水稻分蘗顆粒肥無人機投放電控系統設計
2022-09-29 01:49:12呂霞
農業科技與裝備 2022年4期
呂 霞
(遼寧省農業機械化研究所,沈陽 110161)
水稻分蘗期需要大量的氮、鉀、磷元素。傳統水稻施肥大多是人工施撒,效率低,耗費大量人力資源,而現有的機械施肥裝置體積大,行走受限。為此,設計一種無人機投放化肥裝備。其投放系統通過電控系統操控,完成不受地形限制的高效率精準施肥功能。 闡述撒肥機數據控制信號的來源,分析電控系統內部控制模塊選用及所選STC89C51RC 芯片的軟件算法,以期為水稻分蘗顆粒肥無人機投放提供參考。
1 水稻分蘗期數據控制信號的來源
劃分2 個區域作為試驗田,分別作為采集組和對照組。 采集測定對照組內的稻田土壤、水體和水稻的氮、鉀、磷含量,并對采集數據進行處理,作為驗證采集組準確性的參考。采集組用六旋翼無人機進行高光譜檢測拍照,于早7 點到9 點進行采集,防止陽光光照過強導致光譜污染。無人機采集區域設立幾個交點定點,保證無人機在指定軌道飛行。
高光譜成像方法是先經過影像預處理提取一些波值,采集定點數據后進行幾何精校正,通過定點值、矢量方向描繪出大致影像,再進行影像處理。然后,通過直方圖匹配、色彩合成、影像拼接合成直觀圖影像。高光譜成像過程如圖1 所示。
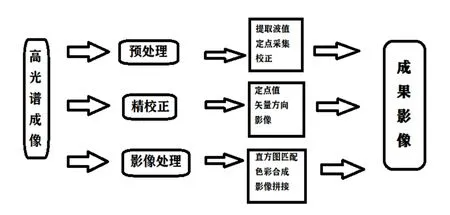
圖1 高光譜成像過程Figure 1 Hyperspectral imaging process
光譜圖像中含有土壤、水體、水稻3 種物質。為得到水稻內的元素含量,需要進行圖像解混,用最小噪聲法將噪聲分離開,提取水稻內的元素含量。 通過算法繪出曲線圖,提取水稻元素含量數據。 數據信號為肥料施撒量的標準。
2 撒肥機內部控制模塊的選用
2.1 控制芯片
選用性價比高的STC89C51RC 單片機(如圖2),裝有4K 可編程FLASH 存儲器,具有高速、低功耗的優點。 具有穩定的脈沖信號, 能夠實現對電機的控制,從而控制電機施撒肥料數量。 STC89C51RC 單片機有豐富的引腳與外部設備連接,并設有獨立的ISP編程器。
圖2 STC89C51RC 芯片Figure 2 STC89C51RC chip
2.2 測距模塊
測距模塊選用超聲波傳感器TELESKY US-100(如圖3), 用以計算無人機距離地面的高度,傳達脈沖信號。 當距離地面大于5 m 時,觸發一個高電平信號,再由系統檢測發出信號檢測回波信號,將距離值轉化成時間值,計算出與地面的高度。

圖3 超聲波傳感器Figure 3 Ultrasonic sensor
2.3 步進電機
選用 42HS40ECL06 步進電機(如圖 4)。 用以將收到的電信號轉化成角位移或者線位移。步進電機無法直連在交流、直流電路中,需用專用的驅動器(10~40 V 直流電、24~36 V 驅動電)。 步進電機配合齒輪齒條控制移動面板, 通過移動面板移動帶出肥料,控制另一條鏈條啟動攪拌棒。

圖4 步進電機Figure 4 Stepping motor
3 基于STC89C51RC 芯片的軟件算法設計
電控系統有2 個部分運用算法。一是高光譜成像后對圖像進行解混,去除不必要的噪聲,利用最小噪聲法分離圖像噪聲,再用純凈像元指數法提取高光譜曲線,通過建模、反演模型等得到可靠數據,進而得到水稻元素含量缺少量并作為數據控制信號。二是以水稻含量缺少量為信號值,啟動撒肥機電源,計算投放元素缺少量 (即第一部分算法得到的水稻元素缺少值)的所需時間、投放速度和傾斜角度。當無人機高度大于5 m 時發出啟動信號,再由系統檢測回波信號。PWM 脈沖輸出信號控制2 個電機投放, 投放結束后循環掃描新區域,如此進行若干循環,直至當前試驗地內的水稻肥料投放量達標。整個算法的設計流程如圖5 所示。
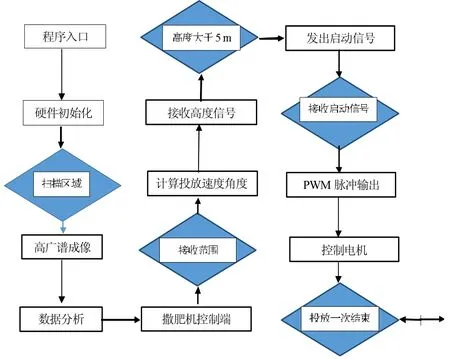
圖5 算法設計流程Figure 5 Algorithm design flow
先將程序初始化,通過掃描拍攝得到數據的控制信號,無人機接收到數據控制信號后上升。 當離地面高于5 m 時, 超聲傳感器發波信號至STC89C51RC芯片。 STC89C51RC 單片機通過PWM 信號控制電機正轉反轉,利用延時函數控制時間間隔,再進行掃描。如此不斷循環,直至數據信號傳達結束。
猜你喜歡
青少年科技博覽(中學版)(2022年6期)2022-12-27 19:44:27
今日農業(2021年21期)2021-11-26 05:07:00
軍事文摘(2021年22期)2021-11-26 00:43:51
今日農業(2021年14期)2021-10-14 08:35:40
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
文苑(2020年6期)2020-06-22 08:41:52
文苑(2019年22期)2019-12-07 05:29:00
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
