一種改進(jìn)的機(jī)器人視覺(jué)點(diǎn)云手眼標(biāo)定方法
2022-08-26 03:03:32劉明賀邢運(yùn)隆
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2022年4期
劉明賀, 邢運(yùn)隆
(沈陽(yáng)建筑大學(xué) 機(jī)械工程學(xué)院, 遼寧 沈陽(yáng) 110168)
0 引言
在現(xiàn)代工業(yè)發(fā)展進(jìn)程中,由于機(jī)械臂通用性強(qiáng),柔性強(qiáng),自動(dòng)化程度高等優(yōu)點(diǎn),并且在高精加工領(lǐng)域的作用日益顯著,其在工業(yè)發(fā)展中的應(yīng)用和需求日益增高,工業(yè)機(jī)器人的自動(dòng)化加工必將成為未來(lái)工業(yè)發(fā)展的主導(dǎo)[1-3]。 解決工業(yè)機(jī)械臂手眼關(guān)系的精度問(wèn)題成為推動(dòng)機(jī)器人高精度應(yīng)用的關(guān)鍵一步[4-6]。
解決機(jī)器人手眼關(guān)系一直是智能加工的重要課題,Larsson S[7]提出3D 激光掃描儀與機(jī)械臂協(xié)同工作,為解決復(fù)雜工件的掃描任務(wù)提出了一種快速、高效、易操作的方案。 Roger Y[8]提出了將標(biāo)定物固定在工作空間,驅(qū)動(dòng)機(jī)械臂以不同空間位置對(duì)其掃描的方法, 得到初步手眼關(guān)系,用解矩陣方程組問(wèn)題代替手眼標(biāo)定問(wèn)題。 用奇異值分解法求解相關(guān)矩陣[9-10],再用卡爾曼濾波法[11]以及非線性最優(yōu)化[12]方法等。
李永泉等[13]基于環(huán)路增量法,設(shè)計(jì)了平面兩個(gè)自由度的并聯(lián)機(jī)器人標(biāo)定模型, 建立了一種新型的標(biāo)定實(shí)驗(yàn)靶板和相機(jī)針孔模型,多次迭代完成標(biāo)定。 許國(guó)樹等[14]基于光束法平差(BA)處理微運(yùn)動(dòng)圖像序列。 基于MDH 參數(shù)的矩陣標(biāo)定方法對(duì)噪聲敏感,穩(wěn)定性一般。Feng 等[15]將機(jī)械臂與相機(jī)掃描儀視作一個(gè)整體, 因忽視手眼標(biāo)定的系統(tǒng)性誤差,故難以達(dá)到高精度要求。 Wang 等[16]采用紙質(zhì)棋盤、鏡子雙目測(cè)量系統(tǒng)完成全自動(dòng)手眼全自動(dòng)標(biāo)定法。陳寶存等[17]基于ROS 操作平臺(tái)完成了機(jī)械臂驅(qū)動(dòng)、空間規(guī)劃、圖像分析和標(biāo)定求解等功能。 Ren 等[18]首次采用靶球作為掃描對(duì)象, 通過(guò)改變機(jī)械臂的位姿變化得到多組數(shù)據(jù)計(jì)算可得到各個(gè)坐標(biāo)系之間的空間位置關(guān)系。
本文提出了一種改進(jìn)的基于視覺(jué)點(diǎn)云的手眼關(guān)系測(cè)定方法。 基于機(jī)器人運(yùn)動(dòng)學(xué)模型得到初始的手眼關(guān)系矩陣;然后使用標(biāo)定球作為標(biāo)定參照物,結(jié)合標(biāo)定球心約束同時(shí)標(biāo)定機(jī)器人運(yùn)動(dòng)學(xué)結(jié)構(gòu)參數(shù)誤差和手眼關(guān)系誤差,最終實(shí)現(xiàn)機(jī)器人結(jié)構(gòu)參數(shù)的準(zhǔn)確更新并得到更精準(zhǔn)的手眼關(guān)系。 實(shí)驗(yàn)采用UR10 機(jī)械臂作為實(shí)驗(yàn)平臺(tái),使用ArgusTools,CloudCompare 和GeomagicStudio 等軟件對(duì)Eyein-Hand 手眼系統(tǒng)進(jìn)行實(shí)驗(yàn),對(duì)標(biāo)定球進(jìn)行掃描,完成圖像和數(shù)據(jù)的采集和處理, 擬合出標(biāo)定球得到球心坐標(biāo)信息, 再用激光跟蹤儀完成驗(yàn)證實(shí)驗(yàn)進(jìn)一步提高了本方案的科學(xué)性和有效性。
1 標(biāo)定過(guò)程
1.1 設(shè)備及對(duì)應(yīng)坐標(biāo)系
整個(gè)實(shí)驗(yàn)設(shè)備見圖1,本文設(shè)計(jì)了一套Eye-in-Hand手眼標(biāo)定系統(tǒng),將掃描儀,即相機(jī)固定在機(jī)械臂末端的法蘭盤上,等離子槍即“手”也固定在法蘭盤上,其中的測(cè)量系統(tǒng)的坐標(biāo)系包括:整個(gè)實(shí)驗(yàn)平臺(tái)的基坐標(biāo)系記為FB,末端法蘭盤坐標(biāo)系記為FM,相機(jī)坐標(biāo)系記為FC,目標(biāo)物坐標(biāo)系記為FW,手坐標(biāo)系記為FH,相機(jī)掃描得到的球心坐標(biāo)PC與基坐標(biāo)系下球心坐標(biāo)PB有如式(1)的關(guān)系:

圖1 實(shí)驗(yàn)設(shè)備Fig.1 Experiment apparatus

圖2 機(jī)器人初位置Fig.2 The initial position of the robot


1.2 手眼關(guān)系初步標(biāo)定
為得到準(zhǔn)確的手眼關(guān)系, 就是要實(shí)現(xiàn)相機(jī)坐標(biāo)系和手坐標(biāo)系在工作空間中的準(zhǔn)確轉(zhuǎn)換。 本文通過(guò)驅(qū)動(dòng)機(jī)械臂帶動(dòng)相機(jī)對(duì)空間某一固定點(diǎn)進(jìn)行多次變位姿測(cè)量,再用最小二乘法計(jì)算,得到初步手眼關(guān)系。
由式(1)可知,工作空間中點(diǎn)PB=[XB,YB,ZB]T與在相機(jī)坐標(biāo)系下的坐標(biāo)PC=[XC,YC,ZC]T,滿足以下關(guān)系:
將式(1)展開得
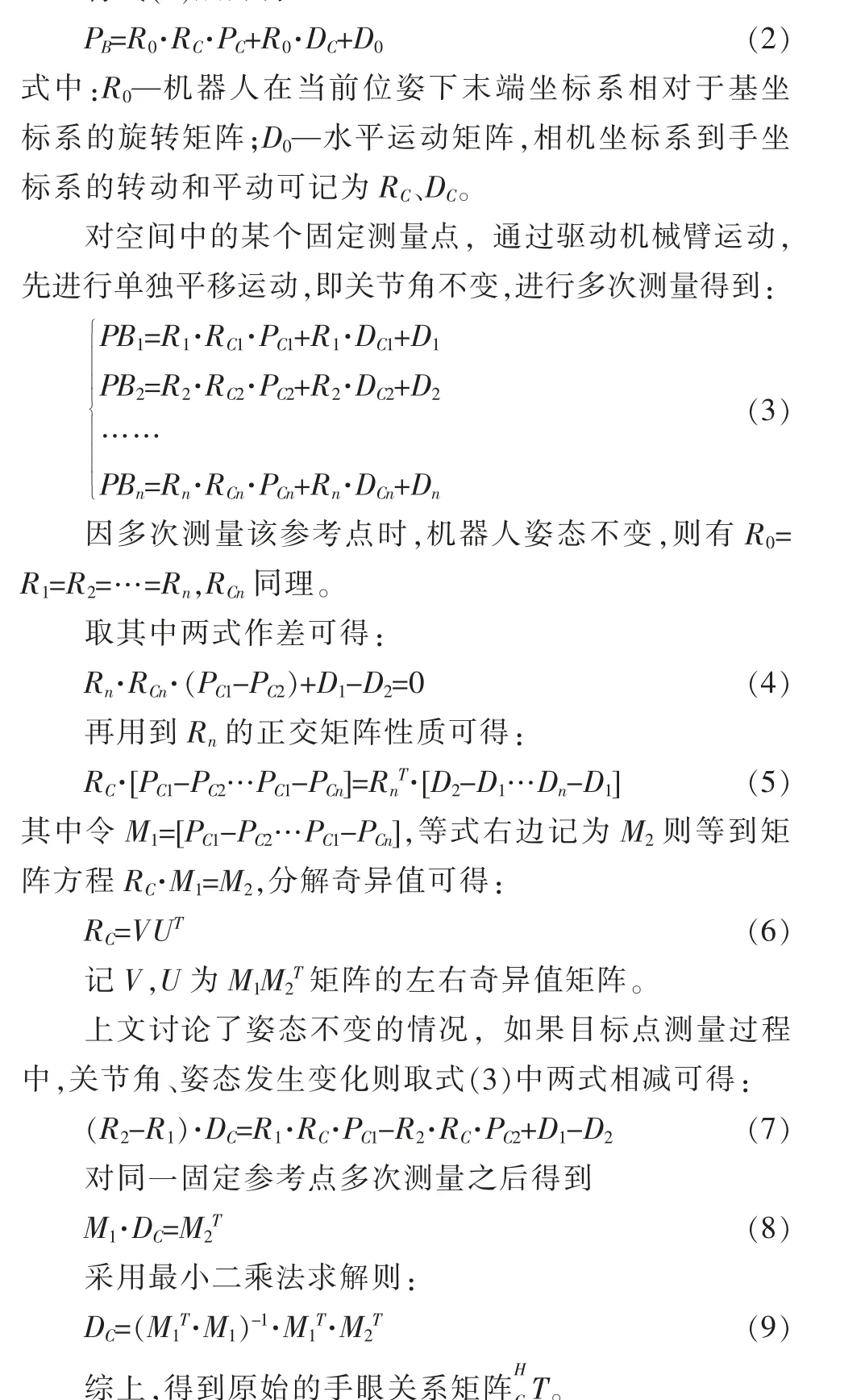
本文以標(biāo)定球的球心作為標(biāo)定點(diǎn), 初步的手眼關(guān)系標(biāo)定方法較為簡(jiǎn)單,易于操作、計(jì)算,也對(duì)復(fù)雜的計(jì)算過(guò)程以及方程組問(wèn)題進(jìn)行了簡(jiǎn)化和優(yōu)化計(jì)算。 同時(shí)使用控制器控制UR10 機(jī)械臂單一平動(dòng)和轉(zhuǎn)動(dòng)都非常方便準(zhǔn)確,復(fù)合運(yùn)動(dòng)的精度也尚可,故可以快速得到初始的相機(jī)和手之間的關(guān)系矩陣即手眼關(guān)系。 但該算法通過(guò)機(jī)器人運(yùn)動(dòng)學(xué)模型計(jì)算機(jī)器人的手的位姿, 與實(shí)際手的位姿必然存在系統(tǒng)誤差和其他偏差, 且控制機(jī)器人平動(dòng)時(shí)產(chǎn)生的微小震動(dòng)所引起的誤差也不能忽略, 因此下一步就著手于改正手眼關(guān)系誤差以及機(jī)器人運(yùn)動(dòng)學(xué)結(jié)構(gòu)參數(shù)誤差,從而得到更精準(zhǔn)的手眼關(guān)系矩陣。
1.3 誤差修正
為提升手眼關(guān)系矩陣的精度,采用如下方法:由式(1)得機(jī)械臂在不同空間位姿下測(cè)得的球心理論位置記為:


為了進(jìn)一步優(yōu)化流程,得到更準(zhǔn)確的手眼關(guān)系,采用圖3 所示的流程進(jìn)行計(jì)算。綜合考慮系統(tǒng)誤差和結(jié)構(gòu)參數(shù)誤差,如機(jī)械臂重復(fù)定位精度誤差, 絕對(duì)定位精度誤差,相機(jī)的掃描精度誤差,球心的計(jì)算精度等。

圖3 標(biāo)定流程圖Fig.3 Calibration flow chart
可根據(jù)不同精度需求選取合適的誤差閾值,在迭代過(guò)程中當(dāng)滿足標(biāo)定誤差小于閾值時(shí),完成標(biāo)定,完成誤差修正和參數(shù)補(bǔ)償。
2 實(shí)驗(yàn)及結(jié)果分析
2.1 相機(jī)掃描原理
相機(jī)掃描半徑為R 的球面, 在相機(jī)坐標(biāo)系下記掃描平面為X=0,經(jīng)過(guò)點(diǎn)云處理和最小二乘擬合得到半徑為r的圓弧。 其中圓心在相機(jī)坐標(biāo)系下的坐標(biāo)PO1=(XO1,YO1,ZO1)。圓心O1和球心PO2=(XO2,YO2,ZO2)滿足以下關(guān)系:XO2=XO1±φ, 圓和球在Y,Z 方向量均相等即YO2=YO1,ZO2=ZO1,其中:φ=(R2-r2)1/2。
將標(biāo)定球固定在如圖4 所示的位置,展開實(shí)驗(yàn),多次移動(dòng)機(jī)械臂以不同角度不同高度, 完成相機(jī)對(duì)標(biāo)定球的掃描工作。

圖4 標(biāo)定球固定位置Fig.4 Fixed position of calibration ball
2.2 實(shí)驗(yàn)過(guò)程
相機(jī)與計(jì)算機(jī)連接后,打開CloudCompare 軟件并保持運(yùn)行穩(wěn)定,在不同角度掃描標(biāo)定球,保存圖像見圖5。

圖5 圖像采集Fig.5 Image Acquisition
在使用Argus Tools 軟件處理圖像,得到如圖6 所示的標(biāo)定球和標(biāo)定板的掃描圖像。

圖6 相機(jī)掃描結(jié)果Fig.6 Camera scan results
之后使用Geomagic Studio 軟件將多余點(diǎn)云刪除,保留標(biāo)定球點(diǎn)云信息,見圖7。

圖7 標(biāo)定球點(diǎn)云Fig.7 Points cloud of calibration sphere
最后用CloudCompare 軟件打開已修改好文件格式,并處理完好的點(diǎn)云,進(jìn)行球心擬合見圖8,圖9,重復(fù)以上操作得到每次在不同位置拍照所測(cè)量的標(biāo)定球球心坐標(biāo),進(jìn)行記錄。

圖8 處理點(diǎn)云Fig.8 Process points cloud
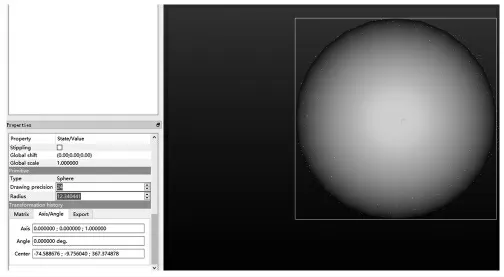
圖9 擬合球心坐標(biāo)Fig.9 Fit sphere center coordinates
2.3 結(jié)果分析
在機(jī)器人運(yùn)動(dòng)空間中布置標(biāo)定球,用控制器控制機(jī)械臂的平動(dòng)和關(guān)節(jié)轉(zhuǎn)動(dòng),用相機(jī)對(duì)標(biāo)準(zhǔn)球進(jìn)行掃描,計(jì)算球心位置坐標(biāo)。 通過(guò)機(jī)械臂的轉(zhuǎn)動(dòng)數(shù)據(jù)按式(6)求解得出RC,通過(guò)平動(dòng)數(shù)據(jù)式(9)計(jì)算DC,得到初步手眼關(guān)系矩陣:

對(duì)空間中一固定球, 在不同角度掃描測(cè)量球心距離時(shí),其理論值應(yīng)為零。 由于誤差存在,標(biāo)定前后每個(gè)標(biāo)定球位置測(cè)量的球心距見圖10 所示。 球心距誤差的平均值從1.6119mm 降低到0.3435mm, 球心距誤差的標(biāo)準(zhǔn)差由0.4963mm 降低到0.1834mm。

圖10 標(biāo)定球距離誤差Fig.10 Calibration ball distance error
3 對(duì)比驗(yàn)證
3.1 5球系統(tǒng)的驗(yàn)證
可采用如圖11 所示的5 球系統(tǒng)作為測(cè)量對(duì)象, 通過(guò)測(cè)出5 個(gè)球心坐標(biāo),5 球之間的相互距離與實(shí)際距離做對(duì)比。 可驗(yàn)證手眼關(guān)系更新后,測(cè)量的距離誤差的改變。

圖11 5 球系統(tǒng)Fig.11 5-ball system
通過(guò)測(cè)量標(biāo)定前后5 個(gè)標(biāo)定球任意兩球之間的的距離, 得出各球間的球心距誤差的平均值由1.6274mm 降低到0.3807mm,球心距誤差的標(biāo)準(zhǔn)差由0.3232mm 降低到0.1551mm。
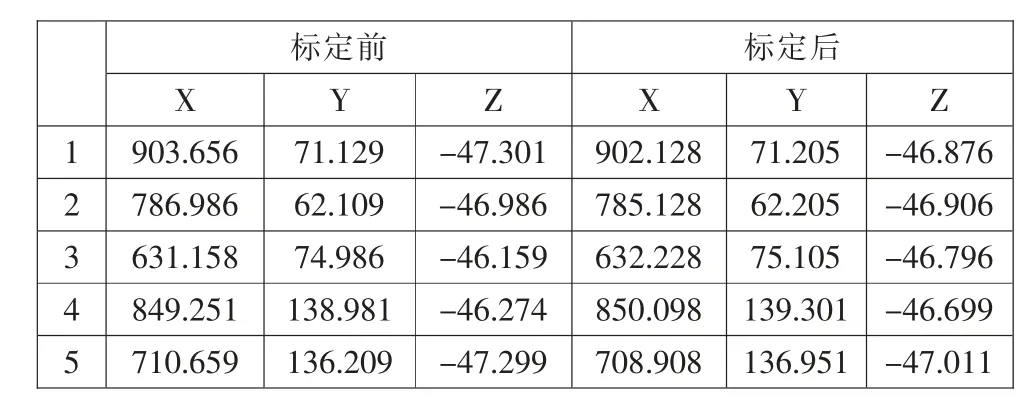
表1 五球球心數(shù)據(jù)Tab.1 Five ball center data
3.2 激光跟蹤儀驗(yàn)證
還可采用激光跟蹤儀對(duì)標(biāo)定后的手眼關(guān)系進(jìn)行進(jìn)一步驗(yàn)證,本實(shí)驗(yàn)采用Leica 960激光跟蹤儀,該設(shè)備以其精度高、效率高、實(shí)時(shí)跟蹤準(zhǔn)確、 便于裝卸、易于操作等優(yōu)點(diǎn)而被廣泛的應(yīng)用到工業(yè)測(cè)量中,測(cè)量待測(cè)點(diǎn)的空間三維坐標(biāo)。
激光跟蹤儀可測(cè)量動(dòng)靜態(tài)小球, 信號(hào)平行反射到跟蹤頭上。 把靶球固定在機(jī)械臂末端,當(dāng)靶球移動(dòng)時(shí),控制器發(fā)出信號(hào)自動(dòng)調(diào)整激光方向?qū)?zhǔn)靶球。 返回的測(cè)量激光與參考激光進(jìn)行干涉, 根據(jù)干涉的原理可以得出靶球到跟蹤頭的距離, 跟蹤頭兩個(gè)軸上的角度編碼器可以得到目標(biāo)位置相對(duì)于激光跟蹤頭的角度,有了距離和角度就可計(jì)算出測(cè)量點(diǎn)在激光跟蹤儀坐標(biāo)系下的空間位置坐標(biāo)。
控制機(jī)械臂運(yùn)動(dòng)在空間中隨機(jī)確定一個(gè)位姿,把此時(shí)靶球作為定點(diǎn)。則在隨機(jī)移動(dòng)或轉(zhuǎn)動(dòng)機(jī)械臂,記錄不同位姿下靶球的位置信息。以激光跟蹤儀測(cè)量的在兩個(gè)不同掃描位置下的球心距離作為理論值,對(duì)比參數(shù)補(bǔ)償前后的手眼關(guān)系與機(jī)器人運(yùn)動(dòng)學(xué)模型參數(shù),把不同坐標(biāo)系測(cè)量的球心距離作差,見圖13。 距離誤差的平均值由1.6771mm 降低到0.3398mm,標(biāo)準(zhǔn)差由0.3747mm 降低到0.1507mm。

圖12 5 球間距離誤差Fig.12 Distance error between 5 balls

圖13 靶球距離誤差Fig.13 Range error of target ball
4 結(jié)論
本文提出的這種改進(jìn)的機(jī)械臂手眼關(guān)系標(biāo)定方法, 基于視覺(jué)點(diǎn)云的優(yōu)化和圖像處理便于操作、 易于實(shí)現(xiàn),建立了機(jī)械臂結(jié)構(gòu)參數(shù)誤差和手眼關(guān)系誤差的誤差模型, 通過(guò)標(biāo)定多個(gè)運(yùn)動(dòng)參數(shù)和結(jié)構(gòu)參數(shù)提高了手眼關(guān)系的精度。 在UR10 工業(yè)機(jī)器人這個(gè)實(shí)驗(yàn)平臺(tái)上,將相機(jī)固定在機(jī)械臂末端法蘭盤上,構(gòu)建了Eyein-Hand 實(shí)驗(yàn)系統(tǒng),采用相機(jī)掃描標(biāo)定球擬合出球心坐標(biāo)。標(biāo)定前后測(cè)量距離的標(biāo)準(zhǔn)差由0.4963mm 降低到0.1834mm。標(biāo)定后的手眼系統(tǒng),相機(jī)掃描和測(cè)量的精度得到很大提升。
猜你喜歡
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
電腦報(bào)(2019年40期)2019-09-10 07:22:44
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
科技知識(shí)動(dòng)漫(2016年8期)2016-07-29 20:40:09
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21