井下巡檢機器人浮動式移動底盤設計與分析
2022-09-15 08:42:00王成軍王智慧
機床與液壓 2022年15期
關鍵詞:溝槽
王成軍,王智慧
(1.深部煤礦采動響應與災害防控國家重點實驗室,安徽淮南 232001;2.安徽理工大學人工智能學院,安徽淮南 232001)
0 前言
井下巡檢機器人可實時勘測現場狀況進行風險評估,并對預警內容進行快速有效的傳遞,與傳統人工巡檢相比,其巡檢效率大幅度提升。推進井下巡檢崗位機器人替代,踐行“無人則安”的安全生產新理念,是實現煤礦智能化、無人化的重要表現。
特殊且復雜的作業環境,要求巡檢機器人具備高效穩定的行走能力。目前,巡檢機器人的移動方式有輪式、履帶式、腿式以及輪履式等組合形式。其中,輪式機器人能在平坦路面高速穩定地運動,但當地面坑洼不平或者具有爬坡等需求時,輪式結構適應能力明顯降低。如中國煤炭科工集團太原研究院有限公司研制的礦井輪式物料運輸機器人,采用四輪驅動,在井下行駛速度不低于20 km/h,但是越障效果不理想。履帶式移動底盤種類繁多,如中國礦業大學研制的六履帶四擺臂機器人,越障效果良好,但是結構較為復雜,運行速度較低,能耗較大。腿式移動結構,能適應復雜地形,越障效果良好,但是其控制難度較大,且在越障過程中容易發生重心不穩導致側翻等現象。如ATHLETE機器人腿部結構對電機要求較高,且控制較為復雜。
針對上述情況,提出一種基于浮動式懸架的雙擺臂輪履復合式移動底盤設計方法。巡檢機器人通過調節浮動式懸架來適應煤礦井下非結構化、不確定和復雜未知的環境,并通過輪履配合型作業達到在井下越障及平穩快速運行的效果,從而使機器人上端所載信息采集設備能夠準確捕捉井下未知環境。
1 巡檢機器人移動底盤結構設計
1.1 總體方案設計
巡檢機器人移動底盤采用對稱結構,主要由輪組、擺臂、動力輸出裝置、擺臂驅動裝置、浮動式懸架與車架組成,如圖1所示。動力輸出裝置分為兩部分:前動力輸出裝置由電機、減速器和同步帶等組成,電機輸出動力通過同步帶傳輸到前輪與擺臂的主動輪;后動力輸出裝置包括電機、減速器和后輪傳動輸入軸。

圖1 巡檢機器人移動底盤總體結構
擺臂裝置由履帶、行走架、滑動導軌、主動輪、從動輪與張緊裝置組成,如圖2所示。行走架通過傳動軸與電機、減速器相連,實現擺臂抬起和下降;擺臂輪轂與前輪輪轂通過螺栓相連,實現擺臂的主動輪與前輪同步運動。行走架與滑動導軌相連,實現履帶主、從動輪的動力傳輸,進而實現擺臂沿路面行走,如圖3所示。移動底盤的主要技術參數如表1所示。

表1 移動底盤的主要技術參數
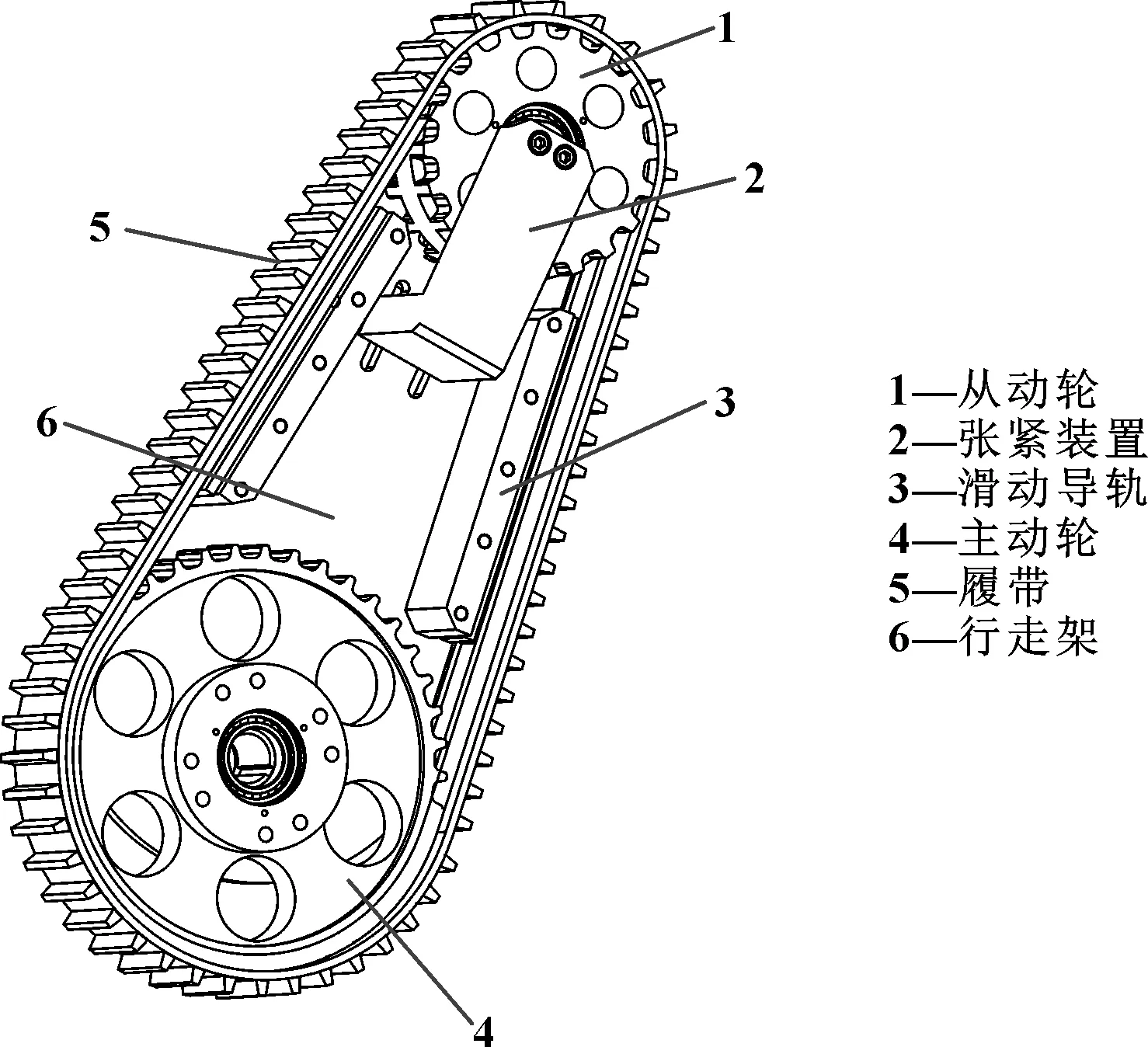
圖2 擺臂組件
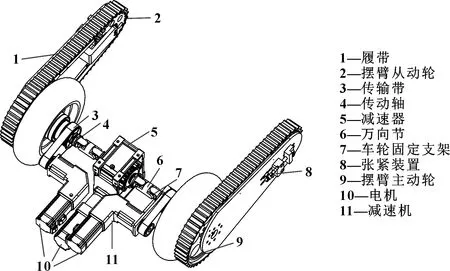
圖3 輪履動力輸出裝置
巡檢機器人移動底盤工作原理:當巡檢機器人在結構化平整路面上移動時,左右擺臂在擺臂驅動裝置作用下抬起,此時以輪式運動為主,達到快速行走的目的;當井下環境比較坑洼不平或者跨溝時,擺臂在擺臂驅動裝置的作用下,下降到與地面接觸,在動力輸出裝置作用下沿地面行走,此時運動形式是輪履結合運動;通過增大履帶與地面的接觸面積,增強機器人移動底盤對路面的適應性;當遇到階梯式障礙時,擺臂抬起合適角度與障礙物接觸,前、中、后輪依次進行越障。中間兩輪的設計可以有效避免因前后輪距較大、障礙物卡在底盤中間造成巡檢機器人停滯不前或底盤受損等現象。
1.2 浮動式底盤設計
為提高巡檢機器人地面適應性,設計一種浮動式懸架,由安裝支座、V形杠桿、板簧、連桿、Y形杠桿組成。浮動式懸架呈對稱形式,通過安裝支座固定在車架上,3塊板簧通過連桿機構與V形杠桿與Y形杠桿連接,如圖4所示。整個浮動式懸架具有2個自由度,通過V形杠桿與Y形杠桿實現底盤的上下浮動,連桿機構可實現左右移動。在豎直方向上的提升距離可達55 mm,以保證車輪根據地形進行自適應調節。
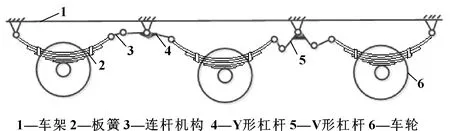
圖4 浮動式底盤結構簡圖
2 井下巡檢機器人越障機制
機器人越障是指機器人主體在行走機構的驅動下,質心越過障礙關鍵邊界線,并在慣性作用下繼續前進完成翻越,在此過程中不發生傾翻與卡阻等現象,能繼續保持機器人的穩定姿態與移動能力。
2.1 階梯式越障原理
正常情況下,擺臂抬起與地面存在一定傾斜角度。當機器人遇到障礙且障礙物高度高于車輪半徑時,擺臂在履帶電機的驅動下,擺臂靠近臺階使其履帶前端停靠在臺階的外交線上,如圖5(a)所示;動力輸出裝置與擺臂驅動裝置輸出動力使擺臂主動輪和前輪停靠在臺階上,如圖5(b)所示;由于相鄰兩對輪組之間距離小,在電機驅動下,擺臂順時針向下轉動使其重心降低,中間輪子迅速停靠在障礙物的外角線上,當巡檢機器人質心越過臺階的外角線時,表示越障成功,如圖5(c)所示;當后輪爬上障礙物時,表示越障結束,如圖5(d)所示。巡檢機器人越障過程如圖5所示。
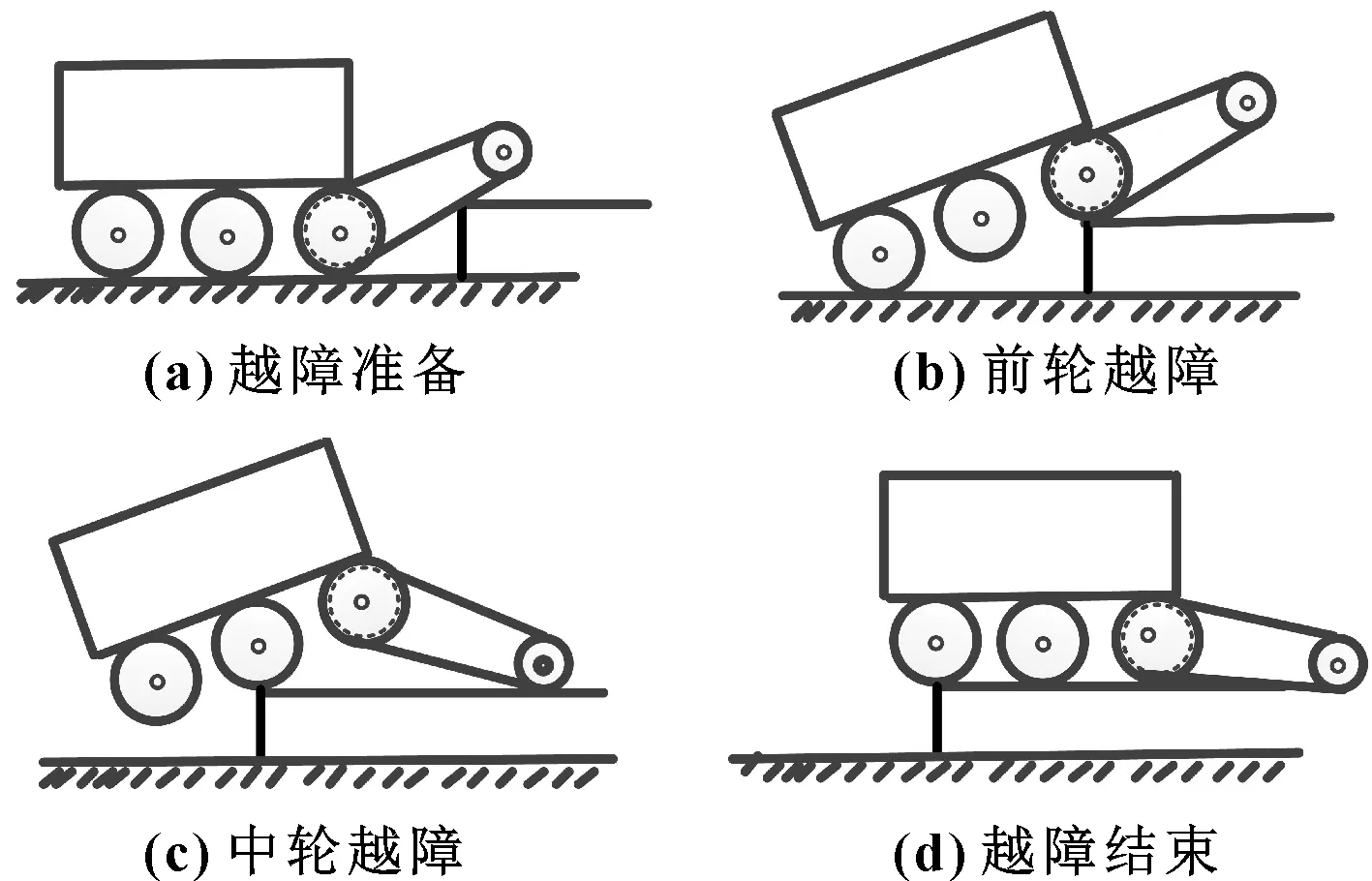
圖5 巡檢機器人越障過程
2.2 底盤越障質心位置分布
以巡檢機器人移動底盤后輪軸心為坐標原點建立坐標系,前后兩輪軸心的距離為,主體部分質量為,質心的坐標為(,),在攀越障礙時需要2個擺臂同時運動,單擺臂的質量為,質心在的連線上,為的距離,擺臂的夾角為,主體部分的車輪半徑為,擺臂的主動輪半徑為,從動輪半徑為,履帶厚為,如圖6所示。底盤的結構參數如表2所示。

表2 底盤結構參數
根據圖6求得機器人質心的坐標為

圖6 巡檢機器人質心位置示意

(1)
將公式(1)化簡為

(2)
2.3 越障高度分析
在翻越階梯式障礙時,通過輪履配合發揮巡檢機器人移動底盤的越障能力。當底盤的質心線正好通過臺階的外角線時,底盤達到能夠越過障礙的極限狀態,如圖7所示。

圖7 巡檢機器人越障極限狀態
根據圖7中的幾何關系,可計算出底盤越障高度為

(3)
將式(2)的質心坐標代入公式(3)得:


(4)
式中:表示臺階的高度;表示機器人仰角;表示擺臂擺角。
對、分別求偏導得:
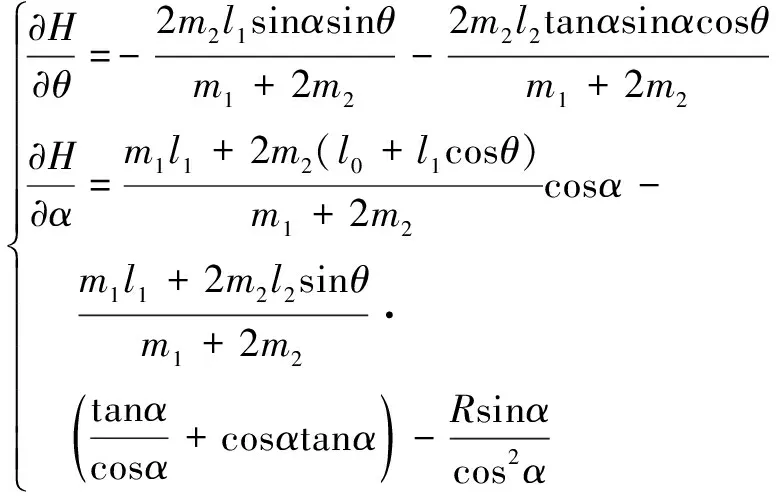
(5)
求二次偏導得:

(6)

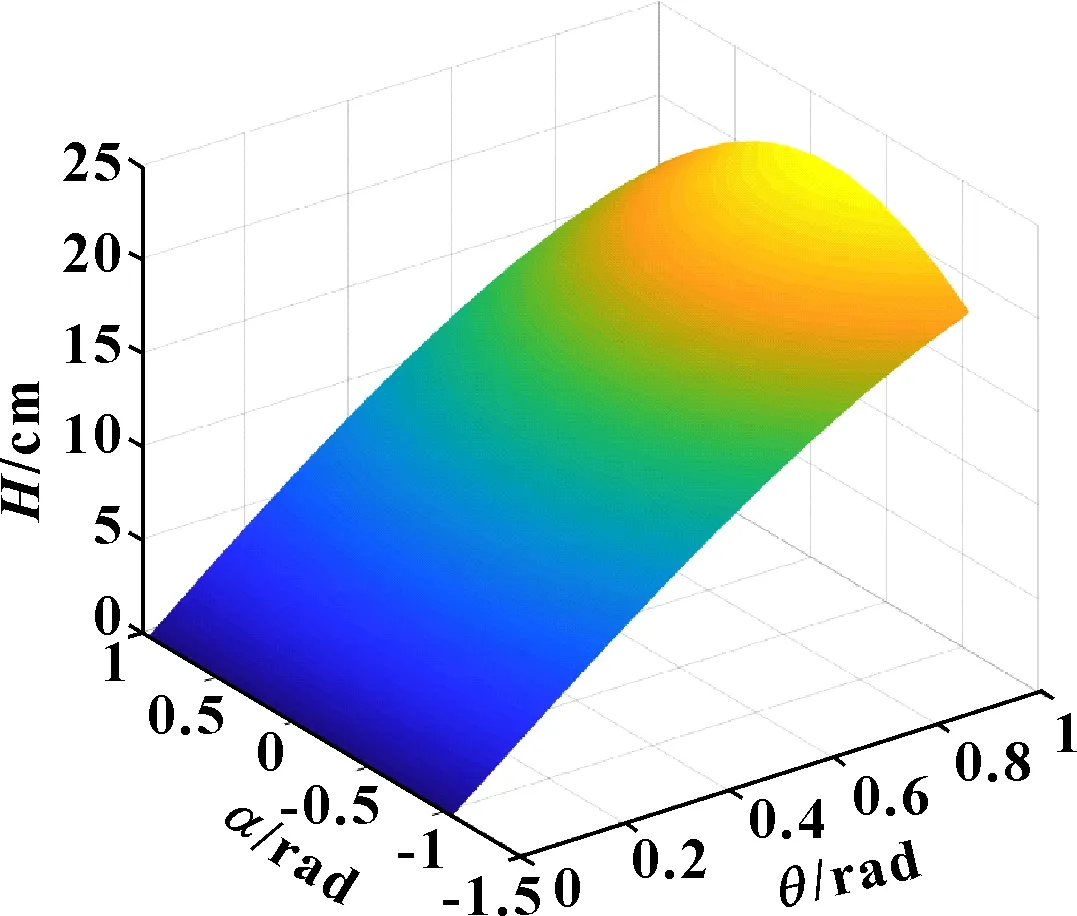
圖8 越障高度與仰角、擺角之間的三維關系
2.4 跨溝原理
溝槽是井下常見的地形之一,機器人能跨越最大的溝槽寬度與機器人底盤的質心位置、擺臂長度及車輪半徑等有關。機器人越溝過程如圖9所示。當巡檢機器人跨越溝槽時,擺臂處于平放狀態,如圖9(a)(b)所示。當巡檢機器人質心恰好通過溝槽的近側邊緣線時,機器人開始發生傾翻,而機器人前輪恰好與溝道的另一邊相切,此時跨溝寬度為機器人能達到的最大跨溝寬度,如圖9(c)所示。當中輪越過溝槽的遠側邊界線時,表示跨溝結束,如圖9(d)所示。
當機器人處于圖9(c)狀態時,機器人越溝達到最大寬度,此時寬度為
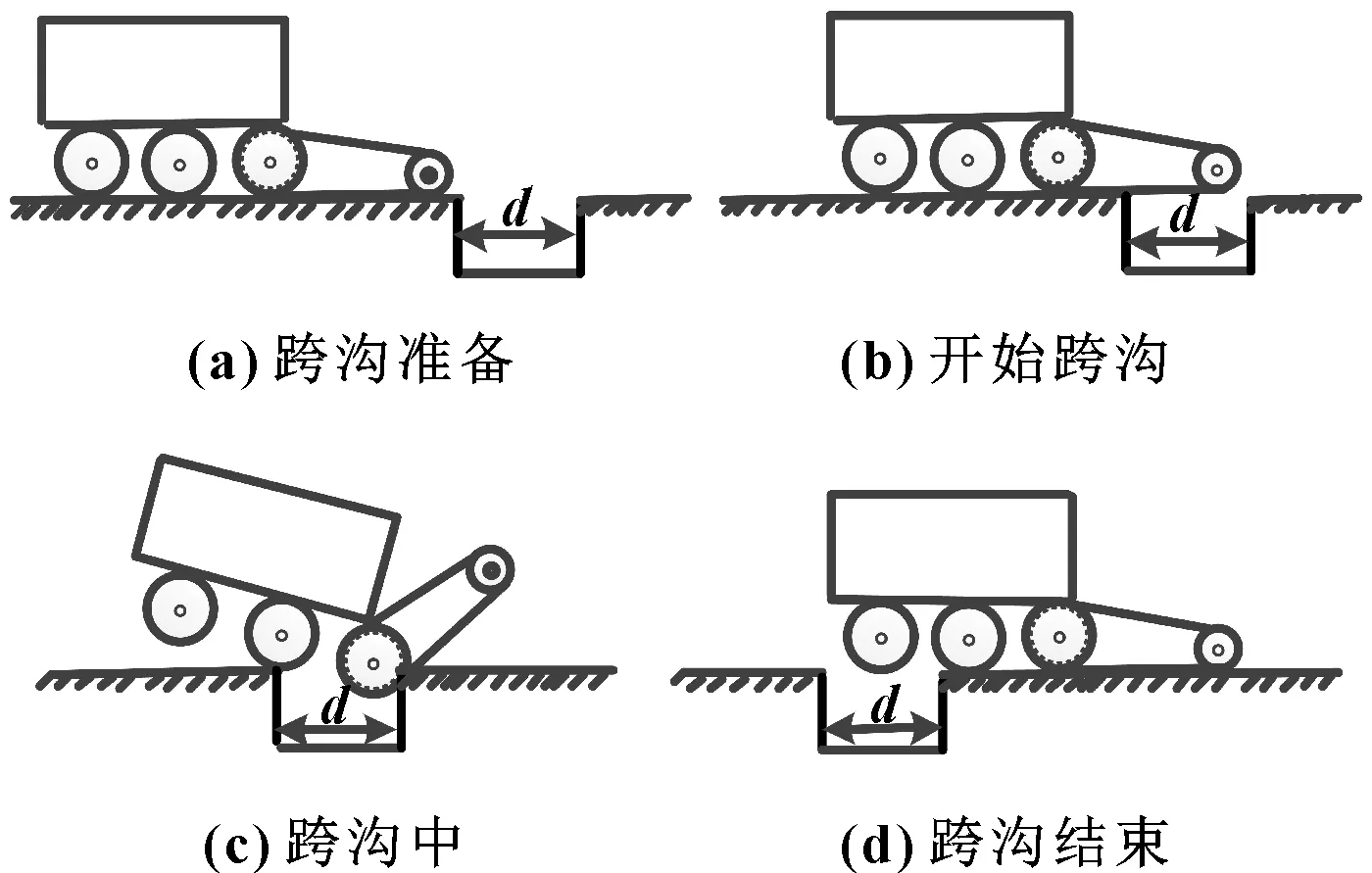
圖9 巡檢機器人跨溝過程
將表2的數據代入公式,得到巡檢機器人最大跨溝寬度為657.61 mm。
3 仿真實驗分析
在不影響仿真精度且提高仿真效率的前提下,對巡檢機器人移動底盤的三維模型進行簡化處理。將機器人三維模型導入ADAMS/View的仿真環境中,設置各個部件的材料屬性并添加運動副和驅動。添加輪胎與地面接觸力,設置庫侖摩擦力,靜摩擦因數為0.3,動摩擦因數為0.1,對巡檢機器人進行階梯式路面、溝槽路面和坑洼路面運動仿真。
3.1 階梯式越障分析
在Design Exploration中,建立傳感器sensor1,添加擺臂與臺階的接觸力。當傳感器檢測到擺臂與臺階垂直面接觸力大于0時,擺臂順時針轉動合適角度,前輪驅動力變大使前輪越過障礙。在Simulation中創建新的腳本,設置腳本類型為ADAMS Solver命令。
巡檢機器人階梯式路面運動仿真過程,如圖10所示。井下路面越障包含3個高度,初始路面建立在坐標系原點上,機器人質心距離初始地面相對高度為332 mm,第一臺階障礙高度為160 mm,第二臺階障礙高度為180 mm,第三臺階障礙高度為190 mm。
圖10 巡檢機器人階梯式路面運動仿真過程
利用ADAMS/View后處理模塊可得到巡檢機器人在井下路面運動的質心位置曲線、質心加速度曲線和速度曲線,分別如圖11—圖13所示。

圖11 機器人質心高度曲線 圖12 機器人質心加速度曲線
圖13 機器人質心速度曲線
巡檢機器人在路面行駛的平穩性可根據其質心的高度變化曲線來判斷。由圖11可知:當巡檢機器人質心高度到達492 mm時,表明機器人成功越過高度為160 mm的臺階;在為6.7~7.8 s內,機器人越過第2個障礙,此時質心高度達到672 mm;在為10~11.2 s內,機器人越過最后1個障礙,質心高度達到862 mm。3次越障過程中,巡檢機器人質心位置呈臺階式上升,小范圍內出現上下波動,總體曲線比較平穩。
由圖11—圖13可知:在第2.8、6.7、10 s附近,質心加速度出現了突變,速度明顯減小,機器人的質心位置明顯上升,表明機器人前輪觸碰臺階開始越障;在第10 s附近,加速度絕對值突變達到了最大,推測機器人越障臺階高度達到了190 mm,巡檢機器人的驅動力矩變大。如圖12所示,在機器人非越障情況下,質心加速度大小基本在0附近浮動,且浮動范圍不大。此外,由圖13可知,質心速度相對較為平穩,基本在470 mm/s附近波動。表明:當機器人質心高度發生改變時,浮動式底盤的設計能夠有效起到緩沖作用。充分驗證浮動式底盤設計的合理性,機器人具有平穩運行及越障的能力。
3.2 越障高度驗證
圖14所示為巡檢機器人翻越高度為190 mm臺階的仿真越障過程,可知該器人具有成功翻越障礙能力。

圖14 巡檢機器人越障仿真過程
為驗證巡檢機器人最大越障高度,改變第三臺階高度,設置第三臺階高度為200 mm時,機器人前輪能夠到達第三臺階,但機器人中輪始終未能踏上第三臺階,表明此臺階高度設定對機器人越障有一定難度。第三臺階高度分別為190、200 mm時,質心高度變化如圖15所示。

圖15 不同高度下的質心軌跡
多次改變臺階的高度進行驗證,巡檢機器人最大越障高度為194 mm,與理論計算存在一定誤差。這是因為輪胎和履帶本身存在彈性特性,在質心高度理論計算時,未考慮到該彈性特性在越障過程中引起的質心降低及驅動輪在攀爬過程中與路面的相對滑動等因素。
3.3 跨溝仿真分析
以路面為原點建立坐標系,設置路面上有溝槽,溝槽寬度分別為630、650 mm,巡檢機器人越溝過程如圖16所示。設置仿真時間為12 s,機器人質心高度變化曲線如圖17所示。

圖16 巡檢機器人跨溝仿真過程
圖17 機器人質心高度變化曲線(跨溝仿真)
由圖17可知:在為2.8~3.5 s與為9.5~10.2 s時,機器人質心高度曲線上下波動,機器人處于跨溝過程;在為2.8 s時,機器人質心高度下降,推測機器人前輪處于溝槽中;在為3.0~3.2 s時,質心高度上升,推測機器人前輪與壕溝的另一側相切,此時擺臂抬起,使質心高度上升;在為3.7 s時,機器人完成跨越寬度為630 mm的溝槽過程;為9.5~10.2 s為機器人跨越寬度為650 mm的壕溝過程,巡檢機器人質心高度相比于跨越630 mm壕溝的質心高度上下波動劇烈,推測機器人跨溝寬度接近極限值。多次改變溝槽寬度進行仿真,得到機器人跨越最大溝槽寬度為653 mm,與理論值誤差較小。
3.4 坑洼路面對浮動式巡檢機器人平穩性的影響
將浮動式懸架的V形桿、Y形桿及連桿機構去掉,中間增加2個安裝支座,使板簧兩端與安裝支座相連,即為巡檢機器人無浮動式懸架的移動底盤。將浮動式移動底盤和無浮動式移動底盤2種結構的巡檢機器人在相同的坑洼路面上進行運動仿真,如圖18所示。設置仿真時間為12 s,巡檢機器人質心高度變化曲線如圖19所示。
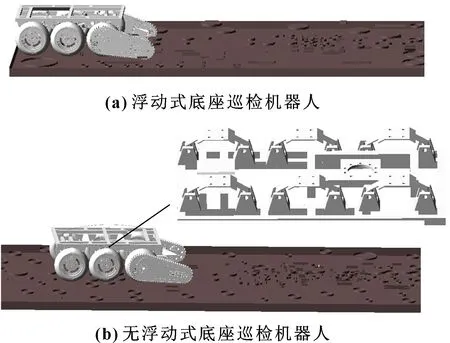
圖18 巡檢機器人坑洼路面運動仿真
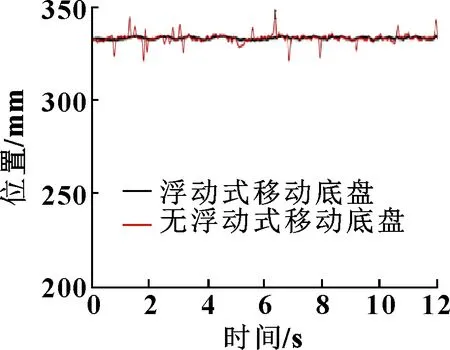
圖19 不同底盤結構巡檢機器人質心高度
由圖19可知:浮動式巡檢機器人在坑洼路面上行走的質心高度曲線近似一條平滑直線,上下波動較小,而無浮動式懸架的巡檢機器人在坑洼路面上的質心高度一直頻繁上下波動,表明機器人浮動式移動底盤在坑洼路面行走比較平穩。浮動式巡檢機器人移動底盤通過V形桿和Y形桿調節連桿機構實現移動底盤的上下浮動,使巡檢機器人對地形具有一定的自適應能力,進一步驗證了巡檢機器人浮動式移動底盤設計的合理性及優越性。
4 結論
(1)設計了一種煤礦井下巡檢機器人浮動式移動底盤,所設計的浮動式懸架可保證機器人在行走過程中,懸架能根據地形自適應調節,確保車輪與地面保持接觸,實現穩定支撐與行走。
(2)分析機器人攀爬臺階及跨越溝槽的越障機制,得到最大攀爬臺階高度及跨越溝槽寬度的理論值,并與仿真值進行對比分析。
(3)分別針對采用無浮動懸架與浮動懸架兩種結構的巡檢機器人底盤進行坑洼路況運動仿真實驗,結果表明:浮動式底盤能實現機器人質心平穩變化,對地形具有一定的自適應能力,驗證了浮動式移動底盤設計的可行性及優越性。
(4)運用ADAMS建立巡檢機器人浮動式底盤虛擬樣機,通過分析機器人質心位置及質心速度、加速度曲線,得出巡檢機器人運動具有良好的穩定性和越障性能,為巡檢機器人越障時質心位置控制提供參考。
猜你喜歡
艦船科學技術(2022年20期)2022-11-28 08:19:28
西北工業大學學報(2022年2期)2022-05-11 07:50:12
建材發展導向(2022年1期)2022-03-08 01:52:36
輪胎工業(2021年10期)2021-12-24 17:23:35
機械制造(2021年8期)2021-08-23 10:12:44
裝備制造技術(2020年3期)2020-12-25 05:22:30
輪胎工業(2020年9期)2020-03-01 18:58:44
中國機械工程(2018年14期)2018-09-22 01:14:04
電子制作(2018年14期)2018-08-21 01:38:30
江西理工大學學報(2015年3期)2015-12-22 05:26:21
