數據、寫入DB 塊數據等,完成挖掘軌跡、停止、執行等各類數據的交換。數據傳輸的過程中,難免出現信號不穩定甚至中斷的情況, 因此采用socket 通信方式來對通信質量進行監測。 上位機會觸發一個定時器通過socket 通信定時發送一系列通信診斷數據, 下位機會根據一定時間內接收的數據信息判別通信質量并傳遞到上位機, 在人機交互界面通信質量處進行顯示, 若通信質量較差時會重新進行連接操作。
5 下位機控制及驗證
在下位機搭建好PLC、變頻器、電機等硬件系統后,在PLC 中編寫了下位機電機控制程序。 以挖掘程序為例,首先PLC 的數據存儲區接收到上位機發送來最優挖掘軌跡速度數組和數組中數據的數量, 然后再收到挖掘開始命令, 通過速度數組的下標再配合接通延時器以一定的時間間隔讀取規劃的速度數據,通過生成0-10V 的模擬量,傳送給變頻器,進而進行控制。 通過在電鏟試驗樣機進行挖掘實驗測試可知,在下位機控制中,電鏟的行走和回轉控制受到外界環境因素影響較小, 而挖掘過程中電鏟由于挖掘模型的不確定性,實際工況條件惡劣,挖掘阻力較大,造成規劃軌跡與實際挖掘軌跡有較大偏差的問題。
西門子S120 變頻器初次驅動電機時需要將電機參數輸入到變頻器中進行電機識別, 并建立新電機的數學模型,加強對電機特性的控制,保證了電機的精確控制和安全運行。另外,為了實現對最優挖掘軌跡的實時跟蹤控制,采用PID 控制算法,控制效果較好,行業內應用范圍廣,能夠滿足要求。
PID 控制系統框架見圖7,通過改變控制參數能夠實現控制輸入的目的,控制的規律為

圖7 PID 系統框圖

PLC 通過讀取斗桿推壓電機絕對值編碼器和提升電機絕對值編碼器數值, 并通過A/D 轉換和計算后得到推壓電機和提升電機的實際執行轉速, 作為PID 控制的反饋,在變頻器內部應用PID 控制,可以根據需要選擇自整定方法確定最佳的PID 調節參數,實現理想的調節控制,能夠滿足大多數系統要求。
通過電鏟樣機挖掘實驗,見圖8,計算鏟斗中物料體積,得出實際挖掘的滿斗率約為90%,與規劃得到的滿斗率96.8%相比,誤差在10%以內,考慮到在實際挖掘過程中塊狀物料會有部分溢出無法全部進入鏟斗, 導致滿斗率偏低。通過規劃轉速與電機實際轉速對比,見圖9,其中(a)和(b)是根據實際挖掘堆料面規劃出的最優挖掘軌跡,挖掘物料面時實際執行轉速幾乎能夠跟蹤規劃轉速,誤差在5%以內,3~7s 時間段內推壓電機轉速存在一定波動, 因為鏟斗在切入料堆的過程中在斗桿伸長的方向上挖掘阻力較大。 此外,無論是提升電機還是推壓電機在挖掘開始與結束時刻存在一定誤差, 主要是考慮到人工操作時存在誤觸,在設計PLC 程序時增加了閾值保護功能,當給予電機的指令速度小于50r/min 時,電機不執行。
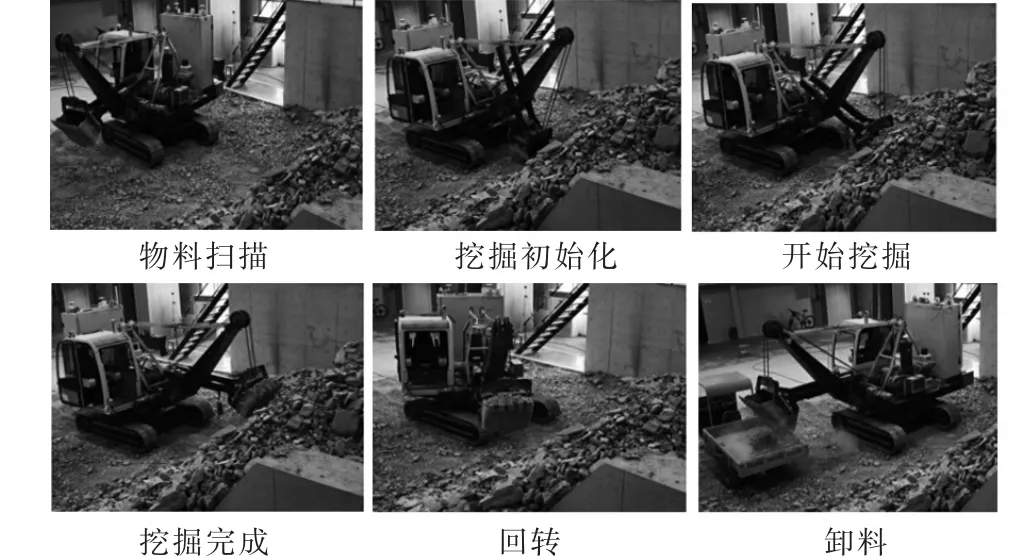
圖8 挖掘實驗流程

圖9 挖掘實驗結果對比
6 結論
開發了面向智能礦用電鏟的軟、硬件控制系統,搭建了以PLC+基礎變頻傳動的電氣控制系統, 完成行走、挖掘、卸料、復位等基礎挖掘流程;建立了上下位機通信,實現了控制命令、 應用數據的傳遞以及通信監測等功能;并且基于Qt 初步搭建了上位機人機交互界面,實現了模式轉換、參數輸入、分步調試、狀態顯示和急停恢復等功能;利用基于真實礦山物料搭建實驗場地和電鏟實驗平臺對上述功能進行挖掘作業測試, 實驗結果表明,縮比樣機可以完成電鏟整體挖掘流程, 軌跡跟蹤誤差小,滿斗率與規劃結果相近,為后續電鏟的無人化奠定基礎。
猜你喜歡
防爆電機(2020年3期)2020-11-06 09:07:42
公民與法治(2020年11期)2020-07-25 02:02:06
測控技術(2018年5期)2018-12-09 09:04:50
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
電子制作(2017年7期)2017-06-05 09:36:13
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41
中國工程咨詢(2016年4期)2016-02-14 07:28:28
自動化博覽(2014年12期)2014-02-28 22:34:39