基于Amesim 的并聯機構反解模塊研究
2022-08-26 03:03:32葉曉帥
機電產品開發與創新 2022年4期
關鍵詞:模型
李 京, 葉曉帥, 費 燁
(1.沈陽建筑大學 機械工程學院, 遼寧 沈陽 110168; 2.杭州國辰正域科技有限公司, 浙江 杭州 311200)
0 引言
機械系統運動學和控制理論是計算機建模仿真的關鍵, 通常使用專業的仿真軟件完成所需要的建模與仿真分析。 西門子公司的AMESim 是一個面向專業人士的物理系統仿真平臺。 它以圖標的形式表示仿真系統中各個元件之間的關系,不僅可以傳遞元件之間的負載受力,還可以反映出系統中能量的流動[1]。在AMESim 仿真過程中,子模型的一個接口能傳輸多個變量,所以可將不同類型的子模型連接在一起,極大的簡化仿真模型結構[2]。
AMESim 中的模型庫雖然很龐大,但是并非包羅萬象,對于一些特殊的設計并沒有對性的模塊, 或者只能搭建出近似的等效模型。為了更好的仿真出實際的運動情況,最優方案是制作一個相應的子模型, 并將實際控制的數學模型和函數應用到子模型中。 尤其對于一些復雜的控制模型,往往只能選擇Matlab 聯合仿真的方法,使仿真模型更為復雜,仿真參數更加難以調試。
本文在AMESim 中利用軟件新功能Submodel Editor完成六自由度并聯機構反解模塊的制作, 實現了在AMESim 軟件內部完成較為復雜的控制。
1 反解的幾何原理
在實際設備調試過程中, 控制六自由度并聯機構的運動時, 并不是直接且單獨給每一個運動支鏈設定一個桿長值,從而控制平臺的運動。 是給出平臺在中位時相對空間中需要移動的位移以及角度, 控制系統再將對應的位移和角度轉換為每個支鏈的桿長值。 若有相應的軌跡規劃,則在運動過程中不停的下發相應的軌跡點指令。
在AMESim 仿真中亦是如此,給每一個支鏈下發對應的桿長值固然可行,也失去了仿真的意義,所以在六自由度并聯機構中需要完善相應的控制反解模塊。 為了更合理的制作相應的反解模塊,將對其中反解的算法進行梳理。設計為動平臺在下,實現平臺的調姿;靜平臺在上,靜平臺與大地固定。
圖1 為動平臺和靜平臺的坐標及鉸點的示意圖。靜平臺坐標系原點O’位于上平臺中心,動平臺的坐標系原點O 為于下平臺中心。其中,Bi為靜平臺各個鉸點位置,Bi所在圓為靜平臺鉸點圓;Pi為動平臺各個鉸點位置,Pi所在圓為動平臺鉸點圓。

圖1 動靜平臺坐標系圖[3]
在靜平臺及動平臺其上分別固聯坐標系B-xyz與P-xyz。 動平臺的空間姿態分別用參數a、b、c、α、β、γ表達。 a、b、c 是動平臺坐標系原點O 在靜平臺坐標系中的表示,α、β、γ 是繞X’、Y’、Z’三根軸的順序轉角。
1.1 平移變換[4]
如已知在動平臺P 上的點Pi, 它在另一平面E 上的變換V 表示為V=RPi,其中R 為4×4 變換矩陣,Pi和V 為列向量,動平臺P 到E 的變換是:E=PR-1,其中R-1為R的逆陣,P 和E 為平面行向量。
用向量h=ai+bj+ck 進行平移,其相應的H 變換矩陣是:

1.2 旋轉變換[4]
如圖2,己知在平面P 上點u,繞x,y,z 軸旋轉一個α、β、γ 角的相應變換是:
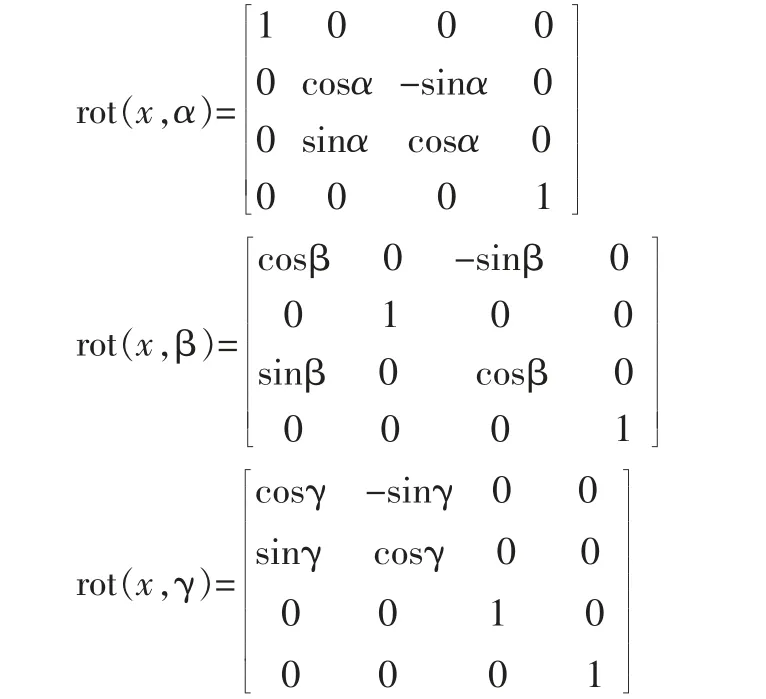

圖2 坐標旋轉變換示意圖
2 運動學反解
由于視覺識別系統獲得的是對接管道與目標管道相差的姿態,即動平臺坐標中心的平移和角度,也就是獲得了目標平面位置的情況。如圖3 為已知目標位置的坐標旋轉示意圖。
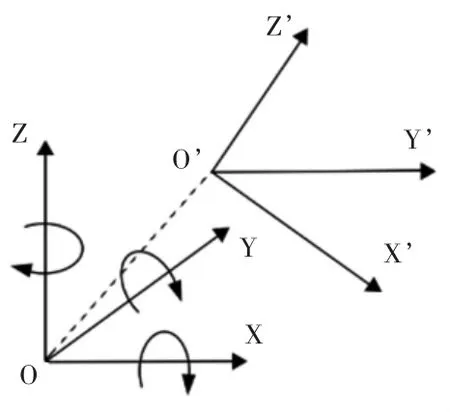
圖3 已知目標位置的坐標旋轉示意圖
動平臺依次靜平臺坐標系旋轉α、β、γ;動平臺原點O 移動a、b、c。
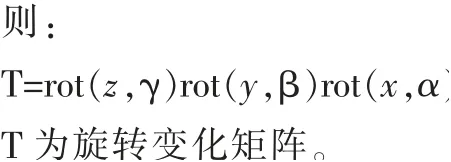
2.1 變化矩陣

2.2 各支鏈長度變化
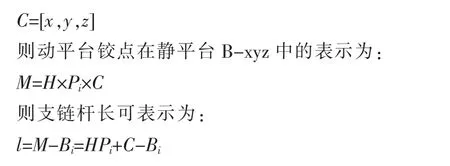
Pi為動平臺P-xyz 上的鉸點,Bi為靜平臺B-xyz 上的鉸點。 設動平臺坐標系原點的空間位置在靜平臺坐標系中的表示為:
3 反解模塊的制作
反解模塊的制作首先需要一個圖標, 在軟件的icon designer 中設計相應的圖標及需要使用的端口,并保存為svg 格式。 由反解過程可知, 對于模型外部需要12 個接口, 分別是笛卡爾坐標系下6 個自由度的輸入和經過反解后對應于六自由度平臺6 個支鏈位移的輸出。 接著將繪制的圖標導入為component(元件),這樣就可以在AMESim 草圖界面的元件庫中找到這個模塊,由于反解模塊屬于控制信號的模塊,故導入時的parent category(父類)到signal(信號)庫中。
由反解算法可知, 反解除了12 個輸入輸出變量外,還需要對平臺的鉸點進行定義。 這里采用極坐標的方式對鉸點進行定義,可以減少變量的數量,所以平臺常量參數主要有5 個:動平臺鉸點形成的圓的半徑、靜平臺鉸點形成的圓的半徑、動平臺鉸點間的夾角、靜平臺鉸點間的夾角,兩個鉸點圓平面在運動初始位置時的距離。整理得到反解模塊對應的參數表,見表1,表2。

表1 反解模塊變量表
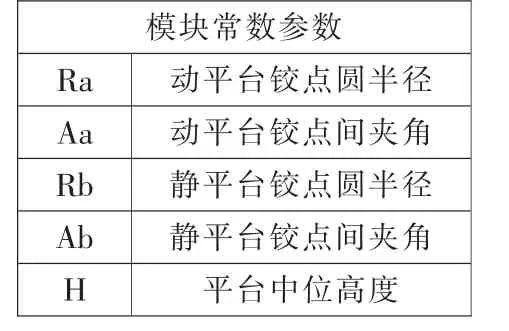
表2 反解模塊常量表
打開Submodel Editor 主程序的界面參數設置框見圖4。

圖4 參數定義框界面
其中Ports(端口)對應的是表1 中的6 個輸入變量和6 個輸出變量,計算過程所需的中間變量在internal variable, 平臺常數參數的定義在real parameters。 以支鏈1 輸出位移端口為例,對各個變量及參數進行定義:數據類型、名稱、單位、初始值等。 參數設置示例見圖6。
設置好所有的變量及參數后, 進入到Submodel code 界面, 此時關于參數的部分定義已經在軟件的幫助下編寫完成,主要完成單位轉換和算法,算法部分用C 語言編寫,并不支持矩陣的計算,可通過角標定義矩陣內各個元素,角標定義矩陣T 示意見圖6。

圖6 T 矩陣的角標定義示意
可通過嵌套雙層循環對二維矩陣進行運算,見圖7。
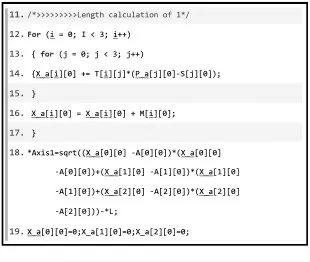
圖7 矩陣的計算示意
將上節算法轉化為C 語言編寫完成后保存, 軟件會對整個子模型進行檢查, 等待完成彈窗即說明制作完成。
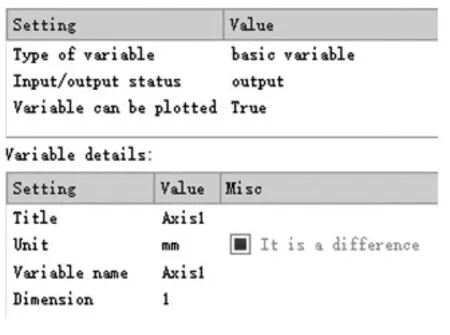
圖5 支鏈1 的參數定義
4 反解模塊的驗證
反解模塊的驗證路線為,在反解模塊中輸入指定的姿態值,解算得到六個支鏈的桿長變化曲線,將相應的桿長值或桿長變化曲線作為目標值輸入到六自由度并聯機構試驗樣機中, 再由試驗樣機的上安裝的航姿參考系統來檢測動平臺姿態的變化。 航姿參考系統安裝在動平臺的運動中心處。 航姿參考系統是為飛機提供準確可靠的姿態和導航信息的重要儀器,如橫滾、俯仰和航向[5]。
4.1 定點運動驗證
定點仿真姿態:x=0mm,y=0mm,z=0mm,Rx=-10°,Ry=10°,Rz=0°。
將試驗樣機的平臺參數輸入到反解模塊中,并設置定點運動工況的姿態值。反解模塊解算得到六個支鏈的桿長值,見圖8。
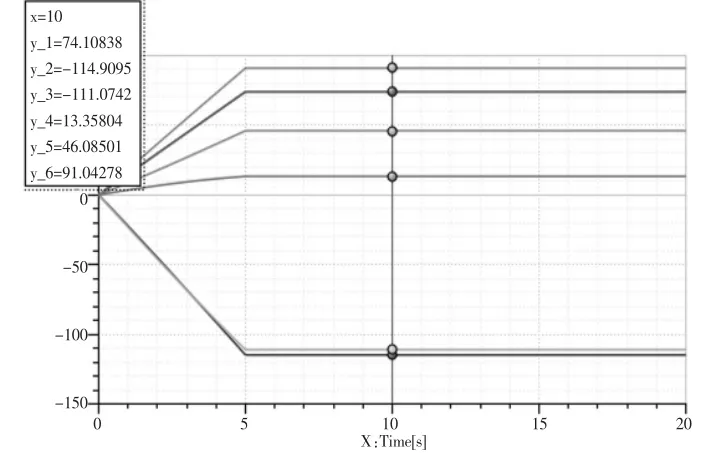
圖8 軟件內反解模塊計算得到的桿長值
可獲得反解模塊解算得到的桿長值:Axis1=74.108mm,Axis2=-114.910,Axis3=-111.074,Axis4=13.358,Axis5=46.085,Axis6=91.043。
將支鏈位移輸入到試驗樣機中,采集航姿儀數據,見圖9。

圖9 航姿儀測得Rx、Ry 方向旋轉角
穩定后數據:Rx=10.41°、Ry=9.53°,最大誤差為4.9%,在誤差范圍內,反解模塊定點運動解算正確,此處包含平臺運動誤差和航姿儀的測量誤差。
4.2 連續運動驗證
連續運動工況:取X 方向幅值A=100mm,周期T=5s和Z 方向A=100mm,T=5s 的復合正弦運動。
反解解算得到六個支鏈的桿長變化值見圖10。
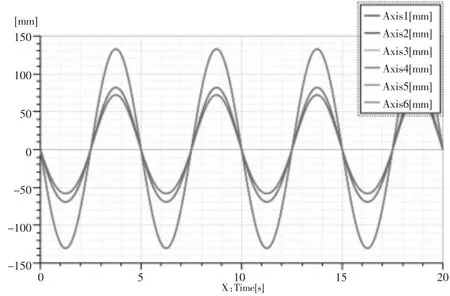
圖10 連續運動下六個支鏈桿長變化曲線圖
將六個支鏈的桿長曲線輸入到試驗樣機中, 取航姿儀中x 和z 方向的姿態曲線。 圖11 為反解模塊連續運動工況下的X 方向平移姿態仿真曲線與試驗曲線對比圖。
圖12 為反解模塊連續運動工況下的Z 方向平移姿態仿真曲線與試驗曲線對比圖。
從試驗數據來看,通過反解算法解算出來的結果與試驗值相差不超過1%,證實了反解算法和反解模塊的準確性,此處包含平臺運動誤差和航姿儀的測量誤差。
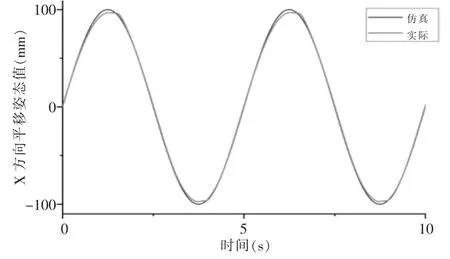
圖11 X 方向平移姿態仿真曲線與試驗曲線對比圖
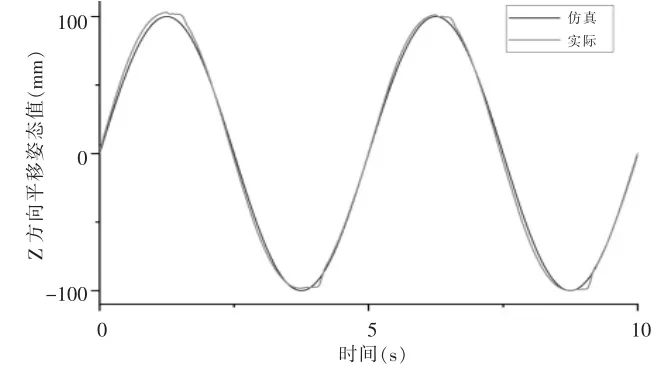
圖12 Z 方向平移姿態仿真曲線與試驗曲線對比圖
5 結論
本文基于AMESim 中的Submodel Editor 功能設計一款較為復雜的控制元件,有以下結論:
基于AMESim 的Submodel Editor 功能制作了一個新的子模型集成到Amesim 元件庫中, 并進行了試驗驗證。在六自由度并聯機構仿真模型時可以方便的調用, 并且能適應所有同類型的并聯機構, 可效提高了同類型產品的設計效率。
控制子模型的制作, 給所有希望在AMESim 中實現一些新設計和操作的仿真工作者一個新思路:對于一些元件庫中沒有的元件,不是選擇搭建準確度較差的等效模型或者操作繁瑣的聯合仿真,而是根據所需元件的數學模型搭建新的子模型,從而實現軟件內更高效,更便捷的仿真。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19