聯(lián)合戰(zhàn)場導航對抗仿真評估系統(tǒng)設計與實現(xiàn)
2022-10-10 08:14:02謝曉偉趙國強
系統(tǒng)工程與電子技術 2022年10期
張 偉,何 晶,謝曉偉,趙國強,陳 真
(1.空軍工程大學信息與導航學院,陜西 西安 710077;2.中國人民解放軍93303部隊,遼寧 沈陽 110043;3.中國人民解放軍94198部隊,新疆 哈密 839101)
0 引 言
未來聯(lián)合作戰(zhàn)不再是單一戰(zhàn)場的較量,而是在多維空間展開的綜合實力對抗,信息化技術在現(xiàn)代化戰(zhàn)爭中得到了不斷發(fā)展與應用,未來聯(lián)合作戰(zhàn)中其應用會越來越廣泛。在導航衛(wèi)星支持下的遠程巡邏、高維偵察、高速機動、精確打擊都是現(xiàn)代戰(zhàn)爭的鮮明特點,因此開展聯(lián)合戰(zhàn)場環(huán)境下針對衛(wèi)星導航的干擾和抗干擾技戰(zhàn)術研究,有著重要的理論和現(xiàn)實意義[1]。
電磁領域實兵對抗演練,需要耗費大量的人力、物力、財力,且我國周邊的外軍軍事基地眾多,嚴密的電磁偵察活動導致保密性差,同時,我國周邊的國際貿易往來密切,民商航空、船舶繁忙,實兵演練對于社會經濟發(fā)展有一定的矛盾和沖突。但是信息化聯(lián)合作戰(zhàn)戰(zhàn)場是海、陸、空、天、電、網等跨域協(xié)同、多域聯(lián)動的聯(lián)合戰(zhàn)場,通過軟件仿真技術,不斷融合各種約束因素,對真實戰(zhàn)場的電磁態(tài)勢和自然環(huán)境變化進行仿真,將敵偵查、巡邏、常規(guī)火力武器等平臺進行建模入庫,可在很大程度上節(jié)省人力、物力、財力等戰(zhàn)備資源,用現(xiàn)代化的手段指導保障軍事備戰(zhàn)訓練,這也是美軍將作戰(zhàn)推演與仿真系統(tǒng)廣泛應用于軍事訓練演習、作戰(zhàn)分析研究、武器裝備采辦等領域的重要原因[2-4]。因此,推動聯(lián)合戰(zhàn)場導航信息對抗仿真評估系統(tǒng)的開發(fā)與試驗,不斷完善導航信息保障任務統(tǒng)籌、導航干擾兵力配置部署等戰(zhàn)法戰(zhàn)術,通過建立數(shù)據(jù)特征的直觀表達,將對抗效果進行可視化呈現(xiàn),更好服務指揮與保障的輔助決策,是導航對抗理論向實戰(zhàn)化演進很好的嘗試和探索[5-8]。
1 系統(tǒng)總體方案
聯(lián)合戰(zhàn)場導航對抗仿真評估系統(tǒng)(以下簡稱“仿真評估系統(tǒng)”)用于聯(lián)合戰(zhàn)場導航信息對抗的作戰(zhàn)行動預演、方案研討和戰(zhàn)術優(yōu)化,以及指揮人員作戰(zhàn)指揮過程訓練。根據(jù)系統(tǒng)需求分析、系統(tǒng)設計思路、系統(tǒng)工作框架來描述系統(tǒng)總體方案,并由此形成系統(tǒng)功能設計,系統(tǒng)研究內容采用模塊化設計,便于系統(tǒng)模型修正和升級,細化工作流程設計,對當前主要干擾技術和抗干擾技術進行建模,運用高級電磁傳播模型(advanced propagation model,APM)模擬真實電磁波傳播環(huán)境,通過仿真推演測試驗證系統(tǒng)任務模擬有效性、評估結果可用性,為后期聯(lián)合戰(zhàn)場導航對抗任務的技戰(zhàn)術模擬分析提供可靠平臺。
1.1 系統(tǒng)功能
仿真評估系統(tǒng)提供聯(lián)合戰(zhàn)場中紅藍雙方的常用兵力載荷,其中導航干擾類型有壓制式干擾、欺騙式干擾,導航抗干擾技術有時域濾波、頻域濾波、空時濾波,對雙方的導航對抗任務想定進行仿真推演與效果評估。建立聯(lián)合戰(zhàn)場中常用固定式、車載式、機載式(無人機和有人機)、浮空實體、星基等載體平臺用于搭載干擾載荷,空中載體平臺(各型飛機、巡航導彈)用于搭載精確制導武器導航載荷。在系統(tǒng)提供的仿真驅動框架下,構建導航系統(tǒng)的觀測模型和干擾環(huán)境,對全球衛(wèi)星導航系統(tǒng)(global navigation satellite system,GNSS)制導武器平臺偵察、巡邏、打擊軌跡進行建模入庫管理,以進行作戰(zhàn)任務想定仿真并提供任務過程的軌跡編輯、演示、調整功能;干擾方通過研判,對干擾源進行配備、部署,系統(tǒng)根據(jù)干擾源的干擾樣式、干擾頻率、功率等參數(shù),仿真計算干擾源覆蓋區(qū)域內干擾信號的功率,能夠對仿真數(shù)據(jù)和導航響應模型的定位數(shù)據(jù)進行定位誤差評估,實現(xiàn)任務場景環(huán)境的裝備導航性能及作戰(zhàn)效能評估。系統(tǒng)可對GNSS制導武器平臺的飛行運動軌跡進行2D、3D展示,并輸出信噪比、載噪比、水平誤差、干擾威力變化等可視化結果,對指揮管理人員和專業(yè)技術人員提供輔助決策支持[9-12]。
1.2 系統(tǒng)組成
仿真評估系統(tǒng)運行在Windows7旗艦版操作系統(tǒng)環(huán)境,在Visual Studio 2013開發(fā)平臺中采用C++語言編程實現(xiàn),通過VS-QT-Addin、Visual_Assist_X-2013來實現(xiàn)界面編程和提高代碼閱讀性,并且后期可以用CMake程序包實現(xiàn)便捷的軟件管理和項目配置,SVN工具實現(xiàn)代碼版本的升級管理。
按照系統(tǒng)工程思想,為了便于升級維護和程序修改,仿真評估系統(tǒng)采用模塊化設計,如圖1所示,包括仿真控制管理模塊、仿真想定編輯模塊、戰(zhàn)場環(huán)境仿真模塊、導航對抗信號/功能級仿真模塊、導航對抗評估模塊。該設計思想使模塊耦合度低,便于后期在仿真測試中對于出現(xiàn)問題模塊的判斷和修正。
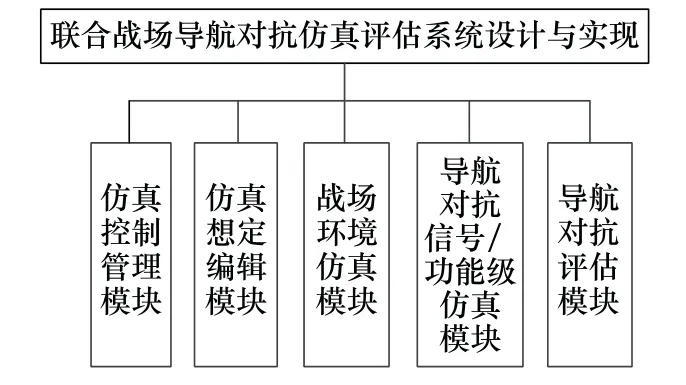
圖1 系統(tǒng)功能模塊設計Fig.1 System function module design
仿真控制管理模塊用于對仿真進程進行調度管理和隨時干預,能夠實現(xiàn)仿真的初始化、開始、暫停、結束、回放等控制功能;能夠對系統(tǒng)仿真時間進行統(tǒng)一管理,實現(xiàn)快進等功能,保證仿真系統(tǒng)時間的一致性。
仿真想定編輯模塊用于以可視化的形式制定作戰(zhàn)想定,包括紅藍雙方的任務規(guī)劃、作戰(zhàn)過程等,編輯兵力實體模型的運動軌跡,支持如直線、圓形、8字形、跑道形等典型軌跡和用戶自定義或導入軌跡,存儲在想定文件中。
戰(zhàn)場環(huán)境仿真模塊用于以數(shù)據(jù)驅動方式對導航對抗仿真過程中的所有要素進行3D呈現(xiàn),包括戰(zhàn)場地理環(huán)境、固定或機動式地面干擾源、空中干擾源、武器平臺(如巡航導彈、無人偵察機)、武器平臺的飛行軌跡、干擾源波束、特征信息、場景切換等功能。
導航對抗信號/功能級仿真模塊用于利用第三方提供的導航響應模型(DLL庫),構建衛(wèi)星導航接收裝備的數(shù)字化模型,并進行信號級及功能級仿真。根據(jù)目標兵力平臺位置,獲取當前衛(wèi)星星座信息,計算導航信號功率,并根據(jù)干擾信號功率計算干信比,輸出兵力位置信息、定位信息、干信比等相關信息,用于定位誤差信息計算。
導航對抗評估模塊用于對仿真數(shù)據(jù)和導航響應模型的定位數(shù)據(jù)進行定位誤差評估,實現(xiàn)導航對抗任務場景下裝備導航性能及干擾作戰(zhàn)效能評估。
1.3 系統(tǒng)工作流程
根據(jù)對研究功能的刻畫和描述,結合不同作戰(zhàn)樣式創(chuàng)建導航對抗任務想定,通過載荷添加、兵力增加、兵力屬性、任務規(guī)劃的給定,完成干擾裝備和導航裝備的屬性、狀態(tài)、任務、軌跡編輯。
屬性編輯與狀態(tài)編輯中,分別對導航裝備參數(shù)(實體類型、位置、速度、作戰(zhàn)半徑、攻擊范圍等)、干擾裝備參數(shù)(頻率范圍、視場范圍、干擾類型、發(fā)射功率等)進行設置,并根據(jù)經驗情報參數(shù)對發(fā)射、接收天線性能參數(shù)(中心頻率、脈沖周期、帶寬、平均功率、饋線損耗、采樣率等)進行配置。任務編輯中,通過對裝備開關機時間,干擾源的地理坐標信息(經緯高)、姿態(tài)信息(俯仰、方位、橫滾)、導航鏈路配置(選星能力)、干擾鏈路配置(掃描方式、方向圖調整、極化方式等)進行部署。軌跡編輯中,通過設計GNSS制導武器平臺的起終點等關鍵節(jié)點地理坐標信息、運動軌跡類型(直線型、圓型、8字型、跑道型等)等實現(xiàn)作戰(zhàn)巡航軌跡的刻畫。
對不同作戰(zhàn)想定進行導航對抗任務仿真,根據(jù)欺騙干擾、壓制干擾的不同樣式輸出相應干擾結果并進行評估。深度結合系統(tǒng)工程和軟件工程方法,形成仿真評估系統(tǒng)工作流程,如圖2所示。
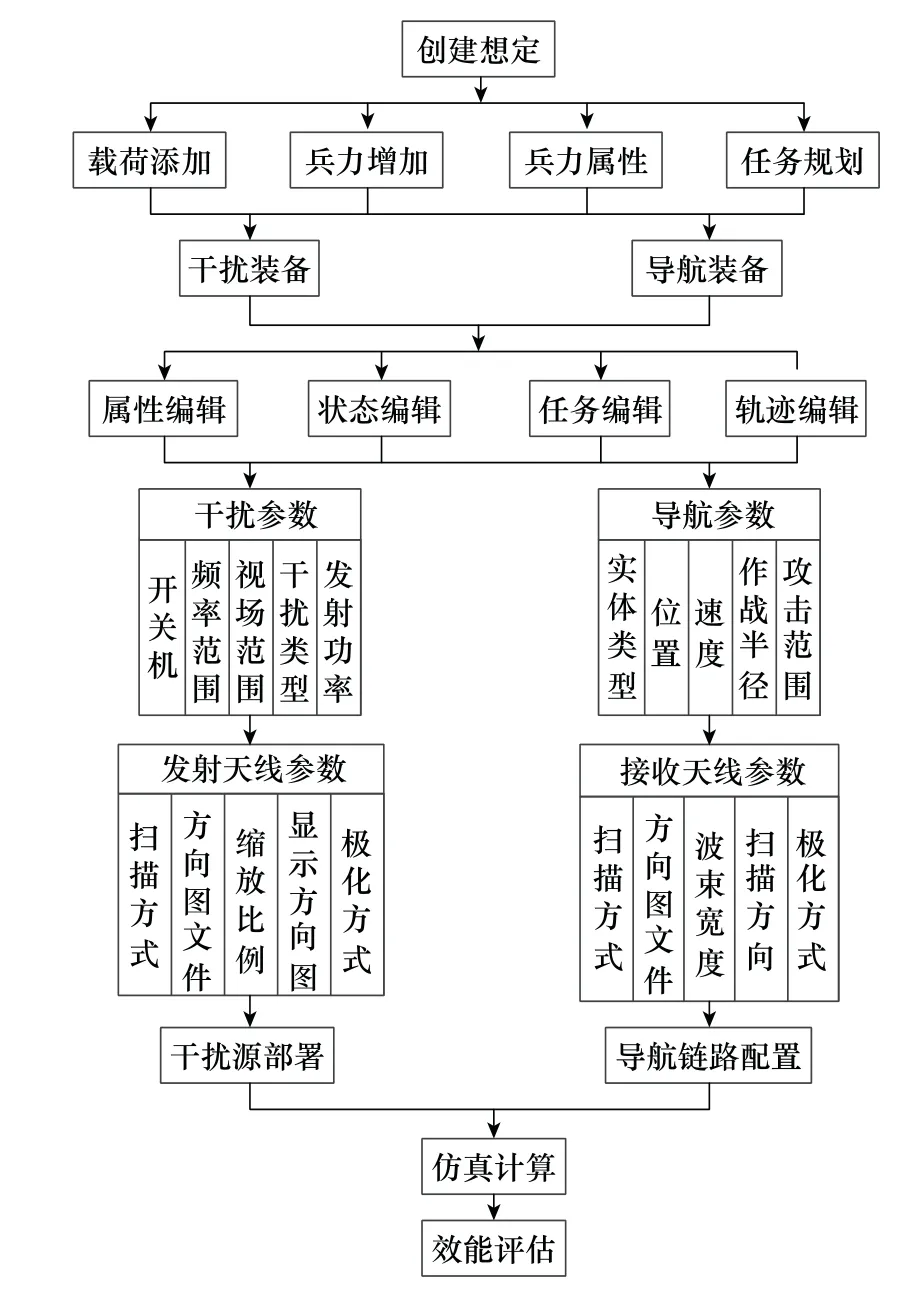
圖2 仿真評估系統(tǒng)工作流程Fig.2 Workflow of simulation evaluation system
2 衛(wèi)星導航對抗模型及算法
現(xiàn)代GNSS普遍采用的是無源、三球交會定位原理。在實際測距過程中,由于鐘差的存在,導致測量值與真值存在誤差[13-18]。當兩鐘間存在鐘差Δt時,這樣測得的距離并不是用戶和衛(wèi)星間的真實距離r,而是一個帶有誤差距離的偽距r*,這就需要測量用戶終端接收機到4顆衛(wèi)星的偽距,建立4個方程式解出用戶位置坐標。之后,GNSS用戶終端接收機的處理器進行協(xié)調控制,經過通道的信號截獲、信號跟蹤、數(shù)據(jù)收集,形成位置、速度、時間(position,velo-city,time,PVT)解,進而指導武器平臺的行動軌跡[19]。
而導航對抗作戰(zhàn)行動,是交戰(zhàn)雙方在導航信息領域進行進攻與防御行動。導航對抗進攻行動是以各種平臺干擾裝備和手段對敵方實施軟殺傷,通過欺騙、限制對方導航信息的保障作用,達到降低對手武器平臺作戰(zhàn)效能發(fā)揮水平的目的。包括欺騙式干擾和壓制式干擾兩大類,前者是利用虛假的GNSS信號來干擾、欺騙對方GNSS接收機對GNSS信號的正常接收,使其無法分辨接收到的信號正確與否,利用其中錯誤的GNSS參數(shù)進行定位解算,導致無法正確定位導航。后者是通過發(fā)射一定帶寬、頻率和功率的干擾信號,造成GNSS接收機的相關接收通道不能正常接收GNSS衛(wèi)星信號,使其無法正常導航定位。
導航對抗防御行動主要是指GNSS抗干擾技術和干擾源探測與定位技術。當前各國主要的抗干擾技術有頻域濾波、空域濾波、空時濾波、自適應調零天線技術、數(shù)字多波束天線技術、空時自適應數(shù)字濾波技術、窄帶干擾處理技術、直接P碼捕獲技術、抗多徑干擾技術、GNSS/慣導(inertial navigation system,INS)組合導航技術、從GNSS衛(wèi)星考慮的信號功率增強技術與專用軍碼(M碼)技術等,仿真評估系統(tǒng)中可采用設置情報參數(shù)對主要抗干擾技術進行模擬仿真。
2.1 欺騙干擾模型及算法
欺騙干擾是根據(jù)GNSS定位原理,通過給出偽導航信息(偽衛(wèi)星坐標)或增加信號傳播時延使GNSS接收機測量的偽距產生偏差的技術,分別對應于產生式和轉發(fā)式兩種欺騙干擾體制。產生式欺騙干擾對P碼加密后形成的Y碼以及軍用M 碼干擾難度很大,需要突破關鍵技術獲得GNSS碼以及導航電文數(shù)據(jù)。而轉發(fā)式欺騙干擾是將接收到的GNSS衛(wèi)星信號重新廣播出去,利用人為信號時延構造偽GNSS衛(wèi)星信號,使用戶終端接收機定位解算出現(xiàn)偏差,相比產生式干擾更容易實現(xiàn),其關鍵在于解決信號收發(fā)隔離問題,即從-20~-30 dB的信噪比中提取、放大信號,保證信號減少畸變并提高信噪比。
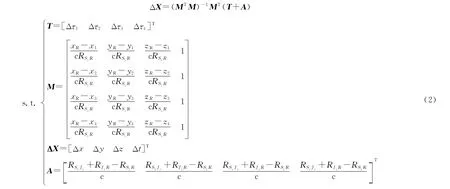
仿真評估系統(tǒng)主要針對轉發(fā)欺騙干擾進行研究,在戰(zhàn)區(qū)上空設置4套轉發(fā)式欺騙干擾轉發(fā)器Ji(i=1,2,3,4),對欲干擾目標的軌跡擬合,根據(jù)可視區(qū)域導航衛(wèi)星星座空間集合分布情況,篩選出符合目標位置點幾何精度因子(geometric dilution of precision,GDOP)值最優(yōu)的4顆衛(wèi)星進行轉發(fā),調節(jié)轉發(fā)增益,計算轉發(fā)衛(wèi)星信號接收功率P轉發(fā)和真實衛(wèi)星信號接收功率P真實,若兩者之比大于5 dB,認為欲干擾目標接收轉發(fā)欺騙信號。之后,在各路轉發(fā)器中注入獨立時延Δτi(i=1,2,3,4)。要迫使欲干擾目標接收機錯誤定位于欺騙點D,則轉發(fā)器的位置和時延需滿足

式(2)為時延T與欲干擾目標定位偏差ΔX的映射關系,通過計算式(2)的最小二乘解,可得
欺騙干擾模型的算法流程如圖3所示。
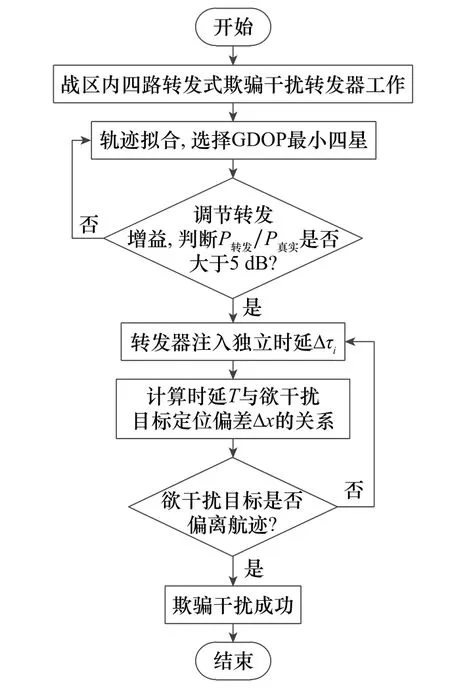
圖3 轉發(fā)式欺騙干擾算法流程圖Fig.3 Flow chart of forward deception jamming algorithm
2.2 壓制干擾模型及算法
壓制干擾是通過干擾源發(fā)射干擾信號來遮蔽對方GNSS信號頻譜使其接收機降低甚至喪失正常工作能力,包括連續(xù)波干擾、多音干擾、帶限高斯噪聲干擾、相關偽碼干擾、脈沖干擾和組合干擾等干擾樣式。
首先,建立作戰(zhàn)想定,通過武器數(shù)據(jù)庫確定藍方武器平臺類型及其組合導航方式(松耦合、緊耦合、深耦合)、慣導精度和接收機類型等參數(shù),錄入仿真評估系統(tǒng);根據(jù)已知情報設定對方接收機抗干擾濾波方式,來確定紅方的干擾樣式及參數(shù),并形成壓制干擾源部署方案。其次,通過APM高級電磁傳播理論,計算在真實環(huán)境中的干擾信號到達GNSS接收機前端的功率,計算接收機前端載噪比C/N J,系統(tǒng)繪制干信比、載噪比變化曲線,以判斷抗干擾濾波方式的有效性。最后,在干擾有效的情況下,計算載波鎖相環(huán)的振蕩器顫動σJPLL與非相干超前減滯后功率(noncoherent early minus late power,NELP)處理碼跟蹤環(huán)路產生的碼跟蹤誤差σJDLL,并與相應門限值進行比較,判斷接收機解調過程載波環(huán)或碼環(huán)是否失鎖。未失鎖時,干擾造成碼相位跟蹤誤差,從而引起偽距誤差,偽碼誤差乘以參與定位衛(wèi)星的GDOP值,被干擾目標采用有誤差的GNSS數(shù)據(jù)定位,系統(tǒng)繪制定位誤差曲線;干擾造成碼相位跟蹤環(huán)路失鎖時,則被干擾目標采用自身慣導系統(tǒng)進行定位,根據(jù)慣導精度逐漸產生偏差,系統(tǒng)計算并繪制藍方巡航導彈定位誤差曲線[20-23]。
壓制干擾下載波鎖相環(huán)的振蕩器顫動σJPLL的計算公式為

其中,設定B P=2 Hz或18 Hz(若為松、緊耦合,則接收機環(huán)路帶寬為18 Hz;若為深耦合,則接收機環(huán)路帶寬為2 Hz);T d=0.02 s;GNSS接收機前端接收衛(wèi)星信號載噪比,βr為接收機前端等效預相關帶寬,PJ為進入跟蹤環(huán)路的干擾功率;GJ(f)為歸一化的干擾信號功率譜密度,取值隨著干擾樣式的變化而變化,如式(4)所示;Gs(f)為接收衛(wèi)星信號的功率譜密度,如式(5)所示。深耦合可不考慮動態(tài)應力誤差,當式(3)中σJPLL>15°時,載波相位跟蹤環(huán)路失鎖[24-26]。
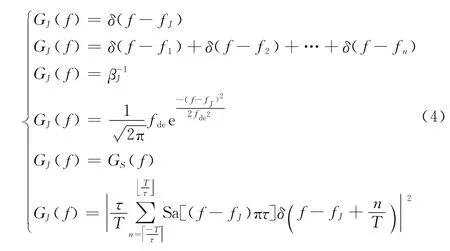

式中:f J表示單頻干擾中心頻率;n表示多音干擾頻點數(shù);βJ表示干擾帶寬;fde表示噪聲調頻有效調頻帶寬;f J表示噪聲調頻中心頻率;GS(f)表示相關偽碼干擾信號功率譜與相對應的衛(wèi)星信號功率譜相同;τ為脈沖寬度;T為脈沖周期;T cp表示P(Y)碼碼元寬度;T cm表示M 碼碼元寬度;f S為M碼副載頻。民用C/A碼的功率譜密度函數(shù)與P碼相似,只是碼元寬度不同。
干擾下的NELP 處理碼跟蹤環(huán)路產生的碼跟蹤誤差為

式中:B D設置同B P;T c為偽碼碼元寬度;T d為相關積分時間;d為1或1/8。由碼跟蹤誤差可以得到偽距測量誤差,乘以GDOP可得定位誤差。深耦合可不考慮動態(tài)應力誤差,σJDLL>d/6時,碼跟蹤環(huán)路失鎖[27-28]。
壓制性干擾模型的算法流程如圖4所示。
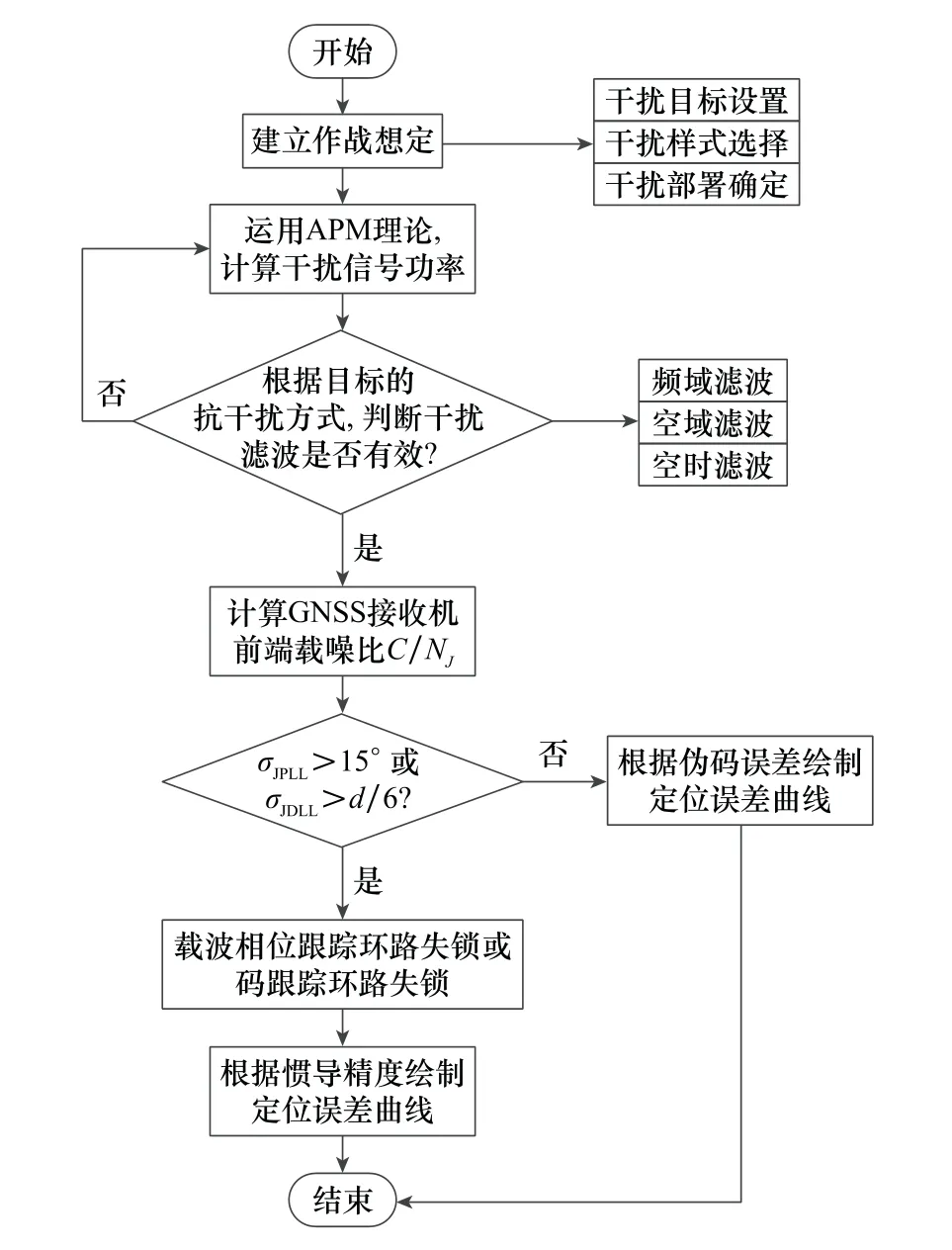
圖4 壓制干擾算法流程圖Fig.4 Flow chart of suppression jamming algorithm
2.3 APM
仿真評估系統(tǒng)考慮戰(zhàn)場環(huán)境真實性,增加復雜環(huán)境下電磁傳播路徑損耗算法,采用APM 理論[29-30]。該理論最早是來自于Hitney提出的混合模型,后來由美國海軍將其發(fā)展為高級傳播模型。APM 是射線光學和拋物方程理論的混合模型,克服了拋物方程模型計算量大的缺點,將傳輸區(qū)域分為4個部分:平面地球(flat earth,F(xiàn)E)模型、射線光學(ray optics,RO)模型、混合光學(parabolic equation,PE)模型和拋物線方程(extended optics,XO)模型,如圖5所示。
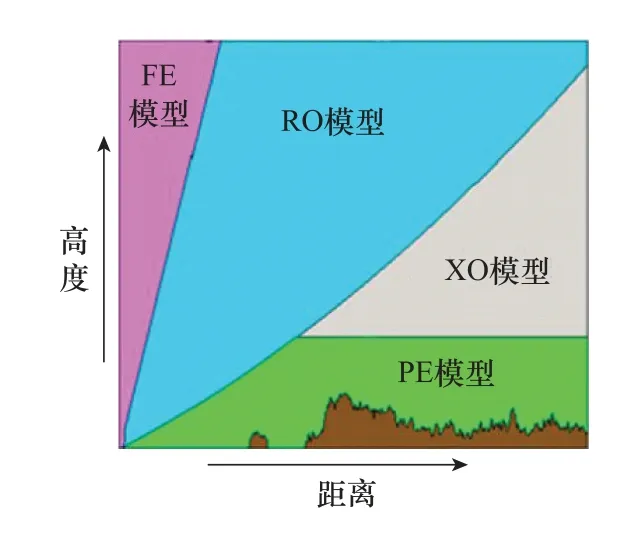
圖5 APM算法計算區(qū)域劃分Fig.5 Calculation area division of APM algorithm
其中,在天線仰角大于5°或距離小于5 km的情況下使用FE模型,計算中忽略了折射和地球曲率的影響;當距離大于FE區(qū)的最大距離時,使用RO模型,計算時考慮了折射率和地球曲率的影響;PE模型應用于距離超出RO區(qū),但高度小于PE解法要求的最大高度,這一最大高度取決于快速傅里葉變換(fast Fourier transform,F(xiàn)FT)的點數(shù);高度超過PE區(qū)的范圍時應用XO模型。
3 仿真評估實例
根據(jù)仿真評估系統(tǒng)總體方案和導航對抗原理,進行導航對抗作戰(zhàn)想定的仿真評估推演測試。創(chuàng)建作戰(zhàn)想定,依據(jù)雙方的兵力情報參數(shù)進行屬性編輯和鏈路配置,進行仿真計算,對推演過程進行3D與2D拓展圖場景展示,如圖6和圖7所示。

圖6 仿真評估系統(tǒng)啟動界面Fig.6 Start interface of simulation evaluation system

圖7 仿真評估系統(tǒng)任務編輯對話框Fig.7 Task editing dialog box of simulation evaluation system
下面以多站轉發(fā)欺騙式干擾和組合壓制式干擾為例,進行干擾任務仿真,驗證系統(tǒng)仿真評估結果是否可用、有效。
(1)以多站轉發(fā)欺騙式干擾為例進行系統(tǒng)測試,假定藍方巡航導彈以均勻直線運動攻擊目標,紅方部署多干擾源對藍方巡航導彈進行持續(xù)性欺騙式干擾,以黃線代表巡航導彈預定軌跡,藍線代表受干擾后軌跡,綠線為巡航導彈所接收的衛(wèi)星星座信號,計算導彈受干擾后的位置偏差。兵力部署情況如圖8所示。干擾任務場景如圖9所示,干擾結果如圖10所示。
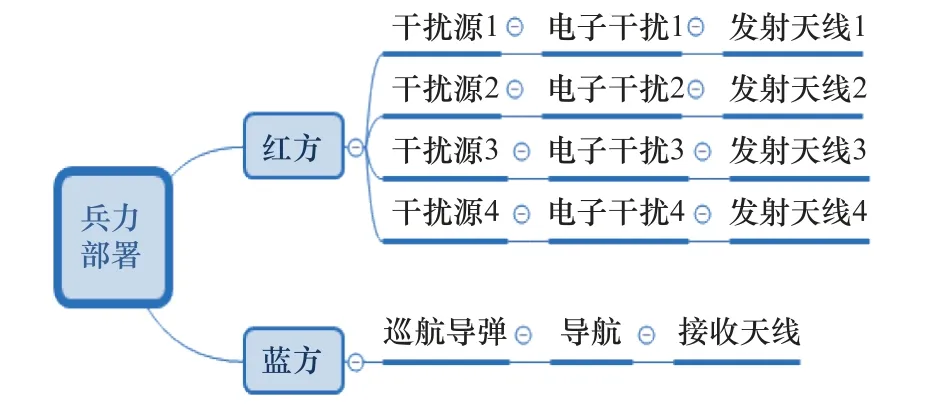
圖8 雙方兵力部署Fig.8 Deployment of forces for both sides
圖9 多站轉發(fā)欺騙式干擾對抗任務場景Fig.9 Multi-station forward deceptive jamming countermeasure task scenario
圖10 多站轉發(fā)欺騙式干擾結果Fig.10 Results of multi-station forward for deceptive jamming
從圖10多站轉發(fā)欺騙干擾結果中,可以看到藍方巡航導彈的實時屬性與時空信息變化情況,顯示施加干擾后偏離預定軌跡,紅方的重要目標可得到保護。
(2)以組合壓制干擾為例進行系統(tǒng)測試,假定藍方巡航導彈以勻速直線運動,紅方在戰(zhàn)區(qū)范圍內部署多個固定基站壓制干擾源,采用多種干擾樣式對來襲目標進行干擾,系統(tǒng)后臺采集巡航導彈的導航信息進行干信比、定位誤差等數(shù)據(jù)采集分析,判斷干擾結果。干擾場景如圖11所示,藍方巡航導彈的時空信息實時顯示。
圖11 組合壓制干擾場景展示Fig.11 Combined suppression jamming scene display
圖12為藍方巡航導彈在任務過程中受到干擾后的干信比變化曲線,圖13為藍方巡航導彈定位誤差變化曲線,從兩條曲線的變化情況中可以看到,巡航導彈在飛行穿越預設干擾源的航線過程中,巡航導彈受干擾后的干信比與“導彈-干擾源”間距離成反比,定位誤差急劇增大。在越過干擾源后,隨著巡航導彈背離干擾源部署區(qū),巡航導彈經過GNSS信息源的鏈路重構,定位誤差回到正常水平,重回預定航跡。
圖12 藍方巡航導彈干信比變化曲線Fig.12 Change curve of interference to signal ratio of blue side cruise missile
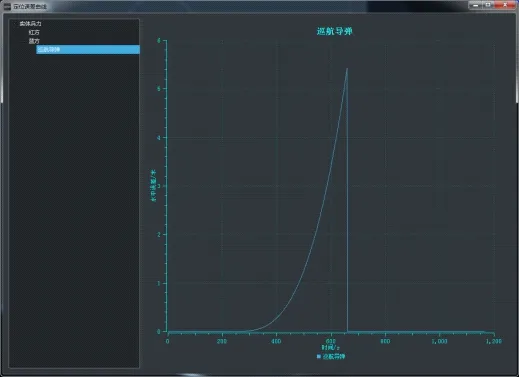
圖13 藍方巡航導彈定位誤差變化曲線Fig.13 Change curve of positioning error of blue side cruise missile
4 結 論
聯(lián)合戰(zhàn)場導航對抗仿真評估系統(tǒng)用于建立導航系統(tǒng)和干擾仿真環(huán)境,深入分析導航對抗作戰(zhàn)原理,融合電波傳播模型和用戶終端導航響應模型,可以仿真不同干擾部署環(huán)境對導航系統(tǒng)的影響,為導航系統(tǒng)的干擾仿真評估提供參考依據(jù)。仿真推演者可充分運用統(tǒng)計學、概率論、博弈論等科學方法,對導航對抗任務全過程進行仿真、模擬與推演,專業(yè)技術人員可以通過對信噪比曲線、定位誤差曲線以及距離曲線進行干擾效果評估,并為指揮管理人員提供干擾任務輔助決策參考,制定導航對抗任務策略,以加強聯(lián)合戰(zhàn)場電磁環(huán)境建設,按照軍事規(guī)則研究和塑造戰(zhàn)場局勢。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業(yè)設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數(shù)理化·七年級數(shù)學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數(shù)學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
