基于粒子群算法的風(fēng)電場(chǎng)參數(shù)辨識(shí)研究*
2022-09-27 00:31:32謝霖偉雷冠珠楊麗潔何增輝李苗苗
甘肅科技 2022年11期
謝霖偉,雷冠珠,楊麗潔,何增輝,李苗苗
(河西學(xué)院 物理與機(jī)電工程學(xué)院,甘肅 張掖 734000)
1 概述
在節(jié)能減排的大背景下,風(fēng)電產(chǎn)業(yè)發(fā)展迅速。甘肅省酒泉地區(qū)風(fēng)能資源豐富,建成了國(guó)家首個(gè)千萬(wàn)千瓦級(jí)風(fēng)電基地。隨著大規(guī)模的風(fēng)電并網(wǎng),電力系統(tǒng)的安全運(yùn)行受到了挑戰(zhàn)[1]。一方面,由于風(fēng)能的出力具有間歇性和波動(dòng)性,導(dǎo)致風(fēng)電場(chǎng)的輸出功率存在波動(dòng)性[2]。另一方面,風(fēng)電并網(wǎng)需要大量的電力電子設(shè)備進(jìn)行控制,增加了電力系統(tǒng)的耦合性[3]。上述特性使得建立高精度的風(fēng)電場(chǎng)模型成為當(dāng)前的研究熱點(diǎn)之一。
高精度風(fēng)電場(chǎng)模型的建立有利于分析評(píng)估風(fēng)電場(chǎng)的風(fēng)能資源,風(fēng)電并網(wǎng)對(duì)系統(tǒng)的影響,以及風(fēng)電場(chǎng)發(fā)電的預(yù)測(cè)和風(fēng)電機(jī)組選型等[4]。本研究采用馬鬃山和酒泉的風(fēng)速數(shù)據(jù),基于粒子群算法辨識(shí)了威布爾風(fēng)電場(chǎng)模型的參數(shù),并與窮舉算法的仿真實(shí)驗(yàn)結(jié)果進(jìn)行了比對(duì),獲得了較高精度的風(fēng)電場(chǎng)模型。
2 問題描述
2.1 參數(shù)辨識(shí)
參數(shù)辨識(shí)技術(shù),是根據(jù)滿足某個(gè)模型的實(shí)際數(shù)據(jù)對(duì)該模型的未知參數(shù)進(jìn)行辨識(shí)的過程。參數(shù)辨識(shí)是根據(jù)實(shí)際測(cè)試數(shù)據(jù)和建立的模型來(lái)確定模型中的未知參數(shù)值,使得通過該模型得到數(shù)據(jù)能夠較好的擬合實(shí)際測(cè)試數(shù)據(jù),從而給未知的過程進(jìn)行預(yù)測(cè),為研究一些帶參數(shù)的模型問題提供理論指導(dǎo)[5]。
在各個(gè)領(lǐng)域的技術(shù)研究與應(yīng)用過程中,參數(shù)辨識(shí)起著至關(guān)重要的作用。傳統(tǒng)辨識(shí)算法在迭代過程中屬于無(wú)方向搜索,穩(wěn)定性和搜索能力較差;而最小二乘算法,包括一些變種,如遞推最小二乘、漸消最小二乘等都需要對(duì)矩陣求逆,計(jì)算過程復(fù)雜繁瑣。因此,如何提高非線性系統(tǒng)參數(shù)辨識(shí)算法的性能成為研究者們關(guān)注的重點(diǎn)問題。
由于傳統(tǒng)參數(shù)辨識(shí)方法存在局限性,在啟發(fā)式優(yōu)化算法,如粒子群優(yōu)化算法、遺傳算法等,在參數(shù)辨識(shí)方面得到較快地發(fā)展。本研究中采用粒子群算法將參數(shù)辨識(shí)問題轉(zhuǎn)化為優(yōu)化問題進(jìn)行研究。
2.2 威布爾風(fēng)電場(chǎng)模型
本研究采用馬鬃山和酒泉2020年3月23日—2020年4月23日逐小時(shí)的風(fēng)速數(shù)據(jù)(風(fēng)速數(shù)據(jù)來(lái)源于中國(guó)氣象數(shù)據(jù)網(wǎng)http://data.cma.cn/site/index.html),計(jì)算風(fēng)速數(shù)據(jù)的概率分布以及威布爾(welbull)分布函數(shù),對(duì)威布爾分布函數(shù)中的形狀系數(shù)和尺度系數(shù)進(jìn)行辨識(shí)。風(fēng)速數(shù)據(jù)的威布爾分布函數(shù)如式(1)所示:

式中:v為風(fēng)速(m/s),k、c分別為威布爾形狀系數(shù)和尺度系數(shù),c反映該地區(qū)的平均風(fēng)速大小,k的取值范圍一般在1.8~2.3[6]。
威布爾模型是一個(gè)重要的預(yù)測(cè)模型,大部分地區(qū)風(fēng)速數(shù)據(jù)都符合威布爾模型,該模型為指數(shù)函數(shù),具有高度非線性,可靠性強(qiáng)。本研究基于粒子群算法,對(duì)風(fēng)電場(chǎng)模型進(jìn)行參數(shù)辨識(shí),以誤差平方和最小值為優(yōu)化目標(biāo),得到最優(yōu)的風(fēng)電場(chǎng)模型參數(shù)。
2.3 實(shí)際風(fēng)速數(shù)據(jù)的概率分布
風(fēng)電場(chǎng)的風(fēng)速數(shù)據(jù)符合離散型隨機(jī)變量[7],本文通過計(jì)算馬鬃山和酒泉風(fēng)速數(shù)據(jù)的概率分布函數(shù),對(duì)威布爾模型(Weibull)中的參數(shù)進(jìn)行辨識(shí)。
設(shè)離散型隨機(jī)變量X所有可能取值為xk(k=1,2…),X取各個(gè)可能值的概率,即事件{X=xk}的概率,為

由概率的定義,pk滿足如下兩個(gè)條件:

則稱(2)式為離散型隨機(jī)變量X的分布律。
設(shè)F為該隨機(jī)變量的概率分布,則每一個(gè)隨機(jī)變量的概率分布為:

由式(2)~(4),可得到實(shí)際風(fēng)速的概率分布。
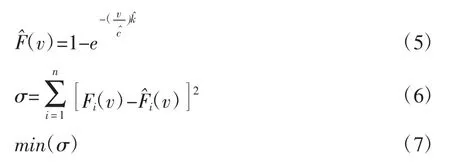
在參數(shù)辨識(shí)后,辨識(shí)的概率分布函數(shù)如式(5)所示,式中k^為辨識(shí)的形狀系數(shù),c^為辨識(shí)的尺度系數(shù)。辨識(shí)誤差的平方和σ表達(dá)式如式(6)所示,Fi(v)式中實(shí)際風(fēng)速的概率分布,F(xiàn)^i(v)為辨識(shí)風(fēng)速的概率分布。以實(shí)際概率分布與辨識(shí)概率分布的誤差平方和最小為優(yōu)化目標(biāo),目標(biāo)函數(shù)如式(7)所示。
3 研究方法
粒子群算法(Particle Swarm Optimization,PSO)最早是由Eberhart和Kennedy于1995年提出,它的基本理念是從研究鳥群覓食行為中得到啟發(fā)的[8]。基本的粒子群算法可表示為:首先,初始化一組隨機(jī)粒子,每個(gè)粒子代表一個(gè)個(gè)體,對(duì)應(yīng)一個(gè)適應(yīng)度值,根據(jù)適應(yīng)度值判斷個(gè)體的好壞[9]。粒子群算法通過搜索全局范圍粒子解來(lái)得到優(yōu)化問題的最優(yōu)解。而參數(shù)辨識(shí)的本質(zhì)是優(yōu)化問題,粒子的維數(shù)為辨識(shí)參數(shù)的數(shù)量[10-11]。
假設(shè)一個(gè)維目標(biāo)搜索空間,有個(gè)粒子組成的群體,第個(gè)粒子在搜索空間中的位置和速度可表示為Xi=(x1i,x2i,…xDi),Vi=(v1i,v2i,…vDi,i=(1,2…,m)。設(shè)表示第個(gè)粒子個(gè)體搜索到的最優(yōu)位置,表示整個(gè)粒子群搜索到的最優(yōu)位置,對(duì)粒子的速度、位置更新如式(8),(9)所示:

慣性權(quán)重[11]表達(dá)式如式(10)所示:

式中:w(是慣性權(quán)重,wstart=0.9,wend=0.4;Vi為粒子的速度;Xi為粒子的位置;r1,r2是分布于[0,1] 之間的隨機(jī)數(shù);c1、c2為學(xué)習(xí)因子;Tmax為最大迭代次數(shù);k為當(dāng)前迭代次數(shù)。本研究采用粒子群算法,辨識(shí)威布爾分布函數(shù)的形狀系數(shù)和尺度系數(shù),以期得到最佳的辨識(shí)結(jié)果(最小的σ)。粒子群算法的流程圖如圖1所示。
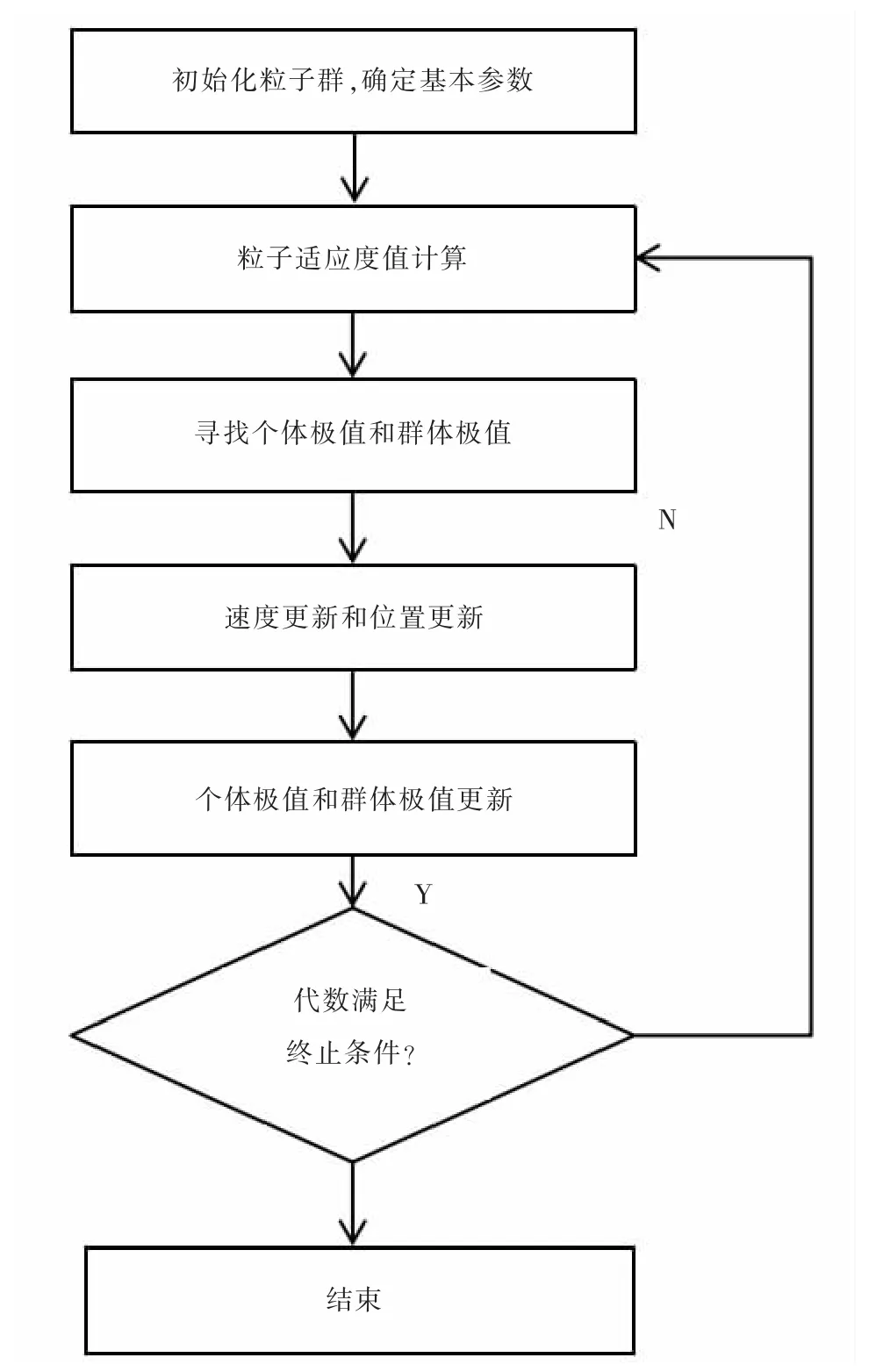
圖1 粒子群算法流程圖
4 實(shí)驗(yàn)結(jié)果與分析
4.1 參數(shù)設(shè)置
本研究采用馬鬃山和酒泉2020年3月23日—2020年4月23日逐小時(shí)的風(fēng)速數(shù)據(jù),基于粒子群算法辨識(shí)風(fēng)電場(chǎng)模型的參數(shù),并與窮舉算法進(jìn)行了結(jié)果對(duì)比。
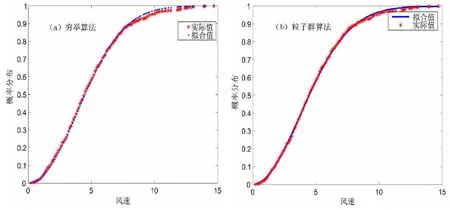
圖2 馬鬃山風(fēng)速數(shù)據(jù)的概率分布曲線
窮舉算法是在參數(shù)范圍內(nèi)等間隔取數(shù),將窮舉的參數(shù)代入目標(biāo)函數(shù),求得誤差平方和最小的參數(shù)值。本研究中,威布爾函數(shù)模型中的形狀系數(shù)k在1.8~2.3范圍內(nèi)以步長(zhǎng)為0.001窮舉,尺度系數(shù)c在平均風(fēng)速上下限50%范圍內(nèi)等間距窮舉500個(gè)數(shù),將參數(shù)代入目標(biāo)函數(shù),可得誤差平方和最小的一組參數(shù)。
本文粒子群算法的參數(shù)設(shè)置為:粒子數(shù)200,粒子的最大速度搜索范圍的20%,學(xué)習(xí)因子c1,c2為2,慣性權(quán)重在0.9~0.4做線性遞減變化。
4.2 結(jié)果分析
根據(jù)上述風(fēng)速數(shù)據(jù),可得馬鬃山風(fēng)速數(shù)據(jù)的概率分布擬合曲線,如圖2所示,酒泉風(fēng)速數(shù)據(jù)的概率分布擬合曲線,如圖3所示,誤差分析見表1。
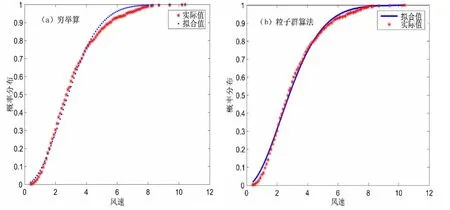
圖3 酒泉風(fēng)速數(shù)據(jù)的概率分布曲線

表1 誤差分析
由圖2,圖3,表1可見,粒子群算法的實(shí)驗(yàn)仿真結(jié)果較好(σ更小)。針對(duì)對(duì)馬鬃山風(fēng)電場(chǎng),當(dāng)k^=1.978 5,c^=5.364 9時(shí),實(shí)際風(fēng)速數(shù)據(jù)與辨識(shí)的風(fēng)速數(shù)據(jù)之間的概率分布誤差平方和σ最小,σ=0.006 0;采用窮舉算法時(shí),在k^=2.076 0,c^=5.354 2時(shí),實(shí)際風(fēng)速數(shù)據(jù)與辨識(shí)的風(fēng)速數(shù)據(jù)之間的概率分布誤差平方和σ最小σ=0.012 6。針對(duì)酒泉風(fēng)電場(chǎng),當(dāng)k^=1.865 6,c^=3.390 4時(shí),實(shí)際風(fēng)速數(shù)據(jù)與辨識(shí)的風(fēng)速數(shù)據(jù)之間的概率分布誤差平方和σ最小,σ=0.029 1;采用窮舉算法時(shí),在k^=2.070 0,c^=3.374 9時(shí),實(shí)際風(fēng)速數(shù)據(jù)與辨識(shí)的風(fēng)速數(shù)據(jù)之間的概率分布誤差平方和σ最小,σ=0.050 3。可見,采用粒子群算法辨識(shí)風(fēng)電場(chǎng)模型,可獲得更佳的形狀系數(shù)和尺度系數(shù),從而獲得較高精度的風(fēng)電場(chǎng)模型。
5 結(jié)論
本研究采用馬鬃山和酒泉風(fēng)電場(chǎng)風(fēng)速數(shù)據(jù),對(duì)威布爾分布的風(fēng)電場(chǎng)模型進(jìn)行參數(shù)辨識(shí)。該風(fēng)電場(chǎng)模型具有高度的非線性,服從指數(shù)分布。由于風(fēng)電場(chǎng)模型的上述特點(diǎn),采用傳統(tǒng)參數(shù)遍歷方法面臨參數(shù)搜索精度不高,誤差大的問題。粒子群算法可廣泛應(yīng)用于各種非線性模型的參數(shù)辨識(shí),該算法具有多點(diǎn)尋優(yōu)、計(jì)算量小、快速收斂等特點(diǎn)。本研究采用粒子群算法進(jìn)行參數(shù)辨識(shí),并與窮舉算法進(jìn)行了結(jié)果對(duì)比。研究結(jié)果表明粒子群算法進(jìn)行參數(shù)辨識(shí)時(shí),得到的馬鬃山和酒泉風(fēng)電場(chǎng)模型與實(shí)際風(fēng)速數(shù)據(jù)概率分布相比,最小的誤差平方和σ分別為0.006、0.012 6;窮舉算法進(jìn)行參數(shù)辨識(shí)時(shí),得到的馬鬃山和酒泉風(fēng)電場(chǎng)模型與實(shí)際風(fēng)速數(shù)據(jù)概率分布相比,最小的誤差平方和σ分別為0.029 1、0.050 3。由辨識(shí)誤差結(jié)果對(duì)比可知,使用粒子群算法進(jìn)行參數(shù)辨識(shí)的誤差更小,辨識(shí)的參數(shù)精度較高。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
電測(cè)與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15