相控陣雷達探通一體化關鍵技術研究
2022-10-10 08:13:18邢文革周傳睿
系統工程與電子技術 2022年10期
邢文革,周傳睿,周 程
(1.東南大學信息科學與工程學院,江蘇 南京 210096;2.南京電子技術研究所,江蘇 南京 210039)
0 引 言
相控陣雷達在先進軍事裝備上的大量運用為射頻資源的一體化應用創造了條件。美國將探通一體化作為雷達等裝備的優先發展方向,如F22的APG77雷達已可實現探通一體工作,還有SPY-6雷達也進行了相關技術研究。國內起步相對較晚,相關科研院所和高校對于相控陣雷達的探通一體技術也進行了深入研究,集中在波形設計及處理、探通架構體系研究等方面,也在試驗室條件下開展了工程樣機研究,但大多數成果對裝備建設參考意義有限。此外,我國雖進行了相關能力演示,但典型的時分復用探通工作機制導致通信能力受限,資源利用率不高,傳統的雷達射頻前端難以支撐高階通信方式。因此,探通一體工程研究亟需豐富探通工作機制、對資源調度和射頻前端設計等技術進一步開展研究。
1 工程框架設計
基于現有的雷達結構,本文提出了一種探測通信一體化的處理架構。通信專用設備為網絡管理和調制解調,前者負責通信業務數據的處理,后者完成上下行通信數據的調制和解調。
目前已發表的研究成果中,絕大部分關于探通一體的工作機制可以分為4種,分別是時分復用、頻分復用、空分復用以及特殊波形。其中,時分復用即雷達和通信分別在獨立的時間段里實現各自的功能,此類工作機制易于實現,運用廣泛,研究成果較多。頻分復用為雷達和通信分別在不同的頻域進行各自射頻信號的生成,兩者疊加之后同時收發。國內外學者對于多載波工作和頻帶間隙工作等方式進行了相關研究。空分復用是指利用數字相控陣雷達的多波束能力,在不同的波束方向分別實現探測和通信功能。國內外學者對于主副瓣復用,多波束復用等方向開展了研究。特殊波形是指采用綜合化波形實現目標探測和數據傳輸功能,此種方式局限性較高,離工程應用尚有距離。
為了更好地在現有雷達架構下實現探測通信結合,本文提出了一種“時分復用為主,頻分復用和空分復用為輔”的工作機制。
2 關鍵性工程設計
結合相控陣雷達的基礎架構和探通工作機制,首先要梳理探通一體化工程設計實現中的一些重點和難點。圖1為本文所提探通一體化處理架構示意圖,其中,通信專用部分(網管和調制解調)在通信設備中運用廣泛,實現成熟;雷達的處理、控制、波形及波束形成部分與探測通信要求一致,無需特別設計;而發射 接收(transmit/receive,T/R)組件和后端資源調度若要實現探通一體化工作,則需要考慮到探測和通信兩方面的需求進行新的設計,這是工程實現的重難點。
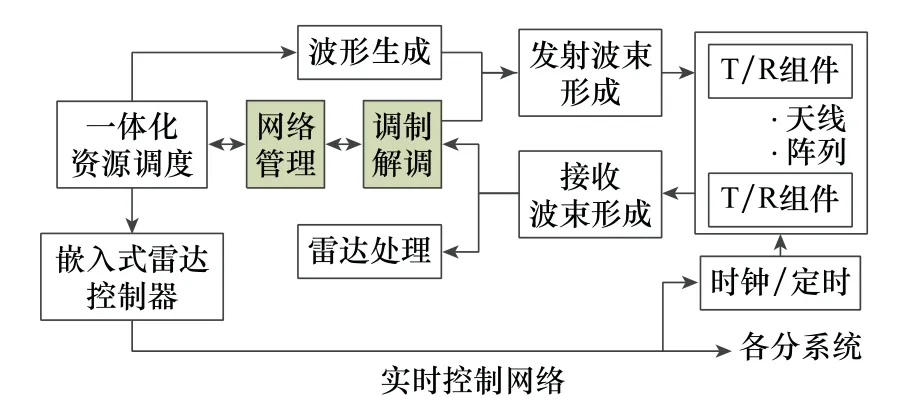
圖1 探通一體實現功能框圖Fig.1 Detection and communication integration implementation function diagram
對于資源調度,相控陣雷達需設計統一的資源調度,以保證探測和通信的協調工作,由于通信的強時序性要求,該資源調度模塊還需要考慮到全局的通信需求,需要在調度成功率和資源利用率兩方面達到預計指標。
對于T/R組件,探測通信需求有所異同,關鍵性需求也有所區別,具體列舉如表1所示。分析可得,T/R組件需要在保證帶內高平坦度和大帶寬工作的前提下兼顧探測所需的飽和發射通信所需的線性發射。面對此問題,需要重點設計T/R的發射鏈路與接收鏈路。
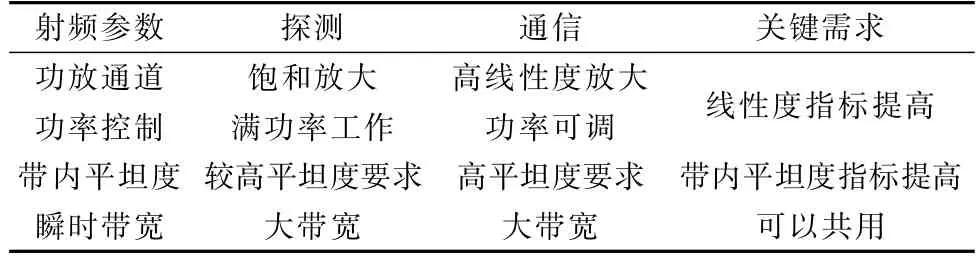
表1 探通一體對T/R組件需求比較Table 1 Comparison of T/R modulation requirements of detection and communication integration
2.1 一體化資源調度設計
2.1.1 一體化資源調度設計概述
目前經典的相控陣資源調度思想是時間窗和雙門限調度。在此基礎上,有研究人員結合各種優化思想做出了研究,但對于探通一體相控陣雷達所需的通信(強同步任務)和探測(單平臺任務)一體化調度的研究很少。在本工程設計中,針對多平臺之間任務的全局調度問題,考慮到通信收發雙方時隙嚴格對準的需求,本文設計了一種基于異步雙時間指針的探通同時多任務資源調度算法。
探通一體的資源調度首先需要與“時分為主,頻分和空分為輔”的工作機制相匹配,其次調度設計需要考慮如下3項原則。
(1)優先級原則,即有限的資源優先分給高優先級任務。典型的任務優先級排序為目標跟蹤>多站通信>有源搜索>無源搜索>自檢工作。
(2)時間利用原則,即

式中:SI為當前調度時間間隔總長度;為當前調度間隔內調度成功的任務個數;dwell T 為任務駐留時間長度。時間利用原則要求在一個調度間隔內盡可能地安排更多的任務,使得其空閑時間盡可能少,提高系統時間資源利用率。
(3)期望時間原則:

式中:exp T 為任務期望執行時刻;excu T 為任務實際執行時刻。期望時間原則要求每個任務請求的實際執行時刻盡可能靠近其期望執行時刻。建立系統任務模型:={taskID,Tasktype,pri,exp T,dwell T,win T,excu T},模 型中各參數的含義如表2所示。
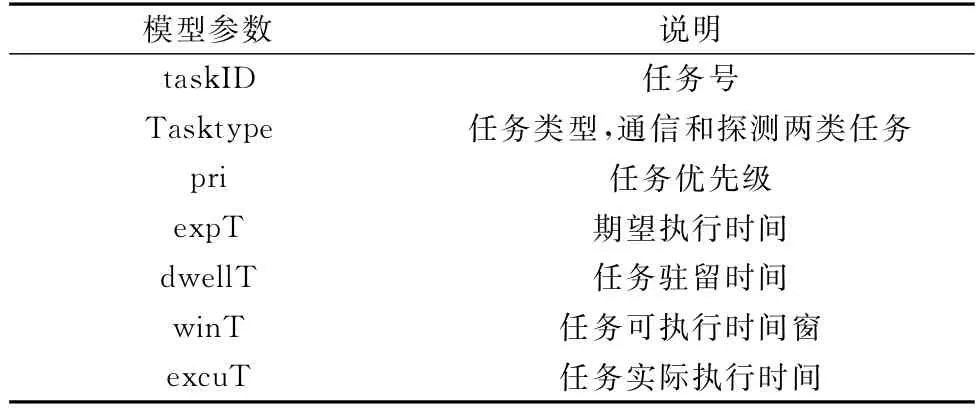
表2 模型參數Table 2 Model parameter
其中,excu T∈[exp T-win T,exp T+win T],exp Twin T為最早可執行時間;exp T+win T為最晚可執行時間或截止時間。
還需定義單個任務收益模型,記為(),定義如下:

式中:pri表示優先級貢獻的調度收益;等號右側第二項表明時間緊迫性貢獻的調度收益。
建立任務模型和調度收益模型之后,構建該算法流程。定義兩類時間指針:全局通信時間指針和異步獨立時間指針。全局通信時間指向當前的分析時刻,按照調度收益選擇適宜執行任務。在此基礎上,各平臺獨立擁有一個異步獨立時間指針,從單站任務中,按照調度收益選擇與通信任務不沖突的單站任務。本算法通過調度成功率和資源利用率評價算法性能,并迭代優化至后續調度周期。
2.1.2 一體化資源調度設計試驗驗證
測試場景:構建兩平臺通信、探測的算法驗證場景,在每一個調度周期內,首先固定產生一個通信任務,完成平臺間必要信息的共享,然后隨機產生2~3個通信任務,通信任務的駐留時間在2~10 ms內隨機生成。同時,各節點隨機生成單雷達任務,優先級和駐留時間均隨機生成。
測試結果:調度仿真結果如圖2所示,橫軸代表統計時間,縱軸代表任務優先級。通信傳輸任務優先度最高,用紅色矩形標出。藍色矩形代表了其他探測任務。從結果看,雙站之間的通信任務保持了嚴格同步,其他探測任務由各自平臺獨立調度完成。整體平均時間資源利用率達到98%以上,資源利用性能良好。
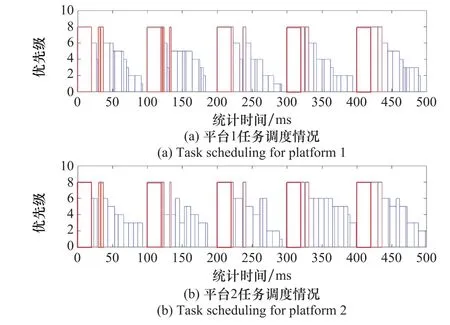
圖2 任務調度情況Fig.2 Task scheduling
圖3中,縱軸是調度成功率,對于通信任務,調度成功率為100%,高優先度任務的調度成功率大于等于99%。從試驗結果看,探測和通信一體化調度成功率高,資源調度排布合理。
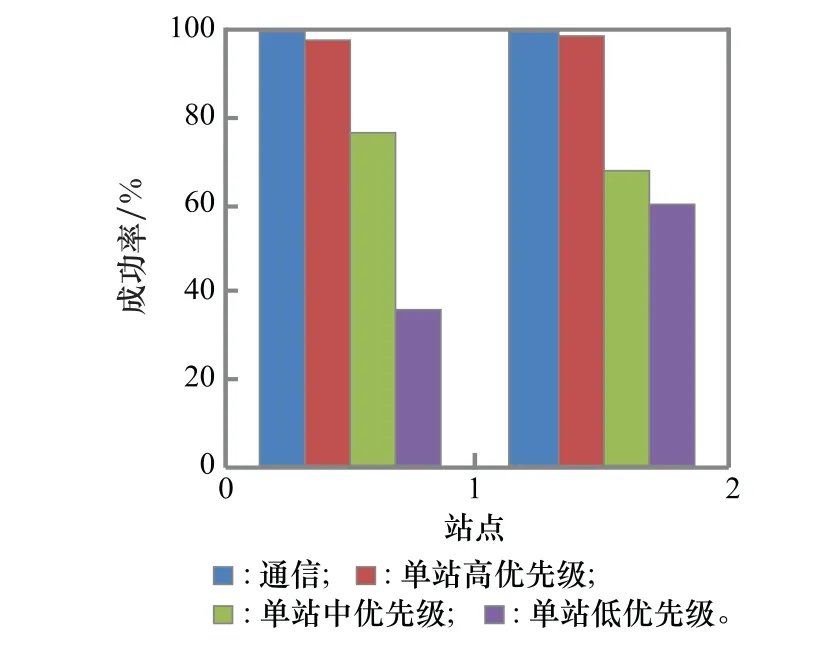
圖3 不同類型任務調度成功率Fig.3 Success rate of different types of task scheduling
2.2 一體化T/R前端設計
2.2.1 一體化T/R前端工程設計原理
在發射時,面對兼顧探測所需的飽和放大和通信所需的線性放大的需求,典型解決方案是“飽和工作線性回退”。傳統的線性功率放大器效率低,典型值為20%,且在功率回退處的效率更低。為了實現更高的效率,可使用開關型功率放大器并結合線性化技術。常用的線性化技術有前/后反饋、預失真、包絡消除和恢復等。除此之外,還可以專門設計有飽和收發通道和線性收發通道兩個工作支路,飽和通道用于雷達工作,而增益較小的線性通道用于雷達通信。
一體化T/R前端設計以直接數字頻率合成(direct digital frequency synthesis,DDS)式組件為例,如圖4所示。在探測發射時,切換到飽和發射路,激勵信號經過多級功率放大器進行飽和放大,最終輸出;通信發射時,使用線性支路,無需經過多級功率放大,在發射驅放后直接由環形器輸出,同時配合前述的線性化技術實現T/R組件的線性工作。在接收時,限幅低噪放環節考慮探測和通信時動態需求的不同,設計有“高增益低噪聲”和“大動態低增益”兩種工作模式,對探測和通信接收分別處理。
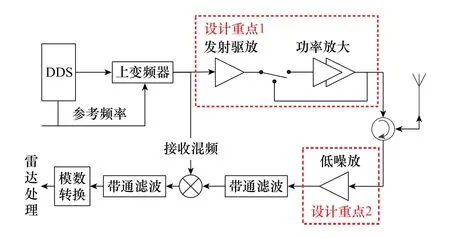
圖4 一體化T/R前端設計原理(以DDS式組件為例)Fig.4 Design principle of integrated T/R front end(taking DDS type component as an example)
2.2.2 一體化T/R前端試驗驗證
首先對帶內平坦度和工作線性度進行驗證,使用T/R組件和測試儀器搭建測試場景,如圖5所示。
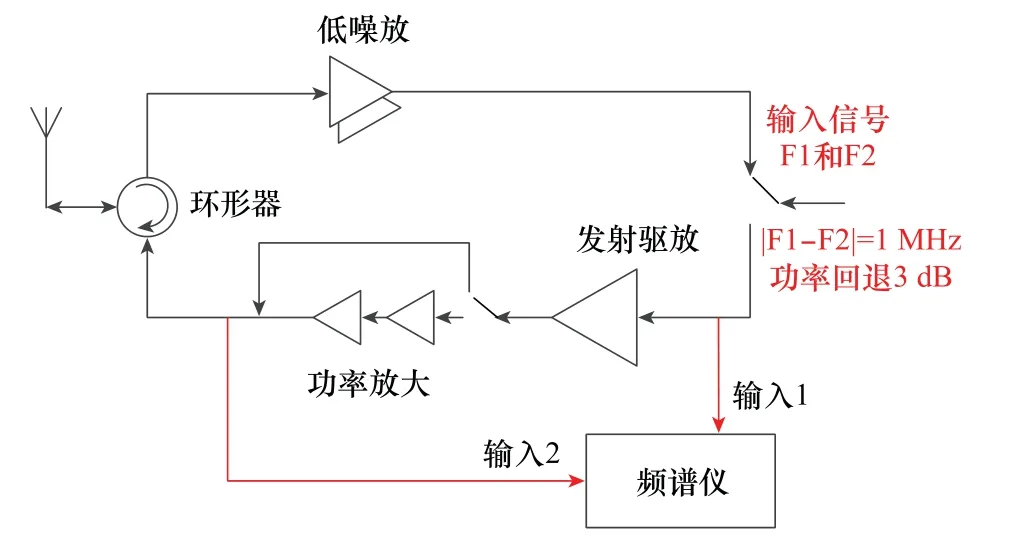
圖5 T/R前端平坦度和線性度測試場景Fig.5 Flatness and linearity test scenarios of T/R front end
帶內平坦度測試方法:將射頻通道的激勵輸入、發射驅放輸出和功率放大輸出引出,接到頻譜儀中進行測量,記錄數據并分析結果。
指標描述:使用帶內增益起伏Δ描述,為在設計通帶內最大增益和最小增益之差:Δ=-。
工作線性度測試方法:將功率回退3 d B間隔的1 M Hz的雙音信號使用功率合成器合成為滿功率信號輸入T/R組件,將功率放大輸出接至頻譜儀測量。
指標描述:使用三階互調分量(third-order intermodulation,IMD3)和基頻分量之差描述。
測試結果如下。
(1)帶內平坦度
圖6是一次測試中單通道通帶內射頻功放的帶內增益曲線,增益幅度起伏控制在0.8 d B內。統計多通道測試數據,最終的帶內增益幅度起伏小于等于1 dB。
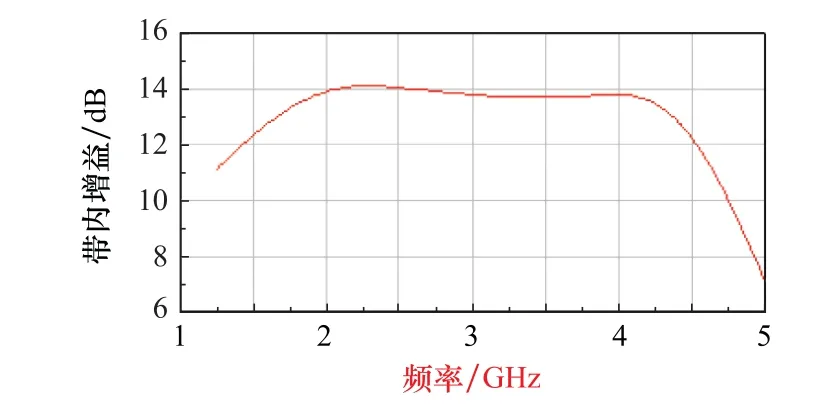
圖6 射頻功放的帶內增益曲線Fig.6 Inband gain curve of radio frequency power amplifier
(2)工作線性度
測試得到三階互調小于等于-25 dBc。從試驗結果看,T/R組件的關鍵性指標滿足探測通信工作的要求。然后對探通工作進行驗證。
測試場景:測試T/R前端在探測和通信兩種工作模式下的輸出信號,驗證能否正常工作,關鍵指標是否符合要求。
測試結果:實測結果如圖7所示,圖7(a)和圖7(c)分別為探測工作測試的頻譜圖和時域圖,圖7(b)和圖7(d)分別為通信工作測試的頻譜圖和時域圖。在探測模式下,T/R前端能夠實現窄帶寬脈沖式工作,增益滿足要求。在通信模式下,T/R前端能夠實現大帶寬,近連續波工作(依幀調度的連續波),波形相關指標符合要求。整體測試結果表明,該T/R前端設計能夠滿足探測通信一體化工作。
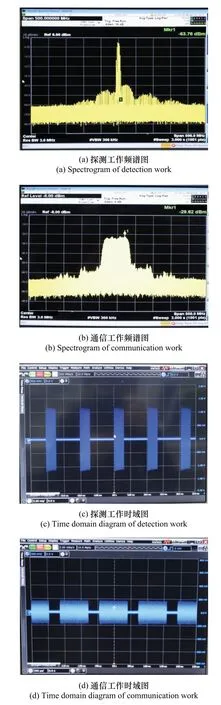
圖7 探通一體工作實測圖Fig.7 Detection and communication integration work measurement
3 探通一體工作整體性能驗證
3.1 試驗場景
采用兩部探通一體的數字相控陣雷達構建探測和通信場景,驗證探通一體的工程設計,如圖8所示。場景中,兩部雷達通信一體化設備部署于視距內,對空中目標獨立進行探測;與此同時,利用相控陣陣面建立通信鏈路,傳輸探測等信息。
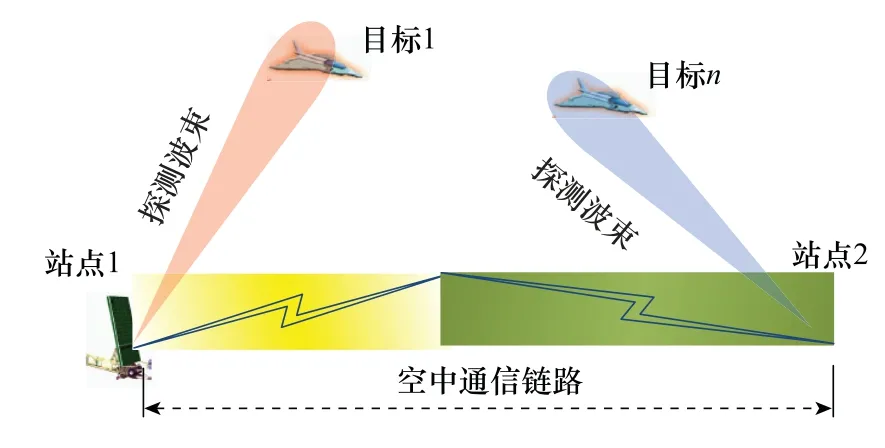
圖8 試驗驗證場景Fig.8 Experiment verification scenario
3.2 試驗結果
試驗期間,通信的傳輸瞬時速率達到了百兆比特量級,誤碼率在10以下,部分試驗結果如表3所示。通過對接收信號的信噪比進行分析,通信性能如圖9所示,和理論性能相比損失2.5 d B。
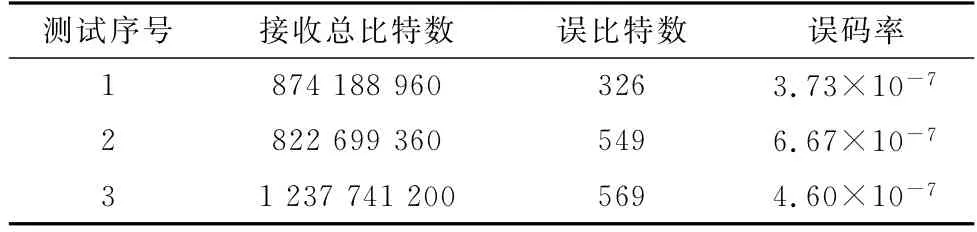
表3 誤碼率Table 3 Bit error rate
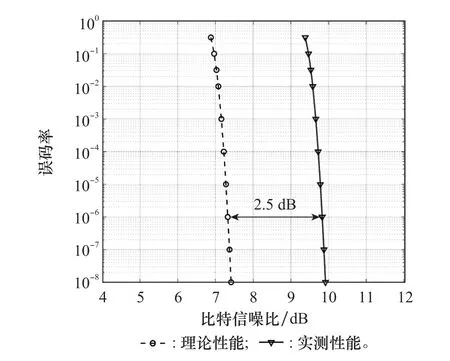
圖9 系統通信性能曲線Fig.9 System communication performance curve
試驗期間,兩節點目標探測的統計結果如表4所示。兩節點雷達搜索、跟蹤數據率均和單雷達探測性能一致,探測任務順利完成。
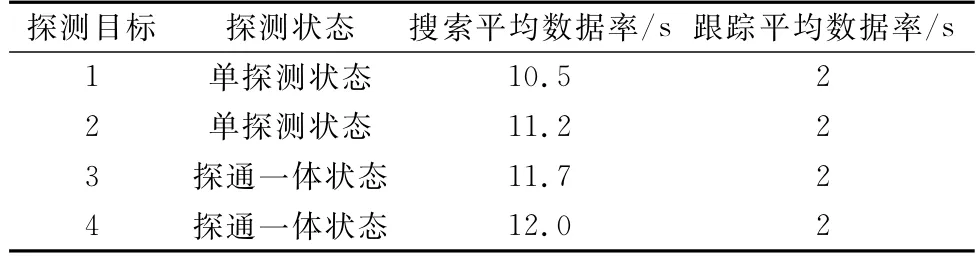
表4 探測性能Table 4 Detection performance
在試驗過程中,兩站點數字相控陣雷達實現了一體化的探測和通信,期間在保證探測能力的前提下實現了高通信效率傳輸。
4 結束語
本文利用數字相控陣雷達的波束控制敏捷、時頻資源豐富、調度處理強大的優勢,提出了一種“時分復用為主,頻分復用和空分復用為輔”的工作機制,設計并完成了射頻綜合工程設計,實現了數字相控陣雷達探通一體工作,實測結果顯示,該設計能滿足探通一體化工作的相關要求。未來隨著相控陣雷達新技術的不斷運用,可進一步擴展雷達的通信能力,為網絡化作戰提供靈活柔性的鏈接手段;同時可加強探通一體雷達的作戰應用研究,豐富網絡化雷達作戰理論。
猜你喜歡
江蘇安全生產(2023年1期)2023-02-08 05:58:38
吉林廣播電視大學學報(2021年4期)2022-01-14 02:35:48
現代裝飾(2020年7期)2020-07-27 01:27:42
作文成功之路·小學版(2020年5期)2020-06-11 12:48:26
流行色(2020年1期)2020-04-28 11:16:38
小天使·一年級語數英綜合(2018年11期)2018-11-23 09:47:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
資源再生(2017年3期)2017-06-01 12:20:59
