面向智能空戰的它機協同試飛驗證方法
2022-10-09 01:27:14張少卿王言偉王振宇劉志軍
導航定位與授時 2022年5期
王 悅,張少卿,王言偉,王振宇,王 玥,劉志軍,張 濤
(1. 沈陽飛機設計研究所綜合航電部,沈陽 110035;2. 北京理工大學機電學院,北京 100081;3. 中北大學機電工程學院,太原 030051)
0 引言
當前,隨著科技發展以及大國間競爭的加劇,傳統攻擊模式已經不能滿足未來復雜的作戰場景,在信息化、網絡化、智能化和體系對抗環境下,有人—無人戰斗機聯合編組,實施智能決策、協同攻擊的作戰方式已成為未來的主要發展方向,主要軍事強國都提出了自己對未來空戰的理解。美國國防部公開的《無人系統綜合路線圖(2017—2042)》中,人機協同被列為四個關鍵主題之一,并在2020年開始正式應用成熟的帶有戰術意義的有/無人機多機編隊技術。
自2015年以來,美國提出了分布式作戰、聯合全域戰、自主空戰等新作戰概念,協同與智能技術是未來空戰的關鍵技術。因此,對協同與智能技術的試飛驗證也是快速實現關鍵能力的重要組成部分。
在美國空戰演進(Air Combat Evolution,ACE)項目實現途徑中,為實施和驗證自主平臺機動算法,推進人工智能技術在單機和編隊戰術行為中的自主空戰機動應用,開發了近距離格斗算法。美國空軍研究實驗室(Air Force Research Laboratory,AFRL)空天博格(Skyborg)項目主要面向空中格斗、情報監視偵察和態勢感知等任務,希望利用人工智能實現無人僚機的自主飛行以及控制、管理部分戰斗任務,提出先在小型但具有代表性的高速替代飛機應用自主飛行控制系統,最終至2023年前創造一型堪比有人戰斗機的自主無人作戰飛機;法、德“未來空戰系統”(Future Combat Air System,FCAS)項目在研制進程中,進行了包含5架由空中客車公司制造的Do-DT25無人機和1架有人駕駛的指控飛機的飛行試驗;美國國防部高級研究計劃局(Defense Advanced Research Projects Agency,DARPA)戰術技術辦公室(Tactical Technology Office,TTO)啟動拒止環境中協同作戰(Collaborative Operations in Denied Environment,CODE)項目,研發先進的自主協同算法和監督控制技術,旨在增強無人機在拒止環境下的作戰能力;波音澳大利亞公司提出了空中力量編組系統(Airpower Teaming System,ATS)忠誠僚機概念,可與E-7A預警機、EA-18G電子戰飛機、F/A-18E/F和F-15E多功能戰斗機等編組協同作戰。
目前,國內也有針對它機試飛所做的一些技術驗證,闖家亮等提出了對機載光電雷達它機試飛技術的研究,驗證了光電雷達在真實試飛環境下的任務效能;姜健等提出了基于它機試飛的航空發動機試驗技術研究,研究了它機試飛平臺飛機搭載發動機的選型原則、設計以及建設等問題;韓春永等提出了嵌入式采集器在它機試飛中的應用,并驗證了其在它機試飛中的功能實現;趙海剛等為滿足某型全數控渦軸發動機試飛的技術需求,搭建了它機試飛平臺并進行試驗,驗證了全數控渦軸發動機的可靠性。
同時,基于一致性的多無人機協同編隊算法的研究,不少學者也提出了自己的見解,如任偉提出了領航-跟隨法、行為控制法是可以被統一到一致性理論的框架中;文獻[14]提出了一種虛擬結構法、領導-跟隨法及基于行為法相結合的方法,提高了機間通信的可靠性;文獻[15]提出了基于雙模模型預測控制方法,設計了領導-跟隨的控制律;文獻[16]提出了一種在四旋翼無人機上驗證基于一致性的時變編隊控制理論。
它機試飛試驗技術論證在國內外的項目中均有開展,本文提出了它機協同試飛驗證方法,采用模塊化封裝以及分層控制的思想,由離線仿真模塊驗證算法;執行層根據控制指令對搭建的無人機平臺進行控制,并且采用地面站和數據鏈保證系統的安全可靠;最后,在搭建的試飛平臺上對融合領航-跟隨以及一致性理論思想的四機協同編隊算法進行了飛行試驗,以驗證設計它機試飛系統的可靠性。
1 它機試飛系統設計與搭建
1.1 系統總體架構
它機試飛驗證系統由仿真驗證系統、無人機平臺、地面站和信息處理系統共同組成。為了實現系統對算法的應用性和適用性,對無人機平臺的搭建和設計分為平臺規劃和場景模擬。平臺規劃實現對它機平臺的改裝設計,包括飛機飛行品質、機動性、多功能通信能力;場景模擬實現對平臺運行環境的設計、交互環境以及自然環境的融合,以盡可能地模擬真機的飛行環境。為了增強驗證系統的穩定性和可靠性,通過地面站實時監控、數據鏈獨立運行,以及信息處理系統實現信息交互,控制無人機平臺,保證其安全穩定。
系統總體架構如圖1所示,驗證系統包括離線仿真模塊、等效試飛模塊和信息交互與反饋模塊。離線仿真模塊為適用于不同條件下的算法驗證,根據實際應用需求,對算法進行設計和編寫。等效試飛模塊根據算法模塊的輸入輸出環境采取相應平臺的設計,對平臺正常運行的環境進行場景模擬,實現相對應算法參數的設置,同時以信息交互環境和自然環境因素為參照,盡可能保證算法在真機環境下的仿真驗證。信息交互與反饋模塊通過地面站對平臺提供實時定位導航,通過串口通信進行數據傳輸,及時調整反饋信息,做好試驗過程中的信息處理,同時保證試驗結束后的平臺回收。
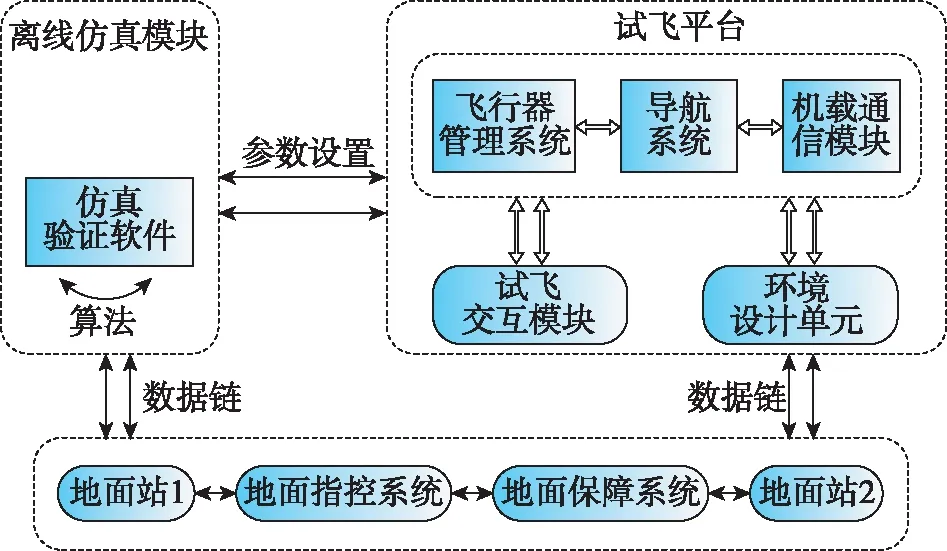
圖1 它機試飛驗證系統總體架構圖Fig.1 Structure chart of test flight verification system
1.2 試驗驗證流程
它機試飛驗證方法具有良好的擴展性,能夠適用于智能空戰環境下不同的算法,且具有很強的適用性,可以對不同算法做有效驗證。本文方法提出的試驗流程包括算法分析、平臺分析及設計、場景分析及設計、等效性分析、仿真驗證、迭代優化、真機驗證以及結果評估。它機試飛試驗驗證流程如圖2所示。
算法分析主要對算法的搭載環境進行分析,通過對比它機和待驗證型飛機試飛算法運行參數,確認算法的輸入輸出是否具有相同的數據性質與類型,可驗證算法的核心運算邏輯是否充分有效。
平臺分析針對它機試飛驗證平臺做功能分析以及架構設計,分析平臺下的系統功能在算法運行決策和外部環境下的變化,以及分析和檢驗平臺系統在各種運行場景下的狀態特性和交互狀況。在平臺選擇過程中,應當充分考慮所選擇平臺的性能比對結果,使之能夠充分滿足算法對于平臺能力的要求以及平臺環境下的實現效果。結合平臺下的應用場景可模擬性,對于待驗證平臺的環境要求,充分設計正常環境與非正常環境以及自然環境,判斷所選擇平臺的環境適配能力能否達到該要求。
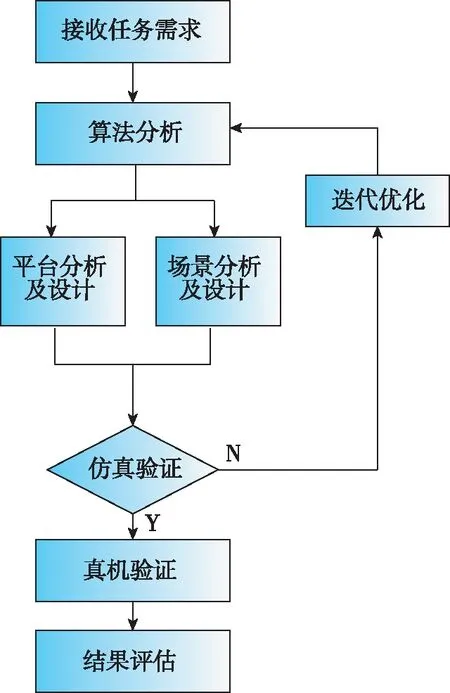
圖2 它機試飛試驗驗證流程Fig.2 Flow chart of test flight verification
等效性分析通過合理的設計使核心算法與外部環境解構,可以在它機上完成對算法功能和性能的驗證。
仿真驗證是經等效性分析后,通過建立仿真模型和仿真試驗對算法、平臺以及場景設計的驗證。通過仿真驗證可以進一步檢驗各個功能模塊設計的合理性以及正確性,從而達到對實際環境的真實模擬和應用,可判斷在設計環節中的優缺點,并做進一步的迭代優化。
真機驗證是在優化解決仿真所暴露出的問題,保證算法、平臺以及環境穩定性和安全性的前提下,對待驗證平臺做進一步的驗證和優化處理。
在進行真機驗證后,應對驗證結果做正確性和合理性分析,對于不滿足驗證要求的結果以及低質量的結果,預估導致結果的可能性,做更深一步的分析處理。
2 四機協同編隊算法
本文采用四機協同編隊算法以驗證它機試飛方法的適用性。在四機協同編隊算法設計中,采用經典的帶自動駕駛儀的三自由度無人機數學模型。無人機根據控制指令使速度保持器、航向角保持器、航跡俯仰角保持器保持飛行,如式(1)所示
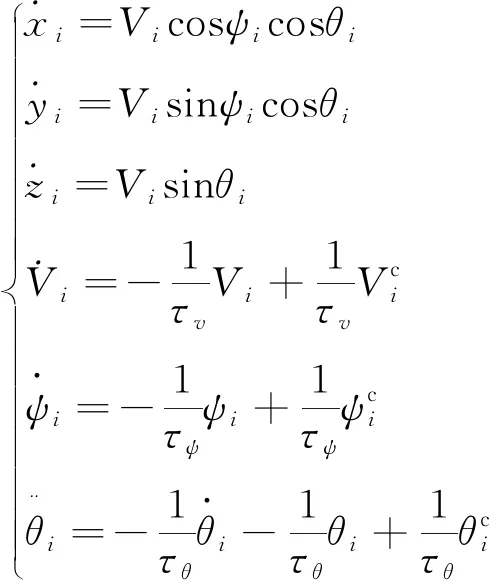
(1)

四機協同編隊算法是在集群系統中,采用長機-僚機控制方法,并融合一致性理論思想,以區別于目前主流的編隊控制算法。將編隊中某架無人機定義成長機,承擔領航任務,其他無人機定義成僚機。僚機跟隨長機運動,根據設置的相對于長機的位置偏移,僚機總是期望保持在長機附近的某一位置,編隊的控制問題也就轉換成了僚機的位置控制問題。僚機跟隨長機運動,將長機和僚機之間的位置誤差轉換為速度、偏航角、航跡俯仰角控制輸入指令,僚機接收這一指令,通過調整航向、速度以及高度改變自身飛行狀態。控制航向角和速度一致性算法,即提出一致平衡點為:所有無人機航向角和速度的加權平均;同時,實際編隊中根據長機提供的期望航向值和期望速度值,保證航向角以及速度的一致性。
航向控制策略如式(2),速度控制策略如式(3),同時式(4)給出高度控制策略,可保證各無人機之間的高度間隔,調整編隊飛行高度避障。當長機檢測到前方有障礙物時,采取的避障策略為調整長機的飛行高度,僚機跟隨長機做高度調整且保持編隊飛行,或者也可以通過編隊變換的方式進行避障,判斷障礙物的間距以及無人機間的最小安全距離,變換隊形直至通過障礙區。
(2)
(3)
(4)

因此,在實際編隊飛行中,通過無人機編隊的橫向平面控制以及縱向平面控制,利用無人機橫縱向解耦的特性,在多無人機空間編隊隊形中采用編隊控制策略如式(5)。通過調整、以及高度控制系數,可以同時指定編隊飛行航向、飛行速度以及飛行高度,控制無人機編隊以指定角度、指定速度和指定高度向期望位置移動。
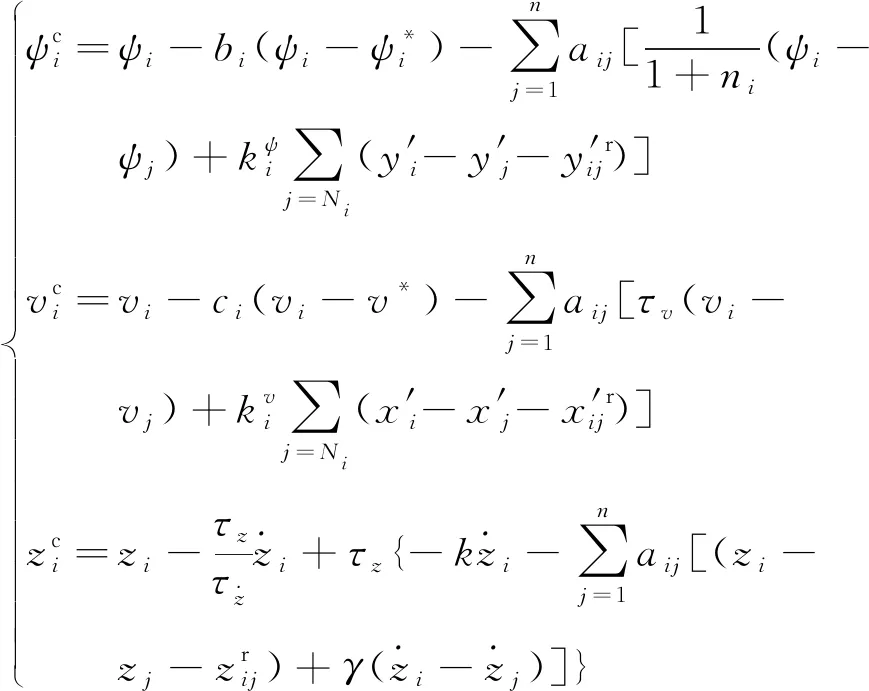
(5)

通過無人機的狀態控制和隊形控制,使多架無人機完成協同編隊。在編隊保持時,隊形矩陣為固定矩陣=[′,′,′];改變隊形時,隊形矩陣則需重新被定義為()=[′(),′(),′()]。按照長機與僚機之間的位置控制以及狀態控制約束,當僚機與長機機間距離滿足式(6),隊形可保持穩定。當編隊中長機出現故障或者檢測不到其他無人機的信號時,定義距離長機最近位置的僚機為新的長機,進行編隊重構;當編隊中某個僚機出現故障,長機根據當前情況調整變換組成新的隊形。
(6)

(7)
其中,、表示控制增益;=[]×,表示編隊內無人機機間間隔信息;=[1,1,…1]∈;符號?表示Kronecker積。
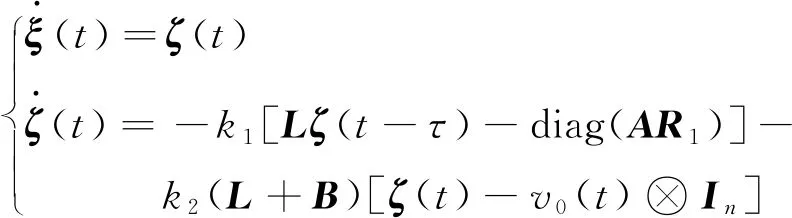
令()=[(-)-diag(),()-()?],可將式(7)表述為動態誤差系統方程為

(8)
其中

定義Lyapunov-Krasovskii函數為

聯立動態誤差系統方程,對其求導可得式(9),其中,=(+)+(+)+τ+,并根據(Schur補引理)進行判定。若存在正定的對稱矩陣、、滿足帶有時延的不等式,誤差系統全局漸進穩定,同時編隊無人機在滿足固定時延的情況下漸進收斂至預定編隊隊形,并使編隊飛行速度趨于一致。
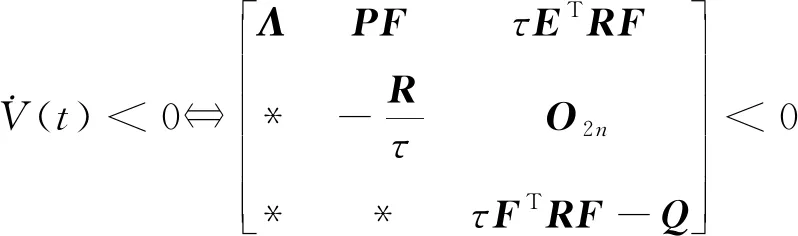
(9)
根據算法原理,編隊算法可實現控制僚機和長機之間的相對運動關系,在算法功能上可實現無人機飛行平臺的解耦,但目前該算法不能涵蓋,如通信受嚴重干擾、全球定位系統(Global Positioning System,GPS)拒止等情況下的編隊場景。因此,未來需要對通信信道干擾及自身定位拒止等環境下如何保持算法編隊能力進行探索研究與試驗。
設計它機試飛無人機成員編隊算法執行流程如圖3所示。同時,在實際試飛過程中,設置每個無人機的初始狀態如表1所示,以及試驗中涉及的相關參數如表2所示。
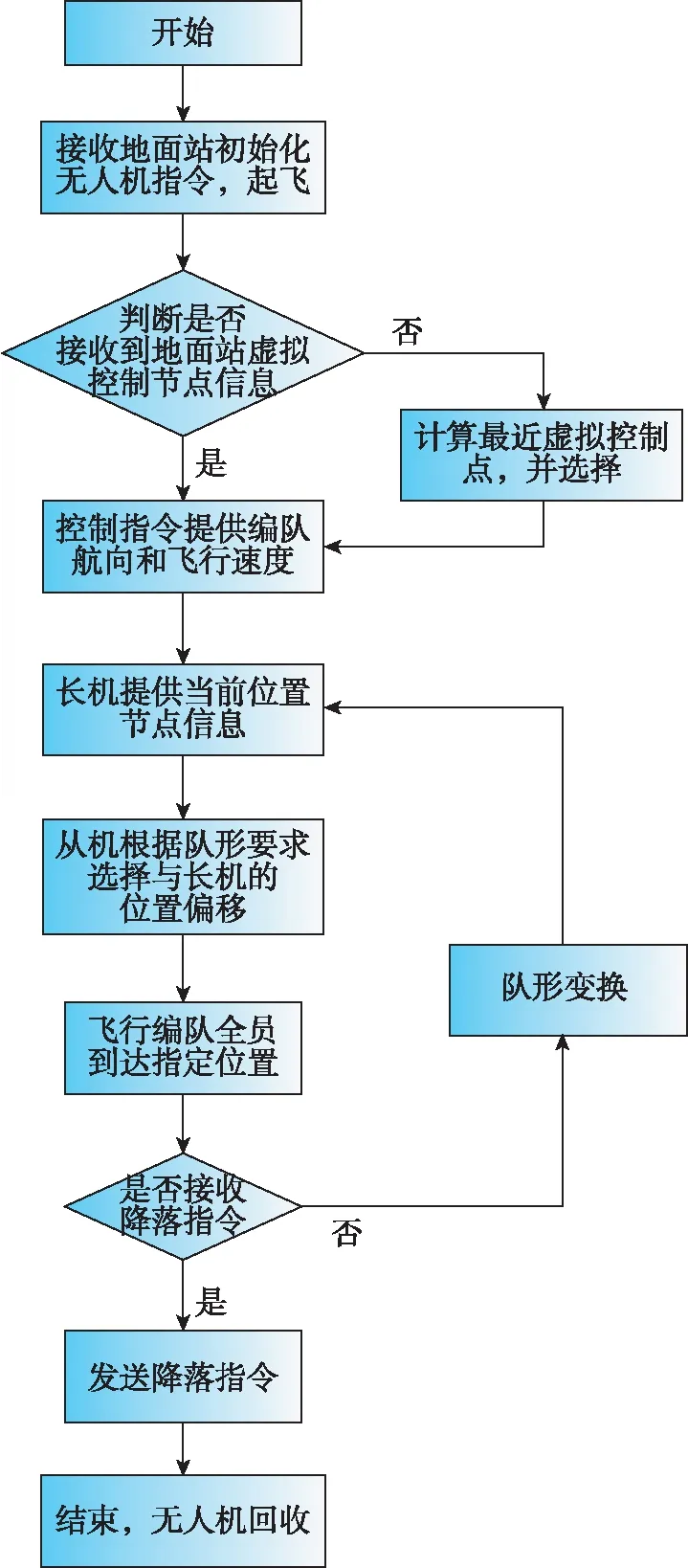
圖3 無人機成員編隊算法執行流程圖Fig.3 Flow chart of UAV formation control algorithm

無人機編號位置/(m,m,m)飛行速度/(m/s)爬升速度/(m/s)航向角/rad6001(0,0,280)205π/66002(40,0,250)277π/76003(20,-30,300)215π/36004(0,-50,290)308π/4
表2 試驗參數取值
3 試驗驗證
設計它機試飛驗證平臺由無人機編隊系統、目標機以及地面指控系統構成。系統實物如圖4所示。

(a)試飛無人機外形圖

(b)地面控制站—測控車圖4 它機試飛驗證平臺系統Fig.4 The test flight verification platform
無人機編隊試飛系統由4架改裝民用無人機、2架目標機和一套地面站設備組成。其中,試飛無人機載重能力不小于30kg,起飛總質量在120~150kg。目標機起飛總質量在20~25kg。試飛樣機平臺由固定翼無人機機體、動力裝置、燃油系統、電源系統、飛行器管理系統、導航系統、大氣數據系統、機載通信系統、機載有效載荷(機載雷達、機載光電探測設備)和起落架等系統或設備組成。地面指控系統由地面控制站和地面保障系統組成,其中地面控制站主要由測控車和控制站組成;地面保障系統主要由地面檢測供電、轉場運輸、常務保障等三部分組成。
試飛試驗選取4架無人機,以6001號為長機,6002、6003、6004號為僚機,主機按程控航路飛行,以長機為基準,僚機由協同編隊算法進行控制。為檢驗算法功能,驗證協同編隊隊形變換的能力,流程為:起飛盤旋集結→楔隊飛行→菱隊飛行→橫隊飛行→返場解散降落。協同編隊隊形變換如圖5所示。
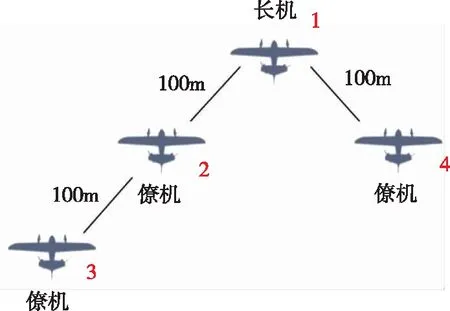
(a) 楔隊隊形
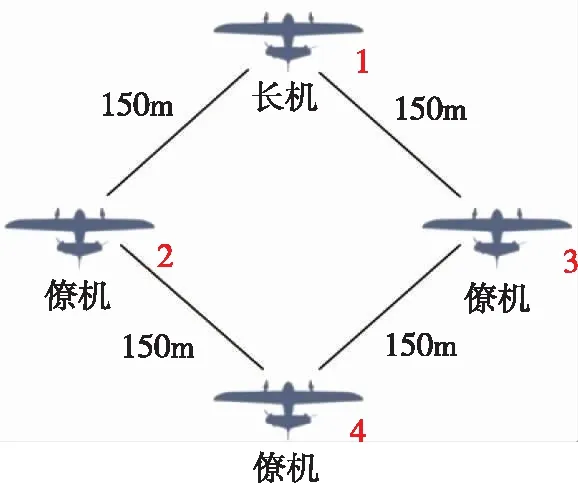
(b) 菱隊隊形
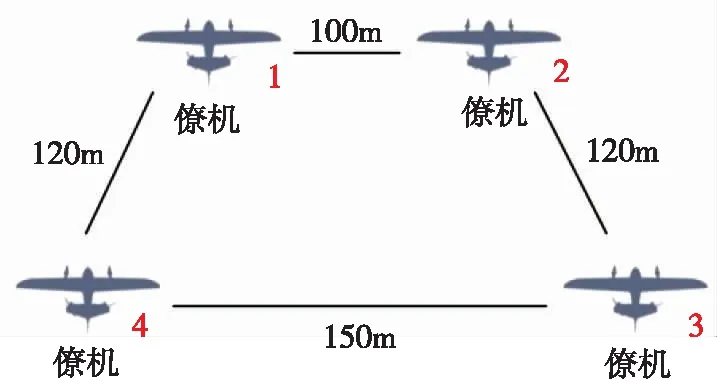
(c) 橫隊隊形圖5 協同編隊隊形變換(楔隊—菱隊—橫隊)Fig.5 Collaborative control of formation change(Wedge team-Diamond team-Transverse team)
無人機編隊飛行有多種實現方式,戰斗機采用集中長僚式編隊的管理通過長機實現。地面站模擬有人機下發指令,長/僚機的角色和位置可以進行變換和調整。由于每架飛機均存儲本次任務航線信息,該信息可以視為橫航向上的基準信息,大大提高編隊控制精度,同時減少編隊內飛機傳輸的信息。
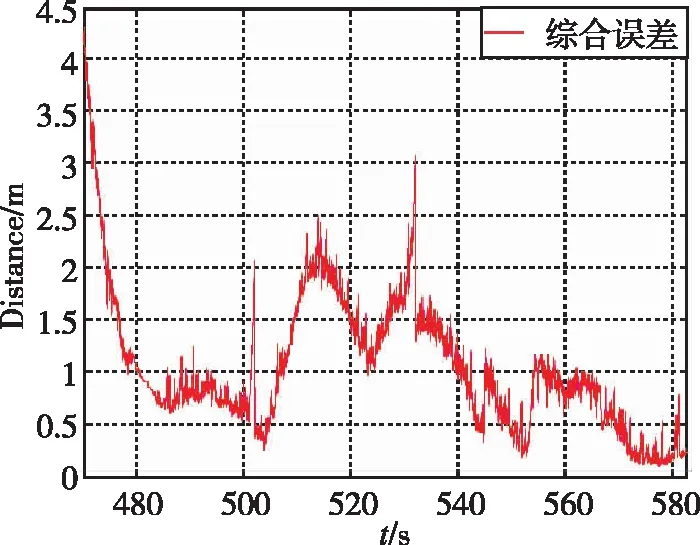
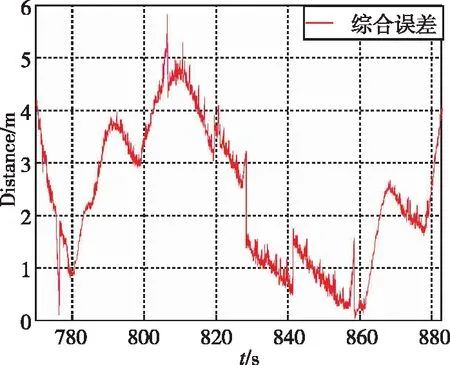
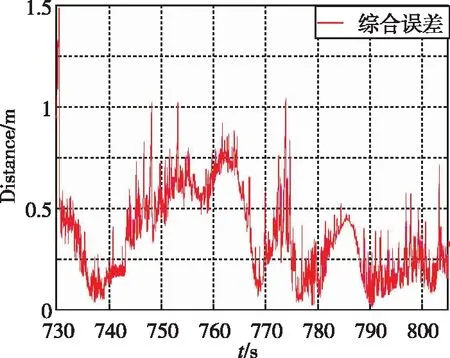
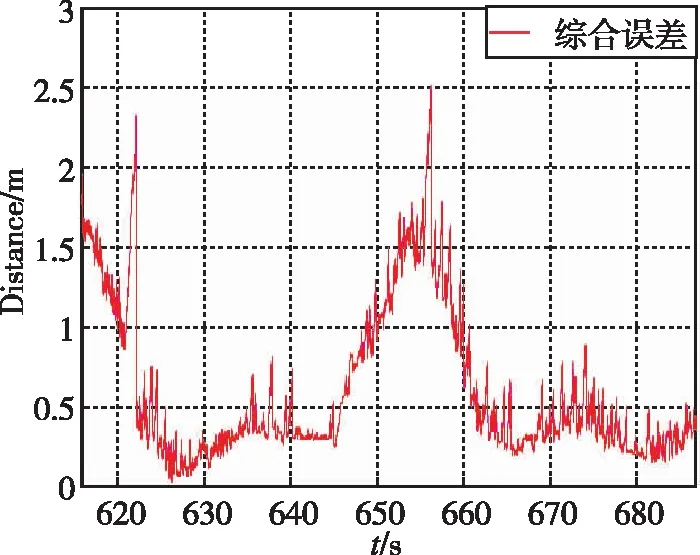
建立編隊坐標系,以長機質心為坐標原點,軸為長機航跡坐標系,軸垂直指向大地,軸在軸右側,符合右手坐標系定義。編隊實際飛行過程中,與存儲的導航信息間的位置誤差定義為編隊導航誤差,即:在隊形保持階段,當長機勻速定高平飛時,以僚機期望位置為起點,指向僚機實際位置的向量。將其投影到編隊坐標系時,分解出、、三個方向的誤差。圖6所示為各編隊飛行時不同飛機的導航誤差。
根據飛行數據記錄以及誤差分析采集方法,分析圖6中不同編隊隊形下無人機飛行導航誤差曲線。由于在同一編隊隊形下,不同飛機的機載計算機開關機時間存在差異,所以表現為飛機的綜合誤差曲線中不同飛機的開機時間與關機時間不同,但是不同飛機的飛行時間區間均保持一致。觀察圖6(a ~ c)發現,楔形編隊飛行保持時間在111s,在飛行保持時間內,各無人機的飛行綜合誤差均小于等于5m;由圖6(d ~ f)發現,菱形編隊飛行保持時間在74s,隊形保持期間各無人機的飛行綜合誤差均小于等于3m;由圖6(g ~ i)發現,橫形編隊飛行保持時間在90s,隊形保持期間各無人機的飛行綜合誤差均小于等于4.5m。由此可知,在不同編隊隊形保持下,各無人機的綜合誤差曲線均小于等于5m,說明通過算法驗證能夠實現無人機編隊控制的穩定性以及無人機編隊成員狀態的一致性。
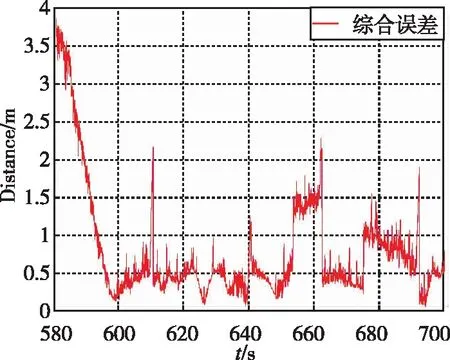
(a) 楔隊隊形中6002號機飛行綜合誤差
(b) 楔隊隊形中6003號機飛行綜合誤差
(c) 楔隊隊形中6004號機飛行綜合誤差
(d) 菱隊隊形中6002號機飛行綜合誤差
(e) 菱隊隊形中6003號機飛行綜合誤差
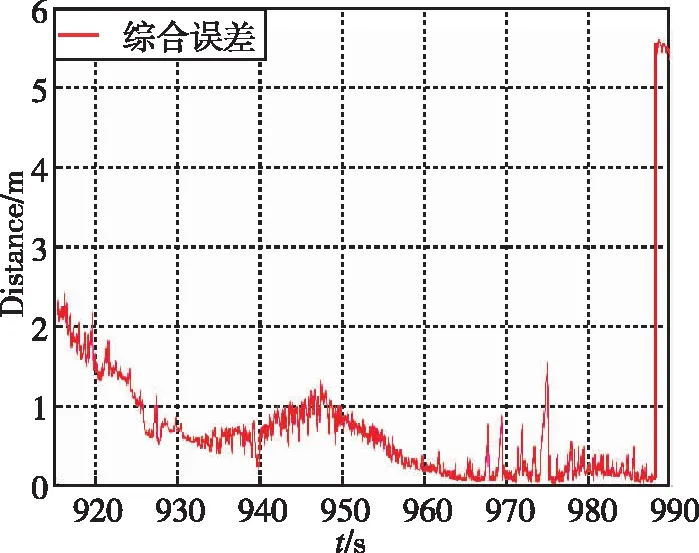
(f) 菱隊隊形中6004號機飛行綜合誤差
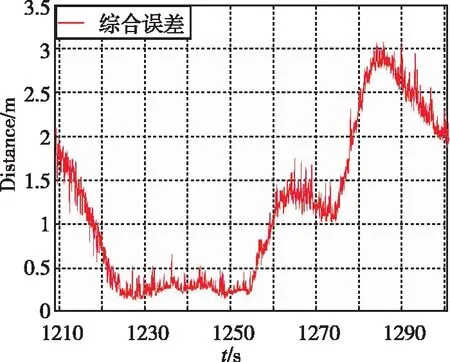
(g) 橫隊隊形中6002號機飛行綜合誤差

(h) 橫隊隊形中6003號機飛行綜合誤差
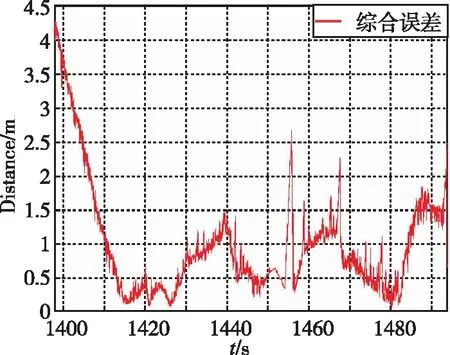
(i)橫隊隊形中6004號機飛行綜合誤差圖6 不同編隊飛機飛行時的導航誤差曲線Fig.6 Navigation error curves of aircraft in different formations
同時,對比圖6中各編隊隊形下不同無人機的綜合誤差曲線可知,在不同編隊飛行情況下,各無人機的飛行誤差均在設計的算法指標內,可實現算法對于不同編隊飛行條件下的功能要求。所以,由上述數據分析表明,它機試飛驗證方法可以達到對于自主協同控制算法的有效驗證。
4 結論
針對智能空戰環境,本文提出了一種高適用性的它機協同試飛驗證方法,并用四機協同編隊算法進行了驗證,運行結果表明:
1)系統完整度高,可實現從地面站指揮系統、無人機到戰場態勢的完整展現。
2)系統運行穩定可靠,能夠和仿真系統形成閉環,提升算法開發迭代的速度與效率,加速算法成熟。
3)系統架構開放性更好,自包含的算法模塊設計,使模塊間實現了完全解耦,可以方便地進行模塊替換,對不同算法的驗證效率有明顯提升。
它機試飛驗證方法因其迭代速度快、安全性高、穩定性高、成本低等特點,可用作中間階段算法的提前試飛驗證,為算法的開發迭代提供有效經驗。但面向空戰環境下不同集群協同控制任務的提出,下一步工作將進一步擴大驗證系統的驗證范圍,解決在平臺設計中針對更多復雜環境下的協同編隊控制試驗研究,為驗證無人機自主與協同關鍵技術提供有力支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17