一種新型水下垃圾打撈機器人設計
2022-10-12 08:05:40郭志明陳子暄戴娟龔雄曾廣勝
長沙大學學報 2022年5期
郭志明,陳子暄,戴娟,龔雄,曾廣勝
(長沙學院機電工程學院,湖南 長沙 410022)
隨著工業化和城市化進程的推進,海洋環境污染問題也越來越嚴重,絕大部分陸地垃圾污染物通過各種途徑最終進入海洋。這些有害物質進入海洋環境而造成的污染,會損害生物資源,危害人類健康。據估算,每天約有八百萬件垃圾被排放到海洋中,預計到2025年,海洋塑料垃圾的數量相比2010年將增加一個數量級[1]。當前海洋環境中的垃圾以塑料垃圾為主,由于塑料垃圾在水中難以自然降解,進入海洋中的塑料垃圾至少能夠保留數百年,不僅會威脅海洋環境,還會逐步進入食物鏈中,對生物資源造成巨大危害[2-3]。
目前針對水下垃圾的清理方式主要包括人工打撈和機械打撈[4]。人工打撈不僅成本高、效率低,還具有一定的危險性。而機械打撈則主要是以垃圾清理船為主的機械產品在人工的遙控指揮下進行清理。例如劉伯運等研制的MC120號水面清潔船,采用雙螺旋筒式推進裝置,可通過遠程遙控的方式實現對水面垃圾的快速清理[5];嚴蘇豫等設計的一種水上垃圾清理船,可通過垃圾收集裝置實現對油類垃圾和固體垃圾的分類清理[6];張國洲等研發的雙體船式水面垃圾清理機器人,依靠水泵提供動力,使垃圾自動流入艙體,實現水域清理[7]。
上述垃圾清理船主要適用于近海、江河等水域中,體積較為龐大,制造成本較高,難以應用在中小型水域中。因此,為機動解決湖泊、池塘等中小型水域中垃圾污染的問題,我們設計了一款新型水下垃圾打撈機器人。該機器人三維結構如圖1所示,采用了框架式外形設計,搭載了膠囊式耐壓艙、圖像采集裝置等,能夠快速高效地執行水下作業,針對中小型水域中的塑料垃圾進行準確識別和打撈。
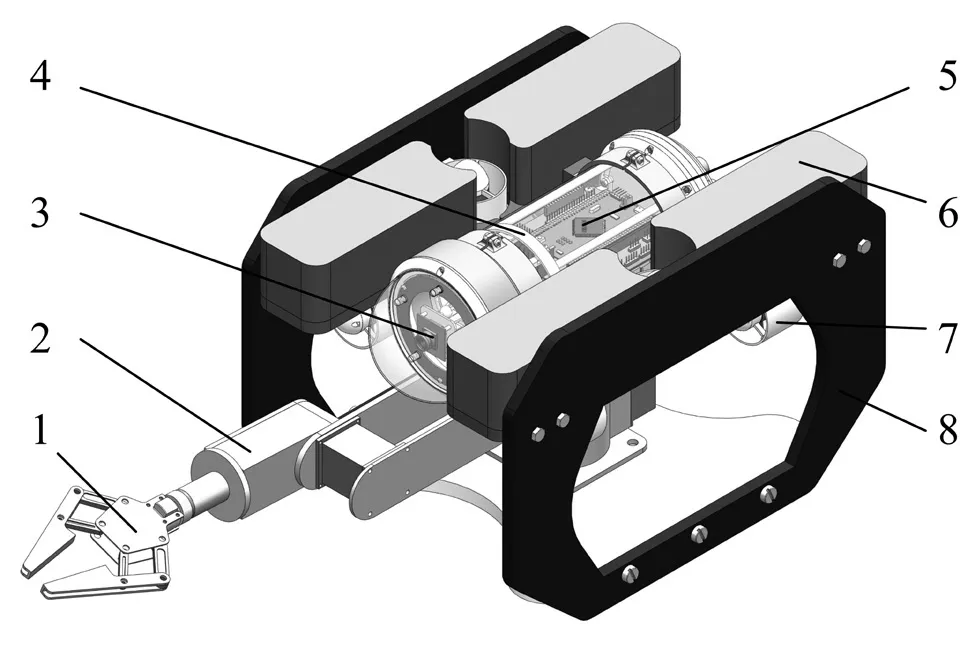
圖1 水下機器人三維結構
1 機器人整機結構設計
我們所設計的水下打撈機器人在外形上采用了框架式概念設計,總長684 mm,總寬275 mm,總高256 mm,主要由水下驅動裝置、圖像采集裝置、水下打撈裝置以及膠囊式耐壓艙構成(見圖1)。
為了防止機器人在工作過程中出現損壞,電子控制模塊和照明等元器件被安裝在膠囊式耐壓艙中,耐壓艙固定在框架中心。耐壓艙前端安裝了攝像頭,用于提供工作視野,后端設計了臍帶纜接口,在工作時可通過臍帶纜與母船進行連接,從而進行遠程控制與數據傳輸。耐壓艙的正下方安裝了水下打撈裝置,包括一個三自由度水下機械臂,可進行大范圍轉動,同時在機械臂末端裝配了夾持式機械手,可實現對水下垃圾的打撈清理。
在機器人的工作過程中,我們首先在母船上通過耐壓艙后端連接的臍帶纜向控制模塊發出信號使推進器啟動,保證機器人平穩下潛,調整作業深度后,開啟耐壓艙前端的攝像頭進行水下圖像采集,必要時可啟動攝像頭周圍的LED燈環進行補光,采集到的圖像信息可通過尾部的臍帶纜傳輸給水面上的母船。當發現需要打撈的垃圾時,母船向控制模塊發出信號,控制機械臂運動至合適位置,指揮機械手進行抓取,成功抓取垃圾后,再控制機器人上浮至水面進行垃圾回收。
我們通過調整機器人自身重量、浮力和推進力等影響因素,確保機器人在水下處于相對平衡狀態,從而能實現平穩運動。由于機器人整體上配置了較多機械結構裝置,自身重力較大,易沉入水中,需要選擇合適的材料來產生浮力。我們采用輕質、高強度材料制作耐壓艙,這樣可以有效增加機器人的浮力,但若只用耐壓艙的殼體產生機器人的浮力,必然要增加殼體體積,增大流動阻力,因此要在機器人框架式結構上布置合適的浮力材料。
目前大部分機器人采用人工合成的固體材料來提供浮力,這主要是將玻璃微球以一定比例填充到環氧樹脂中,在合適的溫度、壓力下經反應合成的復合材料。相比于其他浮力材料,這種材料密度低、承受靜水壓強能力好、彈性模量與海水相近。我們所設計的新型垃圾打撈機器人根據工作環境與水深條件,選用牌號為CFC-400的固體材料,布置在耐壓艙周圍,為機器人提供必需的浮力。該材料主要參數如表1所示。

表1 浮力材料參數
2 機器人關鍵部件設計
2.1 膠囊式耐壓艙設計
機器人在水下作業的過程中會受到靜水壓力和流動阻力等多種載荷。耐壓艙作為主要承壓部件,能夠保護電控模塊,為機器人在水下作業提供密封和安全保障[8],因此需要設計合理的耐壓艙結構,保證機器人水下工作時的安全。
圖2為機器人耐壓艙的結構,為了減少流動阻力,同時最大程度利用內部空間,耐壓艙外形采用膠囊式結構,即采用圓柱形內部艙室與半球形封頭組合。在艙室前端采用了螺栓將前透明罩、前部支架與前圈固定,后端采用螺釘將后圈、尾部支架、尾蓋固定。

圖2 水下機器人耐壓艙結構
艙室內部安裝了支撐桿與環形支架,可承受較大靜水壓力和撞擊力等,有效提高了艙體的結構強度。圓柱形艙室設計了半圓形凹槽,并裝配了O形密封圈進行旋轉密封,以保證內部控制模塊能夠正常工作。
2.2 水下驅動裝置設計
為保證機器人在水下正常推進和沉浮,同時補償機械手在工作過程中產生的擾動使其保持穩定,必須配置高效可控的驅動裝置。我們設計的機器人的驅動裝置主要由耐壓艙周圍布置的水下推進器和中間的控制模塊組成,如圖3所示。機器人總共有6個水下推進器,在外部框架上成對布置,通過推進器之間的協同作用使機器人在水下完成不同動作。其中,推進器3、4垂直安裝在耐壓艙兩側,當它們以相同速度轉動時,機器人可實現上浮、下沉動作,差速轉動時可實現翻轉動作;推進器1、2、5、6水平安裝在機器人框架下方,當它們以相同速度轉動時,機器人可實現前進、后退,差速轉動時可實現機器人的轉向。考慮到制造難度和應用場景,我們選用了螺旋槳式推進器。每個推進器的內部都安裝了直流電機,通過控制電機的正反轉即可實現螺旋槳順時針、逆時針的轉動。

圖3 水下推進器布局
2.3 圖像采集裝置設計
機器人的圖像采集裝置主要由耐壓艙前部的攝像頭、二自由度云臺、LED燈環組成。攝像頭用于拍攝水下雜物,LED燈環用于補光,二自由度云臺則用于改變攝像頭的拍攝角度,減小工作時的視野盲區。
傳統的水下機器人往往采用固定式攝像頭的設計,通過控制機器人的移動來采集圖像。這樣的設計對機器人的運動控制系統要求較高,并且攝像視野有限,在實際應用中易出現較大的視野盲區。而云臺可使攝像頭繞固定軸線轉動,為機器人提供更廣泛的視野。考慮到耐壓艙的內部空間有限,一般的云臺難以放置[9],我們設計了一種新型二自由度攝像云臺,如圖4所示。
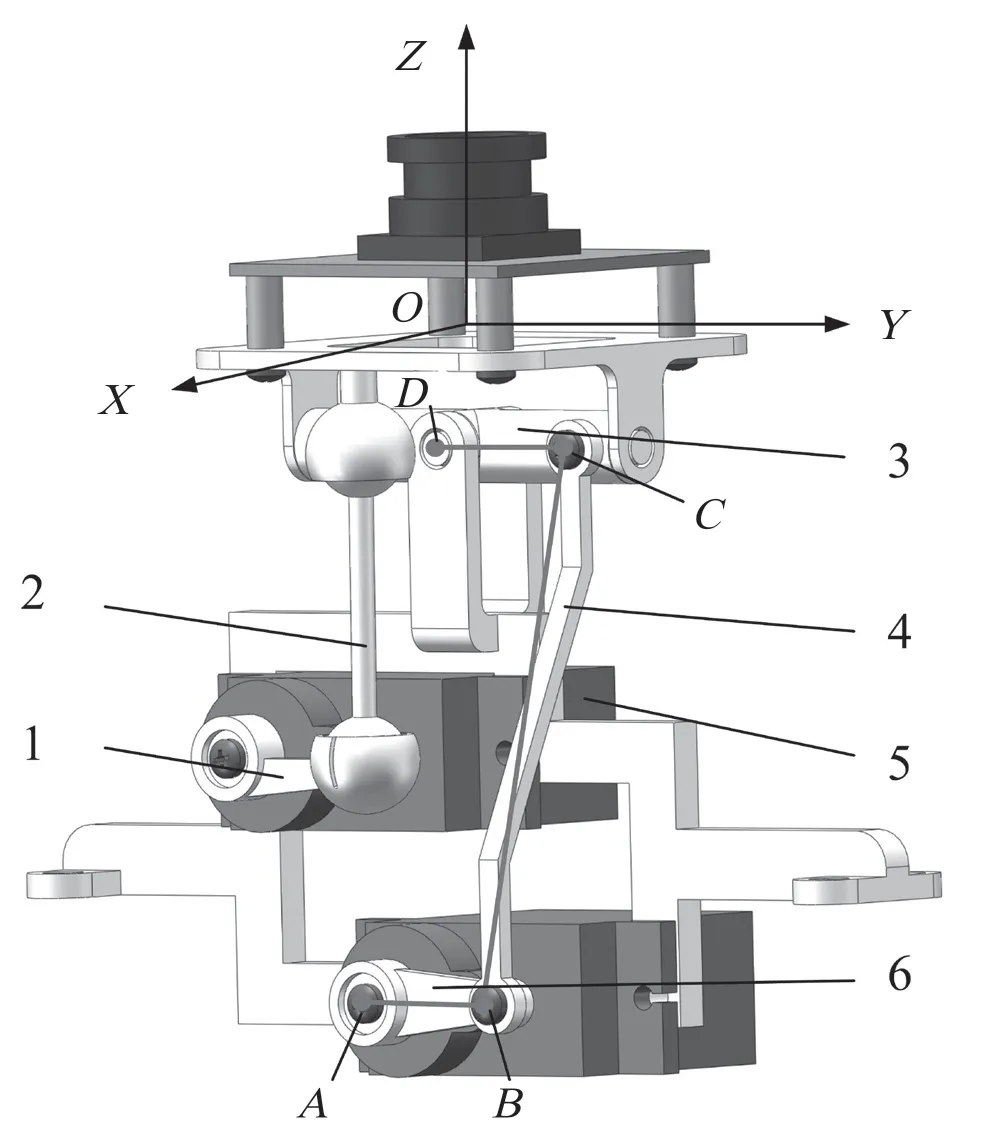
圖4 二自由度攝像云臺結構
為保證攝像頭能夠實現復雜的空間轉動,我們采用機構學中并聯機構的形式進行設計,即將動平臺(攝像頭)與定平臺(機架)采用兩個獨立的運動鏈相連接。如圖4所示,搖桿3、連桿4、下曲柄6之間通過鉸鏈連接,在平面上組成曲柄搖桿機構,通過舵機驅動下曲柄6的轉動可實現攝像頭在YOZ平面上進行90°擺動。為避免發生運動干涉,在上曲柄1與連架桿2以及攝像頭平臺之間均采用球面副連接,通過舵機驅動上曲柄1的擺動即可實現攝像頭在XOZ平面上進行90°擺動。水下機器人在實際應用中,可以通過控制上曲柄1與下曲柄6的協同作用,使攝像頭完成復雜的空間運動,進一步減少其視野盲區。
由于攝像頭的擺動幅度與各桿長度有關,為保證攝像頭的擺動幅度盡可能大,獲得更大的工作視野,需要確定各桿最優長度。下面將對組成攝像云臺的兩個獨立桿組的尺寸進行計算分析。
2.3.1 下曲柄、連桿、搖桿長度計算
圖5即為二自由度攝像云臺中下曲柄6、搖桿3、連桿4組成的曲柄搖桿機構運動示意。假設其中,曲柄AB為原動件,在其轉動一周過程中會出現兩次曲柄AB與連桿BC共線的情況,此時搖桿CD分別處于兩極限位置C1D和C2D,原動件AB所在兩個位置之間所夾銳角θ為極位夾角,搖桿CD所在兩個極限位置之間所夾角φ為擺角。由圖5中幾何關系可知:
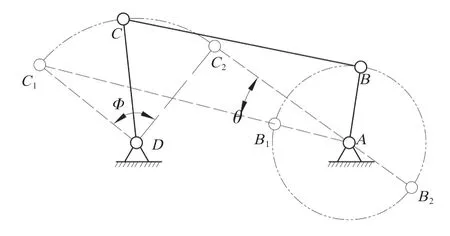
圖5 攝像云臺中的曲柄搖桿機構運動示意
即有:
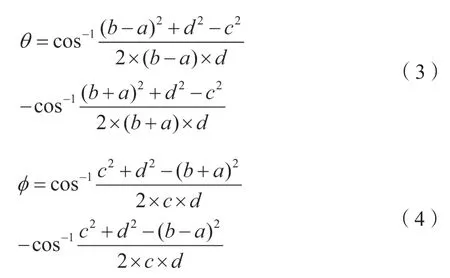
曲柄搖桿機構具有急回運動特性[10],則有:

其中,K為行程速比系數,θ為極位夾角。極位夾角決定著機構的急回運動特性。θ越大,K越大,急回運動越明顯,攝像頭擺動效率越高,所以在設計過程中應保證極位夾角盡可能大。
在圖5所示機構ABCD中,令lBC為最長桿,lAB為最短桿,搖桿lCD= 17.5 mm,機架lAD= 55 mm。為滿足曲柄搖桿機構的桿長條件,則有:

同時為保證lCD能夠在平面上進行90°往復擺動,擺角φ取為90°,帶入式(4)中,得:

通過MATLAB編程計算滿足桿長條件式(6)以及擺角約束式(7)時,當lAB= 10.1 mm,lBC= 47.6 mm時,極位夾角θ達到最大,為17.6°。此時,lCD擺動效率最高。
故 圖4中,l下曲柄=10.1 mm,l連桿=47.6 mm,l搖桿=17.5 mm。
2.3.2 上曲柄、連架桿長度計算
在攝像云臺的實際裝配中,圖4中的上曲柄與下曲柄均作為舵機搖臂,由舵機直接驅動。為保證設計簡便,設定舵機搖臂長度相同,即l上曲柄=l下曲柄=10.1mm。由于空間連桿運動的復雜性,難以直接求解桿長,故通過SolidWorks對攝像云臺結構進行建模,通過模擬分析得到連架桿長度。經不斷建模優化后最終確定,l連架桿=33.7 mm時,可使攝像頭在另一垂直平面上進行90°往復擺動。
綜上可得到攝像云臺各構件尺寸,如表2所示。
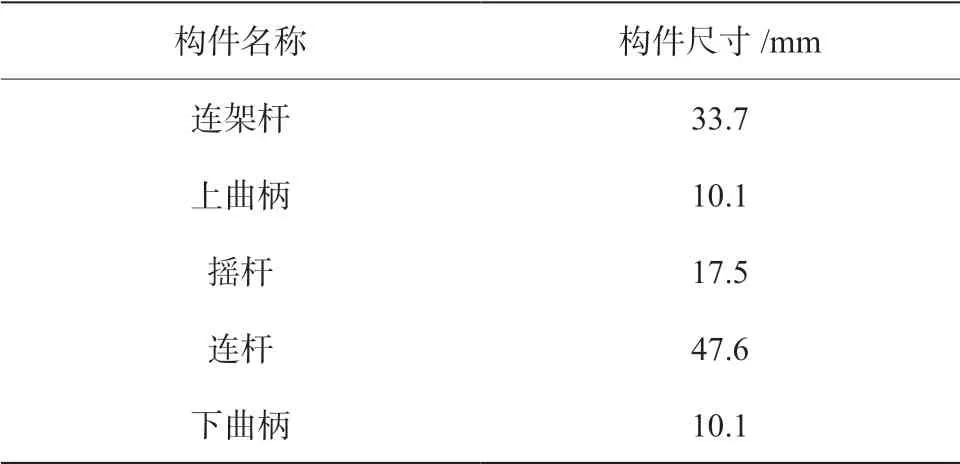
表2 攝像云臺各構件尺寸
2.4 水下打撈裝置設計
機器人的水下打撈裝置主要由三自由度水下機械臂和末端的夾持式機械手組成。機械臂是水下打撈裝置中重要的運動機構,通過各關節的轉動配合調整機械手的位置,再通過控制機械手的夾持實現對物品的打撈。
為了將機械手運動到指定位置,水下機械臂需要具備一定的自由度。我們綜合考慮選擇了“4功能”,即“三自由度+機械手”組成的水下機械臂作為設計目標。如圖6所示,水下機械臂主要由基座5、大臂4、小臂2以及末端的機械手1組成。在基座處安裝了直流伺服電機,使大臂以及之后的部分能在X1O1Y1平面上轉動。同樣地,在大臂間的套筒內部以及小臂內部也安裝了直流伺服電機,使小臂及之后的部分能在X2O2Z2平面上轉動、機械手能繞著Z3軸轉動。

圖6 機械臂結構
機器人的機械臂中各關節轉動角度參數如表3所示。

表3 機械臂各關節轉動參數
為保證機器人的順利作業,我們在機械臂末端安裝了一個夾持式機械手。如圖7所示,機械手末端安裝了驅動電機8,通過電機固定座7與絲杠相連,絲杠帶動傳動螺母5沿著絲杠軸線直線運動,再帶動連桿6轉動,從而實現折桿1的擺動。由于折桿1、機械手指3、連架桿2構成平行四邊形機構,折桿1擺動時,連架桿2會進行同步擺動,從而驅動機械手指3實現平行對捏運動。
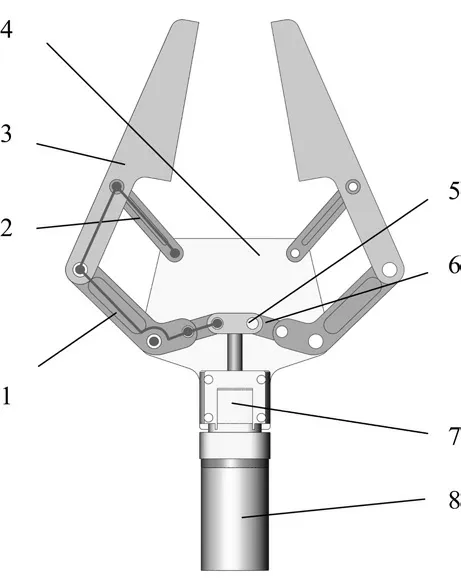
圖7 夾持式機械手結構
考慮到機械手結構上的對稱性,只需對其左側機構進行分析即可確定機械手各桿長度及運動參數。
圖8為機械手左側機構運動示意,圖中機構可視為偏心曲柄滑塊機構與曲柄搖桿機構的串聯,其中滑塊為主動件。為保證機械手指能夠實現平行對捏運動,在上方曲柄搖桿機構中,令,使之成為平行雙曲柄機構。在下方偏心曲柄滑塊機構中,取偏距為如圖8中虛線表示機械手指在運動過程中的初末位置,鉸鏈E運動的水平距離X即為單個機械手指的捏合距離。
所以,上述幾何參數應滿足關系式:

令e=5 mm,lAB=a=10 mm,lBC=b=15 mm,機械手捏合2距離H=60mm則代入上式可得,擺動角度θ2= 84.7°,lAD=lEF=l2= 33.1 mm。由上方推導知l1大小不影響捏合距離與擺動角,為保證結構的合理性,取lAF=lDF=l1= 30 mm。
綜上分析可得,圖7所示夾持式機械手最大張開距離為60 mm,最大擺動角度為84.7°。
3 結論
我們針對當前海洋塑料垃圾污染問題,設計了一款新型膠囊框架式水下垃圾打撈機器人,主要包括膠囊式耐壓艙、螺旋槳式推進器、寬視野攝像裝置和抓取執行機械手。此外,基于機械原理對攝像云臺和機械手機構進行了運動分析。主要結論如下。
(1)設計的機器人可實現水下的前進、后退、上浮、下沉、翻轉等運動,有效提高了機器人的靈活性。通過將攝像頭與曲柄連桿機構和球面副連桿并聯,設計了一種二自由度攝像云臺,使攝像頭能夠在兩個垂直平面內完成90°擺動,有效減少了水下機器人工作時的視野盲區。
(2)水下打撈裝置主要由三自由度機械臂與夾持式機械手組成。機械臂的各關節能在一定角度內轉動,從而使機械臂實現大范圍的空間擺動。在機械臂的末端安裝了機械手,能夠配合攝像裝置實現對水下垃圾的識別和清理打撈。通過對機械手機構的運動分析,可得機械手最大張開距離為60 mm,最大擺動角度為84.7°。
猜你喜歡
電腦報(2020年35期)2020-09-17 13:25:53
現代裝飾(2020年7期)2020-07-27 01:27:42
當代工人(2020年8期)2020-05-25 09:07:38
流行色(2020年1期)2020-04-28 11:16:38
電腦報(2019年40期)2019-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
科技知識動漫(2016年8期)2016-07-29 20:40:09
