汽車主動(dòng)懸架系統(tǒng)的有限頻域輸出反饋控制
2022-09-15 06:22:36孟亞鵬李文鋒謝正超
機(jī)床與液壓 2022年12期
孟亞鵬,李文鋒,謝正超
(1.泛亞汽車技術(shù)中心有限公司,上海 201201;2.華南理工大學(xué)機(jī)械與汽車工程學(xué)院,廣東廣州 510640)
0 前言
作為汽車底盤中不可或缺的一部分,汽車懸架系統(tǒng)在提高乘坐舒適性、改善操縱穩(wěn)定性和優(yōu)化道路友好性方面起著非常重要的作用。懸架系統(tǒng)通常包含被動(dòng)懸架系統(tǒng)、半主動(dòng)懸架系統(tǒng)和主動(dòng)懸架系統(tǒng)3種類型。由于主動(dòng)懸架系統(tǒng)配備了一個(gè)獨(dú)立作動(dòng)器,能夠有效改善懸架系統(tǒng)各性能間的矛盾關(guān)系,進(jìn)而提升懸架系統(tǒng)的綜合性能,所以主動(dòng)懸架系統(tǒng)已經(jīng)成為當(dāng)前的研究熱點(diǎn)之一。近年來,大量的控制方法被開發(fā)應(yīng)用到主動(dòng)懸架系統(tǒng)上來,例如自適應(yīng)控制、滑模控制、預(yù)瞄控制、最優(yōu)控制和H控制等。值得注意的是,H控制方法在主動(dòng)懸架控制分析與設(shè)計(jì)中引起了較為廣泛的討論,尤其是在注重控制魯棒性和干擾抑制性能的背景下,更加引人關(guān)注。
在汽車懸架系統(tǒng)控制的分析與設(shè)計(jì)中,核心目標(biāo)是抑制路面干擾產(chǎn)生的振動(dòng),以提高汽車的乘坐舒適性。在現(xiàn)有的控制方法中,大多數(shù)都是針對(duì)全頻域的路面干擾進(jìn)行分析。然而現(xiàn)實(shí)中路面激勵(lì)的頻率往往屬于一個(gè)特定頻率區(qū)間。此外,根據(jù)ISO-2631,人體對(duì)4~8 Hz的垂直振動(dòng)更為敏感,甚至由于和人體器官的振動(dòng)頻率相近,二者產(chǎn)生共振,對(duì)人體造成傷害。因此,針對(duì)有限頻域約束的主動(dòng)懸架系統(tǒng)進(jìn)行控制分析與設(shè)計(jì)顯得更有意義。為了解決有限頻域下的控制問題,文獻(xiàn)[11]提出了一種廣義KYP引理,搭建了頻域不等式與時(shí)域線性矩陣不等式等價(jià)轉(zhuǎn)換的橋梁。基于廣義KYP引理,大量的研究成果被發(fā)表并獲得了較好的工程應(yīng)用。其中,SUN等針對(duì)主動(dòng)懸架系統(tǒng)提出了一種有限頻域控制方法,仿真結(jié)果驗(yàn)證了所提的有限頻域控制方法在特定頻率段內(nèi)能夠進(jìn)一步改善懸架的乘坐舒適性。值得指出的是,有限頻域控制能夠最大程度地抑制所關(guān)注頻域內(nèi)的擾動(dòng),而適當(dāng)放寬對(duì)其他頻域內(nèi)的擾動(dòng)抑制效果。然而,上述有限頻域控制方法必須在所有懸架狀態(tài)信息均能在線獲得的情況下才能作用于懸架系統(tǒng)。在實(shí)際懸架系統(tǒng)中必然存在部分狀態(tài)變量無法通過商用傳感器獲得的情況,因此上述方法具有嚴(yán)峻的可行性問題。基于此考慮,輸出反饋控制的研究漸漸引起了學(xué)者們的注意。文獻(xiàn)[16]提出了一種基于單步法的有限頻域靜態(tài)輸出反饋控制,但是該方法需要一個(gè)正定矩陣來完成變量替換,在存在時(shí)滯、不確定性等情況下該條件不能得到滿足。
因此,本文作者針對(duì)汽車主動(dòng)懸架系統(tǒng)提出了一種基于啟發(fā)式兩步法的有限頻域靜態(tài)輸出反饋控制方法。首先,提出一種特定頻域下的H性能指標(biāo)判據(jù),針對(duì)性考慮了敏感頻域內(nèi)擾動(dòng)的抑制性能,有助于進(jìn)一步提升車輛的乘坐舒適性;其次,提出一種有限頻域靜態(tài)輸出反饋控制的設(shè)計(jì)與優(yōu)化算法,消除了對(duì)完整狀態(tài)信息的在線依賴,保證了控制器的工程可行性;最后,通過數(shù)值仿真和臺(tái)架試驗(yàn)證實(shí)了該方法能很好地抑制外界擾動(dòng),從而有效地提高懸架系統(tǒng)的乘坐舒適性。
1 問題描述
文中考慮一種典型的二自由度1/4車主動(dòng)懸架模型,如圖1所示。
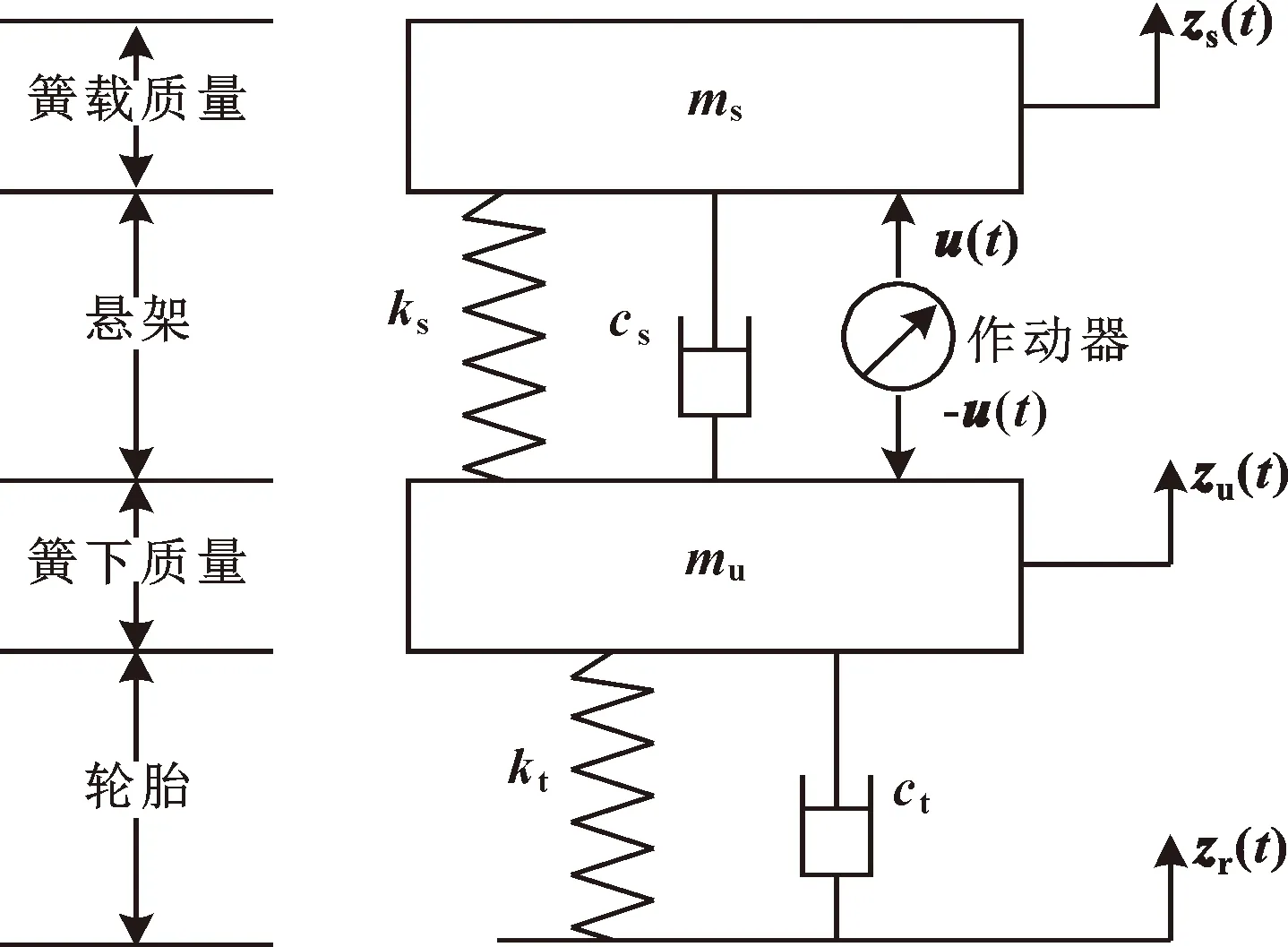
圖1 1/4車主動(dòng)懸架模型
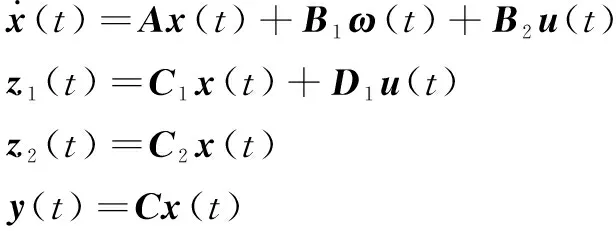
其動(dòng)力學(xué)方程如下:
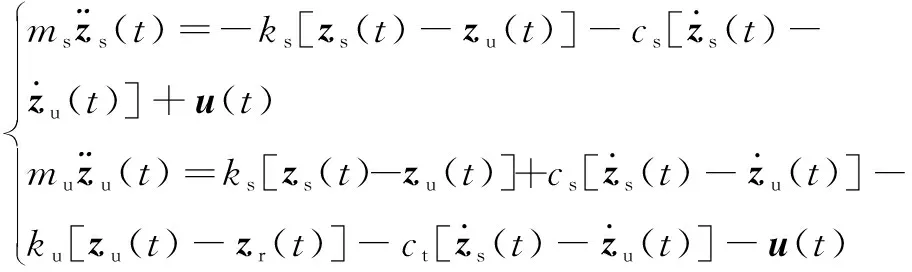
(1)
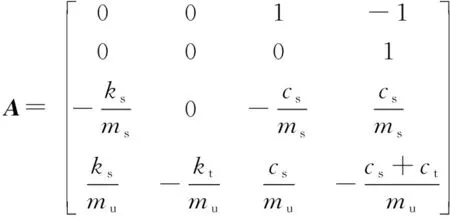
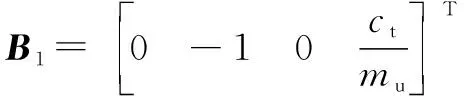
其中:和分別代表簧上質(zhì)量和簧下質(zhì)量;()、()和()分別代表車身位移、輪胎位移及路面干擾不平度;和分別表示懸架剛度和阻尼系數(shù);和分別代表輪胎剛度和阻尼系數(shù);()表示作動(dòng)器的主動(dòng)力。選取狀態(tài)向量如下:

(2)
由于()-()含有路面不平度信息,無法通過低成本傳感器獲得,故文中的測(cè)量輸出向量選取如下:
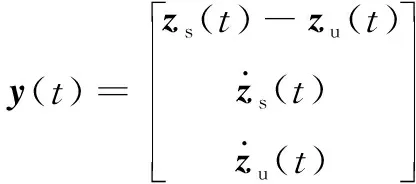
(3)

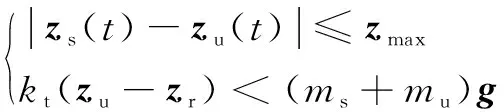
(4)
其中:表示懸架行程的最大值。

(5)
其中:



文中考慮的靜態(tài)輸出反饋控制器形式如下:
()=()=()
(6)
綜上所述,可以得到主動(dòng)懸架閉環(huán)系統(tǒng)表達(dá)式如下所示:
(7)
其中:=+,=,=+,=0。
文中的目標(biāo)是提出一種形式如式(6)的控制器設(shè)計(jì)方法,使得下列條件成立:
(1)閉環(huán)系統(tǒng)(7)在干擾為零的情況下漸近穩(wěn)定;
(2)使得車身加速度在考慮頻率范圍內(nèi)滿足H性能,即

(8)
其中:(j)表示到的傳遞函數(shù)。
(3)主動(dòng)懸架機(jī)械約束得到滿足,即
|[()]|≤1=1,2
(9)
2 控制設(shè)計(jì)
將提出一種基于啟發(fā)式兩步法的有限頻域靜態(tài)輸出反饋控制方法,以進(jìn)一步提升主動(dòng)懸架系統(tǒng)的綜合性能。首先,給出如下兩個(gè)引理。
引理1:針對(duì)任意線性狀態(tài)空間表達(dá)系統(tǒng)(,,,)和一個(gè)對(duì)稱矩陣,下面的兩個(gè)條件等價(jià):
(1)頻域內(nèi)的不等式:

(10)
(2)存在對(duì)稱矩陣和正定矩陣>0,下式成立:

(11)
其中:

首先,容易得知式(10)可以寫成如下形式:
<0
(12)
其中:
然后,通過選取Lyapunov正定函數(shù)()=()(),閉環(huán)系統(tǒng)(7)可以通過下面的不等式來保證漸近穩(wěn)定性要求:

(13)
其中:

引理2:給定正標(biāo)量、及控制器形式如式(6),閉環(huán)系統(tǒng)(7)滿足漸近穩(wěn)定性并且獲得期望性能(8)和(9),若存在對(duì)稱矩陣、>0,>0和一般矩陣、及一個(gè)正標(biāo)量使得下式成立:
(14)
(15)

(16)
則有限頻域狀態(tài)反饋增益系數(shù)的求解算式為
=
(17)
其中:[]表示+。
2.1 系統(tǒng)控制分析
綜上所述,給出系統(tǒng)控制分析的定理如下:
定理1:給定正標(biāo)量、及控制器形式如式(6),閉環(huán)系統(tǒng)(7)滿足漸近穩(wěn)定性并且獲得期望性能(8)和(9),如果存在對(duì)稱矩陣、>0,>0和一般矩陣和使得下式成立:
++<0
(18)

(19)
(20)
其中:如式(12)所示,如式(13)所示,且


對(duì)于上述定義的矩陣、、和,下列關(guān)系成立:


(21)

接下來討論的是主動(dòng)懸架系統(tǒng)的機(jī)械約束。基于上述討論,以下不等式成立:

(22)
對(duì)式(18)兩端同時(shí)進(jìn)行0到的積分,則以下不等式成立:


(23)



(24)
其中:(·)表示的是矩陣的最大特征值。因此,系統(tǒng)的機(jī)械約束(9)可以通過下式得到保證:

(25)
其中,基于舒爾補(bǔ)定理,式(25)可以改寫為式(20)。
至此,證明完成。
在定理1的基礎(chǔ)上,接下來提出一個(gè)用于控制器反饋系數(shù)求解的新定理,如下:
定理2:給定正標(biāo)量、及控制器形式如式(6),閉環(huán)系統(tǒng)(7)滿足漸近穩(wěn)定性并且獲得期望性能(8)和(9),如果存在對(duì)稱矩陣、>0,>0和一般矩陣、和使得下式成立:
++<0
(26)

(27)
(28)
進(jìn)一步,靜態(tài)輸出反饋系數(shù)的求解算式為
=
(29)
其中,,和的定義與前文一致,且


證明:根據(jù)式(19)容易得知+<0,即矩陣是可逆矩陣。接著作如下矩陣替換:
=,=()
(30)
因此,在定理1的基礎(chǔ)上,式(26)—式(28)成立。
至此,證明完成。
2.2 系統(tǒng)控制求解
定理2給出了一個(gè)求解靜態(tài)輸出反饋系數(shù)的充分條件,然而矩陣不等式中存在未知矩陣和的耦合。換言之,定理2的條件不再是線性矩陣不等式的形式了,無法直接求解。在文獻(xiàn)[17]的啟發(fā)下,未知矩陣可以提前設(shè)定為一個(gè)有限頻域狀態(tài)反饋增益,從而使得定理2中的矩陣不等式可以直接求解。由引理2得到一個(gè)有限頻域狀態(tài)反饋增益是可行的,在此基礎(chǔ)上,有限頻域靜態(tài)輸出反饋控制器可以通過求解下列優(yōu)化問題獲得:
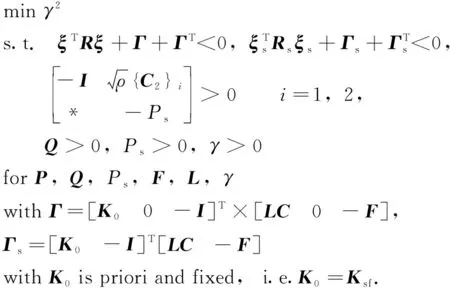
(31)
進(jìn)一步,文中提出的基于啟發(fā)式兩步法的主動(dòng)懸架系統(tǒng)有限頻域控制器求解步驟總結(jié)如下:
步驟 1,通過運(yùn)行引理2尋求一個(gè)合適的有限頻域狀態(tài)反饋增益系數(shù);
步驟 2,求解最優(yōu)化問題(31)并獲得期望的有限頻域靜態(tài)輸出反饋增益系數(shù)。
3 仿真分析與試驗(yàn)驗(yàn)證
為了評(píng)估和驗(yàn)證文中所提控制方法的有效性,采用圖2所示的主動(dòng)懸架設(shè)備進(jìn)行數(shù)值仿真和臺(tái)架試驗(yàn)。主動(dòng)懸架設(shè)備主要部件的介紹如圖2所示,懸架參數(shù)如表1所示。與控制求解相關(guān)的參數(shù)選取為=4 Hz,=8 Hz,=500及=0.9。通過MATLAB LMI工具箱的MINCX函數(shù),按照啟發(fā)式兩步法可以求解得到有限頻域輸出反饋控制的性能指標(biāo)為=4.290 2,其反饋增益系數(shù)為=[591.300 5 -66.097 3 -0.589 4]。
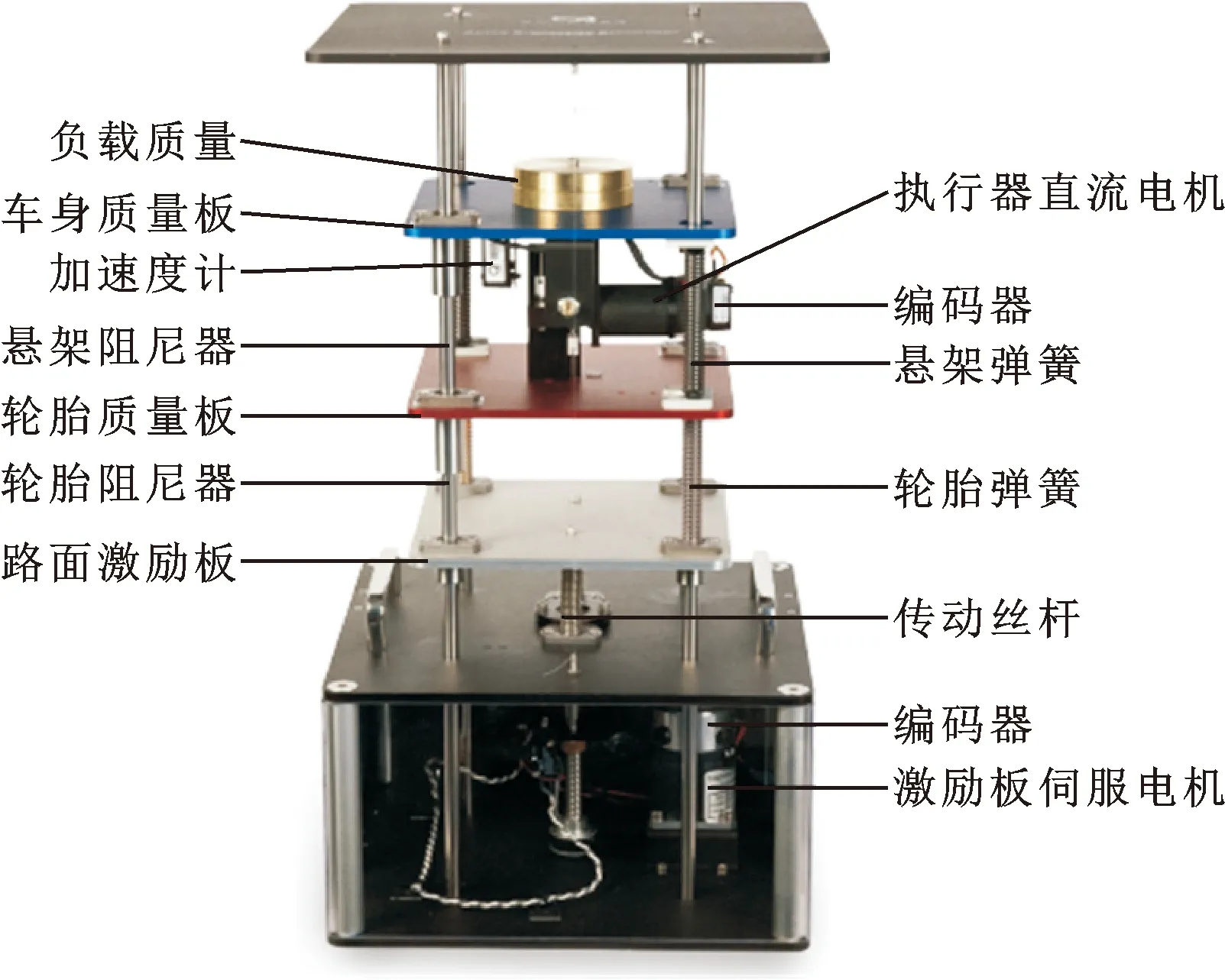
圖2 主動(dòng)懸架設(shè)備
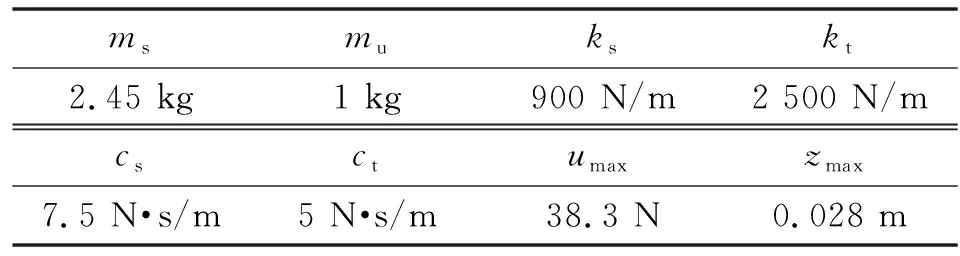
表1 主動(dòng)懸架試驗(yàn)臺(tái)參數(shù)
同樣地,根據(jù)所提有限頻域輸出反饋控制器設(shè)計(jì)的基本思路,可以獲得一個(gè)全頻域輸出反饋的性能指標(biāo)為=14.356 6,其反饋增益系數(shù)為=[460.166 7 -61.694 6 1.217 1]。
基于得到的控制器參數(shù),通過Bode函數(shù)可以得到如圖3所示的車身加速度頻域響應(yīng)曲線。可以看出:相比較無控制器的被動(dòng)懸架系統(tǒng),搭載有限頻域輸出反饋控制器和全頻域輸出反饋控制器的主動(dòng)懸架系統(tǒng)能夠產(chǎn)生較低的車身加速度,這說明兩種控制器均具有良好的干擾抑制性能;其次可以看出與全頻域輸出反饋控制器相比,有限頻域輸出反饋控制器在干擾抑制方面更具優(yōu)越性,這說明有限頻域控制器比全頻域控制器能更好地抑制路面擾動(dòng),從而獲得更好的乘坐舒適。換句話說,車身加速度頻域響應(yīng)驗(yàn)證了所提有限頻域輸出反饋控制方法的優(yōu)越性。
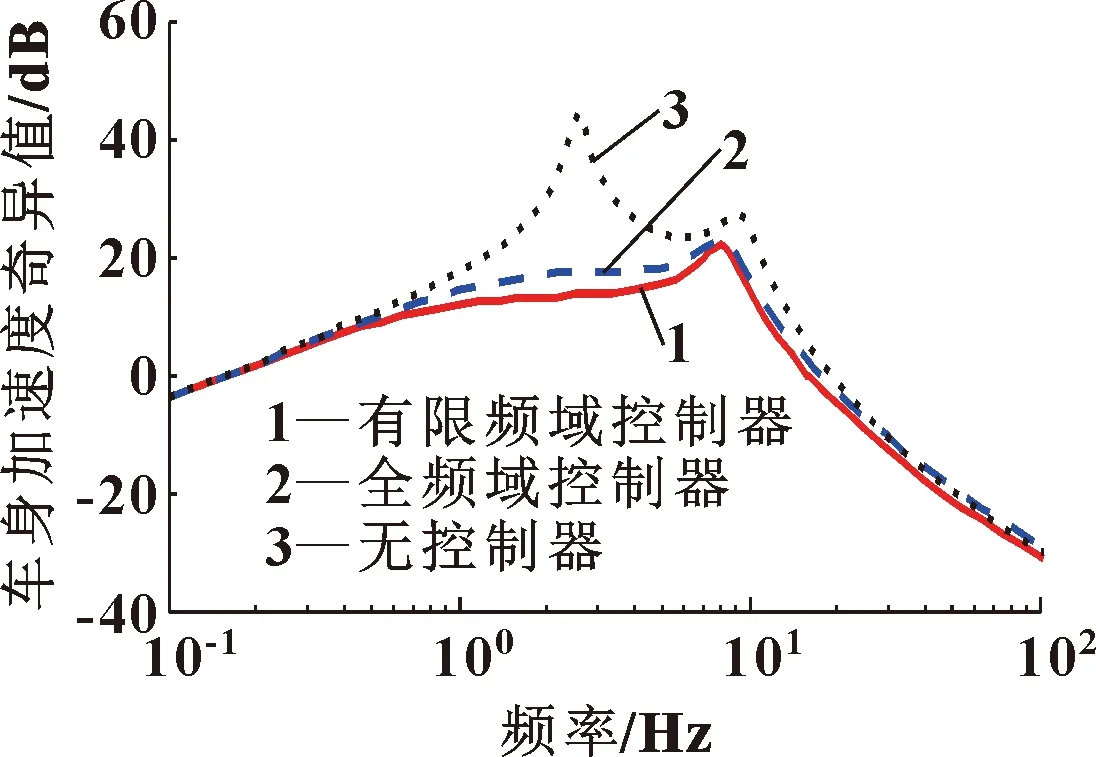
圖3 車身加速度頻域響應(yīng)
為了進(jìn)一步評(píng)估主動(dòng)懸架控制系統(tǒng)在時(shí)域內(nèi)的性能,采用如圖4所示的主動(dòng)懸架試驗(yàn)臺(tái)進(jìn)行實(shí)驗(yàn)分析與驗(yàn)證。考慮到在控制設(shè)計(jì)過程中面向的是一般路面激勵(lì),選取兩種典型路面形式開展實(shí)驗(yàn)和仿真研究。首先給出如下脈沖路面激勵(lì):
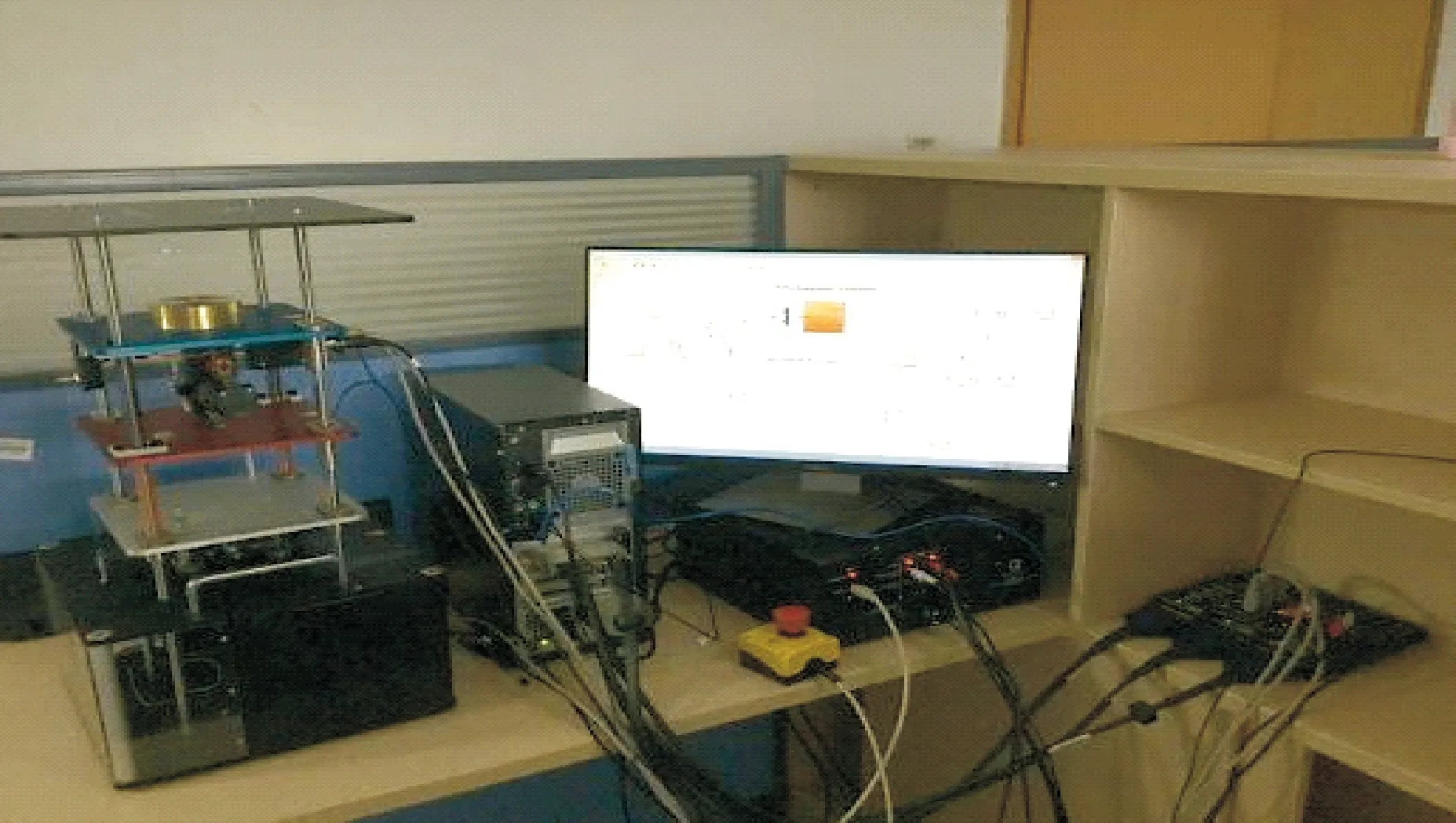
圖4 主動(dòng)懸架系統(tǒng)試驗(yàn)圖

=3 s
(32)
圖5為懸架系統(tǒng)在脈沖路面干擾下的響應(yīng)曲線。從圖5(a1)(b1)中可以看出有限頻域控制器比全頻域控制器產(chǎn)生更小的車身加速度值,這顯示著有限頻域控制器能更好地抑制振動(dòng),從而提高車輛的乘坐舒適性。從圖5(a2)(b2)(a3)(b3)中可以看出相對(duì)懸架動(dòng)行程和相對(duì)輪胎動(dòng)載荷均小于1,這說明了有限頻域控制器和全頻域控制器均可使懸架系統(tǒng)滿足機(jī)械硬約束,處于穩(wěn)定的工況。從圖5(a4)(b4)中可以看出兩種控制器的主動(dòng)力輸入均小于20 N,其中有限頻域的主動(dòng)力略大,這也是產(chǎn)生更好振動(dòng)抑制性能的支撐。綜上所述,脈沖路面激勵(lì)的實(shí)驗(yàn)和仿真結(jié)果驗(yàn)證了有限頻域控制器的有效性和優(yōu)越性。
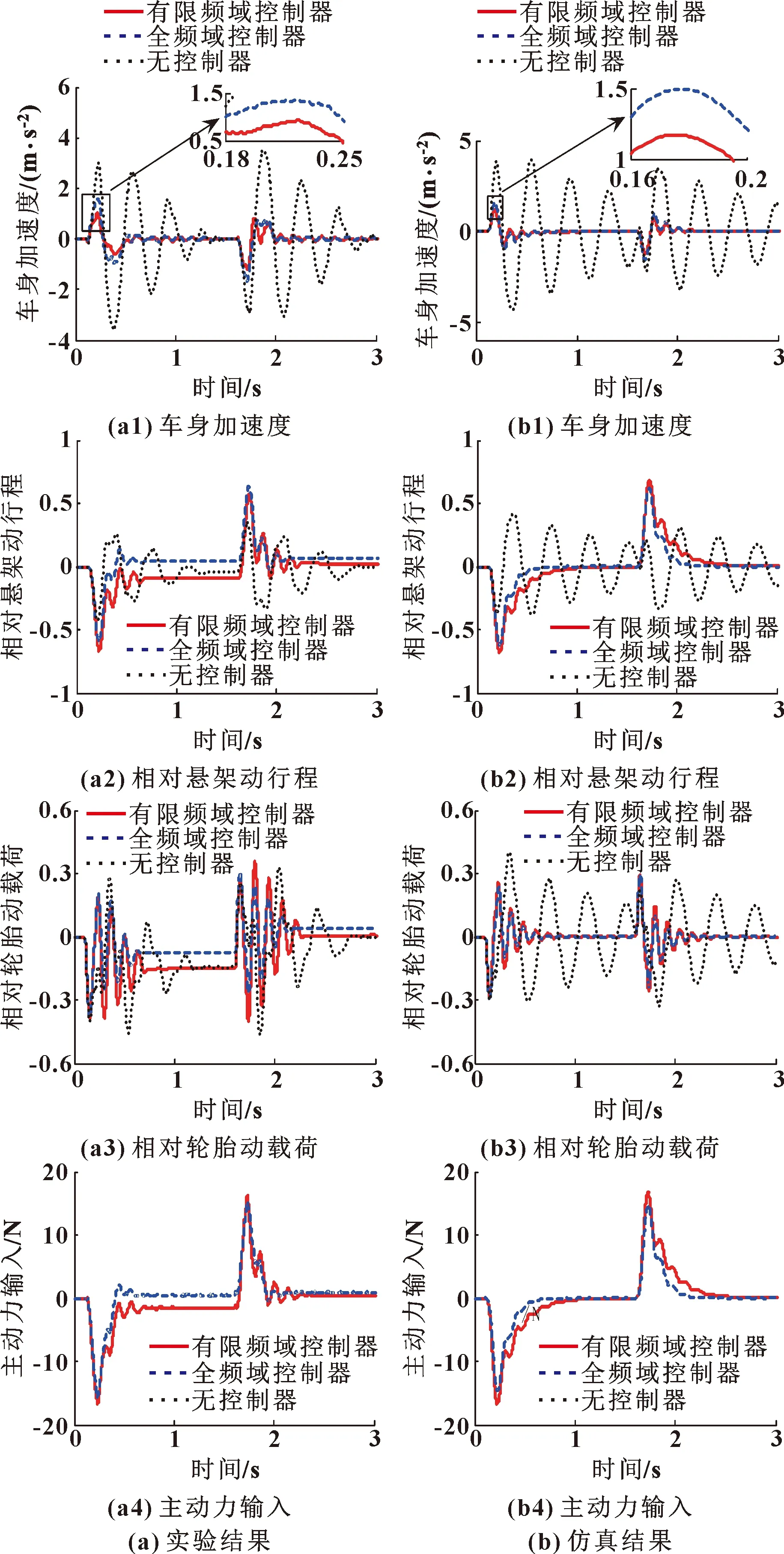
圖5 脈沖激勵(lì)下系統(tǒng)響應(yīng)
其次,給出頻率為4 Hz的正弦路面激勵(lì)進(jìn)行實(shí)驗(yàn)和仿真,如下:
()=001sin(2π)
(33)
其中:=4 Hz。
從圖6(a1) (b1)中可以看出所提出的有限頻域控制器相較于全頻域控制器能更好地抑制振動(dòng)。這說明了有限頻域輸出反饋控制方法在提升懸架系統(tǒng)乘坐舒適性具有良好的效果。從圖6(a2)(b2)(a3)(b3)可以看出懸架系統(tǒng)的機(jī)械約束包括相對(duì)懸架動(dòng)力行程和相對(duì)輪胎動(dòng)載荷均在規(guī)定范圍內(nèi),這說明了懸架系統(tǒng)處于一個(gè)穩(wěn)定的工況。從圖6(a4)(b4)可以看出執(zhí)行器主動(dòng)力幾乎限制在15 N之內(nèi),這顯示了執(zhí)行器的輸出是可行的。綜合所述,文中提出的有限頻域輸出反饋器在提升車輛乘坐舒適性方面具有較好的優(yōu)越性。
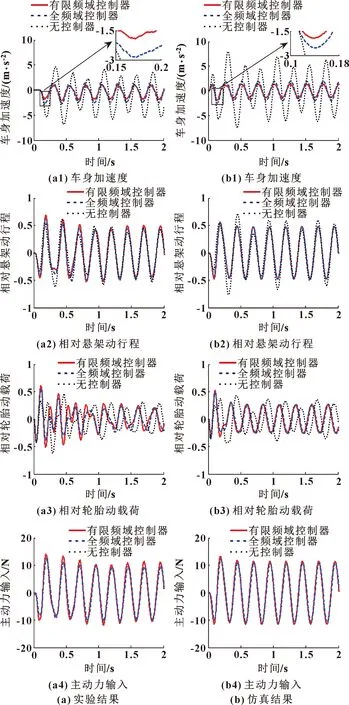
圖6 正弦激勵(lì)下系統(tǒng)響應(yīng)
總而言之,實(shí)驗(yàn)和仿真結(jié)果說明了所提有限頻域控制方法能更好地提升車輛乘坐舒適,同時(shí)保證了懸架系統(tǒng)的穩(wěn)定性。
4 結(jié)論
針對(duì)有限頻域干擾下的主動(dòng)懸架系統(tǒng),以提升懸架系統(tǒng)乘坐舒適性和滿足其機(jī)械硬約束為目標(biāo),提出一種基于啟發(fā)式兩步法的輸出反饋控制算法。首先,給出了一種有限頻域性能指標(biāo)判據(jù),通過引入合適的乘子矩陣推導(dǎo)出了懸架系統(tǒng)性能分析的充分條件。其次,通過應(yīng)用矩陣變換分離了充分條件中的矩陣耦合項(xiàng),進(jìn)一步得到了用于有限頻域控制器設(shè)計(jì)的可求解充分條件。基于啟發(fā)式算法,提出一種具有兩步的有限頻域輸出反饋控制的新方法。與全頻域控制方法相比,文中提出的基于啟發(fā)式兩步法的有限頻域輸出反饋控制方法體現(xiàn)了更好的擾動(dòng)抑制性能。最后,仿真分析和試驗(yàn)結(jié)果證明了文中提出的新方法比傳統(tǒng)的全頻域控制方法具有更好的控制效果,能更好地提升懸架系統(tǒng)的綜合性能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
兒童故事畫報(bào)(2019年5期)2019-05-26 14:26:14
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年7期)2015-08-11 15:03:12