燃料電池汽車雙層模糊控制能量管理策略
2022-10-12 04:14:42于瀛霄夏長高韓江義史金鐘高海宇
重慶理工大學學報(自然科學) 2022年8期
關鍵詞:優化
于瀛霄,孫 閆,夏長高,韓江義,史金鐘,高海宇
(1.江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013;2.拖拉機動力系統國家重點實驗室, 河南 洛陽 471039; 3.德燃動力科技有限公司, 浙江 嘉興 314000)
0 引言
能源危機與全球氣候問題是限制內燃機汽車發展的重要因素[1]。隨著氫能技術的愈發成熟,質子交換膜燃料電池(proton exchange membrane fuel cell,PEMFC)逐漸應用于新能源汽車[2]。PEMFC有著高能量密度、高轉換效率等優勢,但其本身結構及材料的理化性質等因素導致了PEMFC的動態特性較差,輸出特性偏軟,不能適用于頻繁的變載工況[3],同時燃料電池只能將化學能轉換為電能,能量轉換的單向性導致其無法回收制動能量。因此,燃料電池電動汽車(fuel cell electric vehicle,FCEV)通常都配備了動力電池或者超級電容,一方面,可以通過電池或者超級電容回收制動能量。另一方面,在負載需求較大時,由電池或超級電容提供大功率,從而達到給燃料電池輸出功率“削峰填谷”的作用。采用燃料電池+電池或者燃料電池+超級電容的車輛可以提升續航能力,也能夠使車輛適應更加復雜的行駛工況,同時還可以有效提升燃料電池的使用壽命。
多電源的能量管理策略(energy management strategy,EMS)是影響整車動力性、經濟性以及耐久性的重要因素[4]。車輛在實際行駛過程中,工況處于實時變化的狀態,對于復雜多變的被控對象,傳統的控制方法往往效果不佳。模糊控制能夠將系統精確量模糊化,利用專家經驗進行非線性控制[5]。這種方法不需要量化的參考變量,具有控制邏輯簡單,易于實現等優勢[6]。在FCEV中,模糊控制需要結合不同的需求以及部件狀態,實時更新燃料電池輸出功率。Che等[7]提出了基于自適應方法的模糊控制策略,用于控制燃料電池與電池之間的功率流,使SOC保持在良好范圍內。Saib等[8]將需求功率、需求功率誤差以及電池SOC作為模糊控制器輸入參數,控制燃料電池輸出功率,提升了FC的動態響應。Gao等[9]為了解決燃料電池系統響應慢等缺點,利用模糊控制器優化了系統功率分配,并通過實驗驗證了方法的有效性。因此,模糊控制在燃料電池輸出功率控制方面具有較好的適用性。
在FCEV的實際行駛過程中,復雜的運行工況對燃料電池的使用壽命有著重要的影響[10]。研究表明,變載、啟停、空載、大功率輸出工況會加速燃料電池性能衰退。Song等[11]構建了燃料電池耐久模型,考慮了燃料電池性能衰退成本及能耗成本,利用龐德里亞金極小值原理優化了車輛能耗。降低了系統總運行成本。Zhang等[12]為了降低燃料電池變載對使用壽命的影響,在系統中配置了3個子燃料電池作為燃料電池系統。各個子燃料電池分別工作在固定工況,通過協調不同燃料電池之間的啟停控制來實現輸出功率的分級控制。Wu等[13]提出了一種魯棒在線EMS來處理不確定的行駛周期,引入一個懲罰系數修正燃料電池輸出功率,降低了燃料電池的輸出功率的變化。因此,在制定模糊控制策略時,不僅要考慮整車經濟性,更要考慮燃料電池壽命的保護。
傳統模糊控制主要解決多電源能量分配問題,同時以減少運行成本、提升部件使用壽命或降低能源消耗為目標對模糊控制的隸屬度函數分布進行優化,但是很少有學者考慮燃料電池實際的輸出特性。當負載需求快速上升時,傳統模糊控制會控制燃料電池目標輸出電流跟隨負載快速上升,而燃料電池在實際使用過程中內部化學反應需要一定時間,且由于空壓機葉片具有慣性導致壓縮空氣無法立刻滿足化學反應所需的流量,所以現階段燃料電池的動態輸出特性往往較差,無法適應車輛頻繁變化的負載特性需求,而傳統的模糊控制策略只能通過復雜的規則設定、減小燃料電池的目標輸出電流范圍,或者將負載高頻變化的部分由電池來承擔,以此來約束燃料電池電流的變化率,但該方法難以適應不同的道路工況,且規則制定更加復雜,整車經濟性也往往較差。
本文主要基于上述問題提出了一種雙層模糊控制策略,第一層模糊控制解決了多電源能量實時分配問題,第二層模糊控制限制了燃料電池電流的變化速率。另外,構造了兼顧能耗及部件耐久損耗的運行成本函數,利用人工蜂群優化算法,從全局優化的角度訓練出了最佳的模糊控制隸屬度函數組合以及模糊規則權重。該方法既解決了雙電源能量分配的問題,并保證了燃料電池的實際動態輸出特性在合理范圍之內,又有效降低了整車運行成本,提升了部件使用壽命。
1 動力系統結構及模型
1.1 動力系統結構
本文動力系統及車輛模型是基于Zotye?X5緊湊型SUV建立的,并在現有平臺上改進動力系統。其結構如圖1所示。
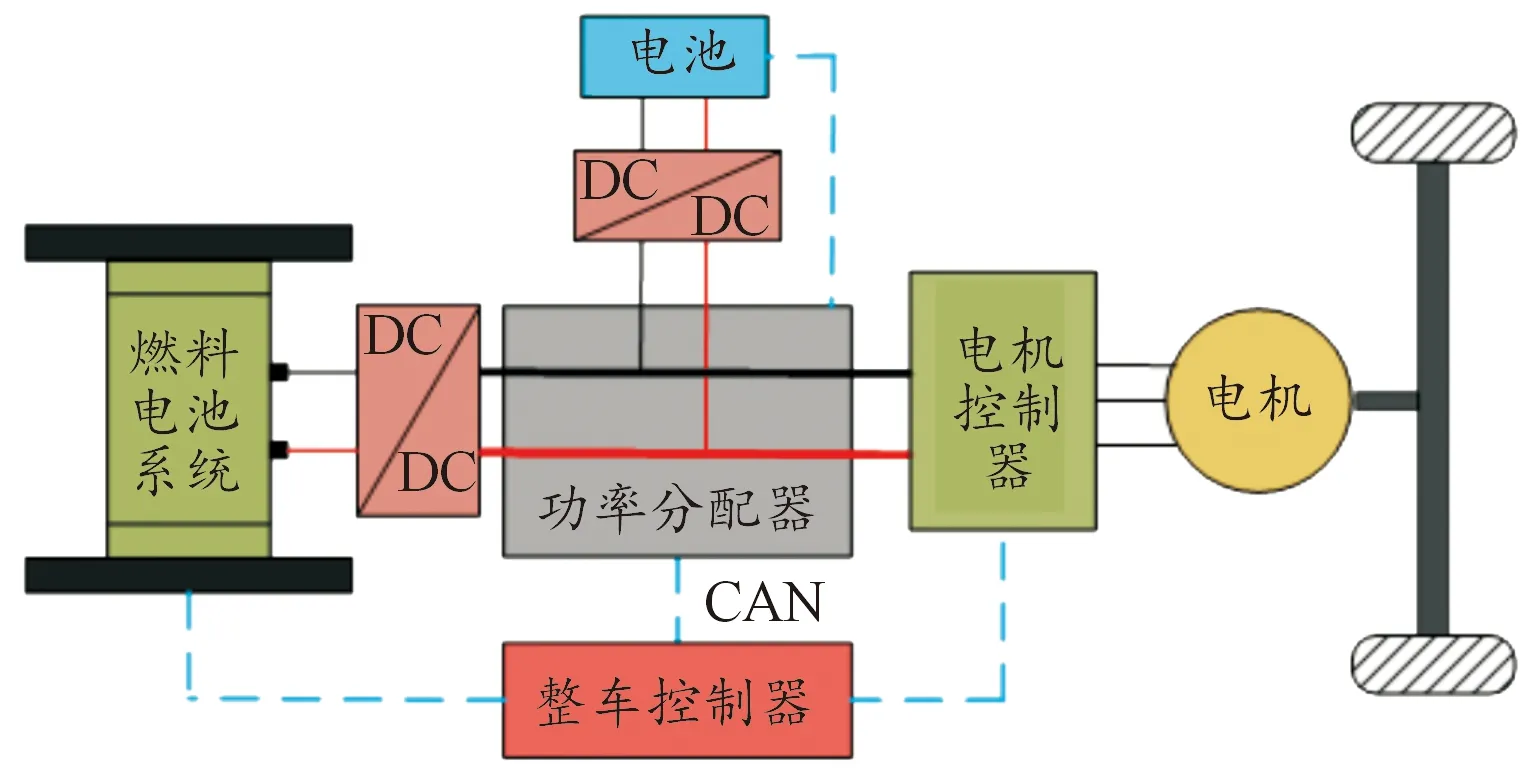
圖1 動力系統結構示意圖
整車動力系統主要包括燃料電池系統、電池、單向DC/DC變換器、雙向DC/DC變換器、功率分配器、整車控制器、電機控制器、電機等。車輛在行駛過程中,整車控制器接收駕駛員功率需求信號,并計算出扭矩命信號發送給電機控制器,電機控制器根據扭矩命令信號計算出電流需求,功率分配器接收電機控制器計算出的電流需求信號,并按既定策略將其分配給動力電池與燃料電池。車輛與動力系統及部分零部件參數見表1。
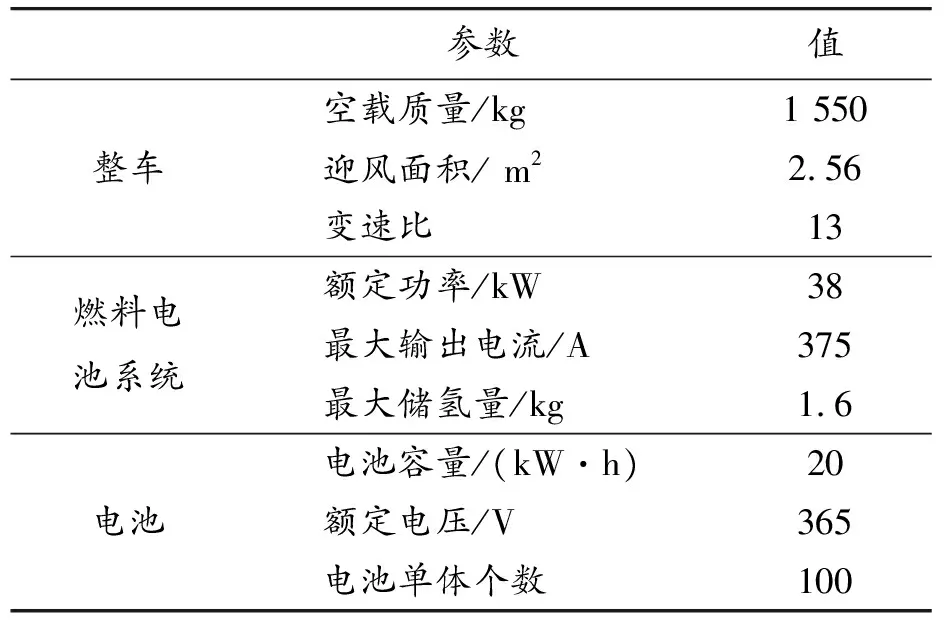
表1 車輛與動力系統及部分零部件參數
1.2 縱向動力學模型
根據車輛縱向動力學方程計算車輛受到的總阻力,如下[14]:
(1)
式中:Ft為牽引阻力,Cr為滾動阻力系數,θ為坡度,Cd為空氣阻力系數,A為迎風面積,δm為旋轉質量系數,ρ為空氣密度,V為車輛速度,a為車輛加速度。
車輛根據當前車速V和牽引力Ft獲得需求功率Preq,如式(2)所示:
Preq=Ft·V
(2)
1.3 燃料電池系統模型
燃料電池的工作效率與當前系統的氫氣消耗率有關,而氫氣消耗率與系統輸出電流成非線性比例關系。燃料電池系統氫氣消耗、輸出電流以及工作效率之間的關系如下:
Ifc=Icell·N
(3)
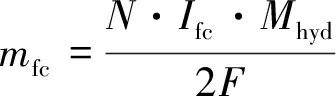
(4)
(5)
式中:Icell為電堆單體電流,N為電堆單體個數,mfc為系統瞬時氫氣消耗速率,Ifc為燃料電池系統輸出電流,Mhyd為氫氣摩爾質量,F為法拉第常數,LHVhyd表示氫氣低熱值。
本文在實驗室環境中,搭建了燃料電池系統測試臺架(圖2),用以測試系統特性曲線。主要部件包括電堆、氫氣循環泵、燃料電池控制器、空壓機、冷卻系統、模擬負載。
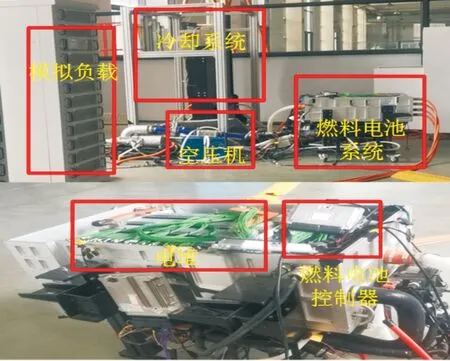
圖2 燃料電池系統測試臺架
在諸多影響耐久性的因素中,變載占據主導地位。燃料電池變載能力受到空壓機功率限制。本文所用的燃料電池系統實際變載能力通過臺架試驗測得,為5 A/s。本文通過臺架試驗得出了燃料電池V-A特性、氫氣消耗以及效率曲線,見圖3。
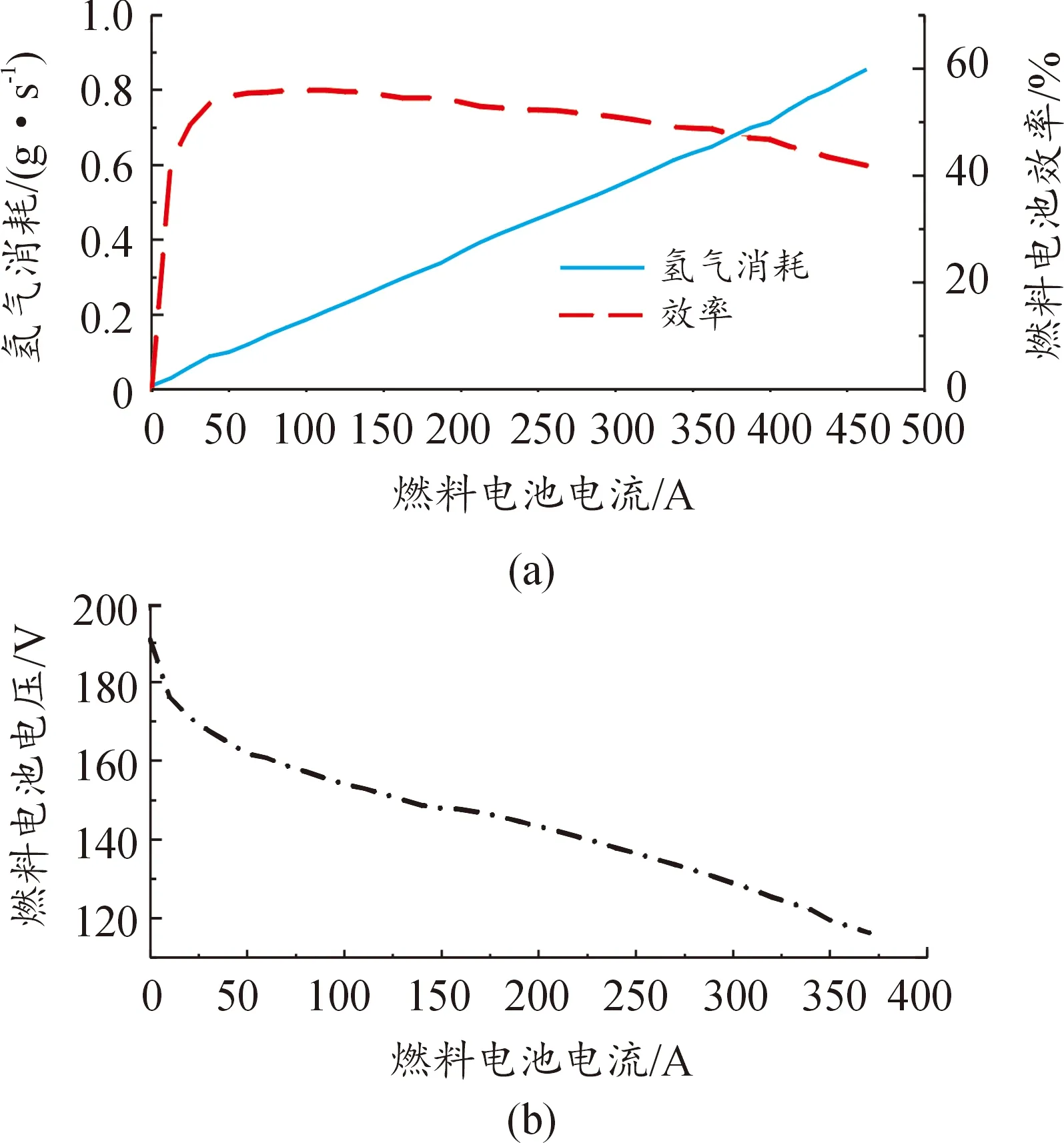
圖3 燃料電池V-A特性、氫氣消耗以及效率曲線
燃料電池運行過程中影響其耐久性的不利工況主要包括變載、啟停、怠速以及過載等。建立燃料電池耐久損耗模型如下[15]:
Dfc=dchange+don-off+didling+dhigh
(6)
式中:Dfc為燃料電池總性能衰退百分比,dchange、don-off、idling、dhigh為由變載、啟停、怠速、過載導致的燃料電池性能衰退百分比。
1.4 電池模型
電池采用等效內阻模型。電池功率、輸出電流、內阻和SOC之間的關系如下[16]:
(7)
(8)
式中:Pbat為電池輸出功率,Vocv為開路電壓,Ibat為輸出電流,Rbat為電池內阻,ηbat為庫倫效率,Cbat為電池容量。
1.5 電機模型
在車輛運行過程中,電機根據VCU發送的扭矩命令和當前電機轉速計算電機電流需求。燃料電池和電池的功率分配問題就轉換為電流分配問題[17]。建立的電機模型如下[18]:
Pmot=ηmot·Pelc
(9)
(10)
式中:Pelc為電池和燃料電池提供的電功率,Pmot為電機輸出的機械功率,ηmot為電機轉換效率,Ireq為需求電流,Plost為電機損失功率,Vmot為電機電壓。
2 能量管理策略
2.1 模糊控制策略
對于一些復雜被控對象,系統中某些控制變量往往不容易量化,運用常規的控制方法不易對其進行精準控制。首先構建了頂層控制邏輯,通過有限狀態機劃分整車運行狀態,如制動能量回收、停車、電池單獨供電、協同供電,并定義了各個狀態的準入準出條件,其頂層控制邏輯如圖4所示。圖4中,SOCswitch、SOClow分別表示燃料電池開啟時的電池SOC值以及電池SOC下限,SOCint表示電池初始SOC值;Ifc表示燃料電池輸出電流,其大小由下文2.2節雙層模糊控制決定;Ibat表示電池輸出電流;H2表示系統氫氣實時消耗量;H2con表示系統氫氣總儲量。
在頂層控制邏輯中,SOCint為90%,SOCswitch為40%,SOClow為10%。開始時,電池SOC較高,車輛以純電動模式運行,此時電池單獨滿足驅動電機電流需求;當SOC降低至40%時,開啟燃料電池并以Ifc進行輸出;如果需求電流Ireq>Ifc,燃料電池和動力電池共同為車輛提供動力,如果Ireq≤Ifc,燃料電池單獨驅動電機并且多余的電流(Ifc-Ireq)給電池充電。最后當SOC升高至40%時,關閉燃料電池,車輛回到純電動模式。如此循環持續至氫氣消耗完畢,最后進入純電動模式直至SOC降低至10%。
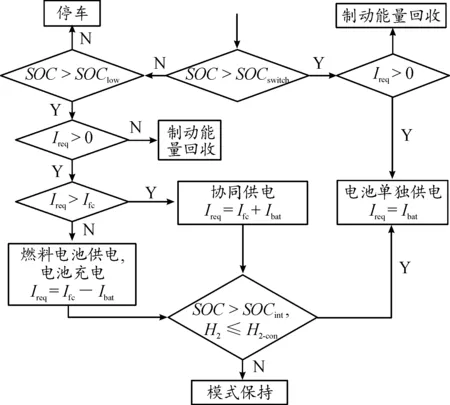
圖4 頂層控制結構示意圖
2.2 雙層模糊控制
為了實現變載限制以及變載大小控制,提出一種雙層模糊控制方法,如圖5所示。
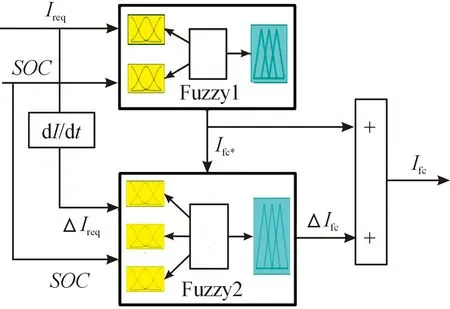
圖5 雙層模糊控制結構示意圖
第一層模糊控制以需求電流Ireq和電池SOC為輸入,輸出為燃料電池電流Ifc*,并約束Ifc*在其高效區內。第二層模糊控制的輸入為一級模糊輸出Ifc*、電池實時SOC以及需求電流變化ΔIreq,輸出為燃料電池輸出電流變化速率ΔIfc,并約束ΔIfc在5 A/s以內,即ΔIfc≤5 A/s。
如前文所述,傳統一層的模糊控制雖然對燃料電池輸出電流進行了合理控制,但未考慮燃料電池變載能力限制。在頂層控制策略中,當SOCswitch較小(≤40%),在完整的續駛里程循環中燃料電池發生啟停的次數非常少。根據式(7),由啟停和怠速帶來的耐久損耗可以忽略。另外,由于第一層模糊限制Ifc在高效率區,此時電流相對較小,由過載導致的耐久損耗也可以忽略。因此,變載是策略需要重點考慮的因素。
當檢測到第一層模糊控制(Fuzzy1)輸出的Ifc變化率dIfc>5時,第一層模糊輸出為Ifc*,第二層模糊不生效且ΔIfc=5,燃料電池最終輸出電流為Ifc=Ifc*+5。當檢測到dIfc≤5時,第二層模糊控制器生效,根據第二層模糊控制的輸入實時控制ΔIfc的大小,此時Ifc=Ifc*+ΔIfc。
這樣,燃料電池實際輸出電流變化速率能夠被限制在要求的范圍之內,同時其輸出功率大小也能被約束在高效區內。
2.3 人工蜂群算法優化過程
雙層模糊控制解決了需求電流分配的問題,同時也約束了燃料電池電流的變化范圍。然而,模糊規則及權重系數的設置均基于個人經驗,規則的制定具有很強的主觀性,控制效果也非最優。本文綜合考慮能量消耗與燃料電池耐久損耗構造了綜合能耗評價函數,如式(11):
Qcon=conhyd·Chyd/mile+Qbat·Cbat/mile+
Dfc·Cfc·Pfcmax/(mile·20)
(11)
式中:Qcon為評價指標,代表了單位里程的運行成本,conhyd為總氫氣消耗,Qbat為電池容量,Pfcmax為燃料電池最大功率,mile為續駛里程,20%為本文允許的燃料電池最大衰退百分比,當燃料電池性能衰退大于20%時,燃料電池將無法繼續使用。Chyd、Cbat、Cfc分別為氫氣價格、市電價格、每千瓦燃料電池系統價格。
本文以式(11)作為全局優化函數,并通過人工蜂群算法(artificial bee colony algorithm,ABC)進行迭代尋優,優化對象為雙層模糊控制的隸屬度函數及權重系數。優化過程如下:將各個隸屬度函數端點以及頂點依次作為ABC算法的向量,令其為(X1,X2,X3…)。同樣地,各個模糊規則的權重也作為算法的向量。圖6(a)展示了ABC優化隸屬度函數設置方法。圖6(b)為ABC尋優過程。通過商業軟件Amesim計算一次補充能源車輛需時里程,并結合氫氣消耗、燃料電池性能衰退量及電池電能消耗在Simulink中計算出單位里程運行成本,最后通過Matlab.m腳本文件不斷更新ABC雇傭蜂和引領蜂的數量及位置,直到尋找到最小運行成本。此時,對應的隸屬度函數分布以及模糊規則權重即為最終優化結果。通過離線優化的方式使隸屬度函數及權重因子不再依賴人工制定,結果更具客觀性。
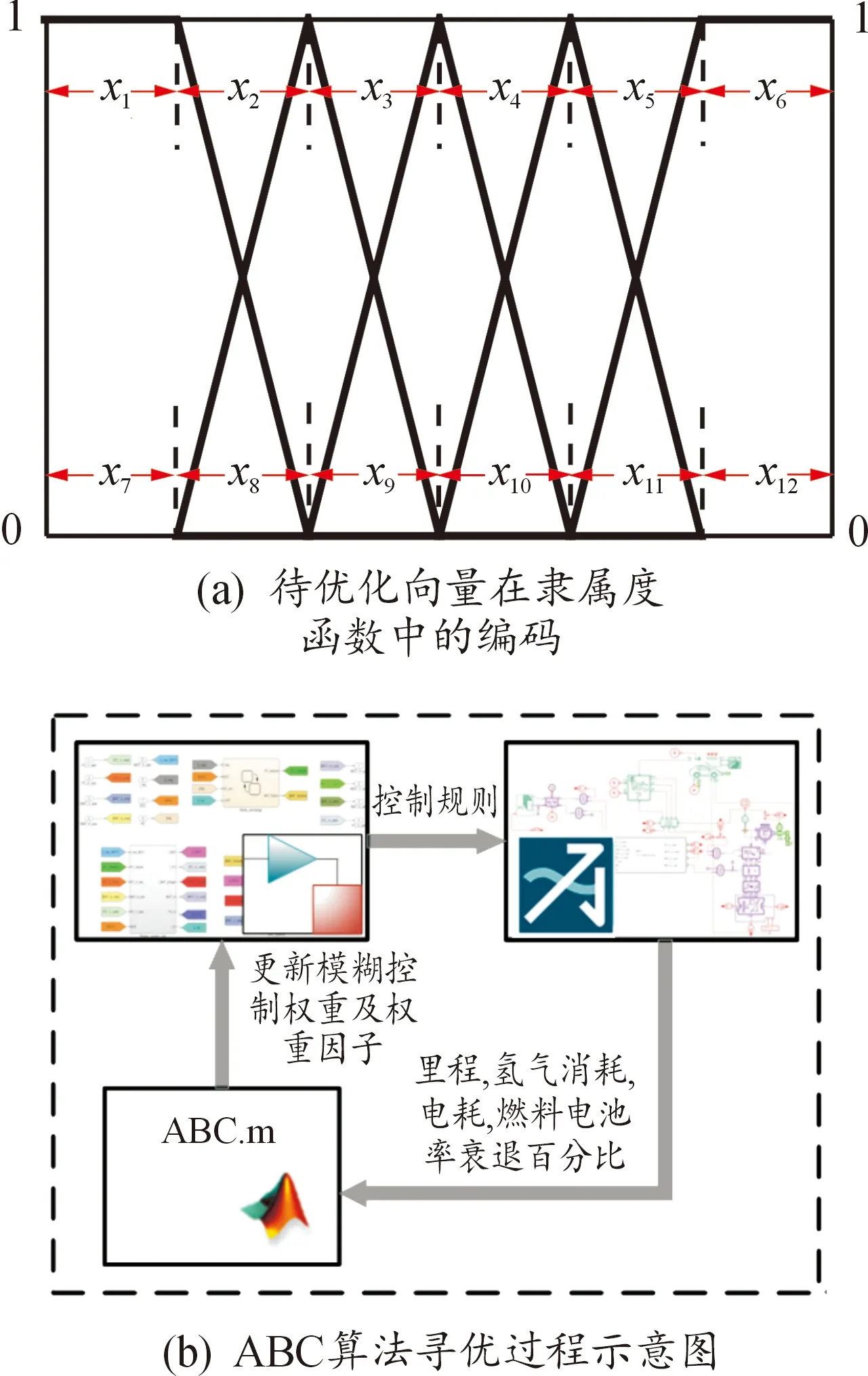
圖6 ABC算法優化原理
3 結果與討論
通過ABC算法迭代尋優的方式,找到最優的隸屬度函數分布以及模糊規則權重組合,使成本函數最低。經過1 000次迭代計算后,Fuzzy1的隸屬度函數分布以及權重因子如圖7—8所示。Fuzzy2優化的方式和Fuzzy1相同。

圖7 ABC算法優化前后的隸屬度函數
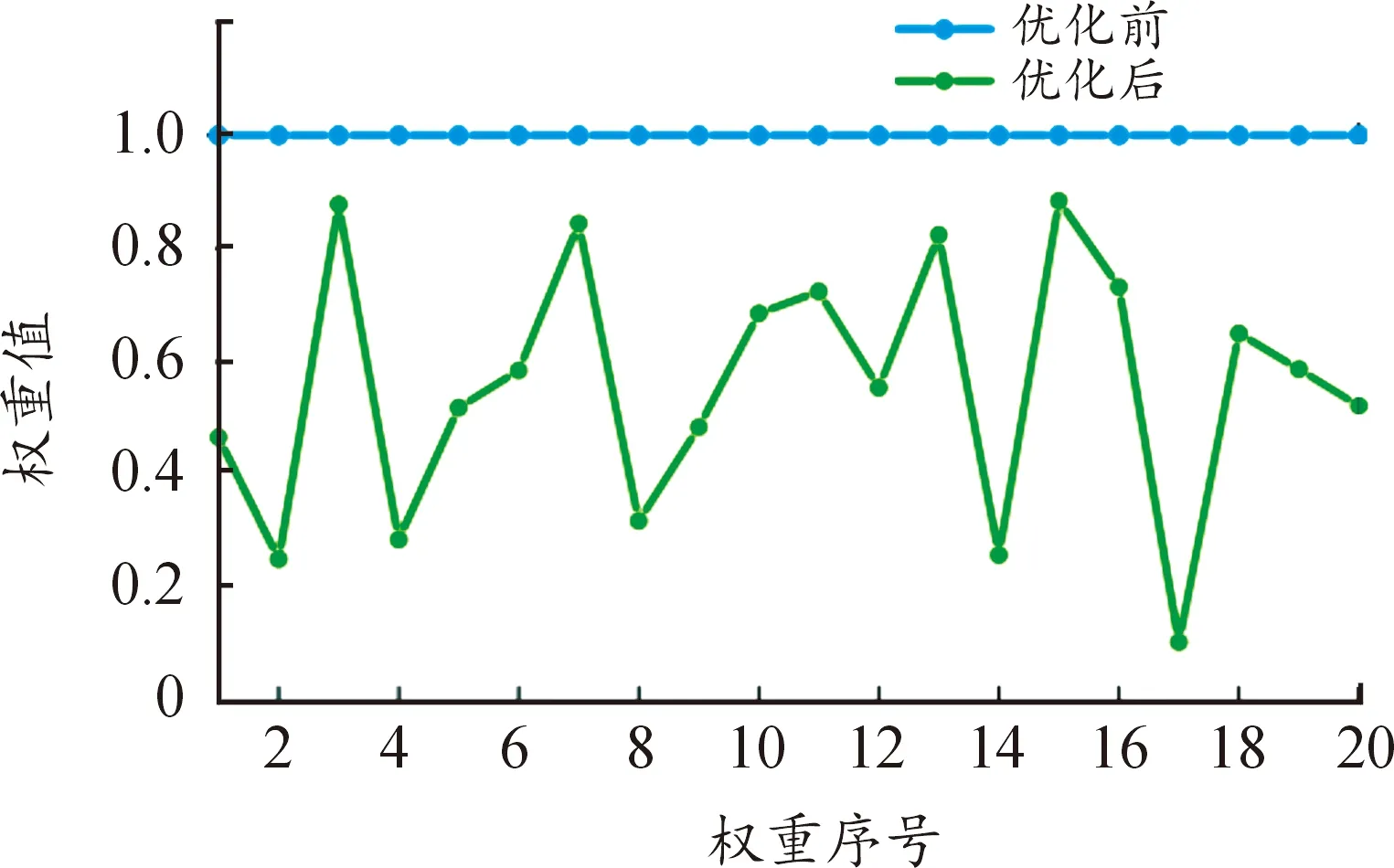
圖8 ABC算法優化前后的權重因子
為了驗證策略的可行性與優越性,本文選擇典型工況WLTP和UDDS進行仿真與優化,這2個工況都擁有較為頻繁的速度變化。圖9展示了在2種工況下的部分需求電流、電池SOC以及電池電流仿真結果。需要注意的是,在實際仿真中軟件需求電流為正或零表示車輛處于制動和滑行狀態,反之車輛處于驅動狀態。電池電流為正表示充電,反之為放電。根據圖9可知,當電池SOC較低且車輛在制動或滑行狀態下,燃料電池保持開啟為鋰電池充電,使其SOC快速回升。但由于頂層控制邏輯及雙層模糊協同控制策略,當電池SOC將要到達40%,燃料電池即將關閉時,通過控制減小燃料電池輸出電流,并增大電池輸出電流而使其SOC處于接近但小于40%的狀態,此時燃料電池不會因為到達40%而關閉,燃料電池啟停次數可以有效降低,且電池SOC波動不會太大并趨于穩定,該現象可由圖中SOC變化曲線看出。
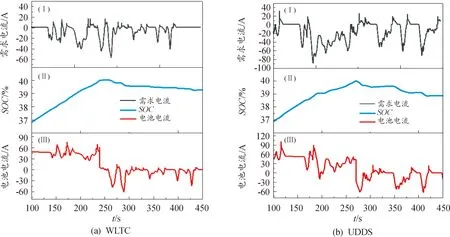
圖9 不同工況下的部分需求電流、電池SOC、電池電流曲線
圖10展示了在2種工況下的燃料電池電流及變化率仿真結果。圖10 (Ⅰ) 表示經過雙層模糊控制后的燃料電池輸出電流變化率ΔIfc的變化趨勢。由圖可以看出,燃料電池電流變化率可以被約束在5 A/s的范圍內。圖10(a) (Ⅱ)及圖10(b) (Ⅱ)為經過人工蜂群算法優化前后的燃料電池實際輸出電流。可以看出,當ΔIfc較大時,第二層模糊控制開始起作用,限制了燃料電池輸出電流的變化速率。尤其是在負載增大時,燃料電池輸出電流并沒有跟隨負載快速增大,而是被限制在5 A以內,并由電池承擔了負載增大的部分。在滿足變載要求的前提下,降低了燃料電池系統電流變化速率,這對提升燃料電池耐久性是有利的。

圖10 不同工況下燃料電池電流及變化率曲線
進一步的仿真中,WLTC工況下,優化前后的續駛里程分別為238.12、264.79 km。UDDS工況下,優化前后的續駛里程分別為287.72、313.08 km。可以看出,雙層模糊控制在優化燃料電池變載速率的同時,提升了整車經濟性。這也間接說明,基于成本函數優化的模糊控制是優于基于人工經驗的模糊控制的。
4 結論
本文提出了一種雙層模糊控制方法,降低了燃料電池變載速率,提升了燃料電池系統耐久性。通過ABC優化算法,尋優最佳隸屬度函數分布以及模糊規則權重組合,降低了總運行成本。首先通過臺架試驗的方式獲取了燃料電池輸出特性及實際變載能力,搭建了燃料電池耐久模型。其次提出了雙層模糊控制策略,第一層模糊控制將電池SOC與需求電流作為模糊控制的輸入,動態調整燃料電池輸出電流并將其限制在系統高效率區內,第二層模糊控制將燃料電池變載速率控制在變載能力以內,同時降低燃料電池的耐久損耗。最后通過ABC算法優化雙層模糊控制的隸屬度函數及權重系數。本文采用理論建模與仿真計算相結合的方式驗證了上述策略的可行性。仿真結果表明:所提出的雙層模糊控制策略能夠在保證經濟性的前提下限制燃料電池的變載速率,降低耐久損耗,在WLTC與UDDS典型工況下,能夠優化續駛里程,優化比例分別為11.2%、8.79%。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45