BDS-3 精密單點定位在鐵路勘測中的應(yīng)用研究
2022-10-10 02:03:46王國祥鄭子天潘佩芬
鐵路計算機應(yīng)用 2022年9期
朱 昀,馮 威,王國祥,鄭子天,潘佩芬
(1.西南交通大學(xué) 地球科學(xué)與環(huán)境工程學(xué)院,成都 611756;2.中鐵二院工程集團有限責(zé)任公司 測繪工程設(shè)計研究院,成都 610031;3.中國鐵道科學(xué)研究院集團有限公司 電子計算技術(shù)研究所,北京 100081)
全球衛(wèi)星導(dǎo)航系統(tǒng)(GNSS,Global Navigation Satellite System)具有高精度、全天候和高效率等技術(shù)特點,已成為鐵路建設(shè)中的重要技術(shù)手段[1-2]。其中,基于載波相位觀測值的實時動態(tài)差分定位技術(shù)(RTK,Real-Time Kinematic)及相對定位技術(shù)在鐵路建設(shè)中均得到了廣泛應(yīng)用[3]。RTK 和相對定位技術(shù)需要多臺GNSS 接收機同步工作,在一些偏遠地區(qū)或地形復(fù)雜艱險的山區(qū),其應(yīng)用會受到一定限制。經(jīng)過20 余年發(fā)展起來的精密單點定位(PPP,Precise Point Positioning)技術(shù)采用單臺GNSS 接收機,無需架設(shè)基站,即可靈活、高效地實現(xiàn)全球范圍內(nèi)的高精度定位[4-5],該技術(shù)的出現(xiàn)為鐵路勘測提供了一種新的選擇。
北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS,BeiDou Navigation Satellite System)是我國自主建設(shè)運行的全球衛(wèi)星導(dǎo)航系統(tǒng)。第三代北斗衛(wèi)星導(dǎo)航系統(tǒng)(BDS-3)于2020年7 月31 日正式建成開通,并向全球用戶提供導(dǎo)航定位服務(wù),BDS-3 由3 顆地球靜止軌道(GEO)衛(wèi)星、3 顆傾斜地球同步軌道(IGSO)衛(wèi)星和24 顆中圓地球軌道(MEO)衛(wèi)星組成[6-7],提供B1I、B3I、B1C、B2a 和B2b 共5 個頻率的信號。劉生峰等人[8]對BDS-3 共4 種雙頻組合進行PPP 靜態(tài)解算發(fā)現(xiàn),不同雙頻組合的點位精度在分米級;陳哲正等人[9]聯(lián)合BDS-2 與BDS-3 形成7 種雙頻組合并進行靜態(tài)PPP 分析,結(jié)果表明,所有組合定位精度在厘米級。當前,BDS-3 已建成開通,系統(tǒng)定位性能得到了較大提升,但對采用非差非組合觀測模型的BDS-3 的PPP 性能分析及其在鐵路勘測場景下的應(yīng)用和研究相對較少。
因此,為推動BDS-3 PPP 在鐵路勘測領(lǐng)域的應(yīng)用,本文推導(dǎo)了BDS-3 任意雙頻非差非組合PPP 函數(shù)模型,用其對BDS-3 衛(wèi)星B1I、B3I、B1C 和B2a信號形成的5 種雙頻組合進行PPP 解算和結(jié)果分析,并基于國內(nèi)某鐵路控制點觀測數(shù)據(jù)進行BDS-3 PPP解算,分析其在鐵路勘測中應(yīng)用的可行性。
1 BDS-3 雙頻非差非組合模型
相比于傳統(tǒng)雙頻消電離層PPP 模型,非差非組合模型具有估計電離層延遲參數(shù)和利于多頻多系統(tǒng)數(shù)據(jù)處理等優(yōu)勢,吸引了眾多學(xué)者對其研究。通常,偽距P和載波相位L初始觀測方程可表示為

其中,i是信號頻點;r和s分別表示接收機和衛(wèi)星;Pi和Li分別是頻點i的偽距和載波相位觀測值;ρ是衛(wèi)星與接收機之間的幾何距離;T是對流層延遲;dtr和dts分別是接收機和衛(wèi)星鐘差;Ii是頻點i的電離層延遲;λi是頻點i的載波波長;Ni是頻點i的載波整周模糊度;dr,i和ds,i分別是頻點i的接收機和衛(wèi)星端的偽距硬件延遲;br,i和bs,i分別是頻點i的接收機和衛(wèi)星端的相位硬件延遲;分別是頻點i的偽距和載波相位觀測值的未模型化誤差及觀測噪聲之和[10]。
為方便表述,定義以下表達式
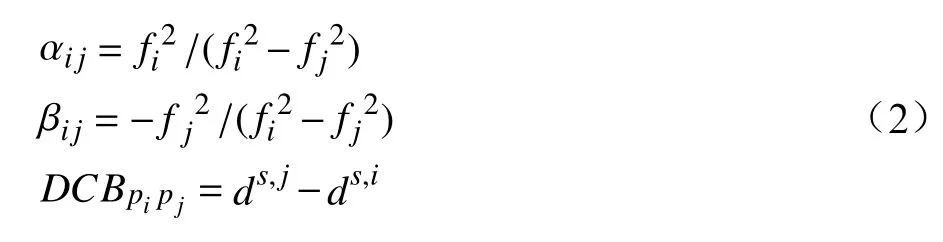
其中,fi和fj分別是頻點i和j的頻率;αij和βi j是頻率相關(guān)的放大因子表示頻點i和j的偽距硬件延遲差異(DCB,Differential Code Bias)。
目前,國際GNSS 服務(wù)中心(IGS,International GNSS Service)提供的BDS-3 精密鐘差產(chǎn)品是以B1I和B3I 頻點的消電離層組合電子相位中心為參考基準,其表達式為

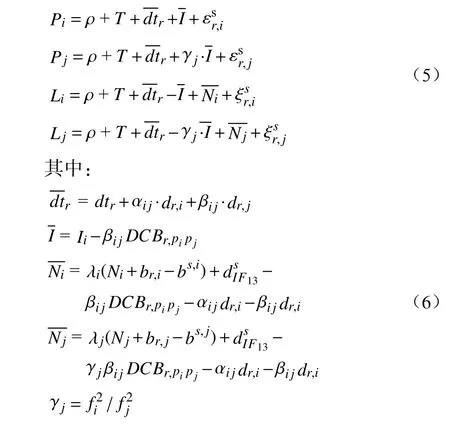
在利用BDS-3 信號進行PPP 計算時,先對各頻點上偽距觀測值進行衛(wèi)星端DCB 改正。BDS-3 的衛(wèi)星DCB 產(chǎn)品可通過中國科學(xué)院或德國宇航中心獲得。式(1)經(jīng)過精密鐘差和衛(wèi)星DCB 改正后可整理為

其中,dr,i可同時被接收機鐘差和電離層參數(shù)吸收,相位硬件延遲與模糊度具有強相關(guān)性,且通常具有極高的時間穩(wěn)定性,相位延遲可被模糊度完全吸收[11]。通過參數(shù)規(guī)整可得,利用BDS-3,任意頻點i和j的非差非組合函數(shù)模型為
2 BDS-3 PPP 結(jié)果分析
2.1 實驗數(shù)據(jù)
本文選取了12 個的IGS 多系統(tǒng)監(jiān)測站(簡稱:測站)2021 年5 月3 日—9 日共7 天的觀測數(shù)據(jù),對BDS-3 的B1I、B3I、B1C 和B2a 信號形成的B1I/B3I、B1C/B2a、B3I/B1C、B3I/B2a 和B1I/B2a 5種雙頻組合進行PPP 靜態(tài)和仿動態(tài)解算和性能分析。BDS-3 中3 顆GEO 衛(wèi)星沒有播發(fā)B1C、B2a 信號,本文只使用了BDS-3 中的3 顆IGSO 衛(wèi)星、24 顆MEO 衛(wèi)星的觀測數(shù)據(jù)。精密星歷和精密鐘差來自武漢大學(xué)分析中心,DCB 產(chǎn)品來自中國科學(xué)院,測站參考坐標來自IGS 周解文件。PPP 三維收斂時間定義為E、N、U 方向坐標偏差均小于1 dm 并至少連續(xù)保持20 個歷元所需的時間。
位置精度因子(PDOP,Position Dilution of Precision)是用來衡量觀測衛(wèi)星空間分布的幾何強度因子,衛(wèi)星空間幾何分布越好,PDOP 值越小。本文對所選12 個測站2021 年5 月3 日的觀測數(shù)據(jù)對BDS-3 的衛(wèi)星可見數(shù)和空間分布幾何強度進行分析,結(jié)果如圖1 所示。圖1 中橫軸分別列出了所選12 個測站的站名,各測站的可見衛(wèi)星數(shù)平均值均不少于8 顆,PDOP 平均值在2.0 左右;各測站BDS-3 衛(wèi)星可見數(shù)較多且具有良好的空間幾何分布。

圖1 12 個測站可見衛(wèi)星數(shù)和PDOP 值分布
2.2 靜態(tài)解算結(jié)果分析
圖2 給出了5 種雙頻組合各測站連續(xù)7 天單天靜態(tài)解算結(jié)果在E、N、U 方向的均方根誤差(RMSE,Root Mean Squared Error)平均值。表1 和圖3 給出了5 種雙頻組合下12 個測站連續(xù)7 天單天靜態(tài)解算結(jié)果的RMSE 平均值。從圖2 中可看出,在水平方向上,大多數(shù)測站在5 種雙頻組合下都能收斂到3 cm 以內(nèi);在高程方向(U 方向)上,B3I/B1C、B3I/B2a 組合的定位精度較差,其中,部分測站RMSE 大于8 cm,其余3 種組合的定位精度基本一致,均能收斂到4 cm 以內(nèi)。總體來說,B1I/B3I 模式的定位精度最高,主要因為其與生成BDS-3 精密產(chǎn)品所用信號相同;B3I/B2a 模式的定位精度最差,主要因為B3I 與B2a 信號頻率比較接近而導(dǎo)致的觀測方程病態(tài)性問題。

表1 5 種雙頻組合12 個測站靜態(tài)解平均RMSE 和收斂時間
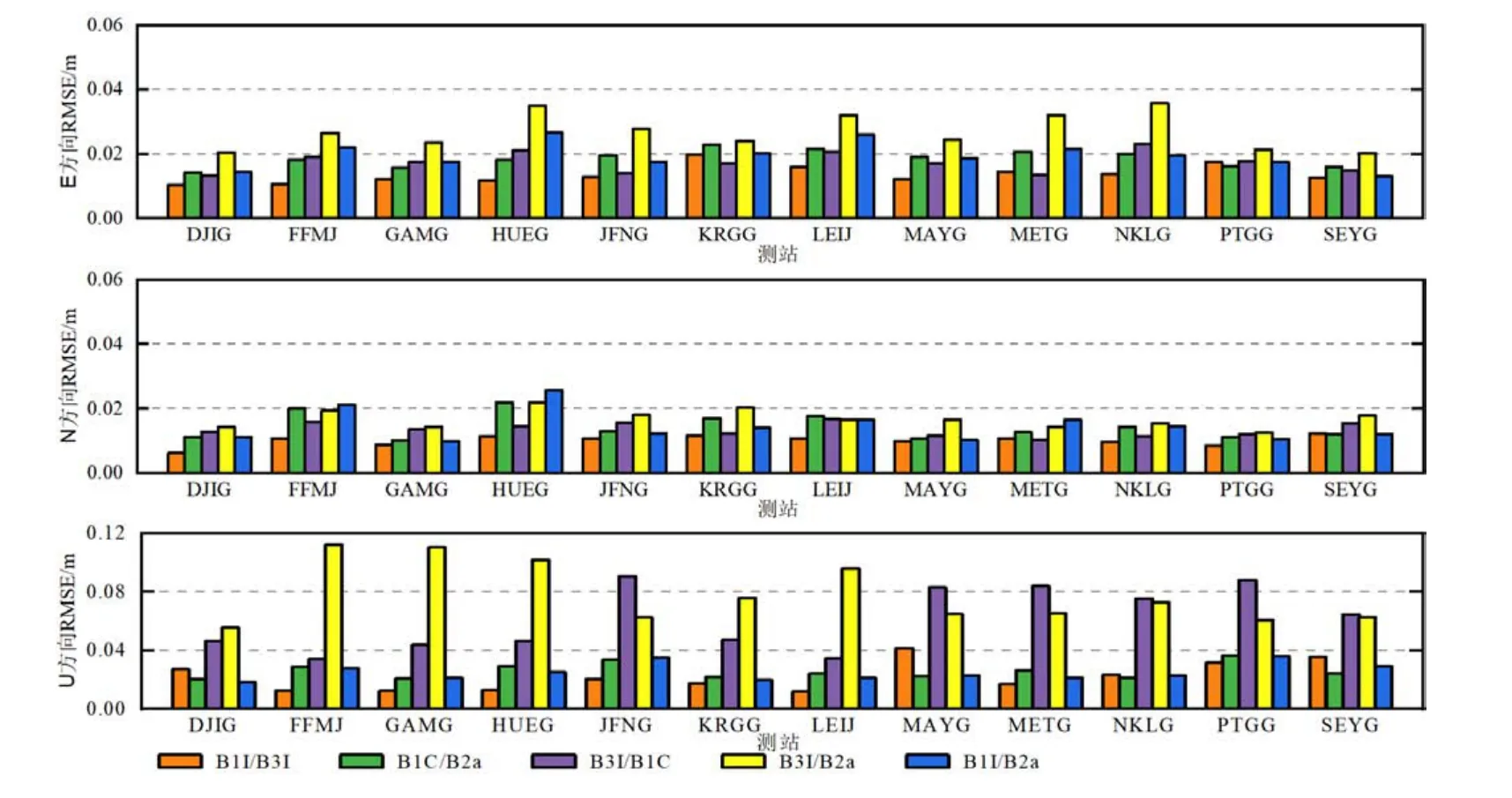
圖2 5 種雙頻組合下12 個測站單天靜態(tài)解平均RMSE
由表1 可知,在5 種雙頻組合中,B1I/B3I、B1C/B2a 和B1I/B2a 均能實現(xiàn)水平方向(E 或N 方向)優(yōu)于2 cm,高程方向優(yōu)于2.6 cm 的定位精度,收斂時間分別約為37 min、103 min 和87 min。B3I/B1C和B3I/B2a 的定位精度在水平方向分別約為2 cm 和3 cm,高程方向分別約為6.2 cm 和8.0 cm,收斂時間分別約為72 min 和205 min。除B1I/B3I 組合的收斂時間較短外,其余4 種組合的收斂時間均相對較長,其原因是非差非組合模型中未知參數(shù)相關(guān)性更高,更易受到誤差改正的影響。我國現(xiàn)行規(guī)范《數(shù)字航天攝影測量-控制測量規(guī)范》對PPP 技術(shù)用于航測像控點定位時,要求PPP 定位坐標與國家D級GNSS 點或大地控制網(wǎng)點坐標的互差在水平方向≤0.20 m,高程方向≤ 0.22 m。BDS-3 這5 種雙頻組合在水平和高程方向定位精度均優(yōu)于0.1m,滿足規(guī)范要求,均可用于鐵路航測中像控點的布設(shè)。
2.3 仿動態(tài)解算結(jié)果分析
因靜態(tài)模擬動態(tài)實驗中,測站靜態(tài)觀測數(shù)據(jù)質(zhì)量更高,其解算結(jié)果可有效反映動態(tài)PPP 的最佳性能,因此,本文采用靜態(tài)模擬動態(tài)的方法評定5 種雙頻組合動態(tài)PPP 定位性能。圖3 給出了5 種雙頻組合下各測站連續(xù)7天動態(tài)解在E、N、U 方向的RMSE平均值。表2 給出了5 種雙頻組合下12 個測站連續(xù)7 天動態(tài)解的RMSE 和收斂時間平均值。從圖3 可看出,除少數(shù)測站外,B1I/B3I、B1C/B2a、B3I/1C 和B1I/B2a 這4 種組合各站在水平方向的定位精度優(yōu)于10 cm,高程方向優(yōu)于15 cm;B3I/B2a 的定位精度最差。
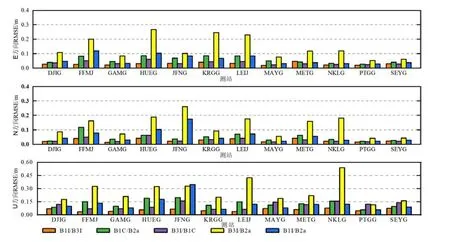
圖3 5 種雙頻組合下12 個測站動態(tài)解平均RMSE
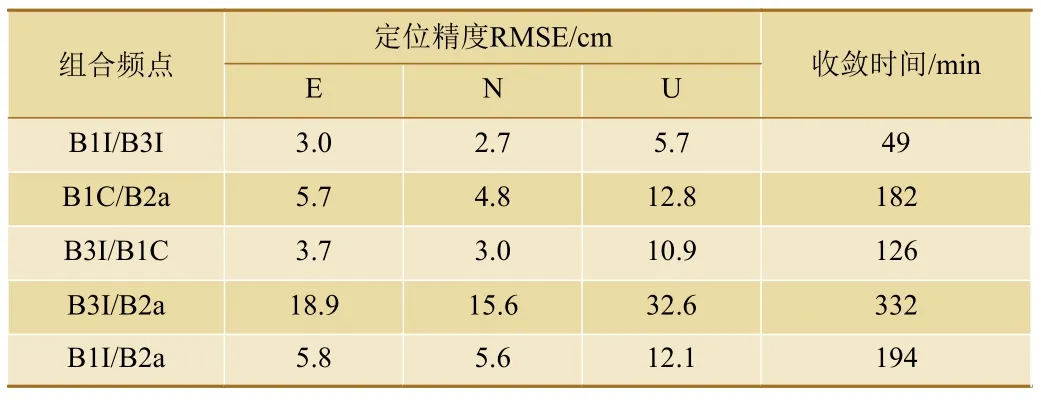
表2 5 種雙頻組合12 個測站動態(tài)解平均RMSE 和收斂時間
由表2 可知,除B3I/B2a 組合外,其余組合均能實現(xiàn)水平方向優(yōu)于6 cm,高程方向優(yōu)于15 cm 的定位精度。同靜態(tài)解算結(jié)果一樣,B1I/B3I 的定位性能最好,B3I/B2a 的定位性能最差,其主要原因與靜態(tài)定位結(jié)果一致。在鐵路勘測中采用GNGS RTK 進行地形測量時,我國現(xiàn)行《鐵路工程測量規(guī)范》要求測量點坐標與已知點坐標在水平方向互差不大于圖上0.2 mm,高程方向互差不大于1/5 基本等高距,當對規(guī)范中最大比例尺為1∶500,基本等高距為1 m的地形圖進行測量時,可知其定位坐標精度要求為水平方向≤0.1 m,高程方向≤0.2 m。綜上,BDS-3 PPP 動態(tài)定位精度滿足規(guī)范要求,為其在鐵路數(shù)字地形測量中的應(yīng)用提供了可能。
2.4 鐵路場景下實例分析
為進一步驗證在鐵路場景下BDS-3 PPP 的可用性,隨機選取國內(nèi)某鐵路中一個控制點的GNSS 靜態(tài)觀測數(shù)據(jù)進行實驗分析,觀測時長約2 h,接收機和天線類型分別為Trimble R12 和 TRMR12 NONE。采用B1I/B3I 頻率及本文推導(dǎo)的非差非組合模型進行PPP 解算。圖4 給出了該控制點BDS-3 衛(wèi)星可見數(shù)與PDOP 值。由圖4 可知,其觀測時段內(nèi)可見衛(wèi)星數(shù)約為8~12 顆,PDOP 值約為2.0,說明在真實鐵路場景下,BDS-3 可見衛(wèi)星數(shù)較多且具有良好的空間幾何分布,可用于PPP 獲取高精度位置信息。
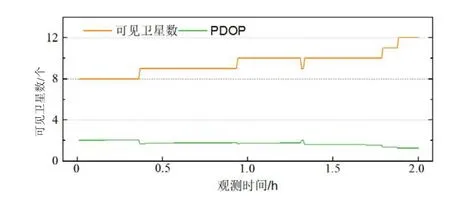
圖4 控制點衛(wèi)星可見數(shù)與PDOP 值
圖5 給出了控制點分別在靜態(tài)和仿動態(tài)模式下的定位誤差序列和不同觀測時長的定位精度,圖5中紅色虛線位置代表收斂時間。由圖5 可知,該控制點靜態(tài)和仿動態(tài)PPP 收斂時間分別約為27 min 和44 min,在收斂階段,定位精度相對較差,但在收斂后,3 個方向的定位偏差序列波動較小且均優(yōu)于10 cm;靜態(tài)和仿動態(tài)定位在觀測時長為30 min 時,各方向定位偏差均優(yōu)于20 cm,觀測時長超過1 h 后,各方向均能實現(xiàn)優(yōu)于10 cm 的定位精度。綜上,相比于傳統(tǒng)相對定位技術(shù),利用我國BDS-3 系統(tǒng)進行精密單點定位能實現(xiàn)厘米級的定位精度,且其定位精度不受測區(qū)范圍限制、單機作業(yè)更具靈活性,并具有全天候的可見衛(wèi)星數(shù)和空間幾何分布的高可用性。可見,BDS-3 PPP 技術(shù)在鐵路勘測領(lǐng)域具有較好的應(yīng)用前景。
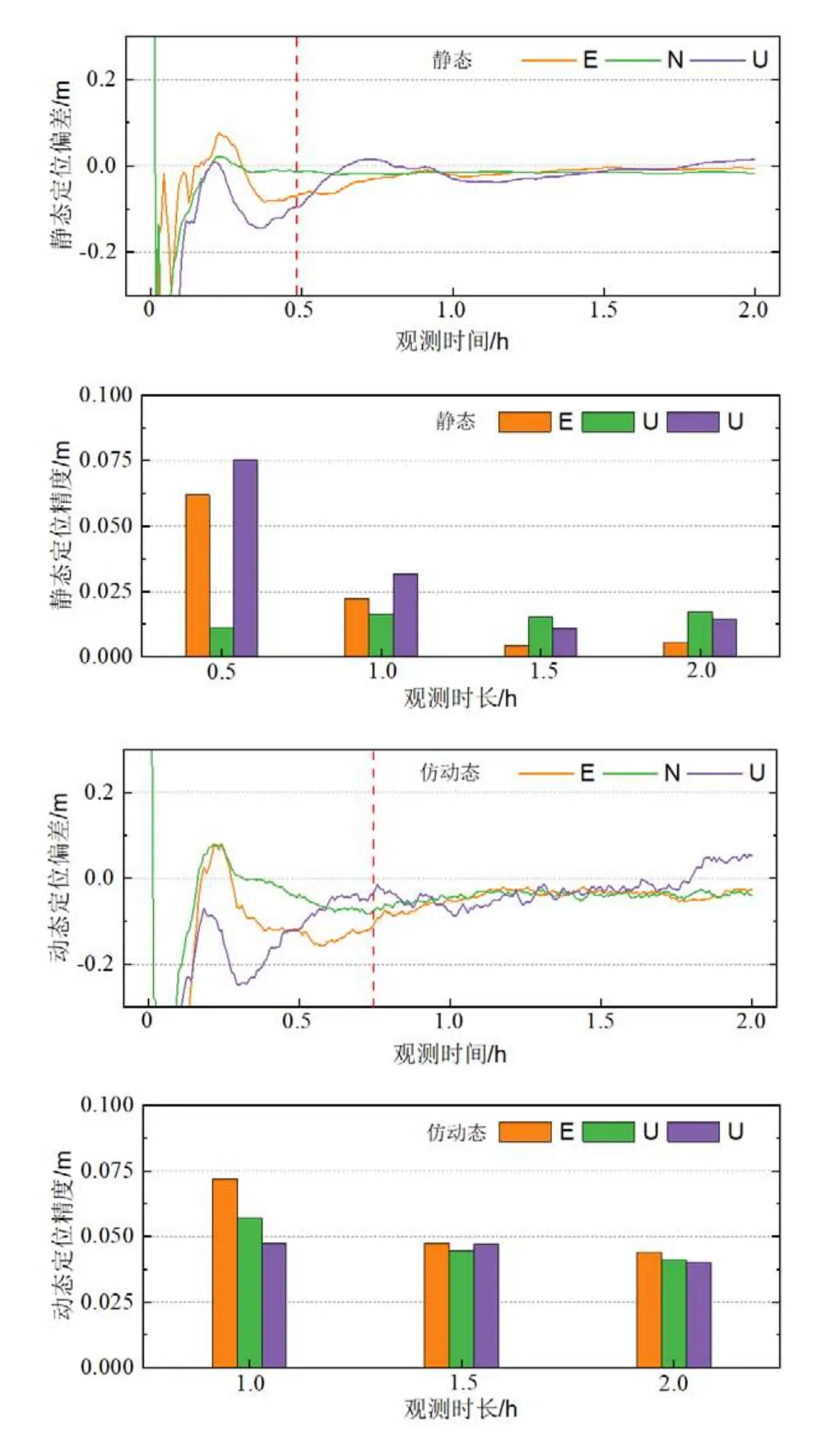
圖5 控制點靜態(tài)(左)和仿動態(tài)(右)定位偏差序列及不同觀測時長定位精度
3 結(jié)束語
隨著我國BDS-3 的建成和開通,以及全球范圍內(nèi)北斗可見衛(wèi)星數(shù)的增加,北斗在鐵路勘測中的應(yīng)用也越來越廣泛。本文針對BDS-3,分別從衛(wèi)星可見數(shù)、PDOP 值及PPP 定位性能等方面研究了BDS-3 PPP 在鐵路勘測中應(yīng)用的可行性。結(jié)果表明,在觀測時段內(nèi)可見衛(wèi)星數(shù)均相對較多且具有良好的空間幾何分布,為北斗衛(wèi)星高精度定位提供良好的觀測條件;無論是PPP 靜態(tài)還是仿動態(tài)解算,均可實現(xiàn)在水平和高程方向的厘米級定位精度,當其應(yīng)用于鐵路勘測中航測像控點的布設(shè)或數(shù)字地形圖的測量時,均滿足我國相關(guān)現(xiàn)行規(guī)范精度要求。基于BDS-3 的精密單點定位技術(shù)將為衛(wèi)星導(dǎo)航定位系統(tǒng)在鐵路勘測中的應(yīng)用提供一種新的選擇。
猜你喜歡
天天愛科學(xué)·科學(xué)啟蒙(2025年3期)2025-03-27 00:00:00
計算機應(yīng)用(2022年2期)2022-03-01 12:33:42
計算機應(yīng)用(2022年1期)2022-02-26 06:57:42
計算機應(yīng)用(2021年4期)2021-04-20 14:06:36
計算機應(yīng)用(2021年3期)2021-03-18 13:44:48
云南畫報(2021年12期)2021-03-08 00:50:54
計算機應(yīng)用(2021年1期)2021-01-21 03:22:38
鐵道通信信號(2018年7期)2018-08-29 01:17:04
通信電源技術(shù)(2016年4期)2016-04-04 02:58:04
工程建設(shè)與設(shè)計(2016年3期)2016-02-27 10:50:46