雙側浮動仿形電液農機履帶底盤設計與仿真分析*
2022-09-20 03:53:38岳丹丹李沐桐陳中武周廣亮
南方農機 2022年18期
岳丹丹 , 李沐桐 , 何 林 , 陳中武 , 張 軒 , 周廣亮
(1.農業農村部華南現代農業智能裝備重點實驗室,廣東 廣州 510630;2.廣東省現代農業裝備研究所,廣東 廣州 510630;3.廣東弘科農業機械研究開發有限公司,廣東 廣州 510630)
0 引言
我國是一個農業大國,丘陵山區面積占全國面積40%以上,隨著農業產業結構化的調整,丘陵山區經濟作物的占比逐漸增大[1]。但目前丘陵山區農業機械化程度仍遠遠落后于平原地區,其主要原因是丘陵山區地形起伏不平、作業地塊小和立地條件差等。相較于輪式底盤,履帶式底盤具有接地比壓小、抓地能力強等特點,為了促進丘陵山區農業機械化的進一步發展,開展新型行走底盤結構研究有一定的現實意義[2-4]。
現有的行走底盤包括剛性輪式底盤、浮動輪系履帶底盤、多自由度爬坡底盤、多桿件變形底盤等。剛性輪式底盤的穩定性較好,但地面仿形能力較差,只適用于大田作業;浮動輪系履帶底盤只具有履帶內部仿形功能,其仿形幅度也較小,適合部分過溝越障作業,不能保障大坡度行走;多自由度爬坡底盤主要通過設置懸架結構,形成底盤聯動特性,多數只針對俯仰方向的仿形,而部分具有側翻角方向的仿形結構較復雜,維修難度較大[5-7]。
為提高丘陵山地農業機械的通過性,促進果園機械的發展,課題組采用機-電-液組合形式開發了動力驅控系統,結合旋點式浮動結構設計了一種仿形電液履帶底盤。
1 總體闡述
1)總體結構。雙側浮動仿形電液履帶底盤主要包括旋點式浮動行走底盤與動力驅控系統,其整體結構如圖1所示。其中,旋點式浮動行走底盤包括底盤架、行走履帶、自調組合裝置、平衡尾板等,動力驅控系統主要包括發動機、傳動系統、電磁離合器、液壓系統、連桿控制裝置等。
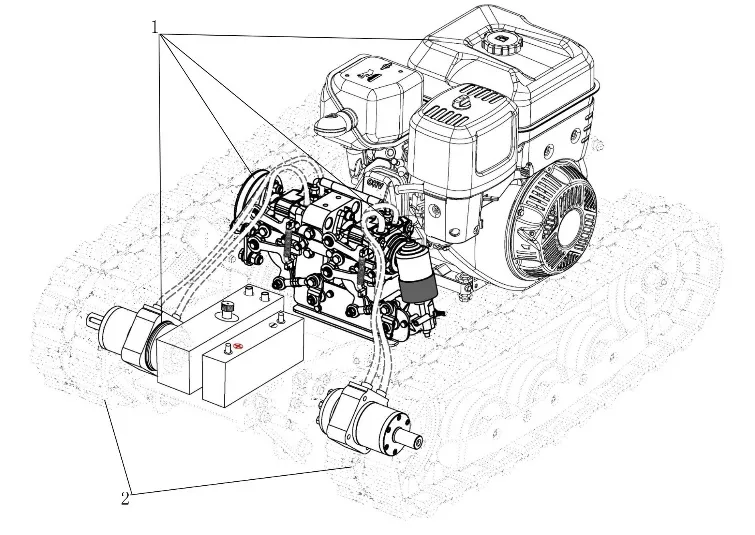
圖1 整體結構
2)工作原理。發動機工作帶動柱塞泵轉動,通過調節與柱塞泵相連接的連桿機構控制液壓馬達流量,從而實現左右驅動輪的運轉與差速,依靠驅動輪與履帶旋轉運動獲得地面摩擦力,實現機器前后、轉向等運動。雙側浮動仿形電液履帶底盤工作時,底盤上設置的平衡尾板通過平衡旋點連接裝置可旋轉地與底盤架連接,然后再將平衡尾板的兩端通過彈性補償連接裝置連接支撐至行走裝置上,在復雜的地形環境中行走裝置的上下起伏,帶動平衡尾板兩端上下浮動,提高底盤在不規則丘陵山區行走的仿形能力。
3)技術參數。根據履帶運輸機的應用環境、工作要求,分析出運輸機用的發動機額定功率、最大行走速度、最大爬坡度等技術參數。具體參數如下:發動機額定功率為10.5 kW,整機重量為345 kg,最大行駛速度為6 km/h,最大爬坡角度為25°。
2 關鍵部件設計與建模
2.1 動力驅控系統
為滿足我國華南地區農機裝備的發展需求,需結合自動化、智能化和信息化技術,針對性地設計機-電-液一體化的雙側浮動仿形履帶底盤,以提高其快速驅動和精準控制性能,底盤動力驅控系統工作原理圖如圖2所示。當需要執行作業部件工作時,只需控制電磁離合器上電吸合,此時離合帶輪與常轉帶輪保持同步轉動,進而帶動從動帶輪驅動執行作業部件工作;當停止工作時,只需將電磁離合器斷電即可。
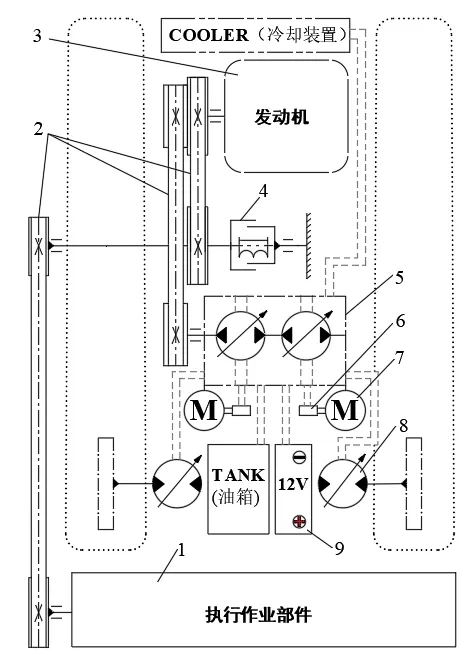
圖2 動力驅控系統分布圖
當需要底盤行駛時,通過汽油發動機帶動斜盤式變量柱塞串泵,將角度傳感器集成于電機內,并設置在斜盤式變量柱塞串泵兩側獨立驅動的組合連桿機構內,分別控制左右兩個扁軸轉角,并通過角度傳感器實時反饋角度數值,進而控制泵內斜盤傾角的大小和方向,以調節左右液壓馬達的流量方向和流量大小,實現對履帶兩側驅動輪的轉向和轉速控制。
2.2 浮動行走底盤
浮動行走底盤結構簡圖如圖3所示,浮動行走底盤設有平衡尾板,平衡尾板通過平衡旋點連接裝置可旋轉地與底盤架連接,然后再將平衡尾板的兩端通過彈性補償連接裝置連接支撐至行走裝置上。行走裝置在復雜地形環境中的上下起伏,通過平衡尾板得到補償,提高底盤在不規則丘陵山區行走的仿形能力,增強了通過性,使得行走底盤更加適用于復雜的地形環境。
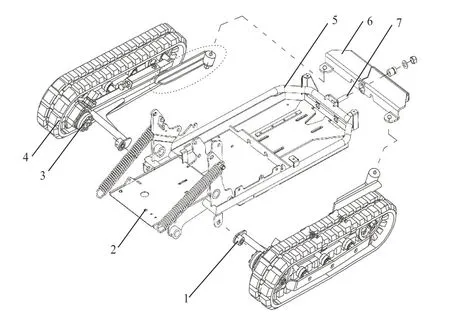
圖3 浮動底盤結構圖
2.3 整機建模
對雙側浮動仿形電液履帶底盤爬坡性能進行仿真分析時,履帶底盤動力學模型的建立分為兩個步驟:第一,在Inventor中繪制三維模型;第二,聯合RecurDyn進行動力學模型建立。為了提高RecurDyn動力學分析軟件的運算速度,首先在保證履帶底盤整體結構與質心不變的情況下,在Inventor中可對履帶運輸機中不重要的機械結構、部件進行省略,忽略真實履帶運輸機上具有的焊接細節[8-9]。其次采用多體單元組合法,利用RecurDyn軟件對履帶運輸機進行建模。此履帶運輸機由機身、運輸機頭以及履帶系統組成,履帶系統包含左、右兩側履帶,每側履帶子系統由1個驅動輪、1個張緊輪、3個負重輪和30塊橡膠履帶板組成,如圖4所示。
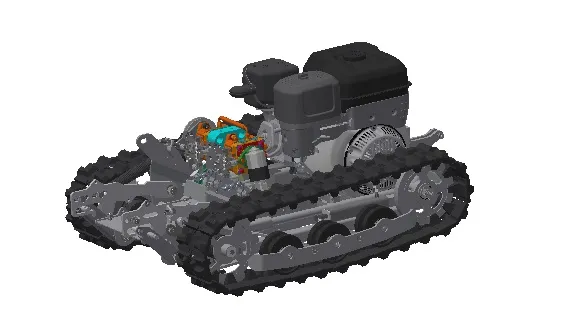
圖4 整機三維圖
3 動力學仿真分析
3.1 添加約束
為了對履帶運輸機在爬坡工況下進行合理、有效的動力學仿真分析,需要對履帶運輸機仿真系統所建模各組件添加約束以及運動副關系。其中,履帶系統和機身部分采用固定約束,驅動輪與機身采用轉動副約束,支重輪和履帶支撐架采用轉動副約束,張緊裝置和履帶支撐架采用平移副約束,履帶支撐架和機身采用固定副約束,30個履帶板之間采用軸套約束。進一步在RecurDyn中對履帶運輸機行駛接觸的路面進行定義,履帶運輸機多行走在丘陵山地中田間路面,分析運輸機在兩種不同路面下的性能。通過借鑒參考文獻以及仿真分析經驗,設置田間路面具體參數取值:黏聚力模量取42 kN/mn+1,內摩擦力模量取9 kN/mn+2;土壤變形指數取0.82,土壤含水率取37%,土壤堅實度取93.5,履帶輪與地面的摩擦系數設置為0.7[10-12]。
基于上述建立的履帶底盤動力學模型與丘陵山地路面模型,選取履帶運輸機以最大設計車速6 km/h(1.67 m/s)在上述路面進行仿真分析,由驅動輪節圓直徑為197 mm,可得驅動輪角速度為ω1。為了確保挖掘機直線行駛,需對虛擬樣機中左右兩條履帶的驅動輪施加相同的速度驅動。定義驅動函數為IF(TIME-1:0,0,IF(TIME-2:STEP(TIME,1,0,2,-834d), -834d,STEP(TIME,6,-834d,7,0))),即0~1 s履帶底盤驅動輪處于準備狀態,1 s~2 s履帶底盤履帶處于加速狀態,6 s~7 s底盤履帶從最高速度減速至0。
3.2 爬坡仿真分析
根據履帶運輸機爬坡路面的特點,軟件中的路面寬度設定為1 500 mm,路面坡度選取設計的履帶運輸機最大坡度25°。設定運輸機以最大速度6 km/h爬坡行駛,爬坡路面模型如圖5所示,仿真所得到的質心水平位移與水平速度如圖6與圖7所示。
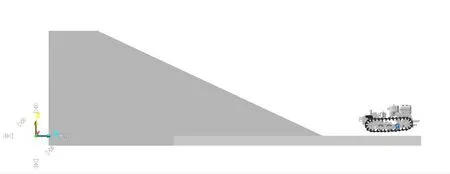
圖5 爬坡仿真界面
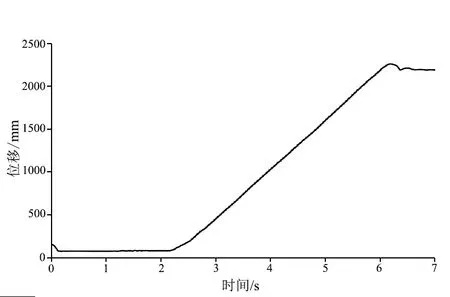
圖6 質心Z向位移變化曲線
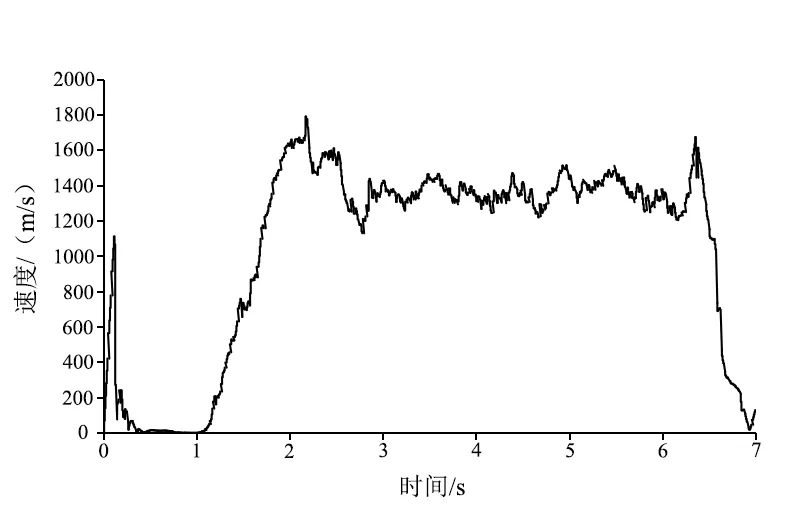
圖7 質心速度變化曲線
由圖5可知,仿真時,履帶底盤的初始狀態距地面有一定高度。由圖6與圖7可知,0~0.4 s區間內,車身質心Z向位移向下,0.4 s時,履帶底盤從地面上方自由落體到地面;0.4 s~1 s區間內,履帶底盤處于靜止狀態,質心速度與位移高度無變化;1 s~2 s區間內,履帶底盤在平地做加速運動,速度從0變化至6 km/h;2 s~6 s區間內,履帶底盤爬上坡面,此時質心Z方向的位移均勻上升,質心速度趨于穩定;6 s~7 s區間內,履帶底盤爬上坡頂,質心Z向位移不再變化,速度變化至0。
由圖6與圖7可得,雙側浮動仿形電液履帶底盤能夠以6 km/h的設計車速越過25°的坡度,且其質心速度曲線與位移曲線變化穩定,表明課題組設計的履帶底盤結構設置合理。
4 結論
針對統行走底盤在丘陵山區不規則路面通過性較差、仿形能力弱等問題,設計了一種仿形電液履帶底盤。首先,對行走底盤進行機械原理設計、動力分布優化,完成樣機的三維模型建立;其次,利用多體單元組合法創建了履帶底盤動力學模型,完成了路面模型接觸參數虛擬標定;最后,針對坡度路面進行了爬坡性能仿真分析。仿真結果顯示,該履帶底盤能以6 km/h的設計車速越過25°的坡度,且其質心速度曲線與位移曲線變化穩定。因此,該行走底盤在最高時速狀態下仍能安全通過設計坡度,表明此動力學分析方法對履帶底盤分析有參考意義,在一定程度上能降低設計成本。