多通道特征融合卷積神經網絡的齒輪箱故障診斷
2022-10-12 04:15:40張名武李舜酩程龍歡
重慶理工大學學報(自然科學) 2022年8期
張名武,李舜酩,2,程龍歡
(1.南京航空航天大學 能源與動力學院, 南京 210016;2.南通理工學院 汽車工程學院, 江蘇 南通 226002)
0 引言
齒輪箱作為機械傳動系統的重要核心部件,越來越受到我國科技部門的重視[1],在日常機械設備上也得到廣泛應用。齒輪箱中的齒輪、軸承等部件因為其運轉時間長、工作環境復雜,加之受到潤滑、溫度等因素影響,齒輪會發生斷齒、磨損、點蝕故障,軸承的內圈、外圈和滾動體也會損壞。齒輪箱長時間工作運轉會使得損傷不斷積累,當發生故障時,導致機械設備的損壞,甚至誘發工業事故,造成巨大的經濟損失和人員傷亡。
齒輪箱故障診斷流程通常包括3個部分,信號獲取及處理[2]、故障特征提取[3]和故障類型診斷。齒輪箱的振動信號包含故障件在運行狀況下的大量特征,經常作為不同故障診斷模型的輸入信息。傳統的故障特征提取方法[4]依賴于人工的經驗且提取的特征效果有時并不明顯,深度學習和人工神經網絡的提出有效地解決了傳統齒輪箱故障診斷方法的弊端。卷積神經網絡(convolutional neural network,CNN)作為典型的深度神經網絡,憑借較強的特征提取能力[5]被廣泛應用于圖像識別、語音識別和目標跟蹤等方面,也有學者成功地將卷積神經網絡應用在機械故障診斷中。基于信號處理技術和CNN模型相結合的故障診斷方法[6-7],診斷效果好壞依賴信號處理特征的質量,增加了故障分析的不確定性,降低了深度學習的智能性。改造CNN模型直接提取振動信號的特征能更加準確地反映機械設備的健康狀態[8-9],但是CNN模型直接對一維振動信號進行處理分析時,原始序列的空間相關性會被破壞,故障的相關信息會缺失。此外,使用單通道CNN進行故障診斷,雖然可以減少網絡參數,但沒有充分發揮CNN提取信號特征的能力,不能充分挖掘設備故障特征信息。
針對上述問題,本文嘗試建立一種MC-FFCNN的模型并將其應用在齒輪箱故障診斷上,該方法不僅完全不依賴于人工特征提取和專家知識,而且不同轉速下的故障診斷準確率均較高,比未融合的數據網絡更高。
1 格拉米角場數據增維
在智能故障診斷方面,如果能夠將一維序列數據轉化為二維數據(灰度圖像),那么可以起到很好的故障診斷效果[10]。目前,轉換為二維數據的主要方法有格拉米角場方法等。本文使用格拉米角場進行數據增維,其原理簡單且計算量較小。
1.1 格拉米角場原理
格拉米角場將一維序列數據縮放,再從直角坐標系統轉換到極坐標系統,然后考慮不同點之間的角度和或者角度差以識別不同時間點的時間相關性。角度和、角度差對像素值數據的規律性影響幾乎一樣,本文選擇角度和(gramian angular summation field,GASF)做角度變換。
1.2 格拉米角場的實現步驟
格拉米角場的實現步驟如圖1所示。首先,對一維序列數據做歸一化處理,利用minmax歸一化方法將一維數據映射到[0,1];其次,將縮放后的時間序列數據在極坐標中轉換,即將數值看作夾角余弦值;然后,對在極坐標中轉換后的角度數據做角度和變換。如果原始時間序列數據的長度為2n,經過GASF轉換后,得到了尺寸為[2n,2n]的矩陣;接著采用分段聚合近似(piecewise aggregation approximation,PAA)的方法將序列長度減小,平均將每個段內的子序列壓縮為一個數值。
經過分塊后的矩陣減少了計算量,并且保留了原有的信號特征。這些矩陣數據的數值在[-1,1]之間,可以作為振動故障信號的灰度圖數據。

圖1 格拉米角場增維
2 MC-FFCNN智能故障診斷算法
MC-FFCNN網絡屬于卷積神經網絡的一種,其結構包含卷積層、池化層、全連接層以及Softmax分類層,在最后一層池化層和全連接層間加入融合層。MC-FFCNN智能故障診斷算法的主要結構包括2個部分:信號擴維和神經網絡診斷模型。
2.1 信號擴維
多個傳感器獲取的故障數據,采用格拉米角場擴維成二維矩陣數據,將這些數據作為灰度圖的像素值,從多個通道輸入到神經網絡中。多傳感器采集的振動信號輸入模型如圖2所示。

圖2 多傳感器采集的信號輸入模型
2.2 MC-FFCNN故障診斷模型
MC-FFCNN故障診斷模型包含3層卷積層、3層池化層、1層融合層,最后用全連接層以及Softmax回歸對融合結果進行故障分類。
3層卷積層以滑動窗口的形式提取原始數據特征,卷積核以一定規則與圖像上相應區域的數據做卷積運算,當所有區域計算完成后,所有數據的特征都被提取出來。3層最大池化層可以保留計算目標的關鍵信息,去除冗余信息,降低神經網絡的計算量。最后一層池化層提取灰度圖特征后,在融合層中采用加權融合方法融合特征信息。對于振動信號的二維數組,由于各個通道提取的特征圖存在差異,每個通道對特征圖的貢獻度也不一樣,采用信號峭度值來衡量每個通道的貢獻度及權重。全連接層是將融合層的結果進行整合處理,每個連接可以有不同的權重參數。它的作用是將前面卷積層和池化層提取的目標關鍵特征進行整合。分類器Softmax回歸是一種指數函數,可以實現歸一化。因為它以概率的形式展現,所以針對不同的故障類型,可以達到較好的分類效果。決定卷積神經網絡模型迭代計算參數更新快慢的是激活函數。常用的激活函數有Sigmoid函數、tanh函數、ReLu函數和Leaky ReLu函數。Sigmoid函數是便于求導的平滑函數,但是運算耗時間。Tanh函數解決了Sigmoid函數的非zero-centered問題,但是它存在梯度消失和冪運算的問題。ReLu函數收斂速度比Sigmoid和tanh函數快,計算難度低,不需要進行指數運算。Leaky ReLu函數解決了ReLu函數帶來的神經壞死的問題,但其表現并不穩定。本研究中選擇ReLu函數,所使用的卷積神經網絡的拓撲結構如圖3所示,卷積神經網絡參數如表1所示。

圖3 卷積神經網絡拓撲結構

表1 卷積神經網絡參數
其中,c是故障的數量,m是通道數,F是卷積核的數量,f1是卷積核的形狀,s是步長,P是池化層的形狀,W1,W2和W3分別是各個通道的權重,Kp表示全連接層層數。
數據融合[11-12]包含了3種融合方式,分別是數據級融合方式、特征級融合方式和決策級融合方式。本文在融合層使用了特征融合的方法。多通道的特征融合方式如圖4所示。相比于單通道的振動信號處理效果,多通道的灰度圖融合可以全面地表達故障特征。融合后的特征圖每個位置的像素值為3個通道融合前的特征圖相應位置的像素值與其分配權重乘積之和。

圖4 多通道的特征融合方式
3 試驗
本文試驗中錐齒輪箱傳動試驗臺如圖5所示。傳感器布置方式如圖6所示,3個接觸式加速度傳感器獲取輸入軸、中間軸、輸出軸的振動信號。

圖5 錐齒輪箱傳動試驗臺

圖6 錐齒輪箱傳感器布置方案
3.1 故障標簽
選取的數據有10種,分別用C1—C10表示,10種數據包括齒輪箱正常、內圈裂紋、外圈裂紋、齒輪斷齒、齒輪點蝕(4個)、齒輪點蝕(6個)、齒輪裂紋(0.25倍齒厚)、齒輪裂紋(0.5倍齒厚)、齒輪磨損(0.4倍齒厚)和齒輪磨損(0.8倍齒厚)。
3.2 參數選取
學習率是訓練網絡的重要參數,訓練剛開始時,使用較大的學習率可以加快訓練速度,訓練到達一定程度后使用較小的學習率可以提高精度。設定初始學習率為0.001,當迭代次數大于12時,測試的準確率增長變得緩慢,為了提高測試的精度,將學習率調低至0.000 8。當迭代次數超過30時,網絡的測試準確率已經穩定。設定每一次訓練測試的迭代次數為30次,在迭代次數12及以下時,學習率為0.001,在13次到30次之間,學習率為0.000 8。
峭度值對大幅值敏感,可以作為一個權重指標,融合層的權重可以根據每個傳感器的原始數據的峭度值特征而確定。
3.3 故障診斷結果
選取試驗中700、900、1 100、1 300 r/min的試驗數據,將圖像數據導入搭建的卷積神經網絡融合模型和未融合的卷積神經網絡模型,可以得到各轉速下的測試準確率,如表2所示。
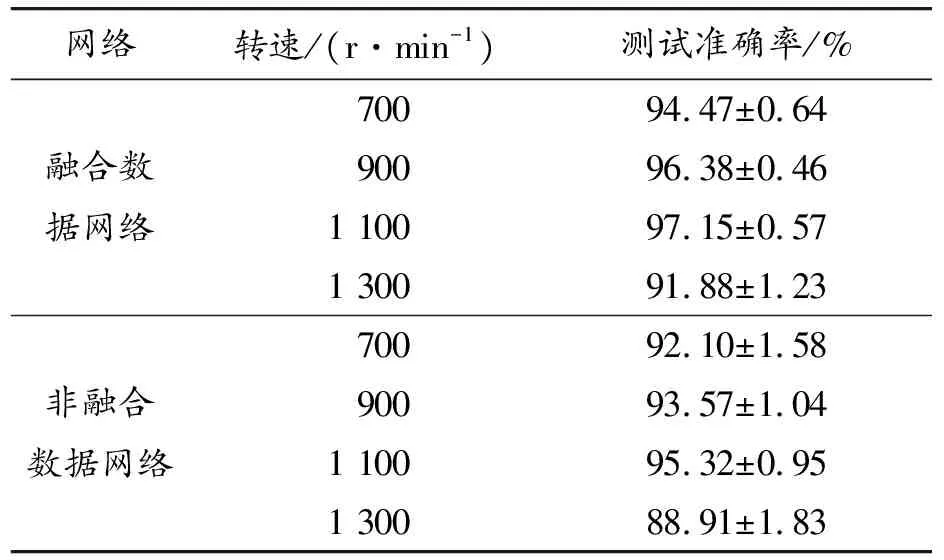
表2 不同網絡各轉速下的診斷準確率
在同樣的轉速數據集中,融合數據的網絡診斷準確率比非融合數據網絡高,且不同轉速的故障診斷的準確率波動也較小,這表明本文提出的融合數據網絡的優越性。另外,同一網絡診斷準確率最好的是1 100 r/min,最差的是1 300 r/min,另外2種轉速的準確率次之。這是因為電機的額定轉速是1 500 r/min,1 300 r/min是最接近的,對數據的采集影響較大,轉速太低獲取的數據也有一定影響。
故障準確率雖然可以反映模型的整體診斷效果,但是不能反映每種故障的診斷情況。混淆矩陣可以將不同類型的故障的診斷效果在一張圖中表示出來。圖7是轉速為700 r/min時融合模型的混淆矩陣,700 r/min的C2的真實標簽和預測標簽相似度最高,可達0.97。C1的真實標簽和預測標簽相似度最低,只有0.87,預測的標簽存在誤判為C4、C5、C6、C8的情況。圖8是轉速為700 r/min時未融合模型的混淆矩陣,其網絡診斷的效果要差一些。在700 r/min轉速下,未融合神經網絡的C2、C5、C6、C7、C8和C10的診斷準確率均低于融合神經網絡的診斷準確率。

圖7 700 r/min轉速下融合模型的混淆矩陣

圖8 700 r/min轉速下未融合模型的混淆矩陣
采用故障分類圖可以直觀地展現單個故障間的聚類情況以及各個故障間的分類情況。700 r/min 轉速下融合數據與未融合數據結果的故障分類圖如圖9和圖10所示。
圖9和圖10的橫縱坐標都是表示降維到二維的數據特征,不同的顏色代表不同類別的故障標簽,每一種顏色可以清晰地展現單個故障內的聚類程度,不同顏色間也可以明確地區分不同故障間的差異。

圖9 700 r/min轉速下融合模型的聚類圖
在700 r/min轉速下,在未融合數據集的分類結果中,C1和C8有較多的重合,這也間接說明了C1和C8的故障診斷準確率低,另外,C3和C7,C4和C6有較少的交叉,這也導致了這些標簽間的匹配問題。在融合數據集的分類結果中,除了C2和C5之間會有部分的交叉影響,其他的故障標簽之間都是有某1個或2個樣本的跳動,對故障診斷的結果影響很小。
4 結論
1) 對原始振動信號采用了格拉米角場增維處理,處理后的矩陣元素數值均為0到1之間的數,不僅保持了原有信號的時序性,還可以加快訓練網絡的收斂性。
2) 采用了多通道的卷積神經網絡模型,克服了單個傳感器信號不能全面反映故障特征的弊端,將多個信號通過圖像轉換后的圖片作為卷積融合神經網絡的輸入,有效提高了故障診斷的準確率。
3) 該模型充分利用了CNN的特征提取能力,能夠準確識別齒輪箱數據的10種不同故障狀態,相較于單通道CNN的故障診斷方法,本文提出的基于MC-FFCNN模型的齒輪箱故障診斷方法準確率更高。
下一步的研究重點為研究模型參數對診斷結果的影響,提高算法的運算效率。
猜你喜歡
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
機械與電子(2014年1期)2014-02-28 02:07:31