乏燃料后處理廠1AW暫存罐遠距離取樣系統設計及應用
2022-09-16 04:16:12馬延彬肖寒月
中國核電 2022年2期
李 飛,馬延彬,周 鵬,肖寒月
(中核四川環保工程有限責任公司,四川 廣元 628000)
乏燃料后處理廠1AW暫存罐內存有一定量的放射性有機廢液,由于長時間暫存有機廢液在強輻射場作用下生成一系列的降解產物,并與Zr、Nb、Ru等一系列裂變產物絡合,導致罐內物項分布出現明顯的分層現象(界面污物、中部液相、底部沉積物)。
1AW暫存罐建立時未對取樣作專項設計,僅有設備室上部儀表孔連通罐體。前期,迫于設施條件限制,針對該貯罐的取樣均采用通過儀表孔進行吊取方式來完成,存在取樣代表性不足、難以取得固體樣品、無法遠距離操作等弊端和不足。為實現1AW暫存罐內代表性樣品的獲取,克服人工取樣的缺點,根據現場情況結合人員輻射防護需求,設計了一套由三軸運動執行機構、液壓機械臂、取樣器等幾部分組成的遠距離取樣系統,并最終投入現場應用,成功完成多點位,不同深度的界面污物及底部沉積物取樣工作,獲取了足夠數量的樣品。相比于傳統的人工吊樣,具有取樣覆蓋范圍更廣,樣品代表性更強,取樣人員受照劑量更小的優點。
1 取樣裝置設計需求分析
1.1 設施背景
1AW暫存罐直徑5 m,高4.5 m,圓柱形結構,不銹鋼材質,內部暫存部分放射性有機廢液。貯罐置于圓形鋼筋混凝土設備室內,設備室周邊及底部混凝土厚度為0.5 m,頂部厚度為1.4 m,罐頂操作間尺寸為3.7 m×3 m×3.7 m。
1.2 設計要點分析
針對1AW暫存罐內部物項混雜,放射性水平高,人員難以接近的特點,對取樣裝置的設計需重點關注兩個方面,一是代表性樣品獲取,二是作業人員的輻射防護。
1.2.1 代表性樣品獲取
1AW暫存罐內物項混雜、源項不清,為實現后續的廢物處理/處置以及設施退役,必須對罐內廢物開展取樣分析工作。前期,雖已開展過取樣工作,受到取樣通道、取樣設備的限制,所取得的樣品僅限于儀表孔正下方罐內物相,無法實現對貯罐內物項的多點位、不同深度的取樣,所取得的樣品缺乏代表性。
以代表性樣品為獲取目的,對存在的問題進行分析,并制定對策:
存在問題:1AW暫存罐僅有上部儀表孔可進入罐內,利用其作為取樣通道對取樣裝置的可通過性、結構尺寸、取樣可達性有較大的限制;1AW暫存罐采用地下貯罐結構,取樣裝置以混凝土屏蔽層上方為起點需達到縱向7 m,橫向覆蓋2.5 m;罐內放射性固體樣品為乳化的有機污物,存在放射性水平較高,有一定粘度的特點,在罐內以漂浮和沉淀的形式存在。
對策措施:利用專用設備對罐頂屏蔽混凝土以及貯罐進行開孔,開辟新的取樣通道;設計具有高穩定性、大覆蓋面積、自動化程度高、耐輻照的遠程取樣系統,取樣覆蓋范圍需滿足縱向不小于7 m,橫向不小于2.5 m;針對罐內物項特性設計專用取樣器。最終利用研制的液壓機械臂載帶專用取樣器,通過新開辟的取樣通道,進入罐內開展多點位、不同深度的取樣工作。
1.2.2 作業人員輻射防護
暫存罐內部物項包含的放射性核素種類眾多,放射性水平較高。作業人員的輻射防護主要包括放射性氣溶膠輻射防護以及外照射輻射防護兩個方面。其中,放射性氣溶膠輻射防護主要是通過合理的組織氣流來實現控制,采用在貯罐上方搭建氣帳以及新建貯罐尾氣抽排系統的方式實現;外照射輻射防護主要是利用遠距離遙控操作,使取樣人員遠離罐內放射源,穿著鉛衣等輻射防護用品,同時設置屏蔽鉛板對關鍵放射區域進行合理屏蔽。
2 裝置設計
1AW暫存罐遠距離取樣系統設計,主要分為現場輻射防護設計與取樣系統本體設計兩部分。現場輻射防護設計主要是對原有操作間進行改造,搭建氣帳,配置輻射監測系統,用以輔助取樣工作的開展,確保取樣作業人員劑量受控;取樣系統本體設計主要分為控制系統、三軸運動機構、液壓機械臂機械臂系統、專用取樣器的設計,最終集成整體裝置用以實現對罐內物項的遠距離取樣。
2.1 輻射防護設計
原有進入1AW暫存罐的通道(φ70×4的儀表孔)不能滿足取樣系統進入罐內取樣的需求,需對罐頂上方混凝土以及貯罐進行開孔,為后期取樣系統進入罐內進行取樣提供通道。由于屏蔽層被破壞以及取樣對象的高放射性,需對輻射防護做重點考慮。
2.1.1 放射性氣溶膠防護設計
罐內物項取樣、樣品接收轉送作業時的放射性氣溶膠防護主要是通過作業現場氣流組織來防護。氣流組織依靠在貯罐頂部搭建氣帳、增設呼排系統實現,氣流組織為:氣帳→設備室→貯罐內→尾氣系統。氣帳搭建于貯罐上部地面,配套進排風系統。氣帳搭建示意圖如圖1所示。
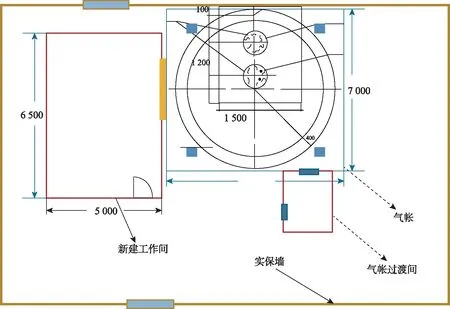
圖1 氣帳搭建示意圖Fig.1 Schematic diagram of air tent construction
利用貯罐備用儀表套管作為呼排系統通道,建立呼排系統,罐內尾氣經高效過濾器過濾后,由廠房排風系統排出。
建立的呼吸系統換氣次數計算(按照貯罐開孔后與氣帳連通的情況進行計算)。

(1)
其中:n為換氣次數,單位為次/h;
v排為呼排系統排氣量,單位為m3/h;
v貯罐為貯罐體積,單位為m3;
v液為放射性廢液體積,單位為m3;
v氣帳為新建氣帳體積,單位為m3。
呼吸系統換氣次數大于4次滿足換氣要求。同時為實時監測氣帳內γ劑量率水平以及放射性氣溶膠濃度,在氣帳內安裝4個區域γ監測探頭,同時設置一臺放射性氣溶膠連續監測儀,在放射性氣溶膠到達閾值后報警。
2.1.2 人員外照防護設計
由于罐內物項的γ核素放射性水平較高,設備安裝、系統調試、冷試驗、現場取樣工作過程中,γ外照射防護是必須考慮一個輻射防護要點。在對貯罐頂部混凝土以及貯罐本體進行開孔前,貯罐頂部有1.4 m厚度的混凝土屏蔽層將1AW暫存罐與上部操作間隔離開,如圖2所示。
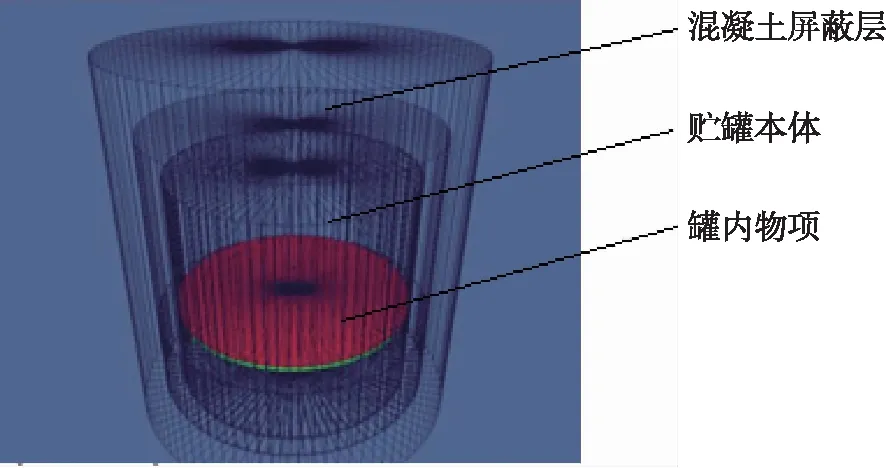
圖2 1AW暫存罐三維示意圖Fig.2 3D schematic diagram of 1AW temporary
輻射監測人員利用輻射測量儀器對設備室內外多個點位進行了劑量率測量工作,結果顯示在混凝土屏蔽層完好的情況下,罐頂的γ劑量率處于本底水平。在對罐頂混凝土及貯罐實施開孔作業后,內部放射性物項通過開孔發射γ射線,并延開孔內壁向上投射。利用蒙特卡羅軟件進行模擬計算,上部開孔完全打通后,距離水泥屏蔽層1 m處,γ射線投射直徑約為1.5 m,距離水泥屏蔽層2 m處,γ射線投射直徑約為1.74 m,模擬γ射線投射分布及強度情況見圖3。
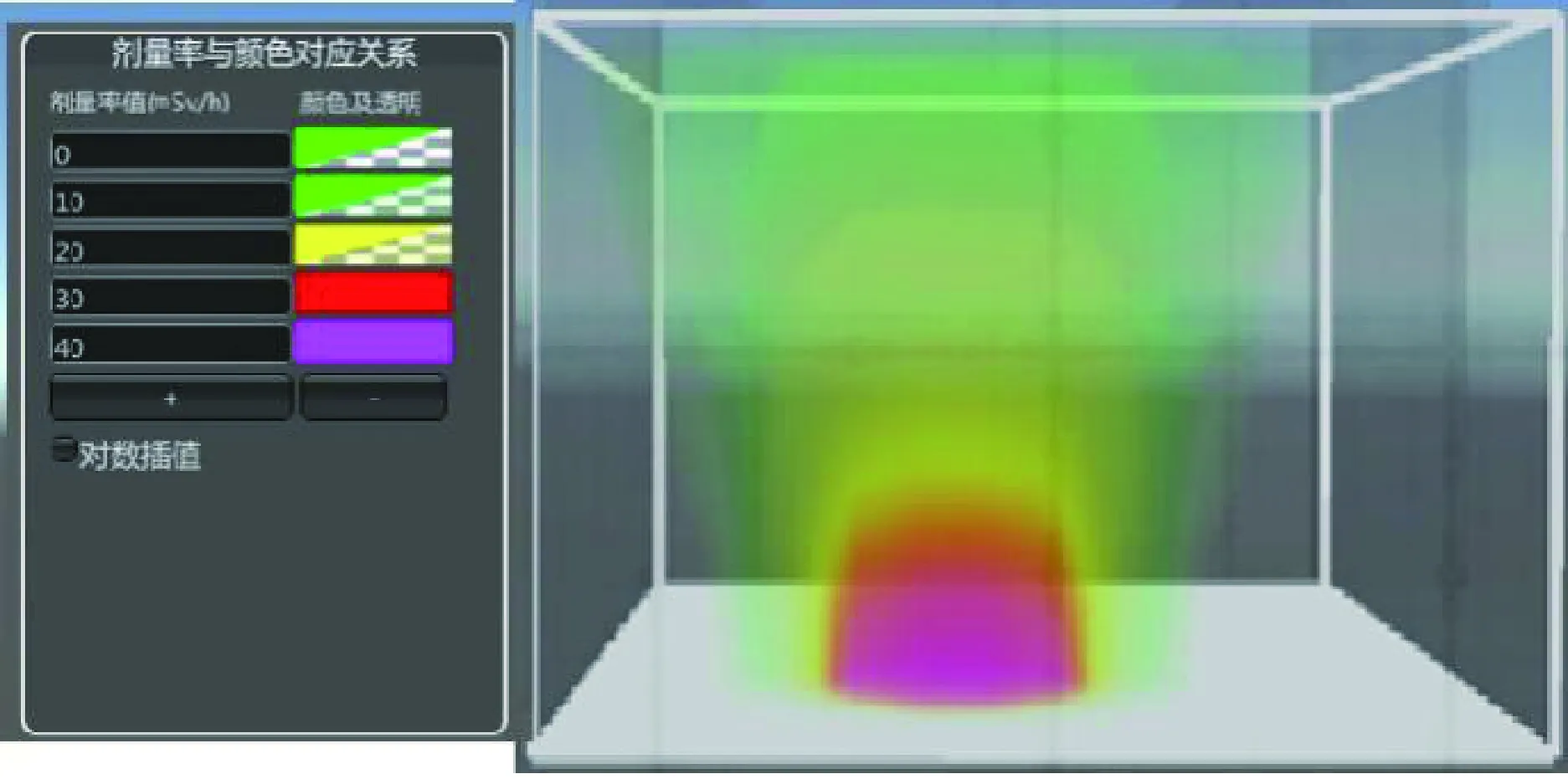
圖3 γ射線投射分布及強度模擬圖Fig.3 γ ray projection distribution and intensity simulation diagram
對于人員的外照射輻射防護主要考慮距離、時間、屏蔽三個方面,人員遠離γ射線投射區域;盡可能的減少人員取樣作業時間;穿戴鉛衣等輻射用品。
對近距離人工取樣及遠距離機械取樣兩種方式下,人員受照情況進行模擬計算。人工近距離取樣需工作15~30 min,工作時間期望值為22.5 min。假定取樣作業人員站立位置為人孔邊緣處,對模擬結果分析可得人孔邊緣處劑量率最小值為13.53 mSv/h,最大值為14.54 mSv/h,劑量率期望值為14.16 mSv/h。考慮鉛衣屏蔽效果,單個工作人員的個人劑量當量Hp(10)的上限為6.78 mSv,下限為3.15 mSv,個人劑量當量Hp(10)的期望值為4.95 mSv。采用遠程遙控作業階段,人員遠離開孔取樣位置,現場實測操作位置劑量率水平為36 μSv/h,作業2 h情況下單個工作人員的個人劑量當量Hp(10)為72 μSv,采用遠距離取樣可實現人員受照劑量的有效控制。
2.2 取樣系統設計
利用液壓機械臂為核心裝備,以實現遠距離取樣為目的,形成取樣系統整體設計,整個取樣系統由三軸運動機構、液壓機械臂、取樣器及控制監控系統組成。
2.2.1 三軸運動機構
由于取樣裝置要求能夠在縱向移動至地下0~7 m(以屏蔽混凝土頂面為0點),對貯罐不同深度多個點位的物項進行取樣,裝置需具備極好的空間運動能力以及穩定性。三軸運動機構是用于實現取樣裝置空間運動的機構,由XY向運動機構、Z向運動機構(伸縮套筒)構成。伸縮套筒作為實現Z軸運動的主要設備,下部載帶了機械臂以及取樣頭,在取樣過程中隨著機械臂位姿變化,其受力狀態也將發生較大變化。為保證取樣過程中的穩定性,在設計時利用模擬軟件對取樣過程中的套筒進行力學校核,套筒應力應變分析如圖4所示。
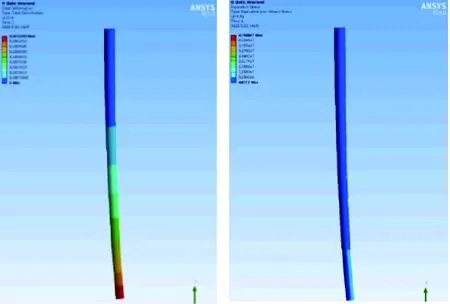
圖4 套筒應力應變分析Fig.4 Stress-train anaiysis of sleeve
2.2.2 液壓機械臂
為實現取樣的高準確性,液壓機械臂設計為一個多自由度串聯型關節液壓機械臂,末端為液壓夾鉗(用以攜帶取樣器),取樣時可通過多自由度的運動實現對取樣位置的準確到達。液壓機械臂通過法蘭安裝在末級伸縮套筒上,利用伺服控制系統進行控制,并將電氣控制元件進行后置以減輕輻射對控制系統的影響,液壓機械臂系統設計圖如圖5所示。
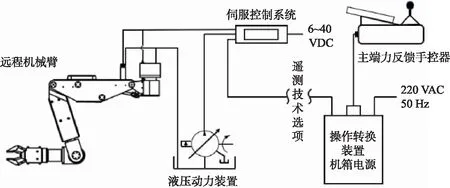
圖5 液壓機械臂系統設計圖Fig.5 Hydraulic mechanical arm system design drawing
2.2.3 取樣器
1AW暫存罐已使用多年,內部有機液體在強輻射和化學的長期作用下逐漸降解乳化,形成的固項流動性較差、具有一定黏度,取樣器主要針對罐內固項特性及取樣需求設計。
取樣器以小型氣缸為動力實現兩個半球性取樣碗的開閉從而進行樣品取樣,整體組件包括:取樣碗、剪刀桿、氣缸、連接軸、剛性連接桿、復位輔助彈簧等組件,樣品取樣器設計示意圖見圖6。

圖6 取樣器設計示意圖Fig.6 Sample sampler design diagram①—連接管;②取樣碗;③連接桿;④銷;⑤剪刀桿;⑥剪刀桿-02;⑦螺帽M4;⑧彈簧-01;⑨氣缸接頭;⑩氣缸
2.2.4 控制及監控系統
考慮到人員以及電子元器件元件的輻射防護,控制系統位于遠端,安裝在設備室外的控制臺上,控制系統是對整個設備室內三軸運動機構、液壓機械臂、取樣器、監控照明系統的操作和控制。設備的運行和操作通過控制臺上面的人機界面或按鈕進行操作,設備的運行狀態可在控制臺的組態界面上模擬精確觀察,或是通過視頻監視器實時進行觀察,同時為了更加安全和可靠,在控制臺前設備室墻面上安裝有窺視窗。
視頻監控系統光學結構圖主要包括監控前端、主控設備、傳輸和后臺顯示構成,現場布置3臺視頻監控器,其中2臺為球型高清攝像機安裝在套筒中部,1臺為耐輻照攝像機安裝在液壓機械臂腕部,最大累積受照劑量1×105Gy。
3 取樣裝置現場應用
1AW暫存罐遠距離取樣系統針對的取樣對象具有較高的放射性水平,取樣作業在高劑量場下實施,因此在開展正式取樣之前需開展現場設備安裝調試、冷試驗,最終投入正式應用。
3.1 設備安裝及冷驗證
設備進場安裝采用吊車吊裝的方式,裝置主體按照從上至下安裝的模式進行,安裝完成后逐項開展冷調試驗證。取樣系統整體布局圖見圖7。
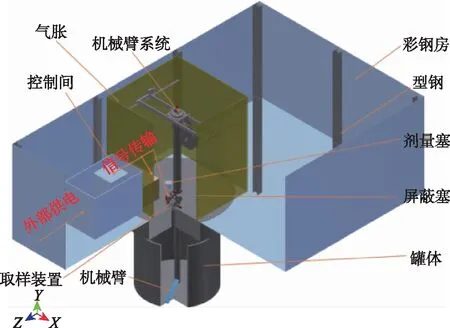
圖7 取樣系統整體布局圖Fig.7 Overall layout of sampling system
取樣系統完成安裝后,利用制備的罐內模擬物項開展了專項冷試驗,對各項性能進行了驗證,驗證結果見表1。
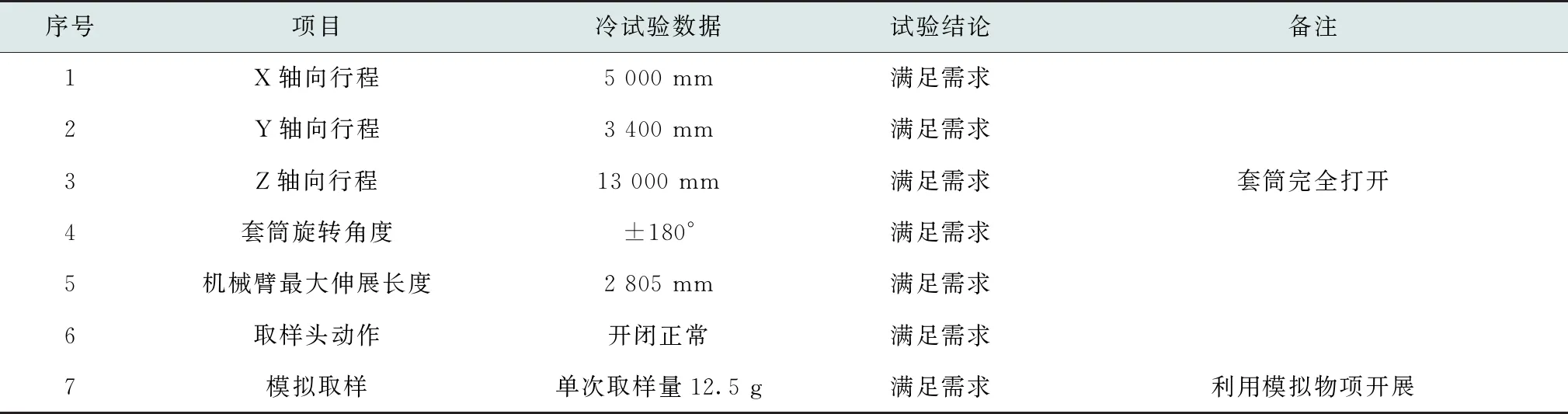
表1 冷試驗驗證結果
結果證明取樣系統各項功能均滿足取樣需求(縱向7 m,橫向半徑2.5 m,單次取樣量≥10 g),具備投入現場使用的條件。
3.2 現場取樣
1AW暫存罐內部物項呈現明顯的三層分項,為獲取有代表性的樣品需針對各項物項制定詳細的取樣方案,液體取樣采用的是真空泵抽吸的方式單獨進行。本取樣裝置的取樣對象主要是針對上層界面污物以及底部沉積物。
3.2.1 取樣方案設計
上層界面污物取樣設計,通過內窺鏡觀察罐內上層界面污物及罐底沉積物情況,發現其分布并不均勻,取樣方案設計采用分扇區隨機取樣。將大罐平均分為8個扇區,并以貯罐中心為原點布置10個同心圓,同心圓起始直徑為500 mm,按照500 mm的幅度增加至5 000 mm,取樣時在圓環與扇區交叉點位上進行隨機取樣。
3.2.2 罐頂混凝土及貯罐開孔、封堵
采用對設備室及貯罐進行開孔的方式開辟取樣裝置進入罐內通道。開孔作業均采用有線遙控設備進行,首先使用鉆石鉆孔機在混凝土屏蔽層上開4個直徑為200 mm的孔,然后利用開孔安裝金剛石線鋸導軌及金剛石鏈鋸,使用金剛石鏈鋸切割混凝土完成開孔。對于貯罐采用特制的工裝搭載等離子切割設備進行開孔。開孔作業完成后,對混凝土蓋板及貯罐進行封堵,封堵裝置根據開孔情況非標定制。
3.2.3 現場取樣實施
取樣工作開始之前,先將取樣頭、樣品收集容器、屏蔽轉移容器等轉運至新建操作間內,放置在氣帳內。
1) 待設備準備到位后,作業人員開啟尾氣抽排系統,控制氣流走向實現氣帳→設備間→貯罐→尾氣系統;
2)利用機械手然后打開混凝土以及貯罐蓋板;
3)通過負壓表檢測,待氣流組織穩定后開展現場取樣操作,控制動力機械臂夾持取樣器進入罐內,通過伸縮套筒和動力機械手臂將取樣器送達設計取樣位置;
4)確認到達指定位置后,操作取樣裝置進行取樣;
5)單次取樣完成后控制取樣裝置沿垂直方向縮回一定距離(脫離界面污物上表面),靜置一段時間,讓樣品內的液相靠重力流回罐內,減少液相殘留;
6)操作動力機械臂,沿徑向收回至合適的位置,操作取樣裝置將樣品投入提前放入樣品收集容器內;
7)更換界面污物取樣頭,重復以上步驟,按照取樣布點,完成后續樣品的取樣工作;
8)取樣結束后在液壓機械臂的輔助下,將樣品收集容器轉入屏蔽轉移容器內;
9)在機械手的輔助下利用封堵裝置封堵混凝土及貯罐開孔,關閉臨時呼排系統;
10)將取樣裝置復位至初始位置,關閉系統,斷開電源,對裝置本體進行去污及測量,將取樣過程中產生的放射性廢物分類收集,暫存。
3.3 應用小結
利用遠距離取樣系統開展取樣作業相比于傳統的人工吊樣本取樣系統,具有人員受照劑量低,取樣可達性好,作業效率高,二次廢物量少的特點。
取樣裝置通過視覺系統反饋實時位姿,作業人員根據反饋圖像,通過控制系統調整運動機構到達指定取樣位置進行取樣,整個取樣過程持續時間為2 h,共計完成18個固體樣品取樣,取樣系統達到縱向7 m,橫向覆蓋2.2 m的范圍內的取樣,通過視覺系統確認取樣精確度±10 cm。作業過程中通過遠距離操作、輻射屏蔽以及減少作業時間的方式有效實現了人員的受照劑量的控制,借助液壓動力手的位姿變化,實現了罐內物項的多點位不同深度物項的取樣。取樣系統接觸廢液的部分僅為液壓機械臂前端夾持取樣器,本體受污染程度低,且本體材質為不銹鋼,在擦拭去污后即可進行復用。
4 結論
1AW暫存罐遠距離取樣系統設計考慮了取樣對象的高放射性水平以及高劑量場下作業人員的輻射防護。取樣系統由三軸運動機構、液壓取樣臂、取樣器、控制及監控系統組成,在投入現場取樣使用前經過單體功能調試以及冷試驗驗證,最終成功投入現場應用,完成樣品取樣,為后續分析提供足夠樣品。形成的科技成果可為其他類似核設施源項調查工作提供技術支撐。
存在的問題以及后續研究:
取樣過程中套筒形變程度較大,在設計時雖已利用模擬軟件對取樣過程中的套筒進行力學校核,但在現實取樣應用中液壓機械臂橫向打開時,套筒形變程度大于模擬計算量,導致現實取樣時機械臂無法完全打開,取樣范圍也未能完全覆蓋整個大罐。在后期的技術研究中,針對大罐源項調查以及罐體退役領域,研制大行程、高負載套筒,同時在不降低性能的情況下對液壓機械手進行小型化,緊湊化。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(2013年3期)2013-06-24 05:40:30