模糊自整定PID對開關磁阻電機轉矩脈動抑制
2022-10-11 13:29:38安治國張東陽王龍軒
重慶理工大學學報(自然科學) 2022年8期
關鍵詞:控制策略
安治國,張 振,張東陽,王龍軒
(重慶交通大學 機電與車輛工程學院, 重慶 400074)
0 引言
開關磁阻電機(SRM)具有魯棒強、控制靈活、運行可靠、調速方便以及成本低廉等優點,被廣泛應用于航空航天、新能源汽車及通用工業等諸多領域[1-4]。開關磁阻電機的雙凸極結構,使得磁通波路徑分布非線性,相電感參數非線性化,很難建立與轉子位置角的函數關系,而電磁轉矩又是電感與電流的函數,因此電磁轉矩難以調節。由于轉矩-電流-角度非線特性的特點,使其在低速和換相期的轉矩脈動較大,從而引起較大的振動與噪聲,這就限制了開關磁阻電機在NVH性能要求較高領域的應用[5]。
目前對于轉矩脈動的優化主要集中在結構和控制2個方面[6]。其中,控制方法的優化可以在不改變電機結構的情況下,優化轉矩脈動,減少振動于噪聲,因此受到廣泛關注。
文獻[7]提出了一種無差拍轉矩控制結合磁鏈控制的控制策略,以此來提高對轉矩和磁鏈的準確控制。文獻[8]為了實現對轉矩和磁鏈的精準控制,采用傅立葉級數形式建立非線性轉矩模型以實現轉矩控制,能夠有效抑制轉矩脈動,但是在電機低速運行的效果不明顯。文獻[9]提出在電動汽車SRM直接瞬時轉矩控制策略上加入線轉矩估計器和一個轉矩誤差補償器,通過仿真驗證了此策略對低速時的轉矩脈動抑制效果明顯。文獻[10-11]分別提出了脈寬調制結合直接瞬時轉矩的控制方法及分段占空比PWM的方法,對電機每相占空比進行準確控制,但是占空比的選取依賴電機的結構參數,在實際操作中難以實現。文獻[12]對直接轉矩控制和轉矩分配控制2種控制策略進行了對比分析,表明在無法獲取磁鏈特性的情況下,轉矩分配函數具有更好的控制效果。文獻[13]提出將電流分配和磁鏈分配結合,以此來實現對電流和磁鏈的直接控制,實現更高的控制靈敏度,但是難以獲得電流的非線性關系,控制效果不甚理想。文獻[14]提出了在直接瞬時轉矩控制基礎上引入分數階積分,仿真表明提出的模糊分數階PID雙閉環控制器能夠減少轉矩脈動,加快系統響應,但是會減小電機運行的穩定性。文獻[15]提出了一種高性能的間接控制方案來抑制轉矩脈動,通過獲得最優的電流分布,準確跟蹤電流,減小紋波從而抑制轉矩脈動。文獻[16]提出了一種改進的電動汽車開關磁阻電機間接瞬時轉矩控制(IITC)策略,通過引入改進的力矩共享函數,并采用粒子群優化算法(PSO),確定了傳統智能控制系統的最優控制參數。仿真結果表明了所提控制方法在變速范圍內的可行性和有效性,但是無法補償非線性關系。文獻[17-20]提出了運用DITC策略減少轉矩脈動,通過直接對轉矩的控制來加快系統響應,很好的抑制了轉矩的脈動,但是無法精準跟蹤電流,會出現較大的電流峰值。
綜上所述,直接轉矩控制策略對轉矩脈動抑制效果較好,但是會減小電機運行時的穩定性,對于制造要求比較高,并且會降低低速運行的效率;轉矩分配控制需要獲得復雜的分配函數,增加了算法的復雜程度。為了克服以上困難,將傳統PWM控制方法與智能算法相結合的研究被研究人員廣泛關注。為此,本文提出了一種模糊自整定PID與脈寬調制(PWM)相結合的控制方法。
1 模型與方法
1.1 SRM數學模型
1) 電壓回路方程。
開關磁阻電機的電壓回路方程如式所示
(1)
式中:U為繞組端電壓;R為繞組電阻;i為繞組電流;ψ繞組磁鏈;θ為轉子位置角。
考慮各相繞組間互感較小,公式可以進一步寫為
(2)
式中,ω為機械角速度。
2) 機械運動方程。
根據力學定律轉矩平衡方程
(3)
式中:TL為負載轉矩;J為轉動慣量;B為摩擦因數。
當電機運行穩定后,公式為
(4)
電機每相運動一個周期的總機械能為
(5)
繞組的磁共能為
(6)
當電流恒定時,瞬時轉矩為
(7)
當忽略磁鏈飽和電磁轉矩可以簡化為

(8)
1.2 電流斬波控制方法
傳統的電流斬波控制系統主要包括電機、功率變換器、轉速檢測、電流檢測、PI控制器等,轉速誤差經過PI控制器產生參考電流,參考電流與瞬時電流的偏差經過電流滯環控制單元,產生信號作用在功率轉換器上,從而實現控制電流斬波控制,控制框圖如圖1所示。
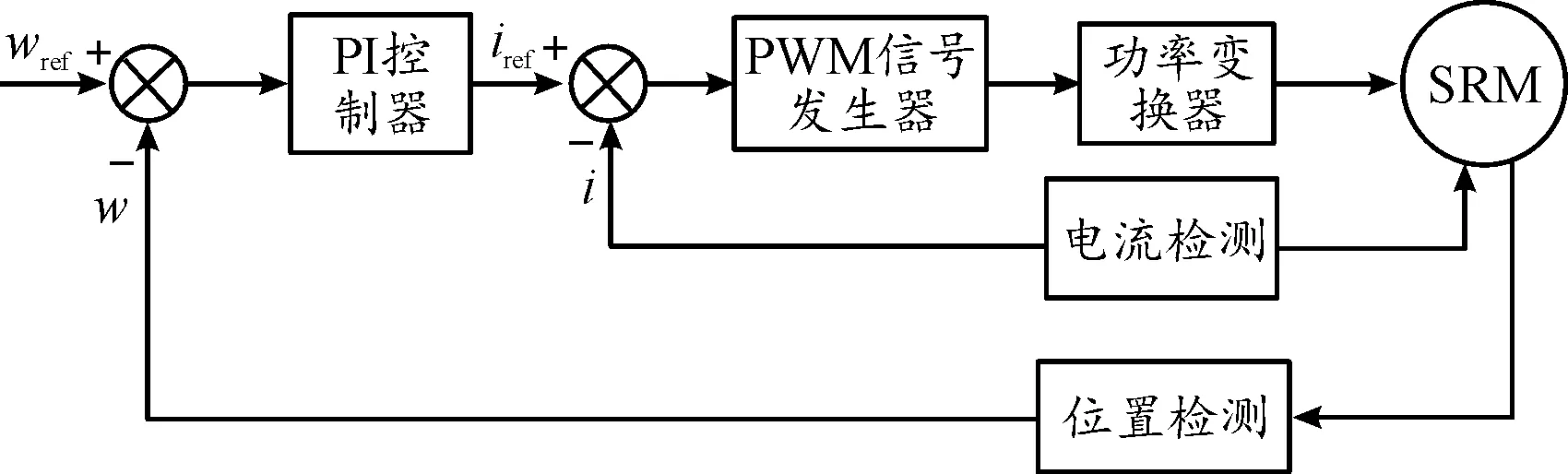
圖1 傳統PWM控制框圖
電流斬波控制不依賴控制對象的數學模型,電機的施加電壓、開通角以及關斷角保持不變,通過反饋轉速和反饋電流來實現雙閉環控制,用反饋值與給定值的誤差上下限對開關進行導通和關斷,從而實現將電流值控制在所要求的范圍內。根據開關磁阻電機的工作原理可知,電感變化率在電感上升開始和結束的區間比較小,這一區間電流也比較小,并造成繞組輸出的瞬時轉矩減小,引起轉矩脈動。在仿真過程中,相電流的值是采樣獲得的離散值,因此不對稱半橋驅動電路接收到的開關信號相對于電流的變化會有所滯后,在控制過程中電流變化太快,會出現在滯環區間之外的情況,因此產生較大的電流脈動。
1.3 模糊自整定PID控制器
模糊自整定PID控制器主要是根據轉速的誤差來自動調節PID控制器的參數,通過一定的規則實時對隸屬函數進行修改,使電機各相在符合要求的區域導通,并且在電機工作中對電機參數實時調整以獲得最優控制。其控制原理如圖2所示。模糊自整定PID控制算法的流程如圖3所示。

圖2 模糊自整定PID控制器原理圖

圖3 控制算法流程框圖
模糊自整定PID控制離散算法為
(9)
式中:k為采樣系數;T為采樣周期;e為誤差。
控制器以電機轉速誤差e和轉速誤差變化ec作為控制器的輸入,利用模糊規則對控制器參數進行修改。
PID參數kp、ki和kd應用模糊合成推理進行設計,第k個采樣時間的整定為:
kp(k)=kpo+Δkp(k)
(10)
ki(k)=kio+Δki(k)
(11)
kd(k)=kdo+Δkd(k)
(12)
在第k周期,對電機的運行狀態進行采樣,獲取電機的瞬時轉速信息,得到此時誤差e以及ec,將其關系進行模糊化,根據模糊規則對進行整定,計算當前時刻的PID參數控制輸出u(k)。
2 模糊自整定PID控制器設計
2.1 模糊控制系統的建立
模糊自整定PID控制系統如圖4所示。

圖4 模糊自整定PID控制系統框圖
控制系統主要由2部分組成,模糊自整定PID控制器和PWM信號發生器,模糊自整定PID輸入電機轉速信息根據模糊規則輸出參考電流,同時電流檢測單元對輸出電流進行檢測,與輸出的參考電流比較求出誤差,并輸出電流信號。PWM信號發生器根據輸出的電流信號發出控制信號,從而控制電機工作。
2.2 隸屬函數建立
隸屬函數的選取對結果影響比較大,根據具體要求采用分布比較均勻的三角形函數。電機給定轉速設為800、1 000、1 200和1 400 r/min,以1 200 r/min為例設定隸屬函數。在控制器中基本論域是輸入量的變化范圍,2種工況對應的輸入e和ec的基本論域取為[-1 200,1 200]。輸入量e和ec是準確值,將其轉化為模糊量E和EC,設定E、EC和輸出U的模糊論域為[-6,6],在語言值的模糊子集為:
E、EC={NB,NM,NS,ZO,PS,PM,PB}E、EC、U的隸屬函數如圖5所示。

圖5 E、EC、U的隸屬函數
2.3 模糊控制規則的建立
模糊控制的語言規則可以描述如下:
1) 當電機工作時獲取的瞬時轉速小于給定值時,模糊自整定PID控制器輸出電流值,該電流為期望電流值,期望電流值減小,期望電流值減小的幅度與轉速偏差成正比。
2) 當電機工作時獲取的瞬時轉速為給定值時,期望電流值保持不變。
3) 當電機工作時獲取的瞬時轉速小于給定值時,期望電流值增加,期望電流值增大的幅度與轉速偏差成正比。
根據規則修正表如表1—3所示。
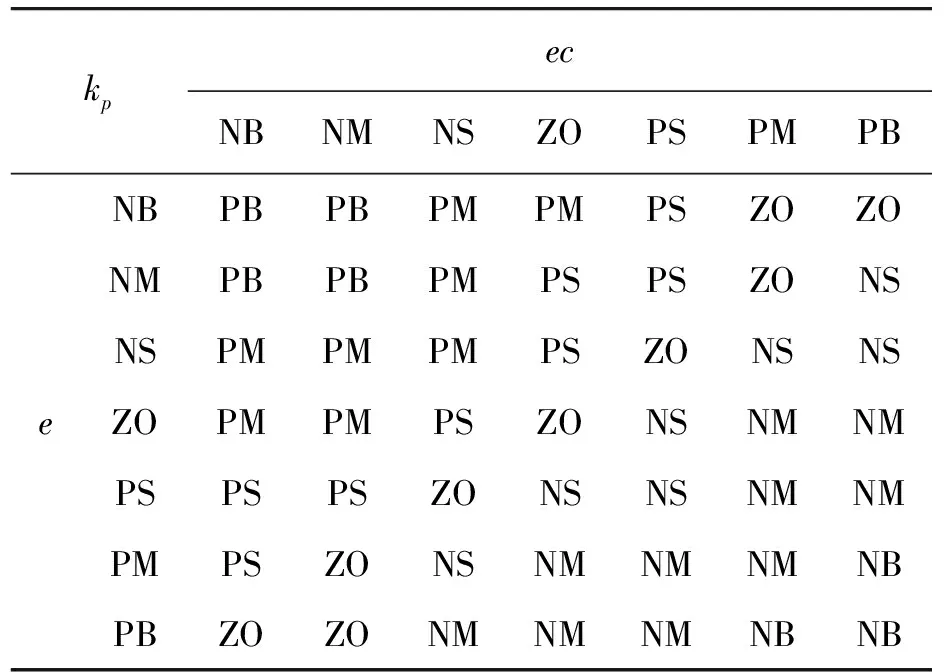
表1 kp的修正規則表
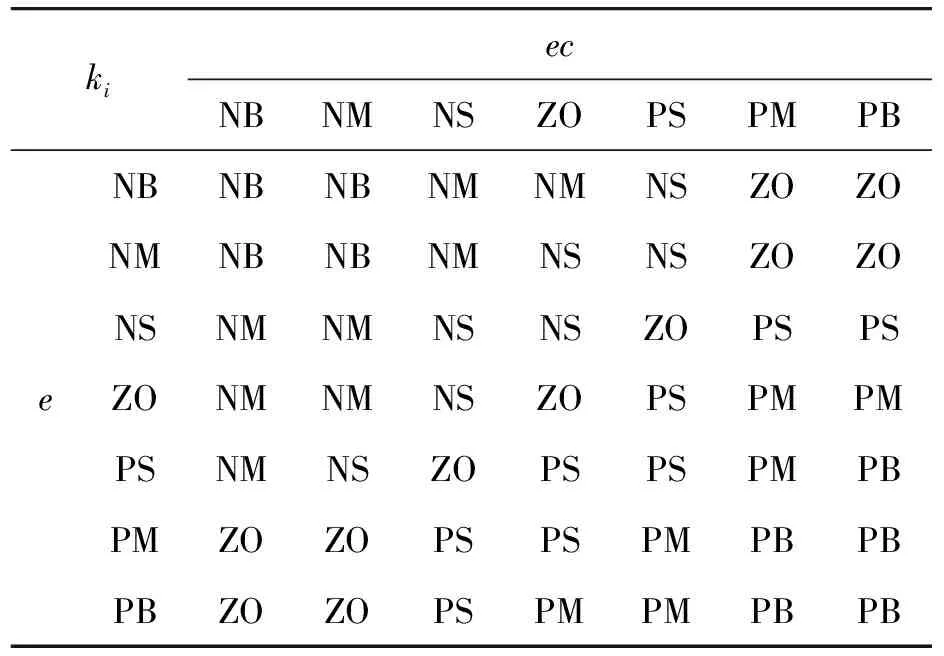
表2 ki的修正規則表

表3 kd的修正規則表
3 結果與討論
利用Matlab/Simulink仿真平臺,把模糊自整定PID與傳統的電流斬波進行對比,在0.1 s后加入50 N·m的負載力矩。電機采用三相6/4開關磁阻電機,額定功率為60 kW,額定電壓120 V,轉速設定為分別800、1 000、1 200及1 400 r/min。
為了便于分析轉矩脈動的程度,定義Kt為轉矩脈動
Kt=(Tmax-Tmin)/Tav
(13)
式中:Tmax為電機穩定工作后的最大瞬時轉矩;Tmin為最小瞬時轉矩;Tav為平均轉矩。
Kt值越小說明對電機轉矩脈動的抑制效果越好。
由圖6—9可知當電機分別以800、1 000、1 200和1 400 r/min工作時的轉矩波形和電流波形。在負載加入的起始階段模糊自整定PID控制器能夠很好的減小脈動,防止在起始瞬間產生較大的脈動,穩定工作后傳統PID控制的轉矩最大值分別為82、82、85、98 N·m,Kt分別為0.92、0.73、0.69、0.84。模糊自整定PID控制的轉矩最大值分別為78、64、70、89 N·m,Kt分別為0.68、0.58、0.59、0.73。

圖6 轉速800 r/min波形對比

圖7 轉速1 000 r/min波形對比
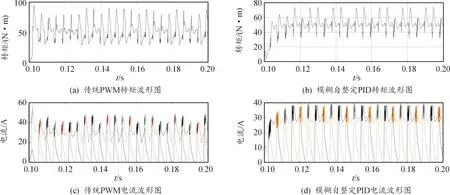
圖8 轉速1 200 r/min波形對比

圖9 轉速1 400 r/min波形對比
不同參考轉速下的對比結果如表4所示,Imax1傳統PWM的電流峰值,Imax2為模糊自整定的PWM電流峰值,ΔImax為電流峰值的差值,Tmax1傳統PWM的轉矩峰值,Tmax2模糊自整定PWM的轉矩峰值,ΔTmax為轉矩峰值的差值,Kt1傳統PWM的轉矩脈動,Kt2為模糊自整定的PWM轉矩脈動,ΔKt為轉矩脈動的差值。

表4 2種控制方法對比分析
由表4可知,提出的模糊自整定PID的PWM的控制方法相對于傳統的PWM方法對在不同轉速下都可以減少電流峰值,在轉速為800和 1 000 r/min時電流峰值分別減少了8 A和5 A,在其他轉速也有不同程度的降低。當電機以1 000 r/min工作時轉矩最大值減小了18 N·m,轉矩脈動在800 r/min時優化了0.24,在其他轉速均有很好的優化效果。
在傳統的PWM控制方式下,傳統的PID控制器的參數為定值,無法實時地跟隨轉速的波動,電流和轉矩的波動比較大。在負載剛加入的時候轉矩急劇上升,當轉速在1 200 r/min時還會出現較大的初始轉矩脈動,在換向時轉矩脈動也比較大。模糊自整定PID控制策略可以根據實時的轉速信息調節PID的參數,加入負載后以及換向時轉矩能很好地過渡,防止過大的轉矩脈動和電流峰值。
4 結論
針對傳統PWM控制策略轉矩脈動較大,提出了一種結合模糊自整定PID的PWM方法,基于Matlab/Simulink平臺搭建了電機控制策略仿真模型,利用模糊規則獲取參考電流,將電流作為控制量,產生控制信號作用在功率變換器上,并與傳統PID的PWM控制進行對比分析,得出以下結論:
1) 模糊自整定PID能夠很好地和PWM控制策略結合,防止加入負載初始階段以及平穩工作時產生較大的轉矩脈動,能夠很好地減小電流峰值抑制轉矩脈動。
2) 對比不同轉速下的轉矩脈動,模糊自整定PID相對與傳統的PWM控制策略在不同轉速下都可以使轉矩平穩過渡并且很好地抑制轉矩脈動。
3) 當轉速超過1 200 r/min時,模糊自整定PID控制策略不僅可以使轉矩平穩過渡抑制轉矩脈動,不會產生過大的轉矩波動,防止電機平穩運行后產生不穩定轉矩。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36