閥控非對稱缸系統特性分析與位置控制研究
2022-09-15 06:22:36孫家慶張培珍曹秀芳翟麗娟韓寧
機床與液壓 2022年12期
關鍵詞:系統
孫家慶,張培珍,曹秀芳,翟麗娟,韓寧
(南京晨光集團有限責任公司,江蘇南京 210006)
0 前言
針對電液位置伺服系統,國內外學者展開了一系列研究。閥控缸系統(包括對稱閥、非對稱閥控制對稱缸,對稱閥、非對稱閥控制非對稱缸)在工程中廣泛應用,為提高閥控缸系統的控制精度,必須要得到閥控缸系統的準確數學模型。部分學者采用功率鍵合圖的方法進行建模,并分析了系統的非線性特性。呂云嵩和江桂云等從頻域特性的角度建立閥控缸系統的非線性數學模型。孟亞東和張尚盈等采用機制建模的方法,建立了閥控缸系統的傳遞函數,并采用仿真手段驗證了模型的有效性。楊慶俊等采用工作點線性化方法,建立了閥控缸系統數學模型。采用傳統的方式建立受控對象動力學模型時,常出現模型精度不高甚至難以建立系統模型的問題,這極大地限制了各種控制理論的應用和控制性能的提高。因此,也有學者采用系統辨識的方法對閥控缸系統進行模型辨識,得到準確的數學模型。
除了系統精準建模的問題,閥控缸系統仍然面臨非線性魯棒控制問題。目前,針對閥控缸系統的非線性控制,國內外學者做了大量工作。部分學者采用PID的控制方法解決閥控缸非線性系統的魯棒控制問題。YAO和柳波等人針對閥控缸系統模型不確定性和非線性問題,提出了自適應魯棒控制器。YU等針對閥控缸系統模型不確定性和非線性的問題,提出了基于Backstepping的魯棒狀態反饋控制器。目前很多學者也將神經網絡與控制理論相結合,解決閥控缸系統非線性補償的問題。
因此,本文作者基于閥控非對稱缸液壓系統原理,結合系統辨識的方法,建立閥控非對稱缸的非線性數學模型,結合時域、頻域分析方法,分析閥控非對稱缸系統的特性,提出基于位置前饋和雙PID控制方法補償非對稱缸位置控制問題。
1 閥控缸系統原理與數學模型
1.1 閥控缸系統原理
閥控缸系統的原理如圖1所示:液壓缸輸出的位移由位移傳感器測出并反饋到控制模塊,測控平臺輸出給定信號到控制模塊,給定信號與采集信號的差值通過控制模塊輸入到比例換向閥中,以進一步控制液壓缸的輸出位移。
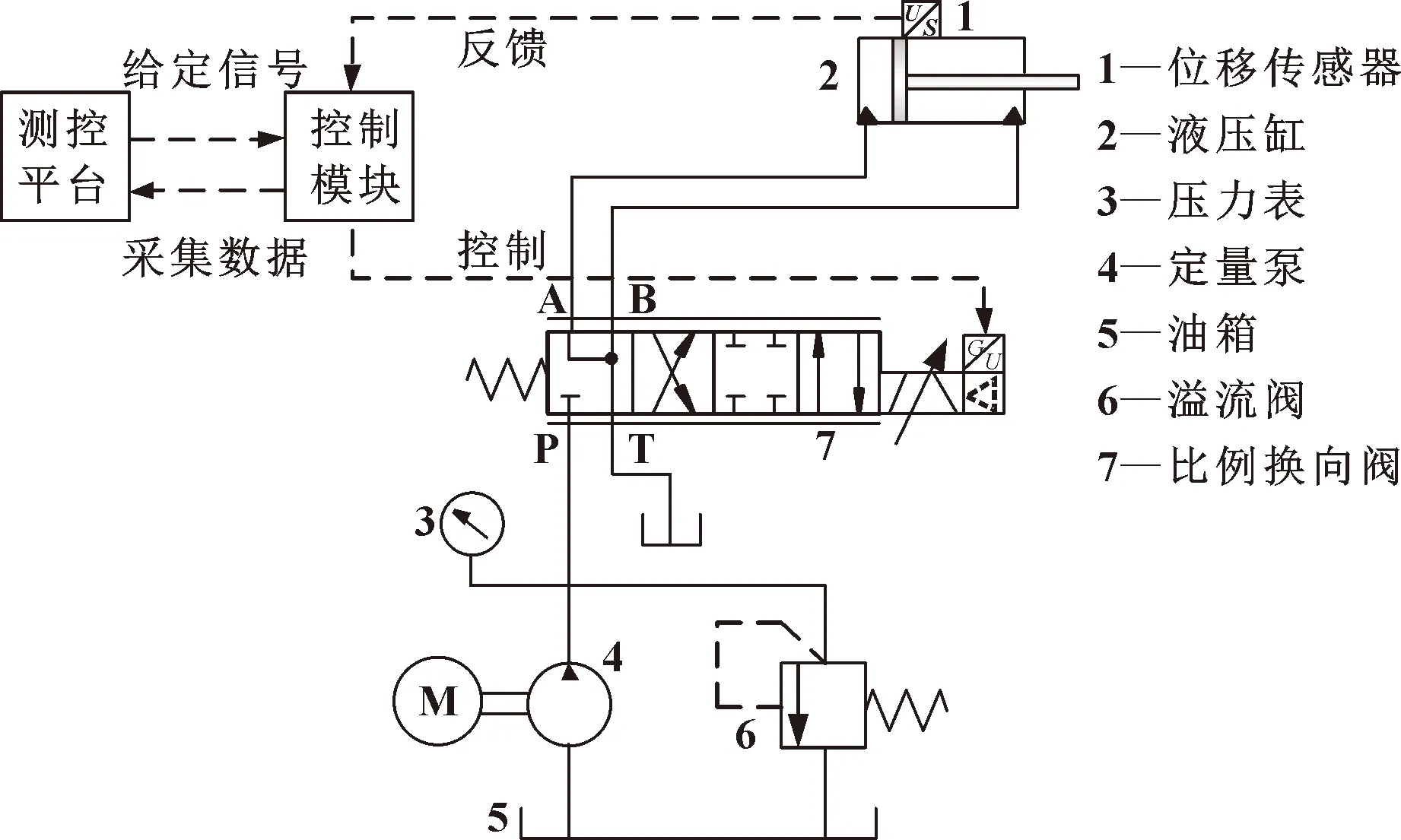
圖1 閥控缸系統原理
1.2 數學模型
比例換向閥的流量方程為
()=()-()
(1)
式中:()為比例換向閥流量,L/min;為比例換向閥流量增益;()為比例換向閥閥芯位移,m;為比例換向閥的流量-壓力系數;()為負載壓降,MPa。
液壓缸流量連續性方程為

(2)
式中:為液壓缸活塞有效面積,m;()為活塞位移,m;為液壓缸總泄漏系數;為液壓缸總壓縮容積,m;為有效體積彈性模量。
液壓缸和負載的力平衡方程為
()=()+()+()+()
(3)
式中:為活塞及負載折算到活塞上的總質量,kg;為活塞及負載的黏性阻尼系數,N·s/m;()為作用在活塞上的任意外負載,N。
由式(1)—式(3)可得閥控缸系統框圖,如圖2所示。

圖2 閥控缸系統框圖
由式(1)—式(3)或通過圖2所示的閥控缸系統框圖可得閥芯位移和外負載同時作用時液壓缸活塞的總輸出位移為

(4)
式中:為總流量-壓力系數,=+。

(5)
所以,對輸入的傳遞函數(閥控缸系統的開環傳遞函數)為
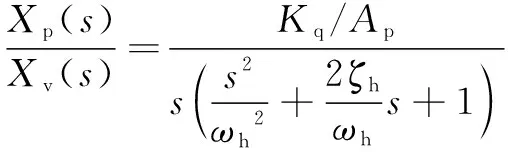
(6)
對干擾輸入的傳遞函數為
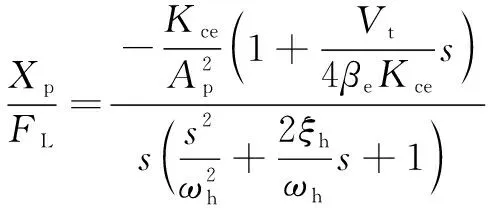
(7)
該閥控缸液壓系統輸入的是一個恒定壓力值, 其傳遞函數為
(8)
2 閥控缸系統閉環傳遞函數辨識
2.1 時域特性辨識
文中采用實驗法求取閥控缸系統數學模型,基于液壓實驗室的力士樂液壓教學平臺和測控平臺完成,實驗平臺實物如圖3所示。其中,液壓教學平臺主要用于搭建液壓系統和電控系統,測控平臺主要用于輸出給定信號和采集液壓缸的位移。

圖3 閥控缸系統實驗平臺
測控平臺硬件采用NI板卡,軟件采用LabVIEW,該軟件是一種程序開發環境,由美國某公司研制開發,是一個標準的數據采集和儀器控制軟件。程序面板及對應的前視面板如圖4所示。
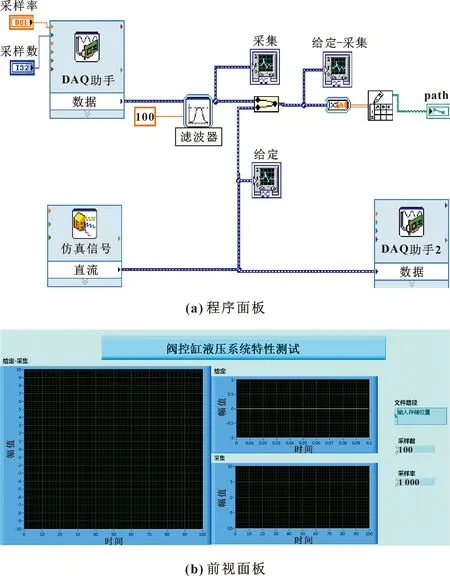
圖4 LabVIEW面板
依托上述實驗平臺,結合上述對閥控缸系統特性的分析,引入PID調節器,調整PID調節器中的比例系數,觀察液壓缸的輸出,對系統進行參數辨識。閥控缸系統位置控制框圖如圖5所示。

圖5 閥控缸系統位置控制框圖
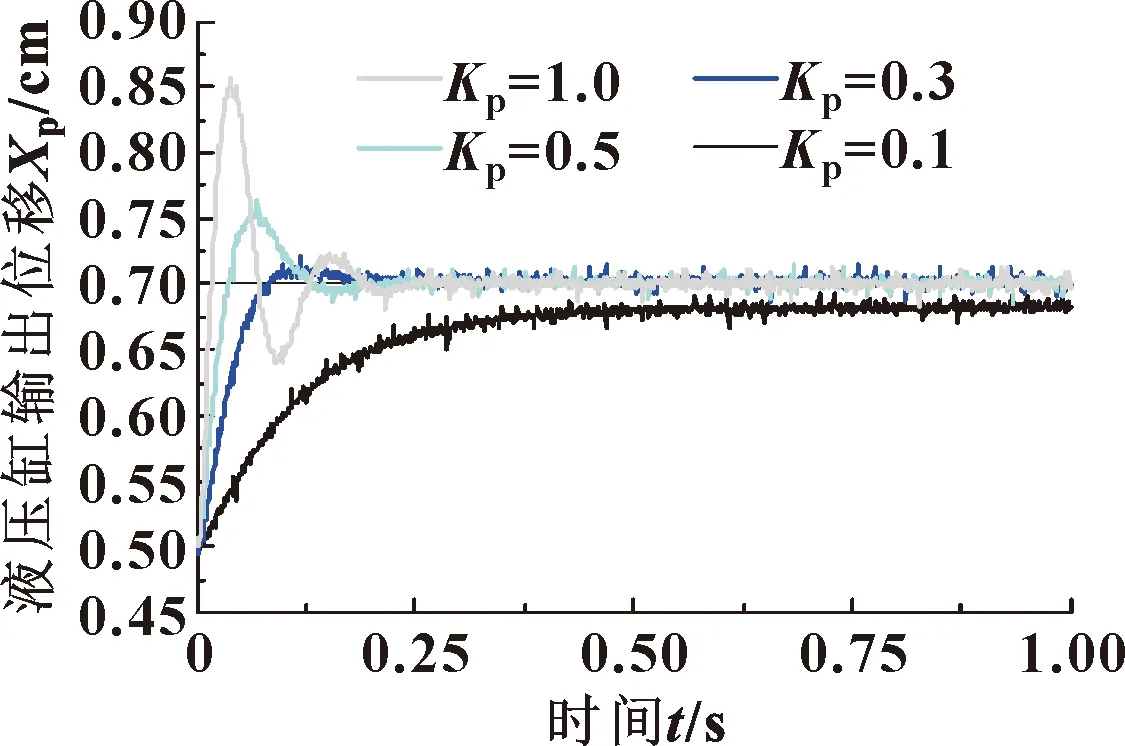
圖6 閥控缸系統階躍響應
采用MATLAB軟件,利用上述實驗數據、系統模型和如下程序指令,得到如圖7所示的辨識結果。
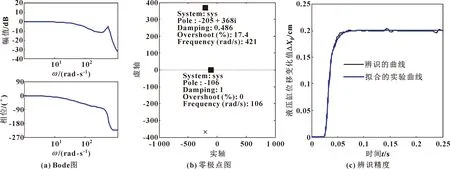
圖7 辨識結果
》y=bianshi.Y(1,7).Data;y1=y-0.5;x=bianshi.Y(1,1).Data;x1=x-0.5;
dry =iddata(y1(1000:7001)′,x1(1000:7001)′,0.001);
figure(1);plot(dry);
zf=idfilt(dry,[0,500],8,5);
figure(3);plot(zf);
[zr]=idresamp(zf,1,8,0.1);
蔣介石在1932年發表的一篇講話中強調:“總理更進一步用‘知難行易’的學說,要來啟發中國的民族精神,并用來實行他的革命主義。總理的意思,就是說:你們既知道三民主義和國民革命是好的,那你就只要照我的‘革命方略’去做,照我的三民主義去行,就一定能夠完成革命了。所以總理常講:‘你們一般黨員只要照我所講的話實在去行就好了,不要再去求另外的知。’他的意思即是:良知是我們大家所固有的,故不必另外再去求知,若說要求學問的知識完全,就要用許多時間更是不易,求‘知’既是不易,即是很難,后知后覺,以及不知不覺的人們,只是跟著先知先覺的人們去行,就可以節省時間,完成革命,因為跟著去‘行’是很容易的。”?
figure(4);plot(zr);
nns=[4 2 3];m=arx(zr,nns);
figure(5);bode(m);figure(6);plot(m);
compare(m,zr);
iscstbinstalled=license(′test′,′control_toolbox′)
&& (exist(′bode′,′file′)==2);
if iscstbinstalled
tfm = tf(m,′m′)%′m′ for ′measured′.
end
sys=d2c(tfm,′tustin′)
figure(7);bode(sys);
grid on;
figure(8);pzmap(sys);
考察閥控缸閉環系統固有特性,取控制器比例系數為1時,系統輸入為階躍信號,通過MATLAB程序結合實驗數據對閥控缸系統進行辨識,得到閥控缸系統的傳遞函數為

(9)
由圖7可知:辨識精度為97.66%,辨識得到閥控缸系統閉環傳遞函數的慣性環節轉折頻率為106 rad/s,該頻率對應開環增益,稱為速度放大系數,表征了閥對缸速度控制的靈敏度,該系數直接影響閥控缸系統的快速性、穩定性和準確性。Bode圖幅頻特性斜率-20 dB與-60 dB轉折點對應二階振蕩環節的轉折頻率,該頻率表征了閥控缸系統的二階振蕩環節的固有頻率為421 rad/s,該頻率處幅頻特性曲線的諧振峰值表征了閥控缸系統的阻尼比,閥控缸系統二階振蕩環節阻尼比為0.486。
2.2 頻域特性辨識
由式(6)可知,閥控缸伺服系統可以簡化成典型的比例環節、積分環節和二階振蕩環節的乘積。對閥控缸位置伺服控制系統進行頻率響應實驗,控制器=1、=0,給定頻率從10 rad/s變化到650 rad/s,分別計算每一個頻率點的幅值比和相位差,描出Bode圖如圖8所示。位置反饋通道設置轉折頻率為0.5 Hz的慣性環節,在高頻給定信號時采集數據反映的是系統開環特性。

圖8 頻域特性辨識Bode圖
穿越頻率=94 rad/s對應開環增益,稱為速度放大系數,表征了閥對液壓缸速度控制的靈敏度,該系數直接影響閥控缸系統的快速性、穩定性和準確性。
Bode圖幅頻特性斜率-20 dB與-60 dB轉折點對應二階振蕩環節的轉折頻率,該頻率表征了閥控缸系統的固有頻率為473 rad/s,該頻率處幅頻特性曲線的諧振峰值表征了閥控缸系統的阻尼比。
3 閥控缸系統特性分析
3.1 穩定性分析
由式(9)可知,系統的特征方程為
+5153+2206×10+1879×10=0
(10)
式(10)中各項均為正。列出勞斯列表為
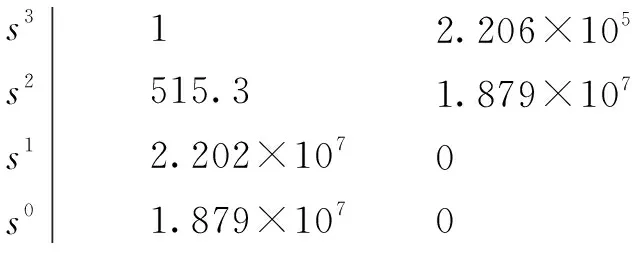
勞斯列表第一列各項符號皆相同且均為正號,系統穩定。
3.2 快速性分析
采用MATLAB軟件編程,繪制式(9)所示系統傳遞函數的Bode圖,如圖9所示。
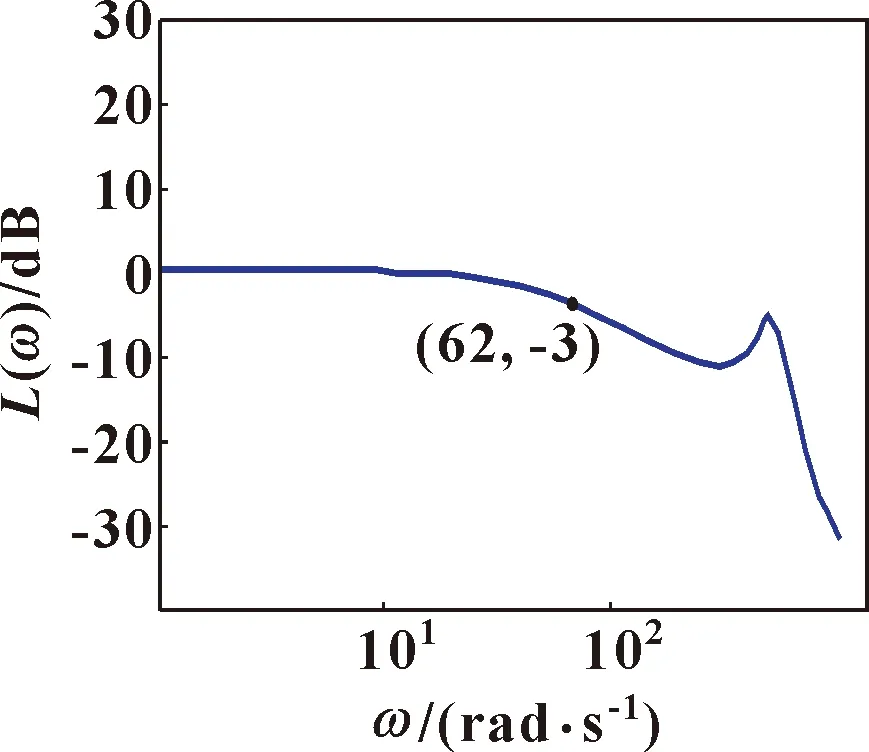
圖9 閥控缸系統閉環Bode圖
由圖9可知:系統的截止頻率=62 rad/s、帶寬0≤≤62 rad/s,帶寬偏小,帶寬表征了系統響應的快速性,所以系統的快速性需要進一步改善。
3.3 準確性分析
由式(6)可知,系統開環傳遞函數中積分環節的個數為1,所以系統為I型系統,該系統在階躍輸入的情況下沒有穩態誤差。
4 閥控非對稱缸位置控制研究
4.1 控制思想
本文作者采用位置前饋和雙PID的控制方法來補償非對稱缸位置控制,控制思想如圖10所示。
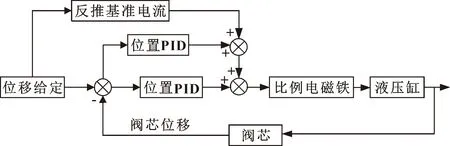
圖10 位置控制思想
文中所涉及的位置閉環控制主要包含兩個環節:位置閉環、基準電流前饋。指令位移與采集閥芯位移作差,該偏差經過PID后與基準電流疊加。根據閥芯受力平衡,得到指令位移下對應的電流,以前饋環節的形式加到位置閉環的輸出端,即位置閉環PID控制之后,該電流作為所需位移的基準電流。由于實際情況下存在摩擦力、液壓缸非對稱等因素,理論推導的關系并不能反映實際情況,位置PID中的積分環節用來補償這部分非線性因素的影響。
4.2 控制效果
為驗證所提出的控制策略的有效性,結合上述對閥控缸系統特性的分析,在保證系統具有足夠穩定裕量的前提下,盡量提高系統的動態響應速度。基于如圖3所示的實驗平臺進行研究,系統的響應如圖11所示。可知:在保證系統穩定裕量的前提下,隨著比例系數的增加,最大超調量增大,系統的快速性明顯提升,穩態誤差減小,即系統的控制精度明顯提升。系統超調量增加,導致系統的穩定性有所下降,但仍滿足系統穩定性的要求。
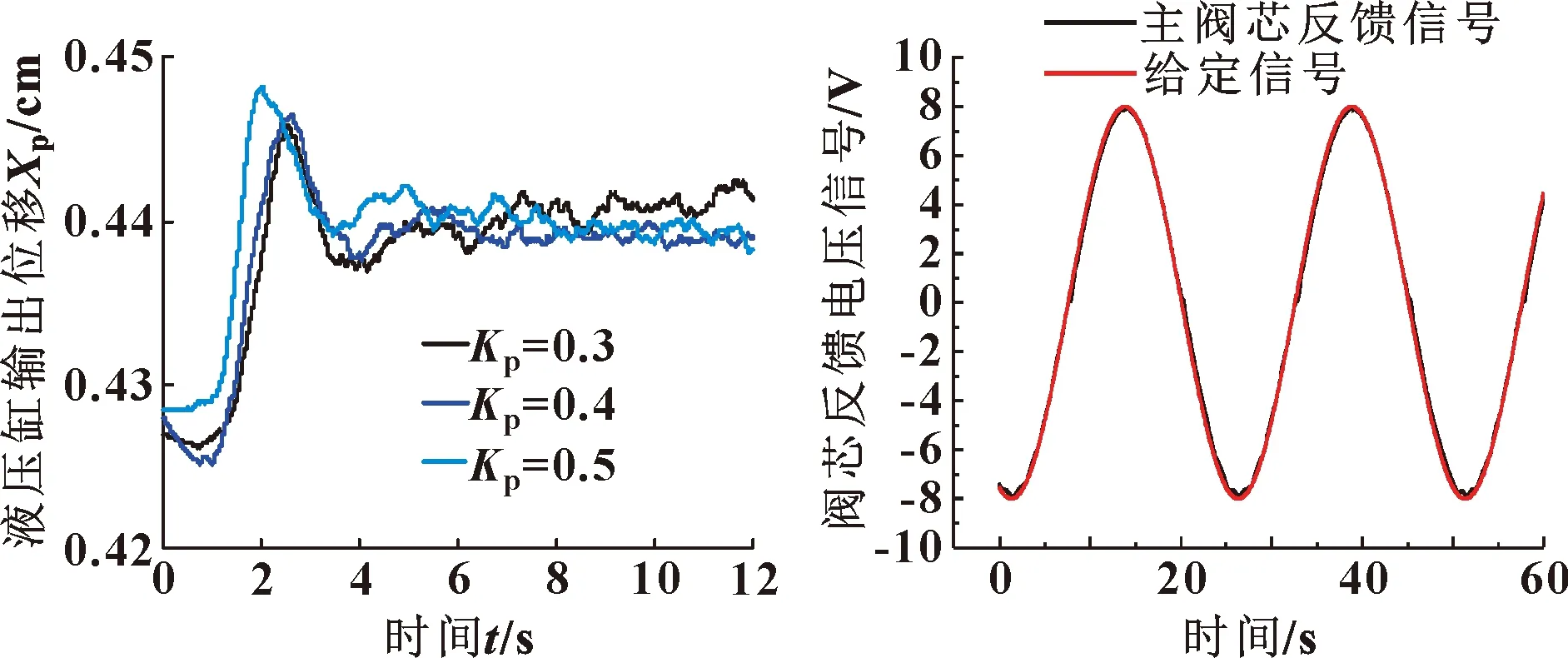
圖11 閥控缸系統PI控制系統響應 圖12 正弦響應
為驗證該控制系統在周期為25 s的正弦信號作用下的響應,采集液壓缸位移傳感器輸出的電壓,如圖12所示。
由圖12可以看出:系統準確快速地跟蹤了給定信號,且誤差在允許范圍內。
5 結論
通過上述研究結果,可以得出如下結論:
(1)通過時域和頻域的辨識方法,得到系統準確的傳遞函數,并分析了系統的穩定性、快速性和準確性。
(2)針對閥控非對缸位置控制系統,提出了一種指令基準前饋和雙位置PID的控制策略。在保證系統穩定裕量的前提下,該系統可實現較高精度的位置控制。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32