基于平行線坐標變換的檢測前跟蹤算法
2022-09-09 00:56:06薄鈞天王國宏于洪波彭志剛
航空學報 2022年8期
關鍵詞:檢測
薄鈞天,王國宏,于洪波,彭志剛
1.海軍航空大學 信息融合研究所,煙臺 26400 2.海軍航空大學 青島校區,青島 266041
隨著高科技軍事技術的深入研究,通過使用隱身材料,設計特殊飛行器外形等技術已成為降低空中目標雷達散射截面積(Radar-Cross-Section,RCS)的主要方法,對現有雷達探測體系產生嚴重挑戰。例如美國B-2轟炸機的RCS值低于0.4 m,世界第一型隱身戰斗機F-117A的前向RCS值只有0.001 m。目前更有報道,更加先進的離子隱身技術和量子隱身技術正在研制。可以預見,未來隱身戰斗機將在戰爭中發揮出及其重要的作用。
隱身技術的成熟使得此類飛行器相對雷達成為微弱目標,目前,針對微弱目標的探測多采用相參積累或非相參積累的方式,利用目標運動的時間連續性和幀間關聯性,通過積累提高目標在較長時間內的整體回波能量后再進行峰值檢測。檢測前跟蹤(Track-Before-Detect,TBD)方法是檢測微弱目標較為有效的方式,通過先存儲雷達量測信息,達到一定幀數后進行集中處理。目前主要有基于粒子濾波的PF-TBD技術,基于速度濾波的VF-TBD技術和基于Hough變換的HT-TBD技術等。這些方法各有優勢,均能夠對目標進行有效的檢測。但是,基于粒子濾波的PF-TBD技術需要提升粒子數目以保證檢測效果,實際應用中存在一定的限制;基于速度濾波的VH-TBD技術需要對目標速度進行準確的測量,實踐中要求較高;基于霍夫變換(Hough Transform,HT)的HT-TBD技術在對參數單元進行網格化處理后,積累結果會出現峰值簇擁現象,不僅造成了積累損失,還需要后續更多的時間進行航跡修正,影響算法的檢測概率和計算量。
本文提出一種基于平行線坐標變換檢測前跟蹤(Parallel-line-coordinate Transformation based Track-Before-Detect,PT-TBD)方法,通過在笛卡爾坐標系內設置平行軸線進行同坐標系的點到線轉換,分割二維平面進行積累,提取峰值后進行航跡回溯得到最終的結果。由于Hough變換屬于極坐標轉換,而平行線坐標變換為線性變換,因此PT算法本身比HT算法有更低的運算量。仿真結果顯示,PT-TBD算法產生的積累損失更小,具備更高的檢測概率;與HT-TBD算法相比,PT-TBD算法提高了運行效率,在未來具備一定的應用和研究前景。
1 目標模型
檢測前跟蹤技術考慮的是在較短時間內,將目標航跡視作直線運動,通過對目標回波進行非相參積累進行檢測。因此本文所設模型,均為短時間內沿直線的目標航跡。

+1=,+1+
(1)
式中:=[,0,,0]′表示目標運動中出現的過程噪聲;,+1表示狀態轉移矩陣,且
(2)
雷達對目標的量測只能過程得到目標的徑向距離和方位角數據,量測方程為
+1=()+
(3)
式中:=[,]′表示量測誤差矩陣;=[,]′表示目標在時刻的量測向量,(·)表示量測過程,、分別表示目標的徑向距離和方位角,即
(4)
平面中,量測點的回波能量為
(5)
式中:為雷達發射功率;為天線增益;為目標的雷達散射截面積;為發射電磁波波長。考慮到目標存在起伏,則雷達接收到量測點的回波能量為

(6)
式中:為均值為0服從高斯分布的參數,用于描述能量起伏性。
2 算法原理
PT-TBD算法主要分為4個步驟,首先將目標量測點以規格化后的徑向距離-時間坐標表示;其次按照平行線坐標變換規則,完成同坐標系下的點到線的轉化;接著網格化線段分布范圍,進行雙重積累;最后提取峰值,并對回溯的航跡進行約束從而得到最終結果。算法流程如圖1所示。
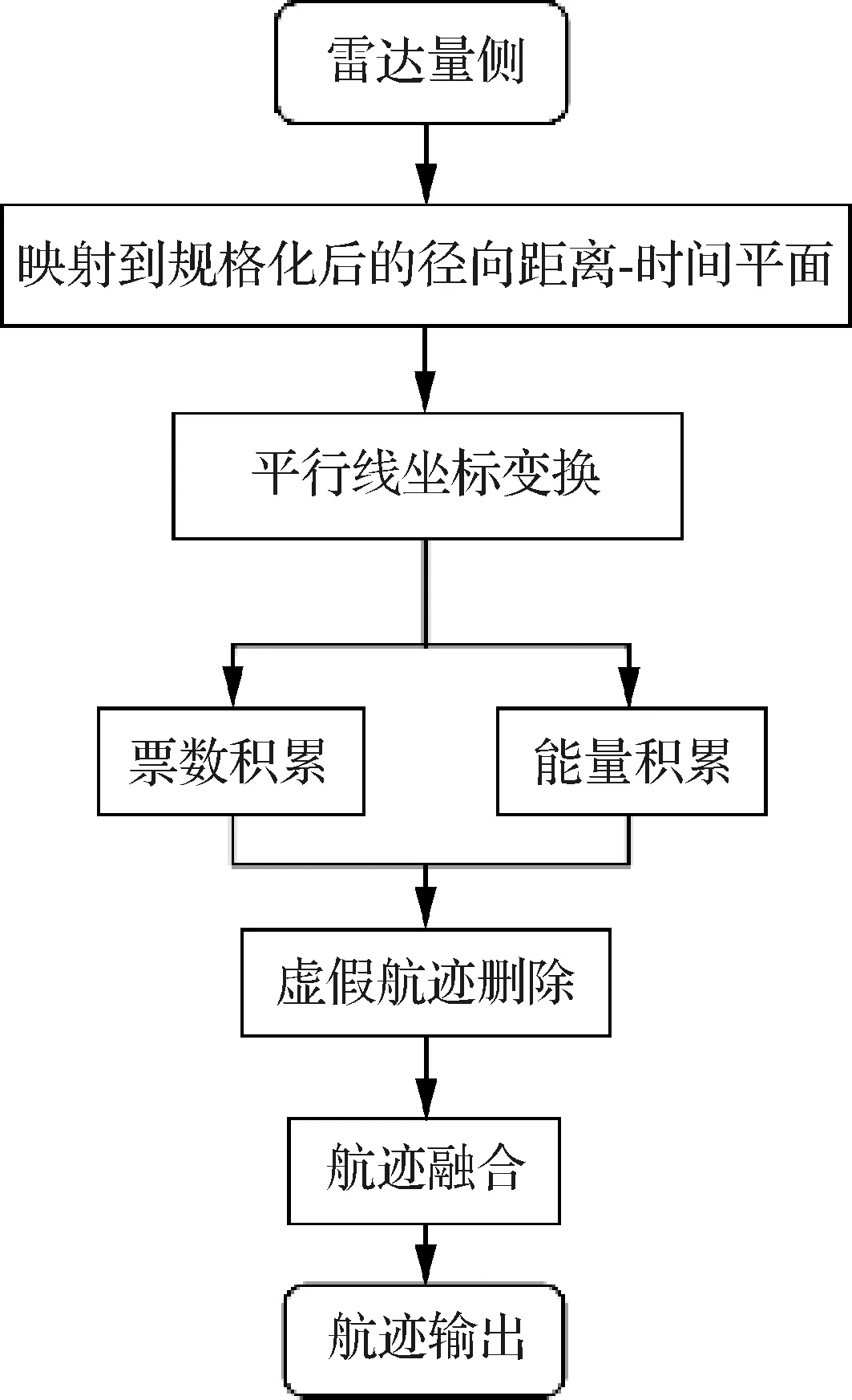
圖1 PT-TBD算法流程圖Fig.1 Flowchart of PT-TBD algorithm
2.1 平行線坐標變換
傳統的HT-TBD算法,是將平面中的點坐標按照Hough變換將量測點變為參數平面中的曲線。本文提出的平行線坐標變換檢測前跟蹤方法,與其有著相似之處。對于空間中某點(,),在相同的-二維笛卡爾平面上繪制2條垂直于橫坐標軸且到軸距離相等的對稱平行直線,設為和,直線上的點橫坐標均為-, 直線上的點橫坐標均為,2線之間距離為2。在直線上找到縱坐標為-的點(-, -),在直線上找到縱坐標為的點(,),在軸上找到縱坐標為的點(0,)。分別連接(-,-)和(0,)、連接(,)和(0,)形成2條新的線段,2條線段所在直線的方程分別為
(7)
對-二維笛卡爾平面上的所有點進行變換后,完成點到線的轉換。會發現,原先處于一條直線=+上的2點必會在新坐標系內交于一點(,),當>0時,其坐標為
(8)
當<0時,其坐標為
(9)
當=0時,其坐標為(0,)。屬于>0和<0直線的量測點,其平行線坐標變換規則如圖2所示。
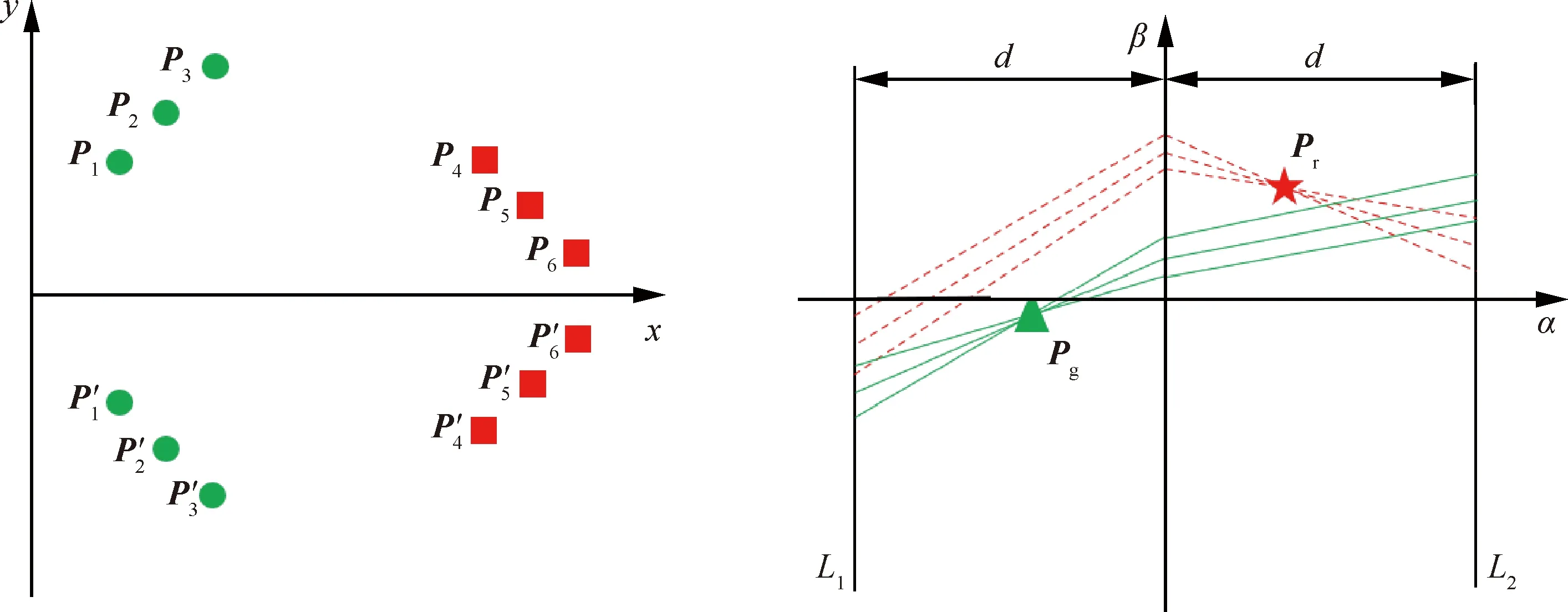
圖2 平行線坐標變換示意圖Fig.2 Schematic diagram of parallel-line-coordinate transformation
圖2中,點~為-二維坐標系上的原始點,點′~′為-二維坐標系上原始點以軸為中心的對稱點,點~屬于一條直線,在平行線坐標系下變成6條線段后交于綠色五角星點;點~屬于另一條直線,在平行線坐標系下變成6條線段后交于紅色五角星點。
2.2 PT-TBD算法
2.2.1 非相參積累
非相參積累完成后,會有一些目標航跡周圍的虛假航跡積累能量超過積累門限,且量測點的-坐標多伴隨較大的橫向誤差。解決這些問題的一般方法是先將量測點坐標映射到徑向距離-時間坐標,后續根據先驗信息設置選通條件在-坐標系下進行約束。同時,由于量測時間數量級遠小于目標徑向距離,如果不進行處理將出現全部直線高度聚集且斜率趨近無窮,因此需進行坐標規格化,公式為
(10)
(,)→(,·)
(11)
關于參數的選取,其基本原則是保證兩平行線之間距離與點變換過來的線段在兩平行線之間變化的范圍處于一個數量級,由于直線與直線上選取點的縱坐標分別是原坐標系下點縱坐標的負值與正值,軸上選取點的縱坐標是原坐標系下點的橫坐標,因此平行線坐標系所有線段的縱向變化范圍為
=max(max(),max(·))-min(-)
(12)
則令平行線間距=05。
此時,變換后線段的分布范圍為一個正方形,分割正方形為×個網格,對每個網格進行線段所代表量測點的能量和票數的帶值積累。例如,時刻的點(,)所代表直線穿過網格(,),其能量為,建立能量積累矩陣和票數積累矩陣,則當滿足:
(13)
或者
科思創中國區總裁盛秉勇(Bjoern Skogum)表示:“可持續發展是科思創的核心戰略支柱之一,中國正對化工行業進行大規模整治重組,以實現可持續發展。在這一背景下成為行業榜樣意義重大。作為一家跨國企業,科思創將繼續為中國化工行業的可持續發展作貢獻,到2025年將生產每噸產品產生的二氧化碳排放較2005年降低50%,利用我們全球化的專業知識讓中國更美好。”
(14)
對2個積累矩陣進行積累,積累過程中,為充分利用時間信息,更有效地檢測航跡,假設該單元時刻有個的直線穿過,只取能量最大值進行積累
(15)
(16)

(17)
接著設置能量積累門限和票數積累門限,將滿足2個積累門限的單元內包含量測點輸出,得到最終結果。
采用2種積累方式的好處是當空間中存在多個回波能量不同的航跡時,可能會出現回波能量差異較大的現象,一般為保證檢測概率會降低積累門限,但同時會引入大量虛假航跡,此時采用票數積累將會把其中包含的量測點總數很少但存在個別目標量測點的虛假航跡濾除掉。
2.2.2 虛假航跡刪除
由于積累后存在峰值簇擁現象,與真實目標航跡所在單元相鄰的單元積累值仍較高,導致其構成虛假航跡被錯誤地提取出。但之前采用的是量測點的徑向距離-時間坐標,為此處的虛假航跡刪除提供了便利。
設所探測的目標飛行速度可能達到的最大值為,可能達到的最小值為,目標相鄰的2條幀間航跡構成轉向角最大值不超過。設、、分別代表峰值提取后,同一條航跡中時刻為、和的量測點,則真實航跡量測點需滿足:
(18)
2.2.3 航跡融合
完成虛假航跡刪除后,仍存在真實目標被檢測出多個航跡的現象,表現為部分航跡中存在虛假量測點,可通過航跡融合解決。即在跟蹤幀數為時,當2條航跡中有個量測點重合時,對2條航跡中相同時刻不同的量測點,刪除能量小的量測點并合并2條航跡:
(19)

2.3 算法理論分析
為進一步探尋PT-TBD算法對HT-TBD算法的優越性,本文作者做了更多的工作。
PT-TBD算法與HT-TBD算法均屬于基于投影變換的檢測前跟蹤算法,最終目的都是為實現目標航跡的有效積累,盡可能地將所有目標量測點的能量積累到一個單元中,避免出現積累損失。此時,能夠將更多目標量測點所變直線聚集到一個單元內進行積累的算法,積累損失也就越小。
積累損失現象,由2個原因共同造成:
量測誤差的存在。目標航跡不是一條嚴格的直線而是分段折線,完成點到線的變換后各分段折線所代表交點無法落到一個單元格內。
離散化直(曲)線造成的縱向偏差。實際算法在分單元積累時是將量測點所變直線或曲線進行采樣處理,積累峰值一般不會恰好選到交點而是選到交點鄰域內的點,當直線或曲線縱向差值超過單元邊長就會使采樣點落到不同的單元。
假設-二維平面中的存在3個位于同一條直線的量測點:(,)、(,)和(,),且設>>>0,>>>0。其中,量測點(,)產生量測誤差(Δ,Δ),導致接收到的位置坐標為(+Δ,+Δ)。
對于原因1:
當不產生量測誤差時,采用Hough變換所變曲線的交點位置坐標(,)中:

(20)
量測點(,)產生量測誤差后,分段折線交點位置的橫坐標分別為

(21)
使得在平面上原本應當落于同一個單元格內的交點產生的橫向偏差為
=-=

(22)
同理,當不產生量測誤差時,采用平行線坐標變換所變直線的交點位置坐標(,)中:
(23)
式中:
=05(max(max(),max())-min(-))
(24)
量測點(,)產生量測誤差后,分段折線交點位置的橫坐標變為

(25)
使得在平面上原本應當落于同一個單元格內的交點產生的橫向偏差為
=-=
(26)
對于原因2:
此處只考慮產生量測誤差的量測點(,)和前一個量測點(,),當采用Hough變換時,2個量測點所變曲線為
(27)
當取同一值時,二者縱向相差
Δ=(-)cos+(-)sin
(28)
設2條Hough變換后曲線應相交于(,),計算2條曲線縱向的差值隨變量~的距離增大的變化公式,并將縱向距離差值為0的點移到坐標零點,結果為
=
|(-)cos(+)+(-)sin(+)|=

(29)
并且:
(30)
同理,當采用平行線坐標變換時,2個量測點所變直線按照式(7)進行變換,由于目標的軸向速度和軸向速度均大于0,則量測點所變直線在負半平面存在交點,直線公式為
(31)
當取同一值時,二者相差:

(32)
設2條平行線坐標變換后直線應相交于(,),計算2條直線縱向的差值隨變量離的距離增大的變化公式,并將直線以軸為對稱軸翻折至正半平面,再將縱向距離差值為0的點移到坐標零點,結果為


(33)
此時,式(29)和式(33)均是過零點函數,將式(22) 和式(26)分別代入式(29)和式(33),求此時產生的縱向誤差得:

(34)
通過對比在相同量測誤差Δ和Δ下和的值,即可對比二者產生的積累損失大小。
3 仿真驗證
3.1 算法仿真
設-二維笛卡爾平面中包含2個目標航跡,目標1的初始位置為(2 km,4 km),運動速度為(100 m/s,80 m/s);目標2的初始位置為(3 km,3.8 km),運動速度為(150 m/s,-120 m/s)。量測范圍內存在雜波,其數目服從每幀50個的泊松分布,總體信雜比為SCR=6 dB。雷達位于坐標原點,徑向距離量測誤差為=20 m,方位角量測誤差為=0.01°。則雷達量測二維平面圖如圖3所示。
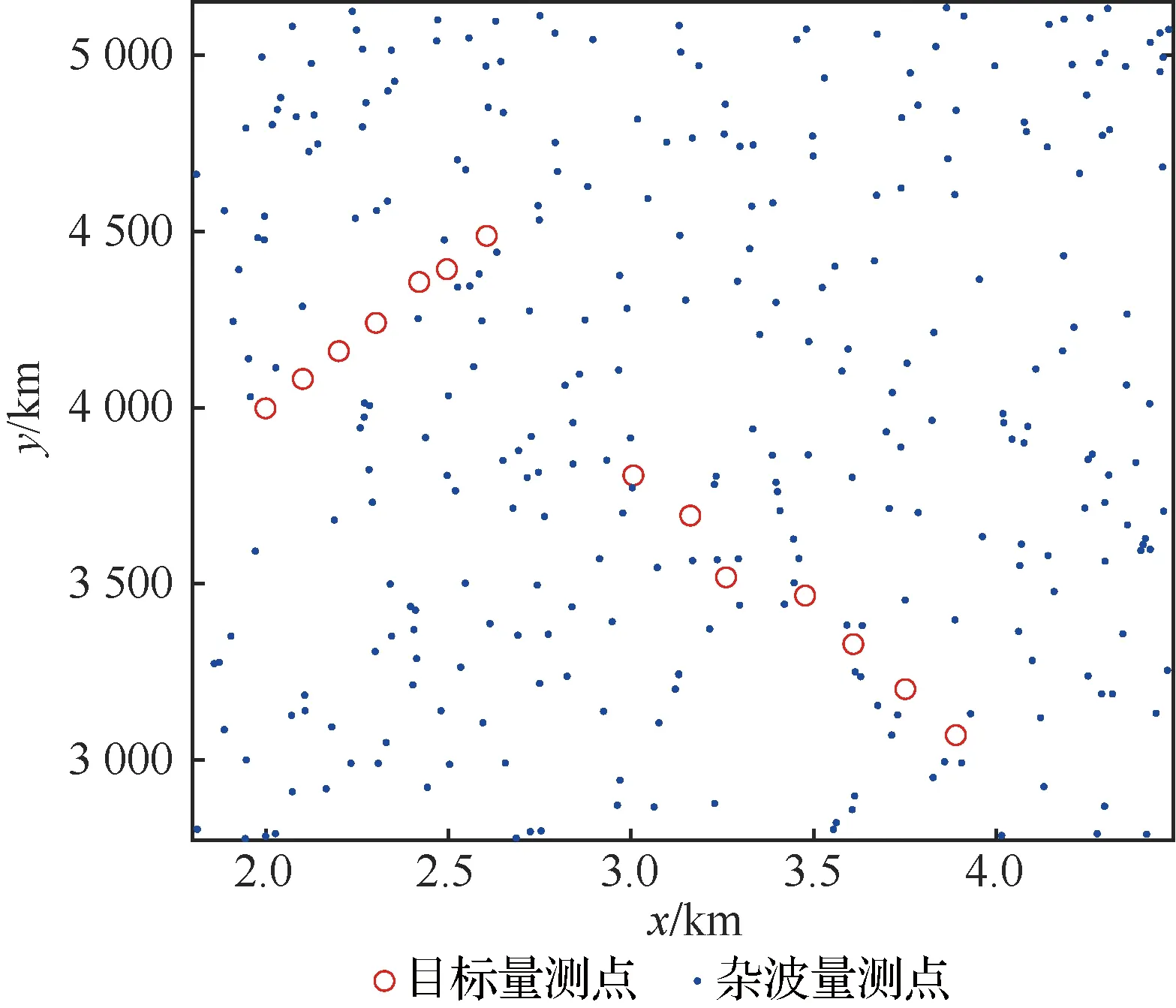
圖3 雷達量測Fig.3 Radar measurements
為減小雷達的量測誤差對結果的影響,并便于后續篩選航跡,將接收到的量測點映射到徑向距離-時間平面,并進行坐標規格化,規格化系數為=95315,如圖4所示。
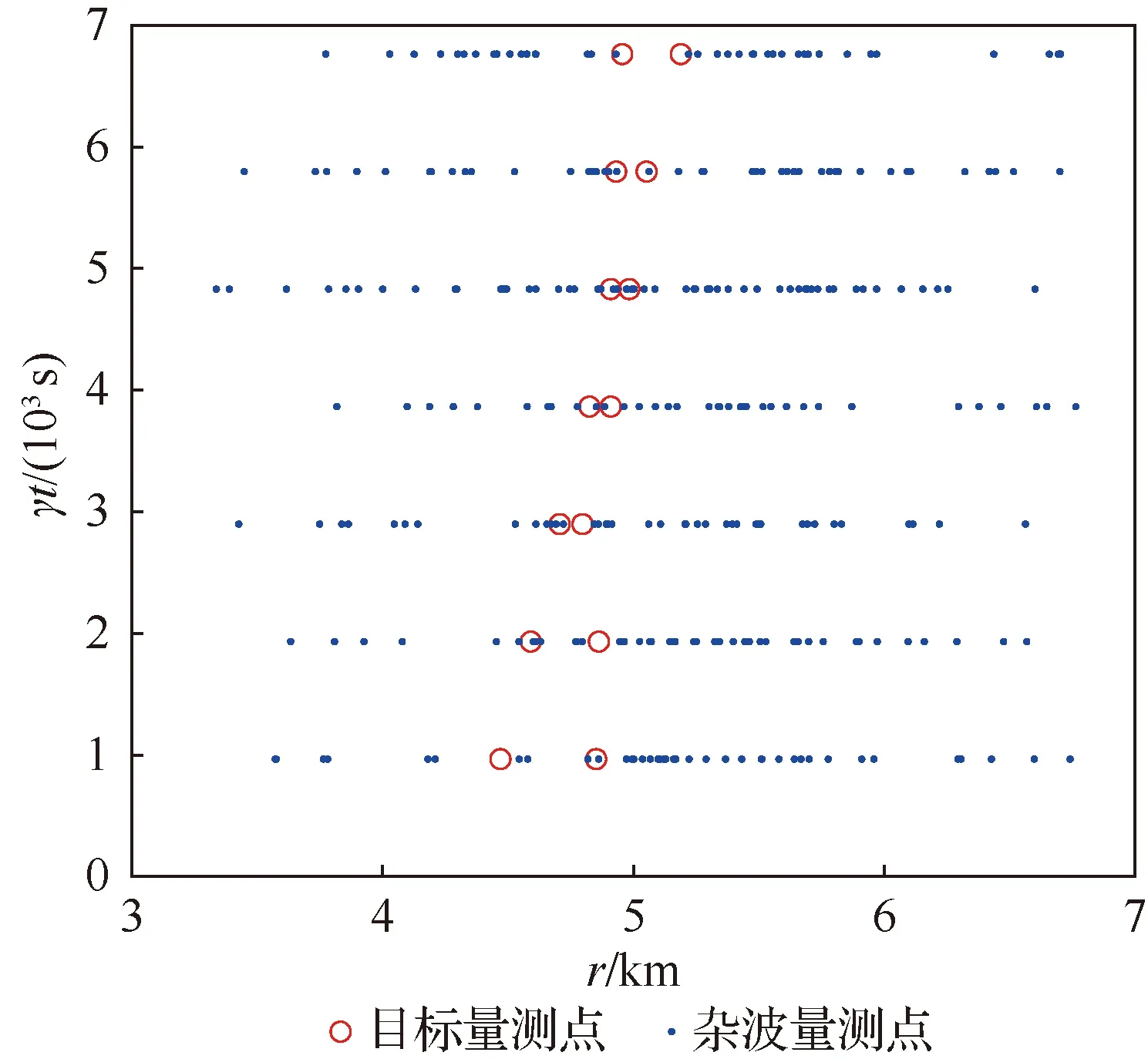
圖4 r-t坐標系下雷達量測Fig.4 Radar measurements in r-t coordinate system
將坐標按照平行線坐標變換完成點到線的轉換下,計算得到=6 673 m,得到結果如圖5所示。
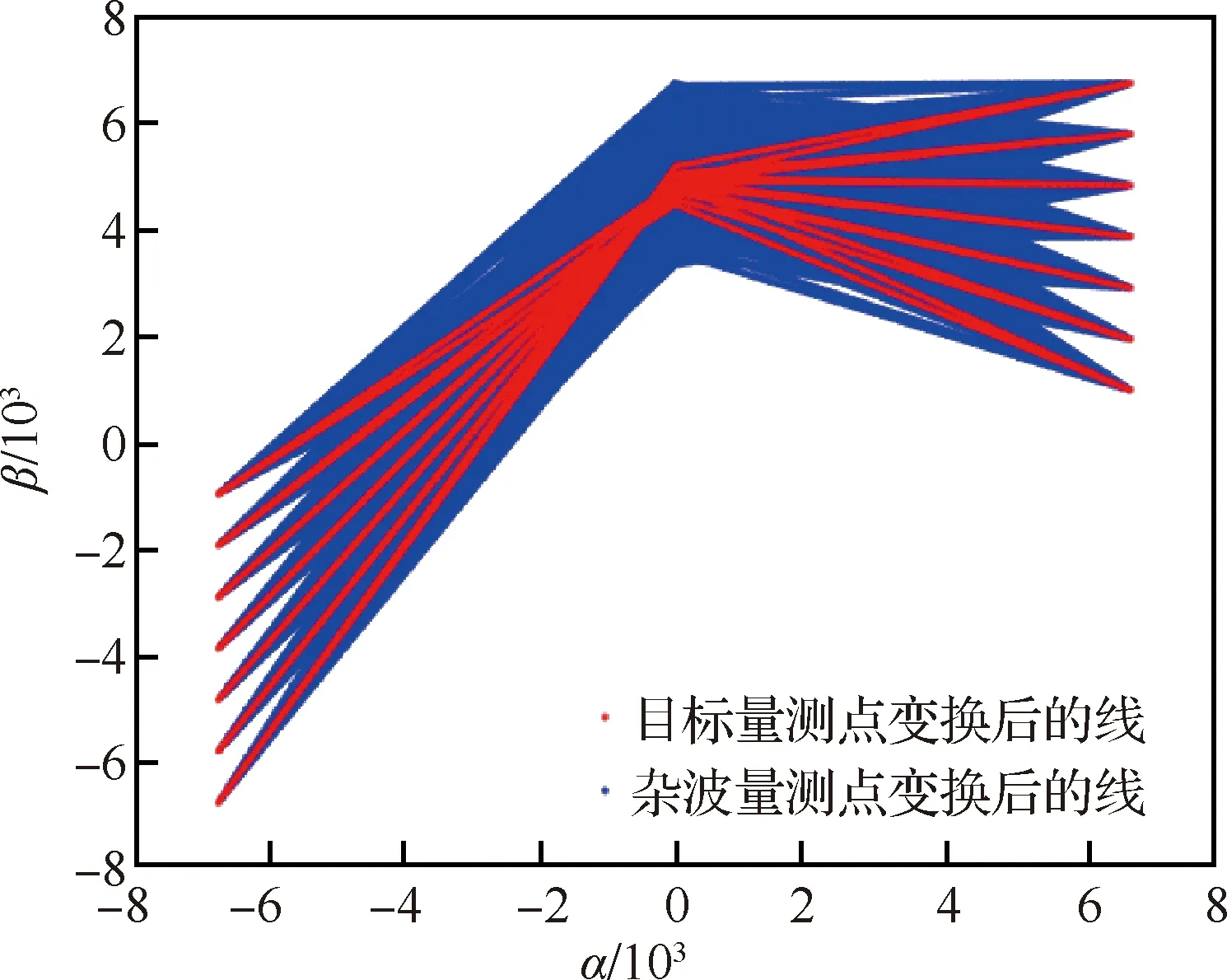
圖5 平行線坐標變換結果Fig.5 Parallel-line-coordinate transformation result
設平行線坐標分割段數為=360,將變換后平面內的線段分布范圍分割為360×360個單元格,建立票數積累矩陣(360,360)和能量積累矩陣(360,360),并按照式(13)~式(17)對每個網格內通過的曲線做票數積累和能量積累,得到結果如圖6和圖7所示。
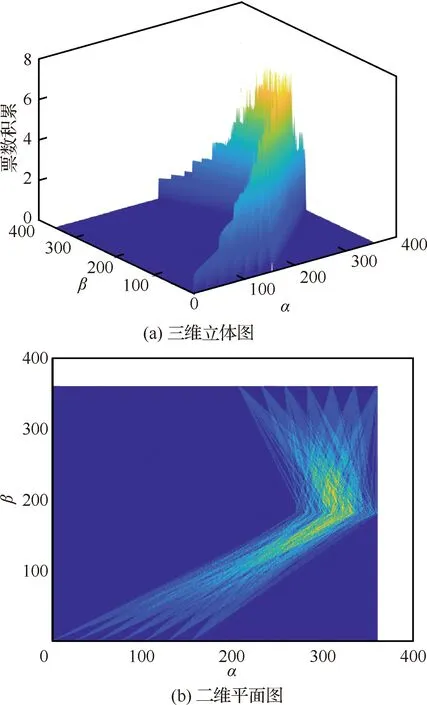
圖6 票數積累Fig.6 Accumulation of votes
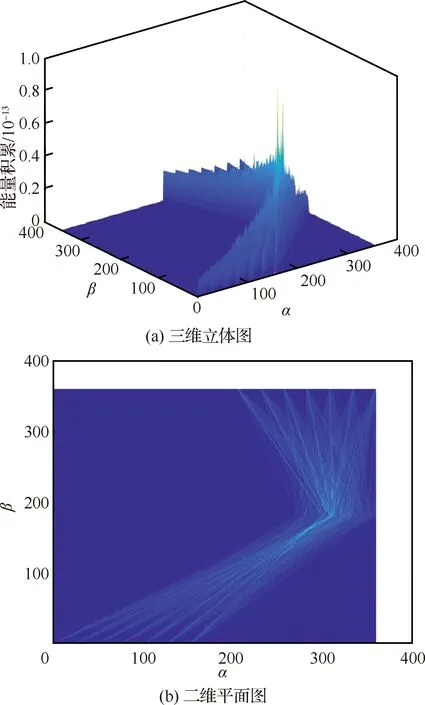
圖7 能量積累圖Fig.7 Accumulation of energy
由于積累幀數為7幀,設置票數積累門限為4,能量積累門限為積累最大值的0.7倍,提取滿足2個積累門限的網格內量測點組成航跡,得到結果如圖8所示。
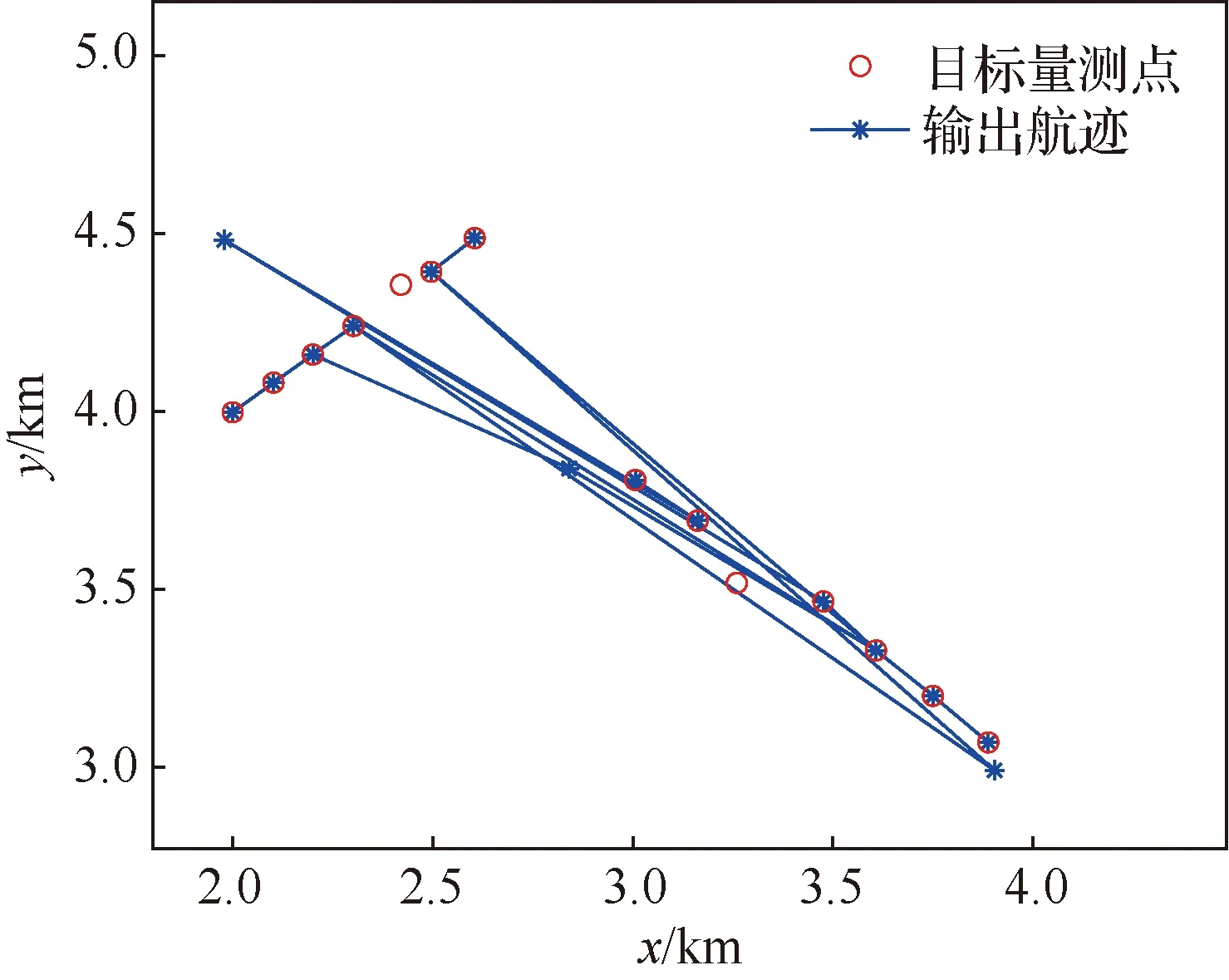
圖8 門限提取后輸出航跡Fig.8 Track output after threshold extraction
根據先驗信息以及雷達量測誤差,設置速度選通條件為=200 m/s,=70 m/s,設角度約束條件為=90°。經過航跡約束和航跡融合后的最終檢測結果如圖9所示。
3.2 有效性測試
為進一步測試本文算法對微弱目標的有效檢測,將通過不同信雜比下目標的檢測概率、虛假航跡率和不同雜波密度下的運行時間進行說明。
3.2.1 檢測概率
設檢測概率為,設某次仿真中,某條輸出航跡有幀量測點與真實目標航跡重合,當采用4/7邏輯時,令是否檢測到目標的判斷系數為,即
(35)
則次蒙特卡洛仿真中,目標的檢測概率為
(36)
在信雜比SCR為0~10 dB條件下進行=300次的蒙特卡洛仿真,分別使用HT-TBD算法和PT-TBD算法計算2個目標各自的檢測概率以及全部目標的檢測概率,結果如圖10所示。
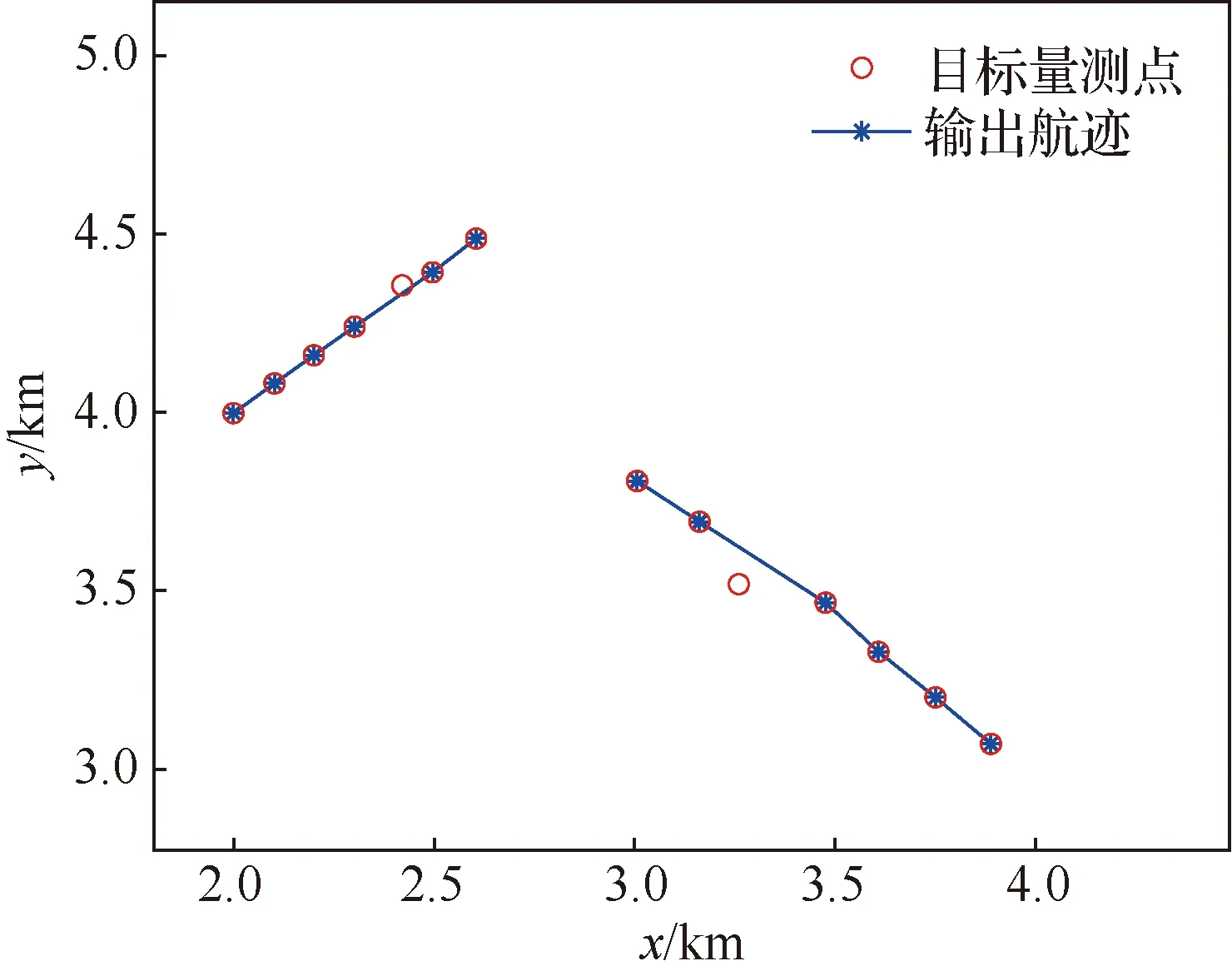
圖9 最終輸出航跡Fig.9 Final output track
由圖10可以看出,2個目標各自的檢測概率以及2個目標全部被檢測到的概率均隨信雜比的升高而升高。當信雜比超過3 dB時,2個目標各自的檢測概率以及全部目標的檢測概率均可達到90%,證明本文算法能夠對目標進行有效檢測。但同時發現,PT-TBD算法的檢測概率優于HT-TBD算法,尤其是在SCR<4 dB時。
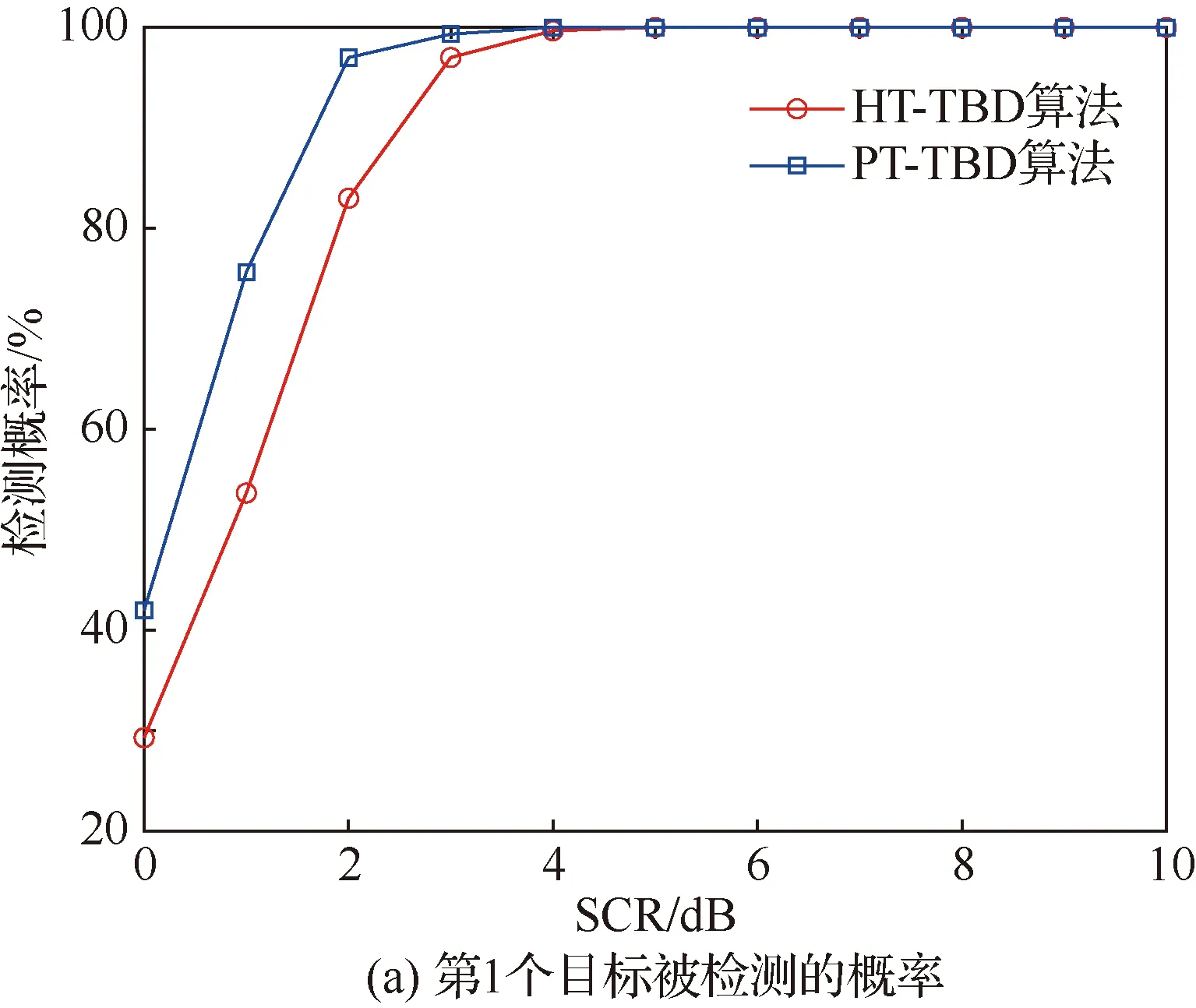
圖10 2個目標各自被檢測的概率和全部 被檢測的概率Fig.10 Probability of detection of each target and both targets
3.2.2 虛假航跡率
設虛假航跡率為,則

(37)
式中:為第次仿真檢測到的虛假航跡數;表示第次仿真中檢測到的總航跡數。同樣在信雜比為0~10 dB條件下進行=100次的蒙特卡洛仿真,計算不同信雜比下算法的虛假航跡率,結果如圖11所示。
由圖11得出,2種算法的虛假航跡率均隨信雜比的升高而下降。對于本文PT-TBD算法,當SCR<2 dB時,虛假航跡率超過90%,說明高回波能量的雜波量測點干擾了雷達對目標的正常檢測;當SCR>9 dB時,虛假航跡率小于20%。總體上看,本文PT-TBD算法虛假航跡率與HT-TBD算法相近。
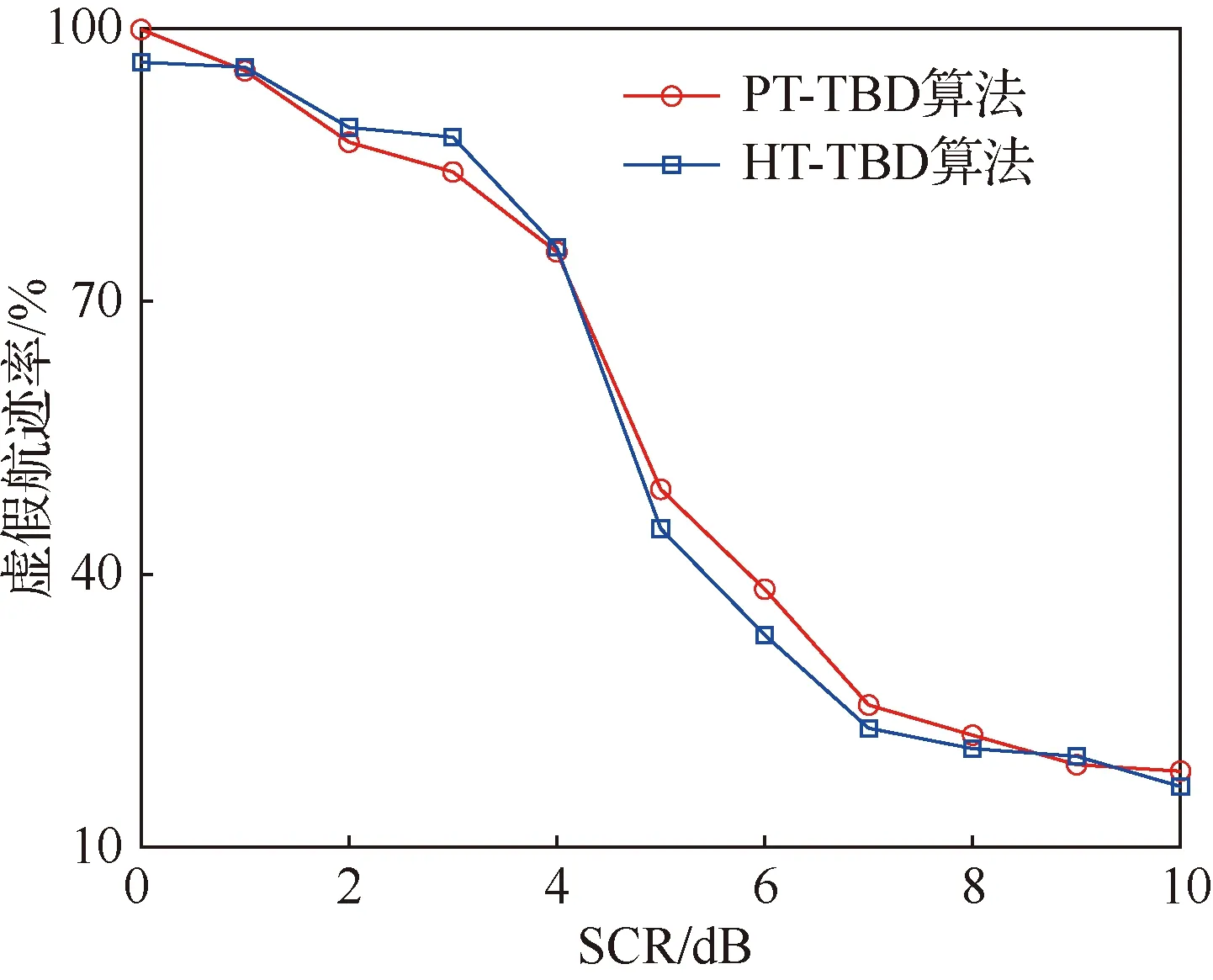
圖11 不同算法下的虛假航跡率Fig.11 False track rate with different algorithms
3.2.3 運行時間
改變每幀雜波密度,觀察算法運行時間,由于雜波密度變化不是等差數列,結果如表1所示。
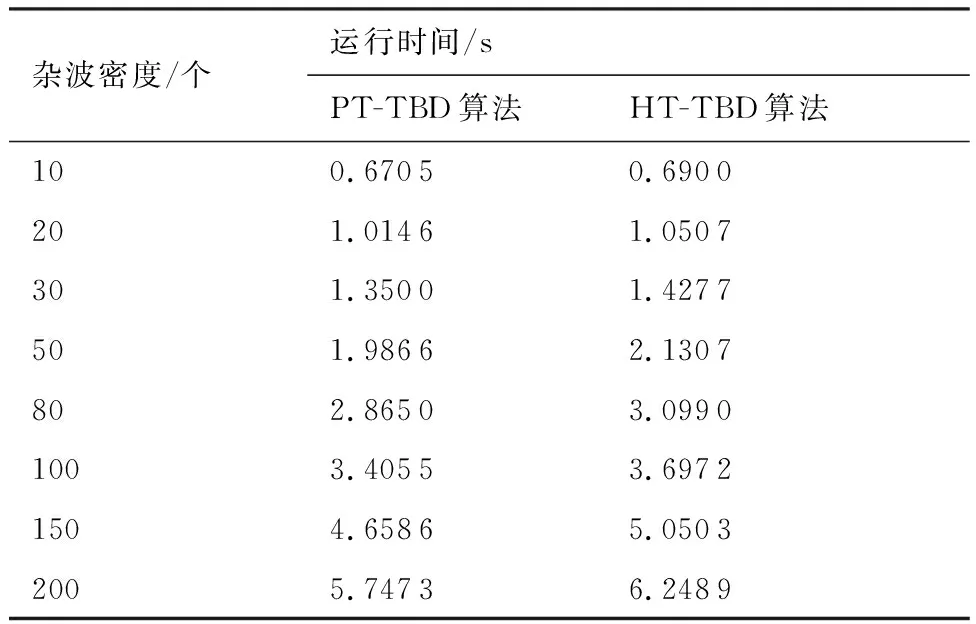
表1 不同雜波密度下的運行時間Table 1 Running time with different clutter density
由表1所示,在不同雜波密度下,本文PT-TBD算法運行時間比修正HT-TBD算法運行時間更短,且時間減少效果隨著雜波密度的升高而提升。也證明文獻[9]中所提的平行線坐標變換屬于線性變換,計算量要小于Hough變換的結論。
3.3 算法仿真分析
按照3.1節參數設置中目標1的前2個量測點設置,如表2所示。
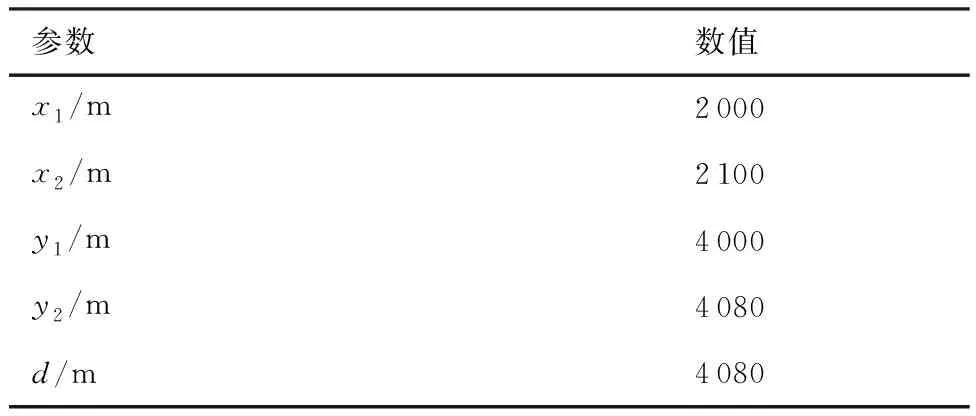
表2 參數設置Table 2 Parameter settings
按照式(34)分別計算相同的2個點經Hough變換和平行線坐標變換后,隨著離交點的橫坐標距離增長使得2線縱向差值的變化曲線如圖12所示。
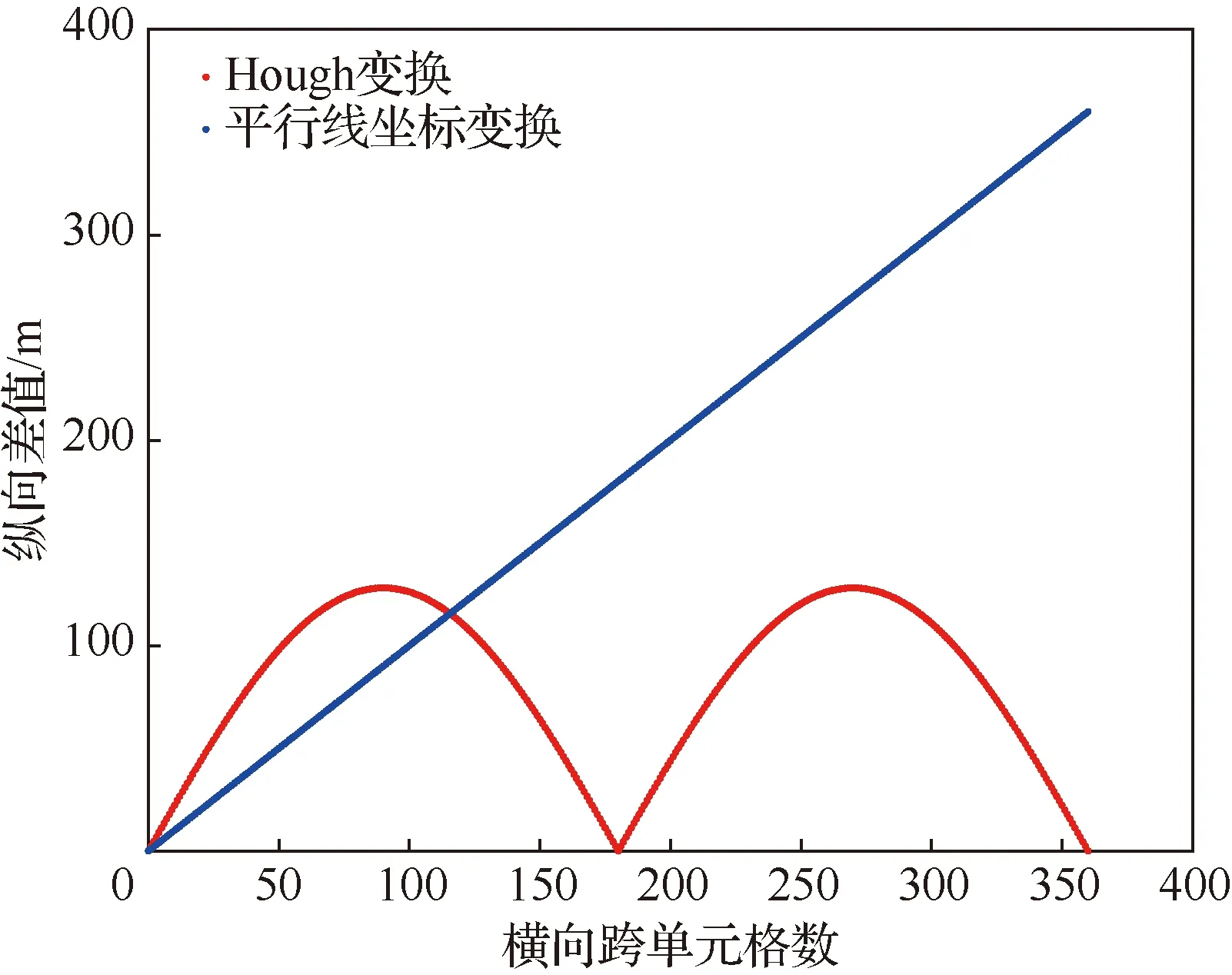
圖12 縱向偏差值變化圖Fig.12 Chart of variation of longitudinal deviation value
由圖12可以看出,采用Hough變換后的2線縱向差值呈現非線性變化;而采用平行線坐標變換后的2線縱向差值呈現線性變化。同時發現,當橫坐標距離交點位置所跨單元格數小于145個時,在相同的橫向跨單元數目下,經Hough變換后的縱向差值大于經平行線坐標變換后的縱向差值。
但考慮到即使是相同的量測誤差下,2種算法產生的橫向差值也存在差別,因此需要繼續計算。設量測點(,)在-二維平面的2個維度產生的量測誤差Δ與Δ均從-50 m以1 m為公差增到50 m,計算2種變換產生的橫向跨單元格數目如圖13所示。
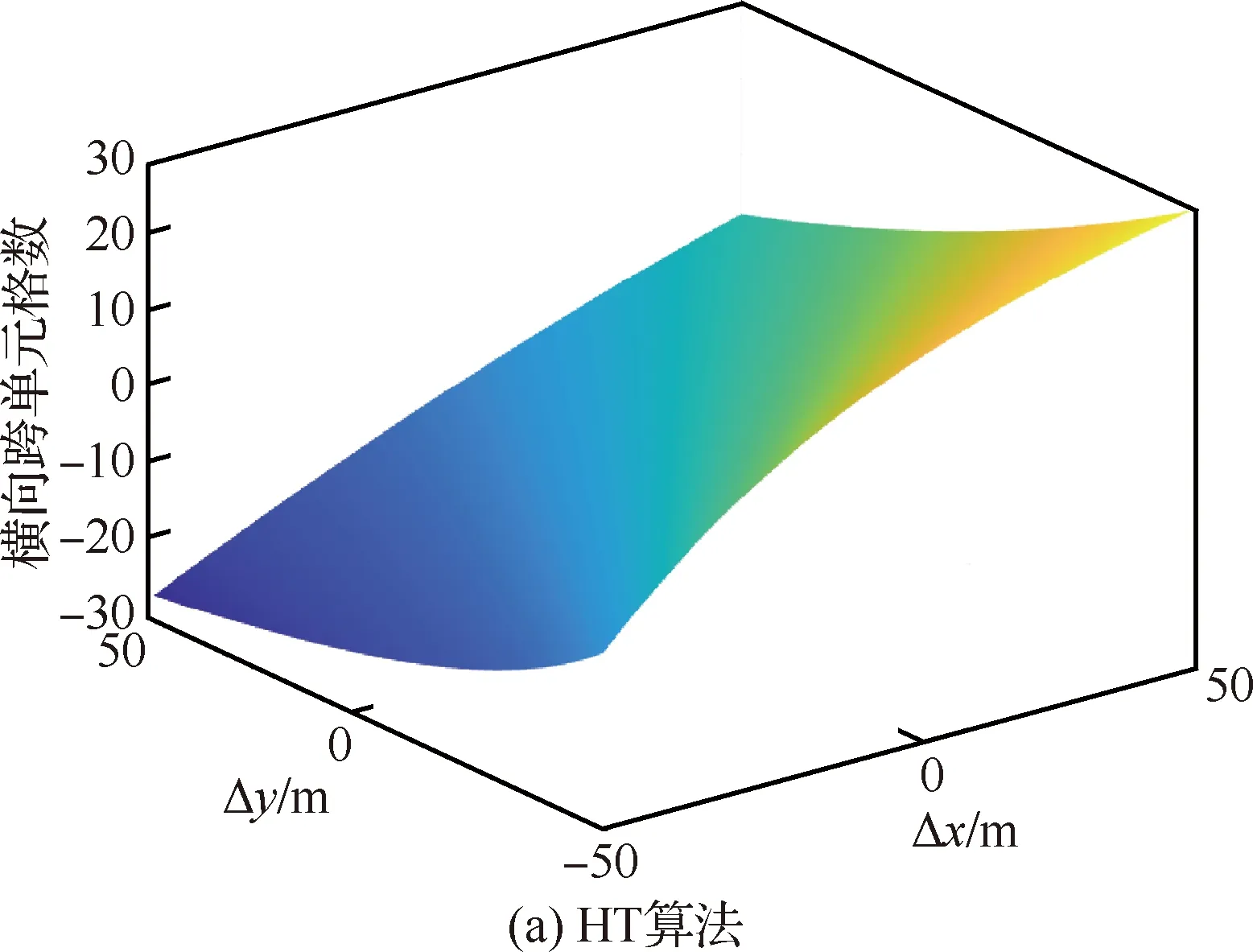
圖13 2種算法橫向跨單元格數目Fig.13 Number of horizontal cross-cells of two algorithms
此時的結果表現為,在產生相同量測誤差的情況下,2種算法產生了相同趨勢的橫向跨單元格數,但HT算法產生的橫向跨單元格數要少于PT算法產生的橫向跨單元格數。再將各自量測誤差情況下產生的橫向跨單元格數代入式(34)中計算其縱向產生的偏差,得到結果如圖14所示。
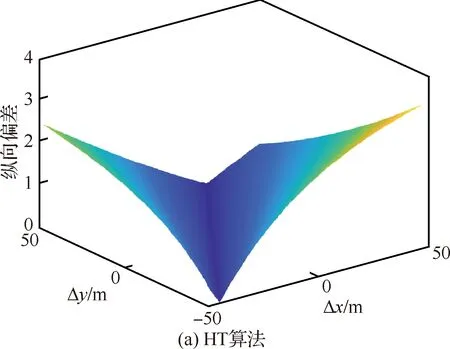
圖14 2種算法縱向偏差Fig.14 Longitudinal deviation of two algorithms
2種算法縱向偏差的差值圖如圖15所示。由結果可以看出,雖然在相同量測誤差下,HT算法比PT算法產生了更小的橫向偏差,但當代入式(34)后,HT算法總體上縱向偏差更大。由于在仿真計算時,直(曲)線采樣是按照橫向等間隔采樣,且實際中雷達存在量測誤差,因此在縱向產生更大偏差的HT-TBD算法將產生比PT-TBD算法更大的積累損失。
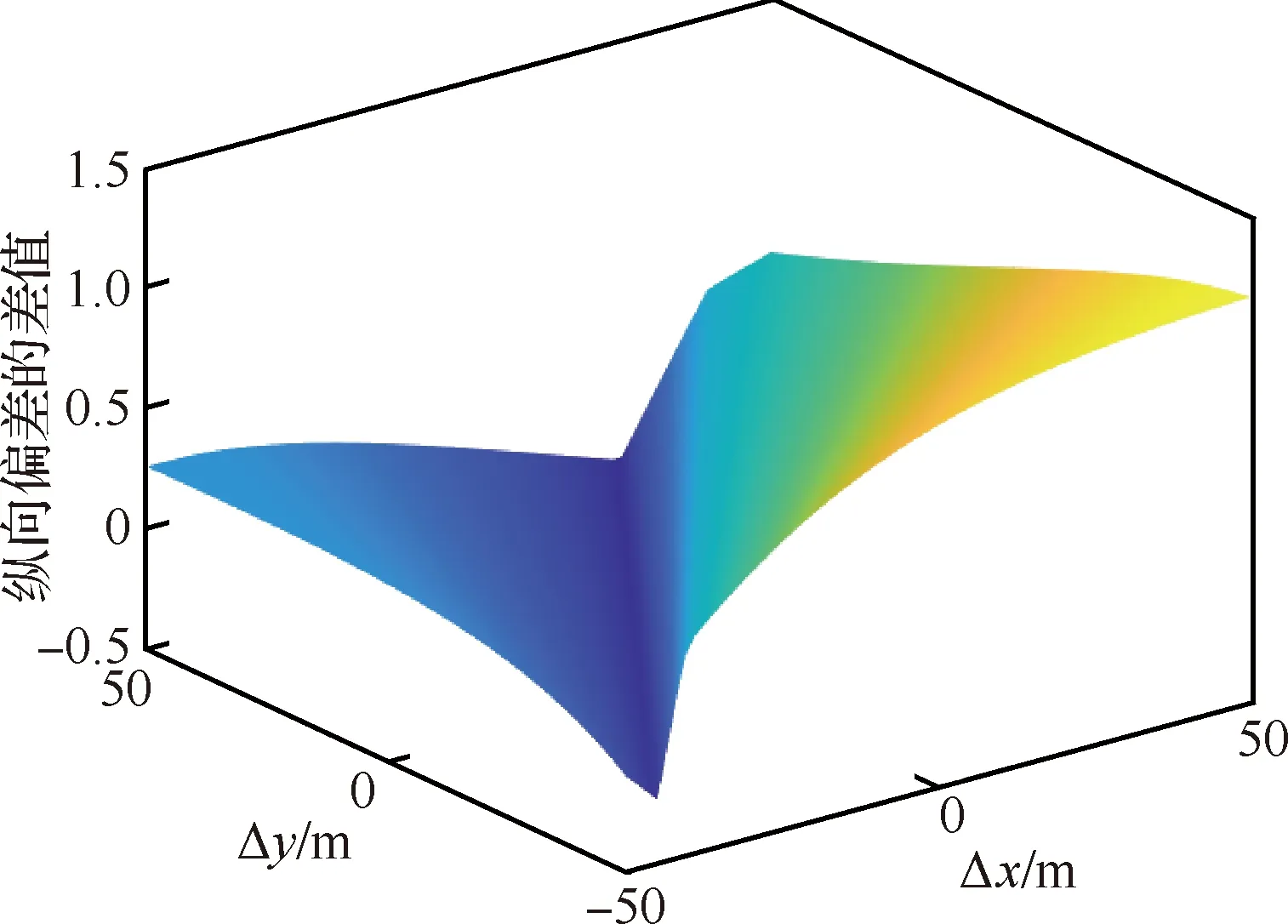
圖15 HT算法比PT算法縱向偏差的差值Fig.15 Difference longitudinal deviation of HT algorithm than that of PT algorithm
再按照3.1節設置的場景參數,假設只有目標1存在,在不同信雜比條件下同時進行平行線坐標變換和Hough變換,將2種變換后的平面均分割為360×360個單元并進行能量積累。在=300次的蒙特卡洛仿真中,PT-TBD算法與HT-TBD算法能量積累的最大值與目標航跡整體能量積累損失率為
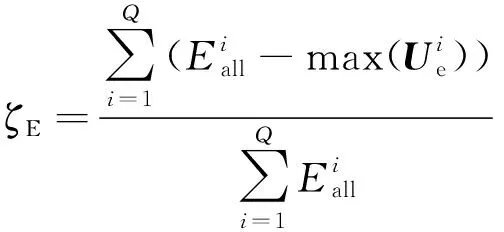
(38)

2種算法不同信雜比條件下的積累損失率如圖16所示。再通過相同環境設置,觀察2種方式能量積累的峰值大小比較結果如圖17所示。
由圖16和圖17明顯看出,2種算法在不同信雜比下均存在一定程度的積累損失,PT-TBD算法的平均積累損失率為1.68%,HT-TBD算法的平均積累損失率為2.96%,說明PT-TBD算法的積累損失要小于HT-TBD算法。由于探測范圍內只設置單個目標且信雜比均不低于0 dB,因此理想情況下能量積累最大值與目標航跡能量積累值應當相同,出現積累結果不等的原因是當目標不以嚴格直線軌跡運動時,量測點變換成直線后不會嚴格交于一點,導致部分量測點無法正常積累。
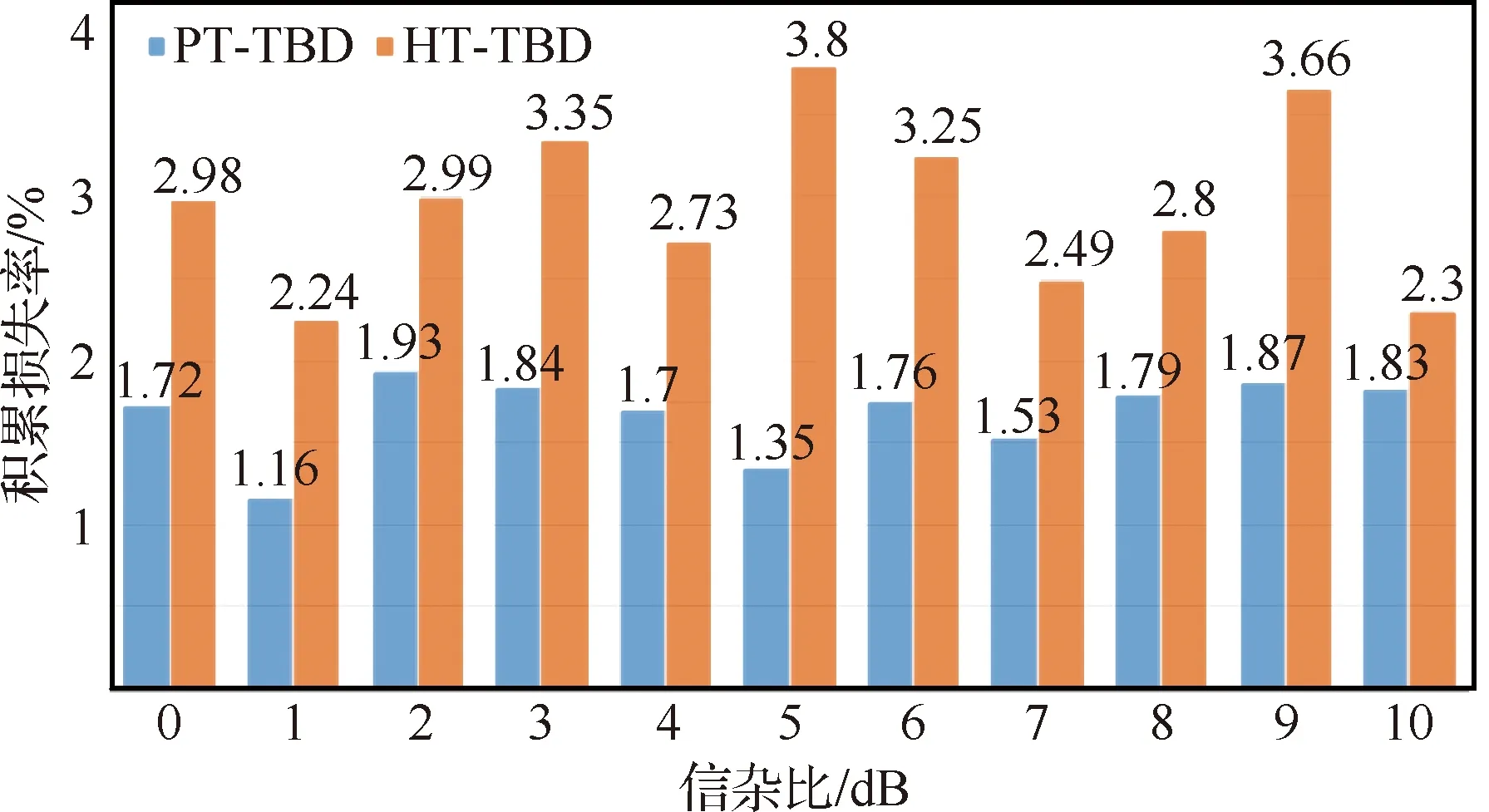
圖16 不同信雜比條件下的積累損失率Fig.16 Cumulative loss rate with different SCR
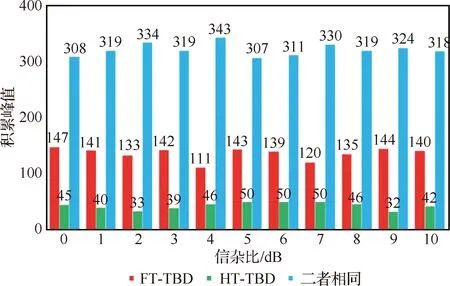
圖17 不同信雜比條件下的積累峰值大小對比Fig.17 Comparison of cumulative peak size with different SCR
由圖17可看出,3種情況所占比重在不同信雜比條件下大致相似。經計算得,有64.22%的概率2種算法的能量積累峰值相同,有27.18%的概率PT-TBD算法能量積累峰值更大,只有8.6%的概率HT-TBD算法最大能量積累峰值更大。
平行線坐標變換與Hough變換均是實現點到線的變換,不同的是,平行線坐標變換是實現點到直線的變換,而Hough變換是實現點到曲線的變換。當存在量測誤差時,曲線“凸”的性質加大了曲線落向參數平面內其他單元的可能,使得HT-TBD算法產生更大的積累損失。
圖18是沿直線飛行目標的3幀量測點分別采用平行線坐標變換和Hough變換的結果,其中量測的距離誤差為=20 m,方位角誤差為=001°。顯然,PT-TBD算法中存在有3條直線穿過的單元,而HT-TBD算法中不存在有3條直線穿過的單元,發生了積累損失。
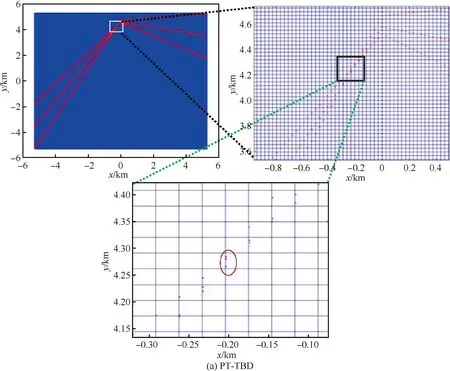
圖18 2種算法量測點變換線情況Fig.18 Conversion of measuring point to line in two algorithm
綜上所述,PT-TBD算法相對于HT-TBD算法的優點和原因是:
1) 檢測概率更高,積累損失更小,對微弱目標的檢測性能更好。具體原因是在網格化參數平面時,Hough變換所生成的曲線將比平行線坐標變換所生成的直線有更大的可能性落入不同的單元格內,造成更大的積累損失,從而降低目標的檢測概率。
2) 運算時間更短。具體原因是平行線坐標變換為線性變換,Hough變換是非線性變換。
算法仿真分析是按照算法理論分析中的假設進行參設設置,即認為目標軌跡方程的斜率>0。要特別說明的是,當目標軌跡方程的斜率≤0時結論仍然正確。
4 結 論
1) 平行線坐標變換為線性變換,Hough變換為非線性變換,導致PT-TBD算法運算時間比HT-TBD算法更短。
2) 在相同量測誤差和參數平面分割數目設置下,PT-TBD算法平均積累損失率為1.68%,HT-TBD算法的平均積累損失率為2.96%。說明PT-TBD算法積累損失更小從而擁有更高的檢測概率。
3)PT-TBD算法與HT-TBD算法的檢測概率均隨信雜比的升高而升高,但總體上看,PT-TBD算法的檢測概率要高于HT-TBD算法,且在信雜比小于4 dB時較為明顯。
4) 采用航跡修正步驟后,PT-TBD算法與HT-TBD算法產生的虛假航跡數相近。
5) PT-TBD算法仍屬于基于投影變換的檢測前跟蹤算法,對沿直線運動的目標檢測性能好,但不可避免的在面對機動目標時,檢測性能下降,仍有局限性。未來將會研究針對沿非直線運動目標的改進PT-TBD算法。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
