群智能優化算法反演概率積分參數的性能比較與分析
2022-09-02 13:38:24黃金中李靖宇滕超群李世保
金屬礦山 2022年8期
黃金中 王 磊 李靖宇 蔣 創 滕超群 李 忠 李世保
(安徽理工大學空間信息與測繪工程學院,安徽 淮南 232001)
概率積分法(Probability Integral Method,PIM)預計模型是我國礦山開采沉陷研究中應用較廣泛且較為成熟的方法[1-2],如何精確反演PIM參數是提高開采沉陷預計精度的關鍵[3]。近年來,隨著計算機應用科學的發展,各種群智能算法不斷涌現,并且不少群智能優化算法已經在PIM參數反演中得到應用。群智能優化算法是一種受到大自然生物群行為、現象的靈感啟發而演化的全新的智能算法,作為一種新型的自然元啟發式算法,現階段,不少學者嘗試采用遺傳算法[4]、粒子群優化算法[5-6]、狼群算法[7]、人工蜂群算法[8]、果蠅算法[9]、蟻群算法[10]、混合蛙跳算法[11]等群智能優化算法實現PIM參數的精確反演研究。群智能優化算法反演PIM參數具有計算機編程易實現、求參效果好等優點。由于不同的群智能優化算法具有不同的特點,各算法因各自的理論基礎和模型的差異不僅使得參數反演結果不同,而且也表現出不同的參數反演性能。此外,在以往群智能優化算法反演PIM參數的應用中,僅通過模擬試驗及工程實例驗證反演精度,缺乏對各類算法參數反演性能的進一步分析。
結合現有成果分析,并結合課題組已有研究發現,獅群算法(LSO)、蝙蝠算法(BA)、人工魚群算法(AFSA)在PIM參數反演中相對于已有的遺傳算法、粒子群優化算法等來說,應用較為薄弱。LSO算法計算機編程簡單、模型易懂、求參穩定性較好、算法速度快;BA算法具有參數較少、速度快、模型簡單和魯棒性好等優點,但易早熟收斂,求參精度不高,后期進化容易陷入局部解;AFSA算法全局搜索性能較強,可以準確地找到可行解,參數設置范圍較廣,對參數初始值要求不高,但由于受到視野、步長等因素影響,很大程度上使得人工魚活動范圍受到制約,收斂速度慢,容易陷入局部最優解。為此,本研究從抗隨機誤差性能、抗粗差干擾性能、觀測點缺失的抗干擾性能、參數波動性和全局搜索性能等方面對LSO、BA、AFSA3種算法對于PIM參數的反演性能進行詳細分析,進一步評價各算法用于反演PIM參數的適用性。
1 PIM原理分析
PIM是我國“三下”采煤中應用較為經典的開采沉陷預計方法[12],其原理如圖1所示。
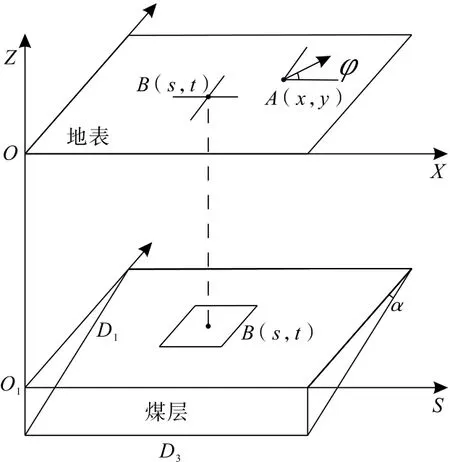
圖1 地表和煤層坐標示意Fig.1 Schematic of surface and coal seam coordinates
根據PIM原理,假設在煤層處開采一個微小的單元,導致地面上任意一點發生的下沉移動變形值可表示為

式中,We(x,y)為整個工作面開采引起地面任意點A(x,y)發生的下沉移動變形值,mm;m為工作面開采厚度,m;q為下沉系數;H為工作面平均采深,m;H1、H2分別為工作面上邊界采深、工作面下邊界采深,m;D3、D1分別為工作面走向、傾向長度,m;α為煤層傾角,(°);θ為開采影響傳播角,(°);tanβ為主要影響角正切;Sa、Sb、Sc、Sd分別為工作面的上、下、左、右拐點偏移距,m;s為煤層處開采一個微小單元B的橫坐標,m;t為微小單元B的縱坐標,m;Wmax為礦區充分采動條件下地表最大下沉值,mm;erf(·)為概率積分法的誤差函數;W0(x)、W0(y)分別為有限開采條件下,位于X軸和Y軸上任意位置的A(x,y)點下沉移動變形值,mm。
沿著φ方向的水平移動變形值可表示為

式中,φ為沿著X軸正向逆時針與已知方向的夾角,(°);r1、r2分別為下山方向和上山方向的主要影響半徑,m;Ue(x,y,φ)為整個工作面開采引起地面任意點A(x,y)沿著φ方向發生的水平移動變形值,mm;U0(x)、U0(y)分別為有限開采條件下,位于X軸和Y軸上任意位置的A(x,y)點的水平移動變形值,mm。
在工作面地質采礦條件參數:采厚m、平均采深H、走向長度D3、傾向長度D1、煤層傾角α已知的情況下,根據PIM參數:下沉系數q、主要影響角正切tanβ、水平移動系數b、開采影響傳播角θ、上拐點偏移距Sa、下拐點偏移距Sb、左拐點偏移距Sc、右拐點偏移距Sd,可獲取地表任意一點因該工作面開采而發生的變形值。
1.1 群智能優化算法
1.1.1 獅群算法
獅群算法是一種新型群智能優化算法[13-15],以模仿獅群群體捕獲獵物習性為基礎,將其設計演化迭代計算。獅群算法按照相應比例將獅群分為雄獅、雌獅、幼獅3個部分。雄獅代表最優適應度值個體。在該算法中,將最佳的適應度值賦值給雄獅,一定比例值定義為幼獅,其余的適應度值賦值給雌獅。該算法由獅群中不同類型的獅子位置不斷更新迭代,每個獵物(食物源)的位置作為待優化的可行解,構建適應度函數,從而求解全局最優值。
1.1.2 蝙蝠算法
蝙蝠算法由YANG[16]于2010年提出,是一種基于迭代尋優和蝙蝠自然習性靈感的啟發性群體智能優化算法[17]。該算法模仿蝙蝠捕獵時,利用超聲波回聲定位原理搜尋獵物,能夠有效地避開阻擋物,甚至在黑暗的環境里快速搜尋、定位獵物方向和位置,并快速地捕殺獵物。通過更新蝙蝠自身位置、速度等方面,在建立解的搜索空間內尋求問題解的最優值。
1.1.3 人工魚群算法
近年來人工魚群算法備受學者青睞,是一種模擬魚群行為方式的群體智能優化算法[18-21]。該算法模擬魚群有4種行為:隨機行為、覓食行為、聚群行為、追尾行為,魚群中每個個體位置為待求解,通過比較4種行為方式的視野食物濃度大小,通過將目標函數值置于公報板內,實現問題的最優化求解。
上述3種群智能優化算法的參數反演流程如圖2所示。

圖2 群智能優化算法流程Fig.2 Flow of swarm intelligence optimization algorithm
1.2 參數反演構建
在煤層開采前,通常沿工作面的走向和傾向共布設2條水準觀測線。在工作面開采過程中,定期對觀測站進行水準測量,來獲取實測下沉值和水平移動值分別記為Wxy、Uxy。結合工作面地質采煤條件及PIM參數,根據式(1)、(4)求出預計下沉值與水平移動值分別記為Wxy1和Uxy1。利用群智能優化算法反演PIM參數,以P={q、tanβ、b、θ、Sa、Sb、Sc、Sd}為群智能優化算法的目標解空間,在解空間中生成種群,在每一次迭代中群體在目標解空間中搜索,不斷循環直到滿足算法要求,最后輸出最優解,判定最優解的標準以適應度函數值最小作為準則。以開采點實測值與預計下沉值之差的平方和加上實測值與預計水平移動值之差平方和為基準的適應度函數可表示為

式中,Wxy、Uxy分別為實測下沉值和水平移動值,mm;Wxy1、Uxy1分別為預計下沉值和水平移動值,mm;R為適應度函數。
2 精度驗證
2.1 模擬試驗
2.1.1 試驗數據
設計模擬工作面地質采礦條件為:煤層傾角為5°,平均開采深度為400m,采厚為2m,模擬矩形工作面走向長度D3=800 m,傾向長度D1=300 m。依據經驗選取符合本礦區PIM參數值:下沉系數q=0.7,主要影響角正切tanβ=2,水平移動系數b=0.3,開采影響傳播角θ=87°,拐點偏移距為Sa=Sb=Sc=Sd=40 m。在工作面開采區域上,移動盆地內沿著走向和傾向各設計1條監測線(N與M監測線),沿走向、傾向主斷面分別布設55/32個監測點,相鄰監測點距離為30m,走向觀測線長為1 620 m,傾向觀測線長為930 m,工作面與監測點位置的對應關系如圖3所示。
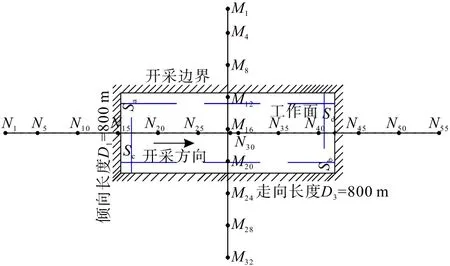
圖3 模擬工作面測線和點位布設Fig.3 Layout of the monitoring lines and points of the simulated wokring face
2.1.2 試驗結果
以預計值作為參數反演的數據,分別計算N、M線上監測點的地表沉陷值(參考工作面開采信息),采用上述群智能優化算法反演PIM參數,分別進行了10次參數反演,其結果見表1。

表1 參數精度對比Table 1 Comparion of the parameter accuracy
分析表1可知:
(1)3種群智能優化算法反演PIM參數,參數q、tanβ、b、θ的擬合中誤差分別低于 0.03、0.12、0.03、1.4,其中,q、b參數精度比較高,拐點偏移距Sa、Sb、Sc、Sd的擬合中誤差均在3.0~8.0 m范圍內。
(2)各算法反演PIM參數q、tanβ、b、θ的相對誤差均不高于1.6%、3.2%、4.1%、0.3%,LSO算法的拐點偏移距相對誤差最大不高于2.0%,BA、AFSA算法的拐點偏移距相對誤差均不高于6.0%;LSO、BA與AFSA 3種算法反演參數取均值后,LSO算法的擬合水平移動值與下沉值中誤差為3.85 mm,擬合中誤差最小,參數反演精度較高,AFSA算法擬合中誤差為10.34 mm,參數反演精度最低。
2.2 工程應用
2.2.1 研究區概況
結合安徽省淮南市顧橋礦南二區1414(1)工作面的地表實測數據[11],對文中LSO、BA與AFSA 3種群智能優化算法性能進行對比研究分析。該工作面地質采礦情況為:煤層傾角為5°,平均采厚為3 m,平均采深為735 m;工作面走向長度約為2 120 m,傾向寬度約為251m。走向和傾向觀測線共布置145個監測點和6個控制點,相鄰監測點距離分別為60 m/30 m,走向觀測線長為3 480m,傾向觀測線長為1 500m,礦區1414(1)工作面觀測站布置如圖4所示。

圖4 礦區1414(1)工作面觀測站布設Fig.4 Layout of the observation station of 1414(1)working face in mining area
2.2.2 試驗結果分析
基于實測變形值,采用上述群智能優化算法進行PIM參數反演。為避免試驗的偶然性,在相同條件下,分別進行10次參數反演,以反演參數的均值作為最終結果,求取參數中誤差,其結果見表2。并據此繪制了下沉與水平移動值擬合曲線,如圖5所示。

表2 工程應用求參結果對比Table 2 Comparison of the parameter inversion results for engineering application

圖5 工程應用下沉與水平移動值擬合曲線及誤差結果對比Fig.5 Comparison of fitting curves and error results of subsidence and horizontal movement values in engineering application
分析表2以及圖5可知:
(1)利用群智能優化算法反演PIM參數取其平均值,參數q、tanβ、b均值最大不超過1.9,從參數反演均值可以看出,LSO與BA算法反演參數數值相近,LSO算法相對于AFSA算法反演參數均值略有差別;反演參數均值互差在上拐點偏移距和左偏移距反演結果波動性很大,AFSA算法的上拐點偏移距與另外兩種算法互差較大,互差結果最大為5.541 5,其差值約占平均值的83.6%。
(2)3種算法反演PIM參數求取監測點預計水平移動值與實測值的絕對誤差在200 mm以內,預計下沉值與實測下沉值的絕對值誤差最大不超過275 mm;3種群智能優化算法參數反演精度均比較理想,但相比之下,LSO和BA算法的下沉值與擬合下沉值曲線、水平移動值與擬合水平移動值曲線基本與實測值曲線相吻合(圖5),較為穩定;LSO、BA與AFSA算法的下沉值與水平移動值的擬合中誤差分別為112.88、115.71、114.20 mm,3種群智能優化算法求參精度相近,均滿足工程應用精度要求。
3 多角度分析
經模擬試驗及工程實例驗證,上述群智能優化算法均滿足工程應用精度需求。為了更充分探究其在PIM求參中的性能,分別從驗證抗隨機誤差性能、抗粗差干擾性能、觀測點缺失的抗干擾性能、參數波動性和全局搜索性能等方面對3種群智能優化算法性能進行分析。
3.1 抗隨機誤差性能分析
以2.1.1節模擬工作面為例,人為地將N、M線上觀測站的下沉、水平移動值分別增加中誤差為10 mm、15mm的隨機誤差。隨后采用上述3種群智能優化算法反演PIM預計參數,分別進行10次參數反演,其結果見表3。

表3 抗隨機誤差分析結果Table 3 Results for anti-random error analysis
分析表3可知:在每個監測點的下沉值、水平移動值中加入隨機誤差的前提下,LSO、BA與AFSA算法反演參數相對誤差均有所增加,各個算法反演PIM參數q、tanβ、b、θ的相對誤差分別不高于 2.7%、3.0%、12.0%、0.7%,拐點偏移距的相對誤差分別不超過4.1%、7.8%、5.8%、2.1%;從反演擬合中誤差看,AFSA算法的擬合水平移動值與下沉值中誤差為23.16mm,擬合中誤差最大,BA、LSO算法的擬合水平移動值與下沉值中誤差分別為13.38 mm、11.18 mm,顯然LSO算法擬合中誤差相比BA和AFSA兩種算法略小,因此,LSO算法能更好地抵抗隨機誤差影響。
3.2 抗粗差性能分析
將N、M線上觀測站的最大下沉值點以及拐點處分別增加粗差200 mm后,采用3種群智能優化算法分別對設置粗差的數據進行了PIM參數反演,結果見表4。
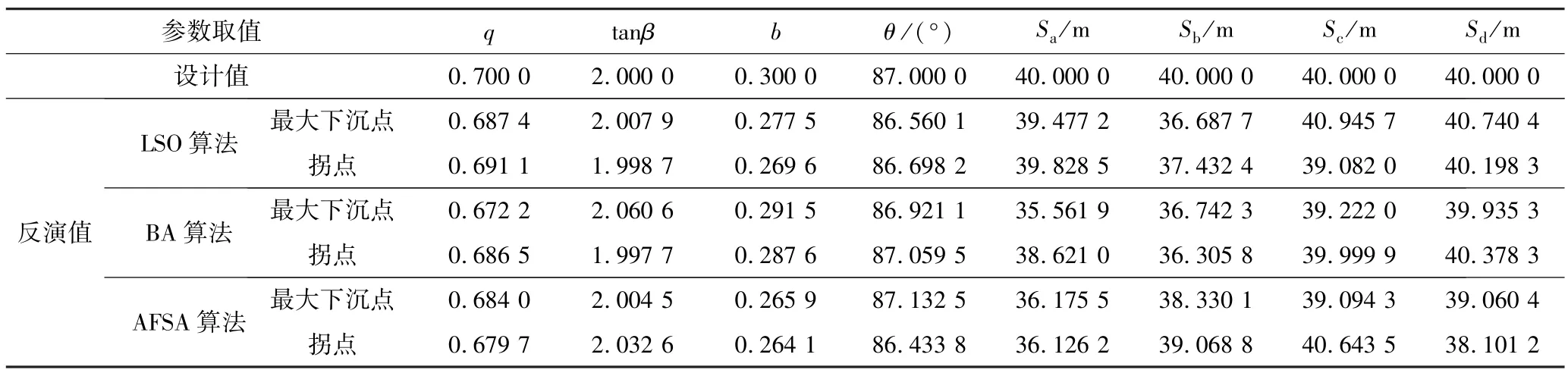
表4 抗粗差分析結果Table 4 Results for anti-outlier analysis
分析表4可知:在最大下沉點、拐點處加入粗差后,LSO、BA與AFSA算法反演的PIM參數精度有所 降低,各算法參數相對誤差增大,但從整體來看,除了水平移動系數、上拐點偏移距值偏大,水平移動系數的相對誤差最大值為12.0%以外,其他參數相對誤差較小。在該拐點處、最大下沉點處分別增加200 mm的粗差后,其BA算法的擬合水平移動值與下沉值中誤差分別為10.76 mm、14.36 mm,擬合中誤差最小,BA算法抵抗粗差的干擾能力最優;LSO算法的擬合水平移動值與下沉值中誤差分別為18.09 mm、14.95 mm,LSO算法抵抗粗差的干擾能力優于AFSA算法;AFSA算法的擬合水平移動值與下沉值中誤差分別為23.60mm、21.77mm,擬合中誤差最大,AFSA算法抵抗粗差的干擾能力最弱。
3.3 觀測點抗缺失分析
在野外對地表觀測站采集數據時,因很多不利因素例如自然環境、維護力度等方面造成少量的觀測站地標被損害或者移動,從而使得觀測數據不齊全,觀測站數據的缺失在很大程度上影響了參數反演結果[22]。
將下沉曲線劃成3個區域:h為觀測線邊緣至拐點處,g為拐點處至最大下沉點處,e為最大下沉點以后區域。 對h、g、e3個區域分別隨機地缺失20%監測點,采用3種群智能優化算法對缺失后的數據反演PIM預計參數,結果如表5所示。
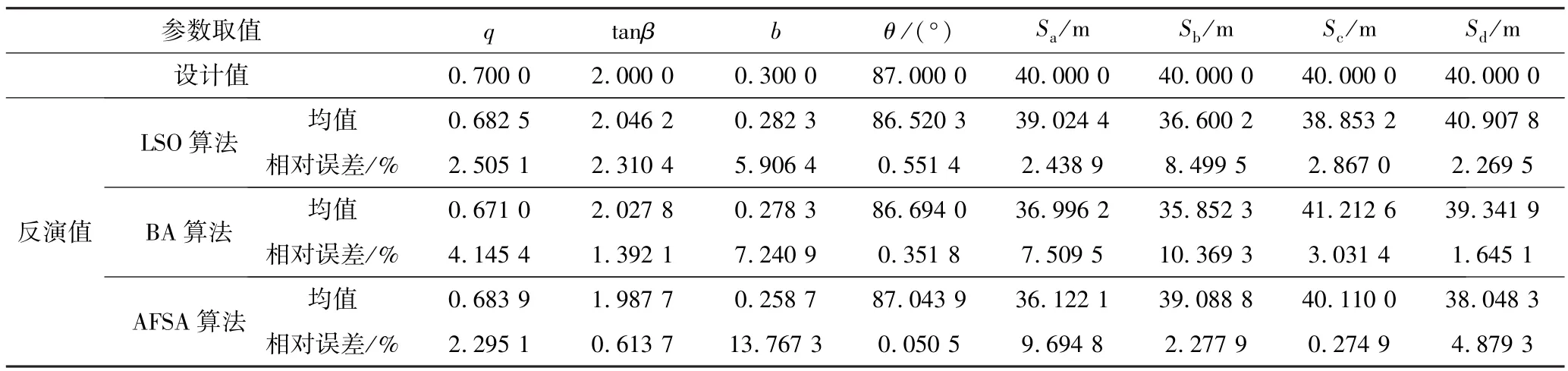
表5 抗點缺失分析結果Table 5 Results for anti-point missing analysis
分析表5可知:在h、g和e3個區域分別隨機地缺失20%監測點的前提下,由于點位的缺失,3種算法的影響傳播角影響最小,相對誤差均不超過0.6%,其他參數因觀測站數據的缺失,對反演參數影響呈遞增趨勢,AFSA算法反演參數水平移動系數的相對誤差相對其他參數偏大,為13.7673;從反演擬合中誤差看,LSO、BA與AFSA算法對缺失后的數據反演的擬合水平移動值與下沉值中誤差分別為14.24、19.29、25.70 mm,LSO算法的擬合中誤差最小,因此,LSO算法抗缺失能力優于BA和AFSA算法。
3.4 參數波動性分析
為驗證群智能優化算法反演參數的穩定性,以3.1節增加了隨機誤差的數據為基礎,來探討在隨機誤差影響的前提下各參數的波動性狀況,利用群智能優化算法進行30次反演試驗,求取PIM 8個參數,隨著迭代次數不斷增加,觀察8個參數的收斂情況,結果如圖6所示。

圖6 參數波動性分析Fig.6 Parameter volatility analysis
分析圖6可知:3種算法在隨機誤差的基礎上,LSO、BA與AFSA算法反演PIM參數結果拐點偏移距的波動性較大,其余參數波動性較平穩;另外,從圖中可看出LSO算法反演PIM預計參數結果總體波動性優于BA與AFSA算法。
3.5 全局搜索性能分析
為降低偶然誤差對試驗結果的影響,在相同環境條件下,將反演參數解空間范圍擴大為原來的2倍,然后對群智能優化算法進行反演試驗,群智能優化算法反演PIM參數時的全局搜索能力對比見表6。

表6 全局搜索能力分析結果Table 6 Analysis results of global search capability
分析表6可知:在擴大一定反演參數解空間范圍的前提下,群智能優化算法反演PIM參數的相對誤 差都有所增大,參數q、tanβ、b、θ相對誤差最大值分別小于 1.7%、4.9%、6.1%、1.4%,Sa、Sb、Sc、Sd相對誤差均在8.7%以內;從反演擬合中誤差看,AFSA算法的擬合水平移動值與下沉值中誤差為8.54 mm,擬合中誤差最小,LSO算法的擬合水平移動值與下沉值中誤差為24.32 mm,擬合中誤差最大。綜上可知:就全局搜索能力而言,AFSA算法全局搜索能力最強。
4 結 論
(1)傳統的概率積分法優化算法精度不高,雖然近年來也有不少群智能優化算法被引入其中,但考慮到不同算法具有不同的特征,在具體研究中,無法實現各類算法的高效優選。LSO、BA、AFSA 3種群智能優化算法較為新穎,盡管在PIM參數反演中相對于已有的幾類算法而言涉及較少,但未來在PIM參數反演中具有較大的應用潛力。
(2)LSO算法在抗隨機誤差干擾影響、觀測點缺失的抗干擾能力方面以及參數結果總體波動性方面較BA、AFSA算法有一定的優勢;BA算法在抗粗差干擾能力方面優于LSO、AFSA算法;在全局搜索性能方面,隨著反演參數解空間范圍擴大為原來的2倍,用AFSA算法反演概率積分預計參數的精度優于LSO、BA算法。研究結果為有效選擇合適的群智能優化算法進行概率積分參數反演提供了參考。
(3)各種智能優化算法在概率積分法參數反演過程中,在求參精度、穩定性、求參效率方面等表現出的性能有所不同。在工程應用中為追求更好的求參性能,將上述3種算法進行組合或分別與其他算法進行組合應用,尋找一種普適性或時效性組合智能優化算法,需要進一步研究。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
人大建設(2019年12期)2019-05-21 02:55:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32