超磁致伸縮微位移放大機構的設計與性能研究
2022-09-15 06:22:50劉旭輝宋浩然吳雁胡慧娜徐彬蒲美玲
機床與液壓 2022年12期
關鍵詞:設計
劉旭輝,宋浩然,吳雁,胡慧娜,徐彬,蒲美玲
(1.上海應用技術大學機械工程學院,上海 201418;2.上海赫緣機電科技有限公司,上海 201104)
0 前言
隨著近年來高精度高端制造等領域的不斷發展,精密測量、高精度設備、航空航天制造等對微制動的要求越來越高,迫切需求能實現大行程與高精度的驅動裝置。利用超磁致伸縮材料(Giant Magnetostrictive Material ,GMM)研制的超磁致伸縮驅動器(GMA),通過外加電流可控制其輸出位移,響應快、精度高。但在一些特殊應用領域,需要對其輸出位移進一步放大才能滿足正常使用需求。
柔性鉸鏈式放大機構具有放大效率高、整體負載性好、運動穩定等優點,在微位移驅動裝置上被廣泛應用。華順明等對比了不同放大機構的優缺點,得出柔性鉸鏈式放大機構結構簡單、再現性好。虞啟凱等根據壓電驅動技術,設計出一種基于柔性鉸鏈的微旋轉平臺,通過理論與仿真驗證了該平臺設計誤差較小,具有較好的應用價值; QIU等研制出傾斜折疊的彎曲鉸鏈,通過折疊彎曲單元實現可變剛度的目的。
基于前期驅動器研制,設計一種微位移放大機構,用于放大超磁致伸縮驅動裝置的輸出位移。通過理論計算分析放大機構的位移放大效果和整體靜剛度;建立三維模型,并利用有限元仿真,驗證機構正確性;通過實驗測試系統,進一步對設計的放大機構進行實驗驗證。
1 杠桿式柔性微位移放大機構
1.1 柔性鉸鏈結構選擇
按照連接處切口形狀,柔性鉸鏈分為直圓形、橢圓形、復合多軸等。直圓切口形柔性鉸鏈加工簡易,在位移放大過程中位移損失量小,較為符合GMA驅動環境下位移的輸出。綜合考慮,文中選用直圓切口形柔性鉸鏈,其結構簡圖如圖1所示。

圖1 直圓型柔性鉸鏈
在理論計算時,不考慮鉸鏈最小厚度和切口半徑實際加工誤差。將柔性鉸鏈左端固定,在力以及力矩的作用下,鉸鏈右端將產生變形,設轉角變形量為,則柔性鉸鏈在平面內繞軸的轉角剛度為
(1)
其中:

(2)
=
(3)
式中:為彈性模量。計算得出的轉角剛度將用于計算所設計的放大機構整體靜剛度。
1.2 放大機構結構設計
位移放大機構采用對稱杠桿式結構,圖2所示為放大機構的1/2結構圖。理想情況下輸入位移經放大桿件2進行放大后,從輸出桿件3處輸出。在實際運動過程中,柔性鉸鏈在轉動時還會受到拉壓力作用產生一部分的位置偏移,從而影響放大機構的位移放大比。因此,在理論計算整體剛度時需考慮這一部分的變形。
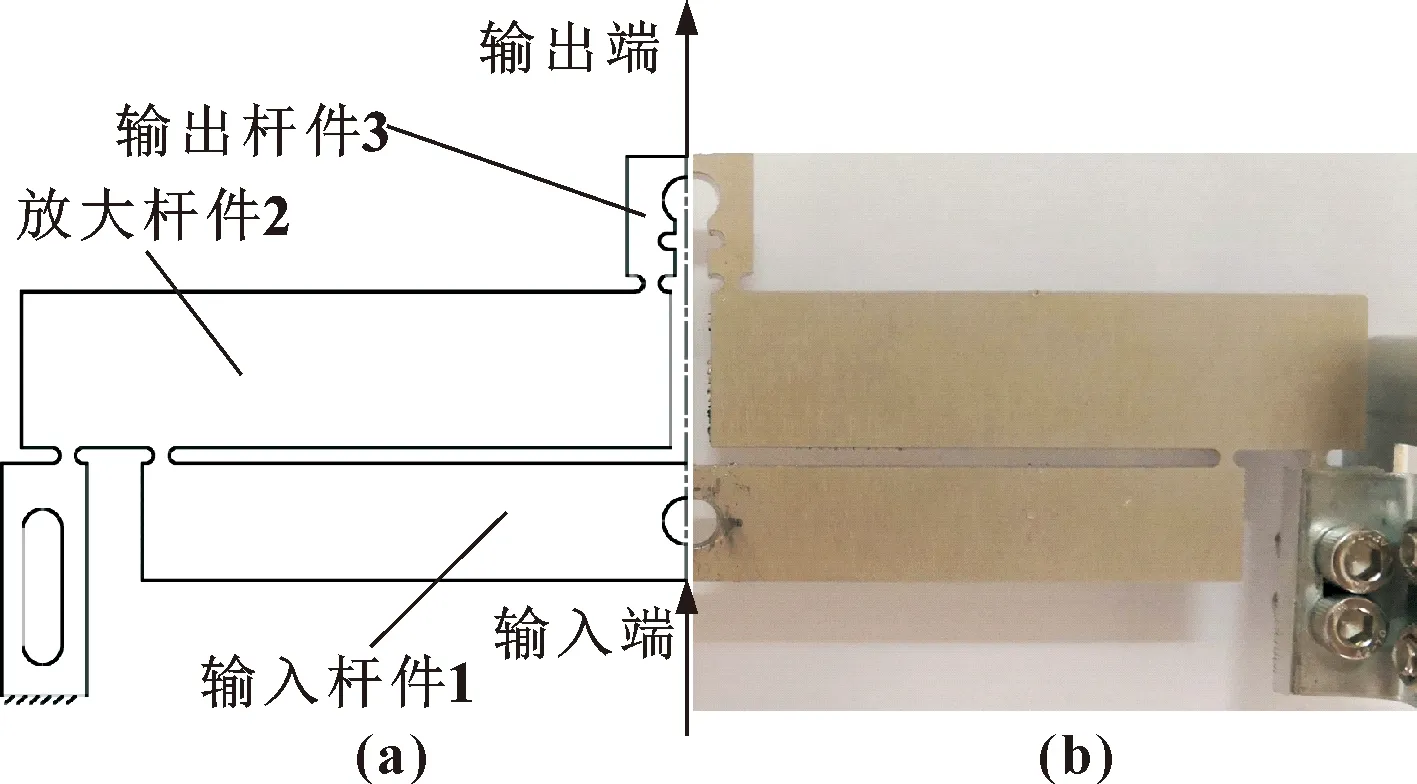
圖2 微位移放大機構1/2模型(a)及實物(b)
2 微位移放大機構特性分析
2.1 放大機構轉動特性分析
放大機構的幾何原理如圖3所示,包括輸入位移、輸出位移、輸入力臂、杠桿放大臂、輸出力臂等。、分別為、與水平線的夾角,為轉動后的與垂直方向上的夾角。對轉動的鉸鏈進行編號,根據杠桿原理,放大機構的理論放大倍數為=。
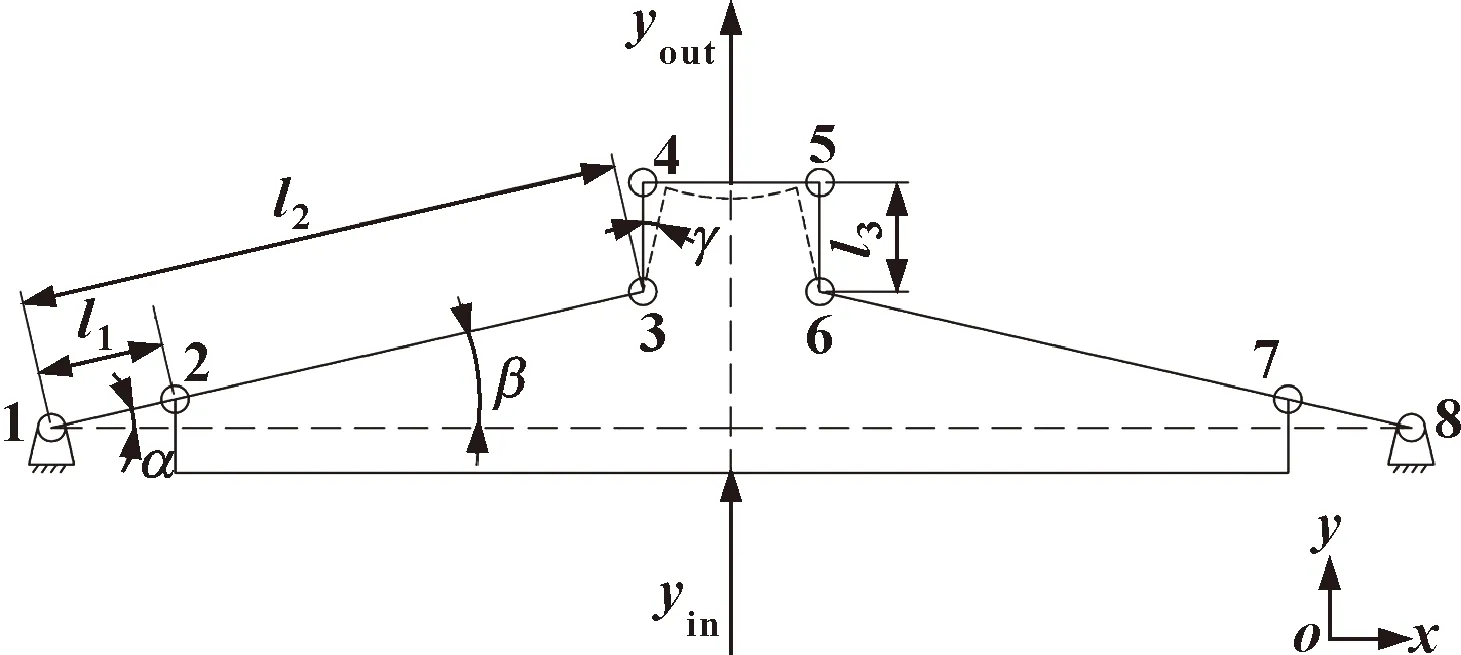
圖3 放大機構幾何原理
通過幾何原理,得出與比例因子以及之間的轉動關系,如圖4所示。其中,=/。
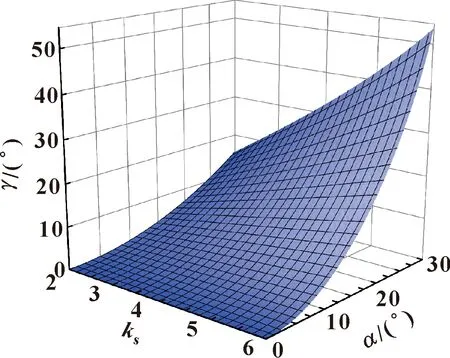
圖4 α/ks與輸出力臂轉角的關系
根據圖4及數據集,對在(3.0,5.0)內變化時,與變換的關系進行計算。發現位于(03°,10°)內時,兩者具有良好的線性關系,當<03°時,<5,因此可將近似取為0。由此可得關系式:

(4)
2.2 放大機構靜態整體剛度計算
在工作過程中放大機構會產生彈性形變,GMA輸入位移會有一部分被機構本身吸收,由于機構自身存在一定剛度,會造成一部分的結構反力,導致輸出力的損失。因此,需對靜剛度等進行計算,分析其輸出性能。
GMA在輸入端輸入驅動力,產生輸出位移Δ,各個鉸鏈發生角位移后,忽略拉伸變形量,設第處柔性鉸鏈的轉角剛度為、角位移為、柔性鉸鏈儲存的彈性勢能為,設驅動力所做功為,根據功能原理有:

(5)
在實際工作中角位移足夠小,則近似運算如式(6)所示,可得放大機構在方向上的靜剛度如式(7)所示:
≈tan=Δ
(6)

(7)
3 放大機構有限元仿真
利用Creo/E創建三維模型,導入ANSYS中進行有限元仿真。放大機構設計材料選擇Al7075,其彈性模量為71.9 GPa、泊松比為0.33、許用應力為270 MPa,設計參數如表1所示,切割的圓角半徑由于加工誤差設置為1.2 mm。
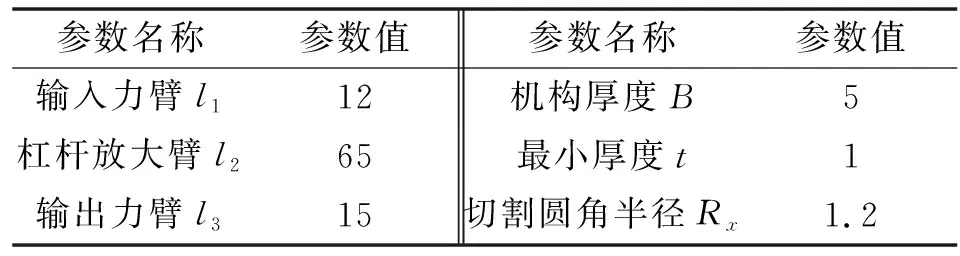
表1 放大機構設計參數 單位:mm
通過代入表1中數據計算可以得出,放大機構理論放大比=5.42,將數據代入公式(1)、(7)可得整體靜剛度=1.32 N/μm。
圖5所示為GMA輸入位移為60 μm時放大機構的仿真結果。可知:放大機構的輸出位移達到315.61 μm,放大比為5.26;在整個放大過程中,機構的最大應力為182.54 MPa<[]=270 MPa,故放大機構結構設計正確,其運動中最大應力出現在和連接的柔性鉸鏈處。

圖5 輸入位移yin=60 μm時的仿真結果
放大機構整體靜剛度、放大比的理論值與仿真結果對比如表2所示。可知:所設計的放大機構整體靜剛度誤差為6.45%、放大比誤差為3.04%,誤差合理,證明了所設計放大機構的模型正確性。

表2 放大機構整體靜剛度與放大比的理論值與仿真結果對比
4 微位移放大機構性能實驗
微位移放大機構整體安裝結構如圖6所示。其中,通過緊固螺釘將固定支架5固定。
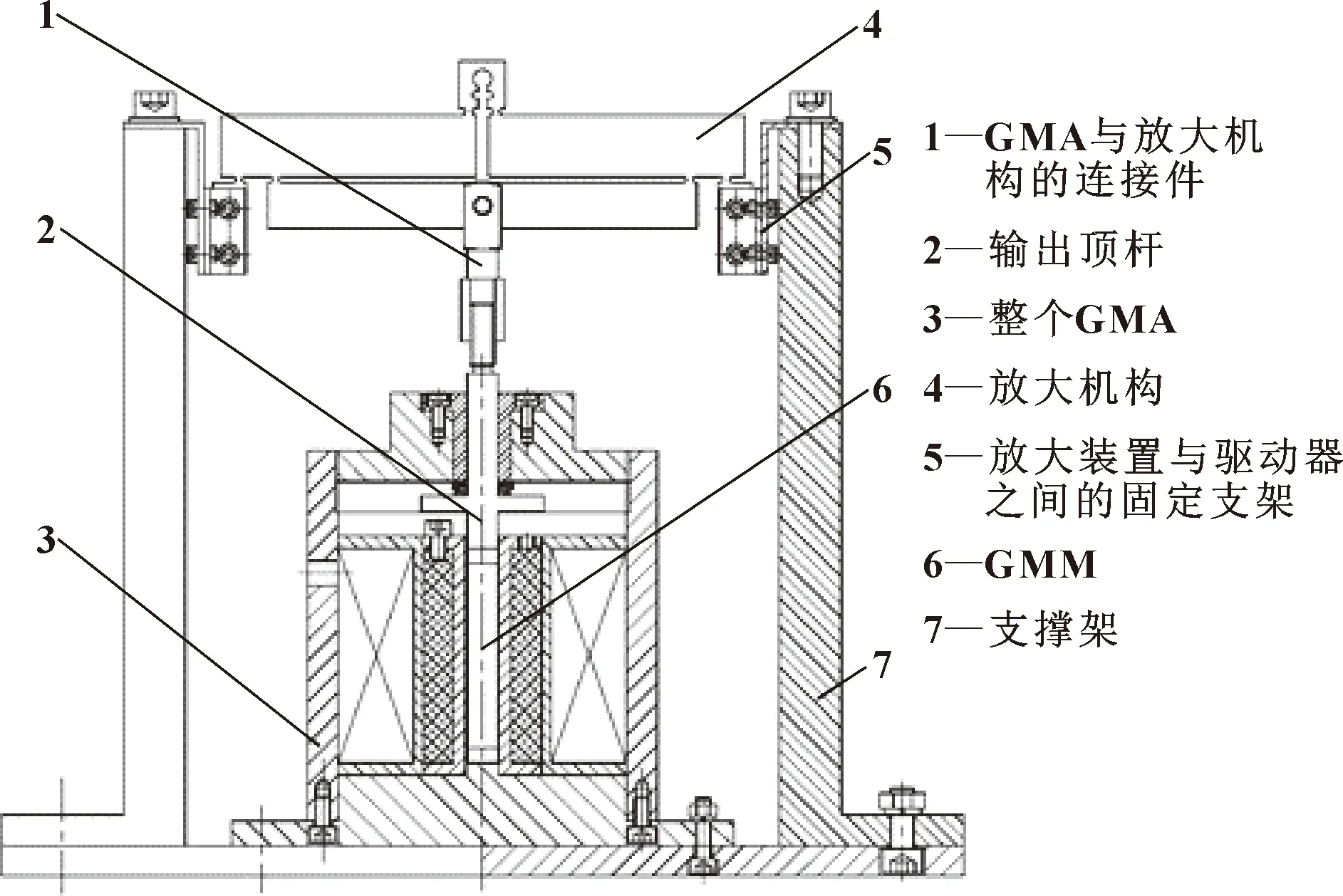
圖6 整體裝置安裝結構
柔性鉸鏈放大機構通過激光切割Al7075整體成型。安裝時,放大機構兩側通過固定片連接在兩側支柱上,利用支架將傳感器側頭豎直接觸放大機構輸出端,確保測頭與放大機構在一條基準線上,傳感器位移精度可達0.1 μm。實物安裝與測試平臺如圖7所示。
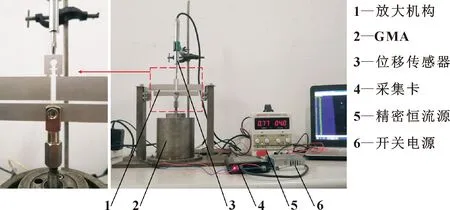
圖7 實物安裝與測試平臺
調節激勵電流改變放大機構的輸入位移,可得出在不同預壓力下的輸出位移,如圖8所示。可知:預壓力為100 N時,整個裝置輸出位移較為穩定。

圖8 電流-輸出位移
圖9所示為柔性鉸鏈放大裝置在GMA預壓力100 N下性能測試的結果。

圖9 預壓力100 N下輸出性能
由圖9(a)可知:機構的整體靜剛度為1.29 N/μm,與理論值誤差為2.32%。根據圖9(b)得出放大比為5.32,誤差為1.87%,均在5%以內。結果表明:所設計的放大機構整體靜剛度較好,位移損失較小。造成誤差的原因是計算時僅考慮柔性鉸鏈的切口變形,忽略了其余結構如力臂的變形,設備安裝也存在一定偏差。
5 結論
在特殊工作情況下為放大超磁致伸縮驅動器的輸出位移,設計了一種基于柔性鉸鏈的超磁致伸縮微位移放大機構,對其位移放大比、等效靜剛度進行了理論、仿真分析,并搭建了實驗測試平臺研究放大機構的輸出性能。結果表明:所設計的放大機構在100 N預壓力下輸出能力最好,位移損失量較少,輸出效率高,有效放大比達到5.32,誤差均在合理范圍內。研究結果為大行程超磁致伸縮驅動裝置的研制提供了參考。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04