試驗(yàn)運(yùn)載器姿控總體優(yōu)化設(shè)計(jì)技術(shù)
2022-09-13 05:50:14于煜斌
宇航總體技術(shù) 2022年4期
鄭 新,趙 民,于煜斌,劉 琳
(1. 北京宇航系統(tǒng)工程研究所,北京 100076;2. 中國(guó)運(yùn)載火箭技術(shù)研究院,北京 100076)
0 引言
試驗(yàn)運(yùn)載器在初始起控階段,飛行高度低,需在大初始姿態(tài)偏差及氣動(dòng)干擾條件下保證穩(wěn)定控制。在有效載荷釋放階段,多通道多次連續(xù)大角度調(diào)姿動(dòng)作需要足夠的控制能力。而運(yùn)載器艙體結(jié)構(gòu)空間有限,姿控動(dòng)力系統(tǒng)布置困難,控制力臂有限。研制過(guò)程中,任務(wù)需求有較大程度調(diào)整,給控制能力需求帶來(lái)變化。以上各種因素給姿控總體方案的設(shè)計(jì)帶來(lái)了困難。
姿控總體從優(yōu)化總體方案、提高系統(tǒng)整體性能的角度出發(fā),采取多種優(yōu)化設(shè)計(jì)措施,主要如下:
1)鴨式直接力控制方案設(shè)計(jì);
2)滾動(dòng)通道姿控方案優(yōu)化設(shè)計(jì);
3)姿控動(dòng)力系統(tǒng)試車(chē)程序優(yōu)化設(shè)計(jì);
4)多通道連續(xù)大角度調(diào)姿方案設(shè)計(jì)。
通過(guò)以上幾種措施的綜合應(yīng)用,成功地解決了研制中遇到的多個(gè)技術(shù)難點(diǎn),設(shè)計(jì)出滿(mǎn)足任務(wù)要求且性能良好的姿控總體方案。
1 主要研究?jī)?nèi)容
1.1 鴨式直接力控制方案設(shè)計(jì)
運(yùn)載器艙體結(jié)構(gòu)空間有限,因飛行任務(wù)的需求,要將有效載荷布置在艙體尾段;還需要在尾段布置末修軌控發(fā)動(dòng)機(jī),使得艙體尾段剩余空間十分狹小。若要在艙體尾段剩余空間再布置姿控動(dòng)力系統(tǒng),則俯仰、偏航姿控發(fā)動(dòng)機(jī)的安裝平面靠近艙體縱向質(zhì)心位置所處橫截面,控制力臂太小,極大限制了俯仰、偏航通道的控制能力。
飛行任務(wù)的需求對(duì)運(yùn)載器的飛行高度進(jìn)行了約束,從而導(dǎo)致其初始起控階段存在較大的氣動(dòng)干擾。
級(jí)間分離過(guò)程對(duì)運(yùn)載器艙體產(chǎn)生干擾,使得運(yùn)載器在初始起控階段存在較大的初始姿態(tài)偏差。同時(shí),為保證分離過(guò)程可靠,防止發(fā)生碰撞,要求在達(dá)到有效分離距離后再啟動(dòng)姿控系統(tǒng)工作,造成運(yùn)載器在初始起控階段存在一定時(shí)間的失控飛行。
在有效載荷釋放階段,為完成飛行任務(wù),需進(jìn)行多通道的多次連續(xù)大幅調(diào)姿動(dòng)作,且要求在短時(shí)間內(nèi)完成,這就對(duì)姿控調(diào)姿能力提出了大的需求。
在綜合考慮姿控發(fā)動(dòng)機(jī)尺寸、質(zhì)量、可選推力值的情況下,經(jīng)過(guò)核算,若要保證運(yùn)載器在大初始姿態(tài)偏差及氣動(dòng)干擾作用下的初始段穩(wěn)定控制,以及大角度調(diào)姿階段的調(diào)姿能力需求,則無(wú)法在艙體尾段布置姿控動(dòng)力系統(tǒng)。
針對(duì)上述難題,通過(guò)結(jié)構(gòu)配置優(yōu)化布局、姿控發(fā)動(dòng)機(jī)推力需求設(shè)計(jì)及選型,充分利用艙體前中段的空間,將軌控發(fā)動(dòng)機(jī)布置于艙體前段;將俯仰、偏航姿控發(fā)動(dòng)機(jī)布置于艙體中前段,其推力作用線(xiàn)距離艙體理論尖點(diǎn)的距離小于艙體縱向質(zhì)心位置距理論尖點(diǎn)的位置,即俯仰、偏航姿控發(fā)動(dòng)機(jī)為鴨式控制布局,有效地增大了俯仰、偏航姿控發(fā)動(dòng)機(jī)的控制力臂長(zhǎng)度。
經(jīng)過(guò)多輪優(yōu)化迭代設(shè)計(jì),確定了最終姿控動(dòng)力系統(tǒng)布置方案,通過(guò)控制力需求計(jì)算和數(shù)學(xué)仿真分析,并經(jīng)過(guò)了飛行試驗(yàn)的考核,驗(yàn)證了此方案的可行性。
1.2 滾動(dòng)通道姿控方案優(yōu)化設(shè)計(jì)
研制初期,確定滾動(dòng)通道姿控發(fā)動(dòng)機(jī)推力需求時(shí),考慮到較高的姿態(tài)控制精度要求及空間結(jié)構(gòu)等因素的限制,姿控發(fā)動(dòng)機(jī)采用了單檔推力方案,且控制能力余量較小。
項(xiàng)目研制中,由于有效載荷質(zhì)量及飛行任務(wù)規(guī)劃的調(diào)整,運(yùn)載器初始段飛行軌跡高度明顯下降,飛行動(dòng)壓大幅增大,使得初始起控階段的氣動(dòng)干擾力矩大幅增加,滾動(dòng)通道干擾控制比如圖1 所示。
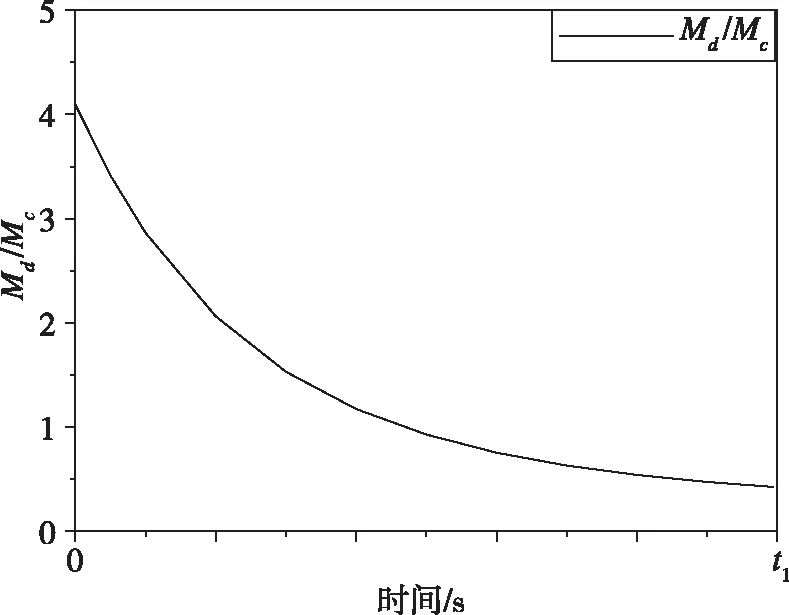
圖1 滾動(dòng)通道干擾控制比Fig.1 Rolling channel control disturbance ratio
由圖1可知,初始起控階段的干擾控制比在1.5~4之間,控制力遠(yuǎn)小于受到的干擾,不能穩(wěn)定控制姿態(tài)。
典型狀態(tài)的滾動(dòng)通道姿態(tài)數(shù)學(xué)仿真結(jié)果如圖2 所示。
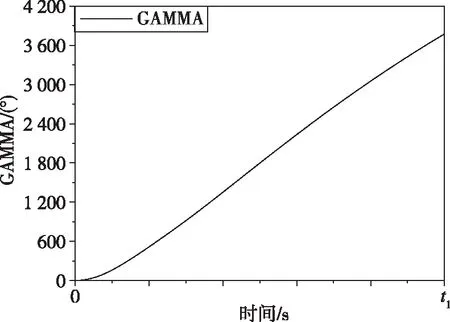
圖2 滾動(dòng)通道姿態(tài)仿真結(jié)果Fig.2 Rolling channel attitude simulation results
由圖2可知,由于控制能力嚴(yán)重不足,滾動(dòng)通道姿態(tài)GAMMA在初始起控階段迅速發(fā)散。考慮引入解耦控制,以保證運(yùn)載器在超過(guò)一定滾動(dòng)角速率下的俯仰和偏航通道姿態(tài)穩(wěn)定,但仿真結(jié)果中滾動(dòng)角速率超出敏感裝置量程,且在有效載荷釋放階段不能將滾動(dòng)角速率控制到要求值附近,方案不閉合。
為此,重新對(duì)姿控發(fā)動(dòng)機(jī)的控制力需求進(jìn)行核算,適當(dāng)增大姿控發(fā)動(dòng)機(jī)的推力值,以提高控制能力;但增大推力值后,難以滿(mǎn)足有效載荷釋放時(shí)的姿態(tài)控制精度要求。針對(duì)上述問(wèn)題,最直接的解決措施是采用兩檔變推力姿控發(fā)動(dòng)機(jī)布局方案;但因?yàn)榕擉w空間結(jié)構(gòu)、研制進(jìn)度、經(jīng)濟(jì)成本的限制,此措施無(wú)法實(shí)施。最終,姿控總體提出在一定程度上降低干擾力矩,同時(shí)適當(dāng)增大姿控發(fā)動(dòng)機(jī)推力值和推力響應(yīng)特性的折中方案。
首先,重新梳理了各干擾源及所占比重,通過(guò)降低滾動(dòng)通道結(jié)構(gòu)干擾、微抬飛行軌跡以減小動(dòng)壓,降低了氣動(dòng)干擾力矩;隨后,結(jié)合姿控發(fā)動(dòng)機(jī)的工程設(shè)計(jì)生產(chǎn)實(shí)現(xiàn)性,根據(jù)控制能力及控制精度要求,對(duì)姿控發(fā)動(dòng)機(jī)的推力和響應(yīng)特性需求指標(biāo)進(jìn)行了重新匹配優(yōu)化;最終,確定了滾動(dòng)通道的改進(jìn)姿控方案及相應(yīng)的姿控參數(shù)。
改進(jìn)方案的滾動(dòng)通道干擾控制比如圖3所示。
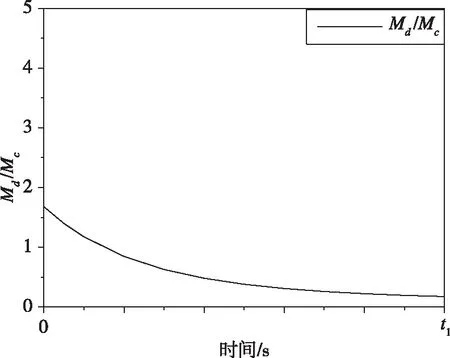
圖3 改進(jìn)方案的滾動(dòng)通道干擾控制比Fig.3 Rolling channel control disturbance ratio of the improved scheme
由圖3可知,改進(jìn)方案的滾動(dòng)通道干擾控制比與原方案相比有明顯下降。改進(jìn)方案的滾動(dòng)通道典型狀態(tài)姿控?cái)?shù)學(xué)仿真結(jié)果如圖4所示。
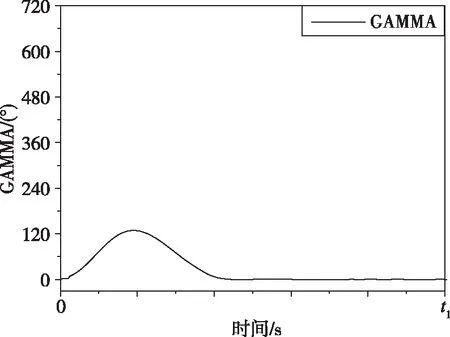
圖4 改進(jìn)方案的滾動(dòng)通道姿態(tài)仿真結(jié)果Fig.4 Simulation results of the rolling channel attitude of the improved scheme
由圖4可知,滾動(dòng)通道姿態(tài)GAMMA雖然在起控后的最初始段仍有一定程序的發(fā)散趨勢(shì),但由于控制能力的增加及干擾力矩的減小,姿控系統(tǒng)在較短時(shí)間內(nèi)抑制住了姿態(tài)的發(fā)散趨勢(shì),并實(shí)現(xiàn)了對(duì)姿態(tài)角和姿態(tài)角速率的穩(wěn)定控制,在有效載荷釋放階段前達(dá)到了要求的姿態(tài)控制精度。
1.3 姿控動(dòng)力系統(tǒng)試車(chē)程序優(yōu)化設(shè)計(jì)
為確保姿控動(dòng)力系統(tǒng)在整個(gè)飛行任務(wù)過(guò)程中穩(wěn)定可靠地工作,需要對(duì)姿控動(dòng)力發(fā)動(dòng)機(jī)的以下特性進(jìn)行考核。
1)推力室的冷、熱啟動(dòng)和冷、熱關(guān)閉特性,穩(wěn)態(tài)、脈沖工作特性。
2)變推推力室工作特性:0←→←→←→0的各過(guò)渡狀態(tài)工作過(guò)程和各穩(wěn)態(tài)工作過(guò)程。
3)短脈沖工作特性,此時(shí)只要求姿控發(fā)動(dòng)機(jī)系統(tǒng)保證功能,不要求其性能。
4)飛行中可能頻繁工作的姿控發(fā)動(dòng)機(jī),需要重點(diǎn)考核。
5)安排全部變推力俯仰偏航控制、滾控和軌控推力室同時(shí)工作,以考核最大工況下姿控動(dòng)力系統(tǒng)的推進(jìn)劑供應(yīng)能力。
據(jù)此,編制相應(yīng)的姿控動(dòng)力系統(tǒng)試車(chē)程序,并結(jié)合數(shù)學(xué)仿真結(jié)果進(jìn)行優(yōu)化調(diào)整,滿(mǎn)足既能考核到所有動(dòng)特性,又能與飛行時(shí)間、推進(jìn)劑消耗量匹配的需要。姿控動(dòng)力系統(tǒng)試車(chē)程序部分示意如圖5所示。
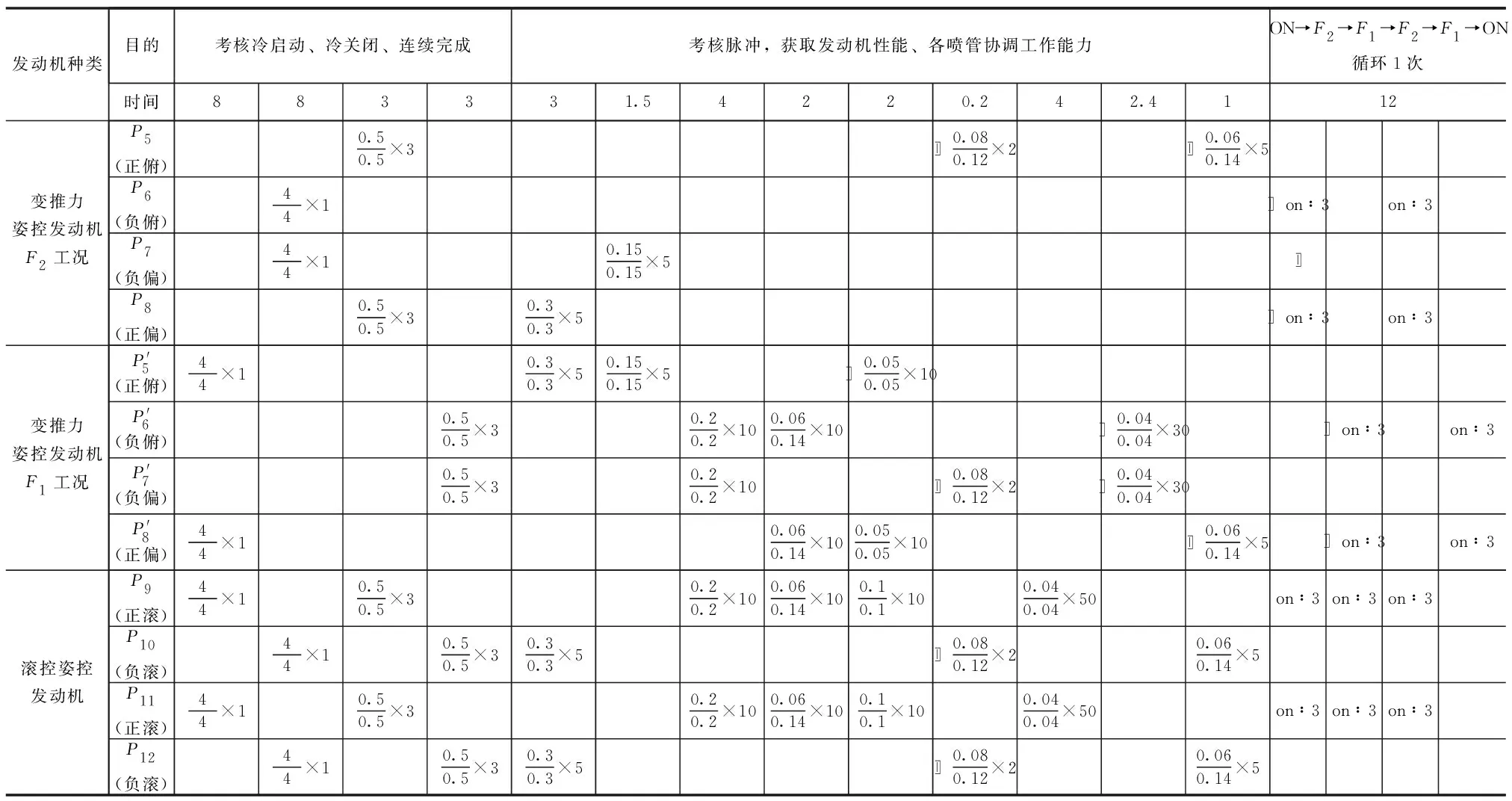
圖5 試車(chē)程序(部分)示意圖Fig.5 Schematic diagram of commissioning procedure (partial)
此姿控動(dòng)力系統(tǒng)試車(chē)程序的編制,是進(jìn)行姿控動(dòng)力系統(tǒng)整機(jī)熱試車(chē)的依據(jù),保證了后續(xù)設(shè)計(jì)工作的順利開(kāi)展。
1.4 多通道連續(xù)大角度調(diào)姿方案設(shè)計(jì)
試驗(yàn)中,嚴(yán)格要求在特定時(shí)間、特定空域、特性方位釋放所搭載的有效載荷。為此,需要結(jié)合飛行軌跡空域,進(jìn)行多通道多次連續(xù)大角度調(diào)姿動(dòng)作,并且要求運(yùn)載器在有效載荷釋放時(shí)刻達(dá)到要求的姿態(tài)控制精度。
為實(shí)現(xiàn)上述任務(wù)目標(biāo),需要詳細(xì)分析姿控動(dòng)力系統(tǒng)的控制及調(diào)姿能力,結(jié)合各偏差軌道的高度等參數(shù)的變化、有效載荷釋放時(shí)的空域和姿態(tài)要求、有效載荷釋放對(duì)運(yùn)載器姿態(tài)的干擾作用,進(jìn)行多通道多次連續(xù)大角度調(diào)姿動(dòng)作的多輪迭代優(yōu)化,以最終得到滿(mǎn)足設(shè)計(jì)要求的有效載荷釋放方案。
采用拋物線(xiàn)調(diào)姿方法,則調(diào)姿時(shí)間可通過(guò)如下公式來(lái)計(jì)算
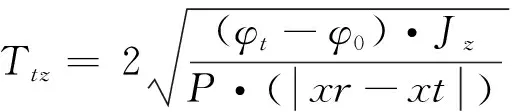
(1)
式中,各符號(hào)的含義如表1所示。

表1 符號(hào)含義Tab.1 Symbols
迭代流程示意圖如圖6所示。
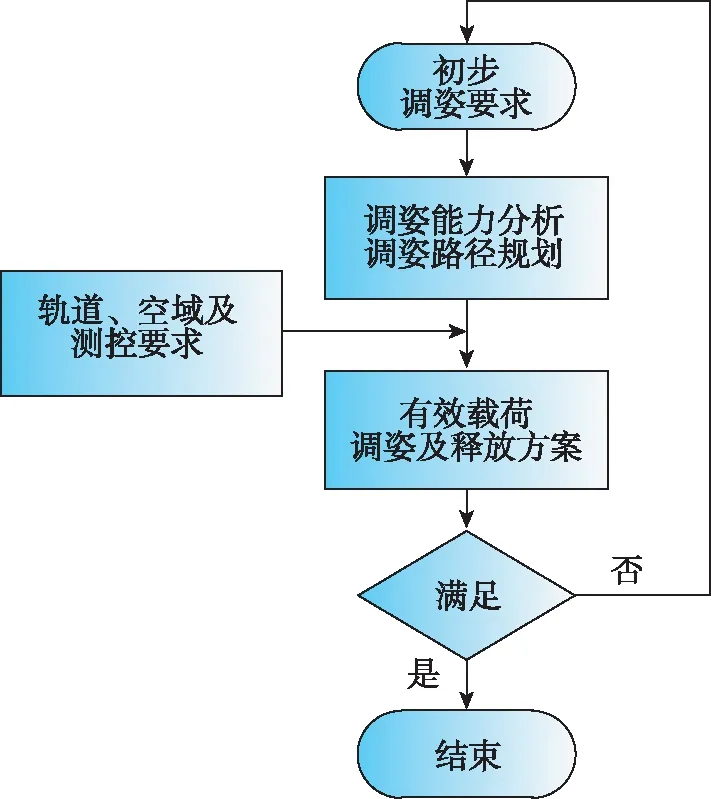
圖6 迭代流程示意圖Fig.6 Schematic diagram of iterative process
經(jīng)過(guò)多輪迭代優(yōu)化,并根據(jù)系統(tǒng)響應(yīng)特性,選取一定的調(diào)姿穩(wěn)定時(shí)間,確定最終的調(diào)姿釋放方案。
采用全量數(shù)學(xué)模型對(duì)典型的雙通道3次連續(xù)大角度調(diào)姿釋放方案進(jìn)行數(shù)學(xué)仿真驗(yàn)證,仿真中計(jì)入有效載荷釋放過(guò)程對(duì)運(yùn)載器的干擾作用,典型數(shù)學(xué)仿真結(jié)果參數(shù)如圖7、圖8所示。
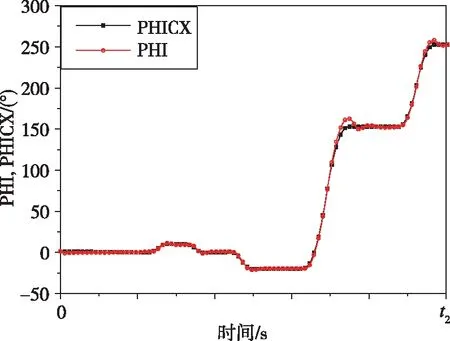
圖7 俯仰通道調(diào)姿仿真結(jié)果Fig.7 Simulation results of pitch channel adjustment attitude
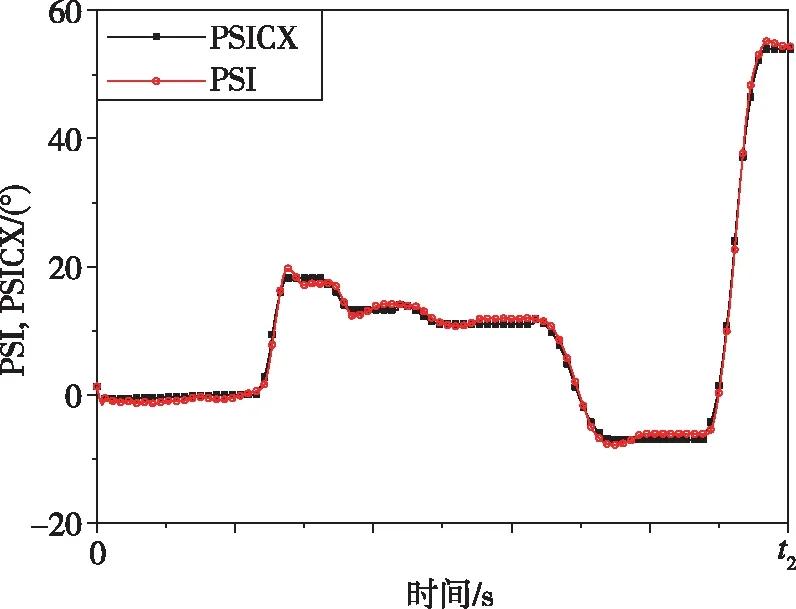
圖8 偏航通道調(diào)姿仿真結(jié)果Fig.8 Simulation results of yaw channel adjustment attitude
由以上數(shù)學(xué)仿真結(jié)果可知,在姿控系統(tǒng)控制作用下,俯仰、偏航兩個(gè)通道都實(shí)現(xiàn)了預(yù)期的3次連續(xù)大角度調(diào)姿動(dòng)作,姿態(tài)角PHI、PSI均分別實(shí)現(xiàn)了對(duì)程序姿態(tài)角PHICX、PSICX的高精度跟蹤,在調(diào)姿穩(wěn)定段達(dá)到了有效載荷釋放時(shí)的姿態(tài)控制精度要求。
2 總結(jié)
針對(duì)試驗(yàn)運(yùn)載器,通過(guò)鴨式直接力控制方案設(shè)計(jì)、滾動(dòng)通道姿控方案優(yōu)化設(shè)計(jì)、多通道連續(xù)大角度調(diào)姿方案設(shè)計(jì)等技術(shù),成功解決了姿控動(dòng)力系統(tǒng)控制能力不足、有效載荷按需釋放等難題。縮短了項(xiàng)目周期,降低了經(jīng)濟(jì)成本,為整個(gè)研制工作的順利開(kāi)展及飛行試驗(yàn)的成功起到了至關(guān)重要的作用。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
民用飛機(jī)設(shè)計(jì)與研究(2019年2期)2019-08-05 01:33:40
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
汽車(chē)與新動(dòng)力(2015年1期)2015-02-27 12:11:01
汽車(chē)與新動(dòng)力(2013年5期)2013-03-11 16:08:17