空氣-磁流變液半主動型動力吸振器的研究
2022-10-13 09:27:12李浩田王海芳李凌軒陳曉哲
機床與液壓 2022年18期
關鍵詞:質量
李浩田,王海芳,李凌軒,陳曉哲
(東北大學秦皇島分校控制工程學院,河北秦皇島066004)
0 前言
在工程中,如食品包裝、船舶制造、車輛工程,需要可以實現較大振幅削減的帶寬制振方法。動力吸振器是常見的制振方法。
動力吸振器分為三類:被動型動力吸振器、半主動型動力吸振器、主動型動力吸振器。被動型動力吸振器,如張震坤等研究的鼠籠式調諧質量阻尼器,具備簡單的結構,但不具備帶寬制振能力;半主動型動力吸振器,如郎君等人研究的半主動控制接地式動力吸振器,具備簡單的結構和帶寬制振能力;主動型動力吸振器,如賈富淳和孟憲皆研究的基于功率流理論的主動式動力吸振器,具備帶寬制振能力但要加裝控制回路,所以結構比較復雜。而工業環境中大多要求動力吸振器兼備帶寬制振能力和簡單的結構,故提出一種半主動型動力吸振器。
有學者提出了可變剛度機構,如NEUBAUER和WALLASCHEK研究的分流壓電陶瓷機構;LIU等研究的電磁剛度機構;靳曉雄等研究的空氣彈簧機構等。這些為半主動型動力吸振器的剛度裝置提供了參考。
現代誕生了許多可變阻尼機構,如賈永樞等研究的基于流動模式的汽車雙筒式磁流變減振器和彭志召等研究的具有并聯常通孔的磁流變阻尼器。這些為半主動型動力吸振器的阻尼裝置提供了參考。
此外,趙凱華和陳熙謀研究了磁導材料的磁化曲線和電磁鐵內的磁場強度。李忠獻和徐龍河研究了磁流變液阻尼器的性質。史鐵鈞和吳德峰研究了賓漢流體的性質。背戶一登研究了動力吸振器參數的優化方法。
基于上述研究,為實現寬頻制振,提出空氣-磁流變液半主動型動力吸振器的結構并分析其剛度和阻尼。由于此動力吸振器可以實現剛度和阻尼的雙重調節,對主質量振幅的削減程度較大。
1 結構及原理
空氣-磁流變液半主動型動力吸振器的結構如圖1所示。平衡狀態下,氣室1對質量塊的壓力、氣室2對質量塊的壓力和質量塊受到的重力平衡,當質量塊產生向下的位移時,氣室1體積增大壓力減小,氣室2體積減小壓力增大,質量塊受到向上的合力。這樣,在質量塊和外殼之間就產生了一個剛度,且可以通過調節兩氣室的初始高度和初始氣壓調節剛度的大小。質量塊的下端和外殼通過磁流變液阻尼器連接,阻尼器內的磁流變液在常態下是牛頓流體。但是,磁流變液在流動狀態下,若接觸到垂直其流動方向的磁場,它與磁場接觸的部分就會變為賓漢流體,且其屈服剪應力隨外加磁場磁感應強度增大而增大。阻尼器內含電磁機構,可以通過控制電流大小來控制磁場的磁感應強度,進而控制阻尼力。這樣,在質量塊和外殼之間就實現了一個可調阻尼。
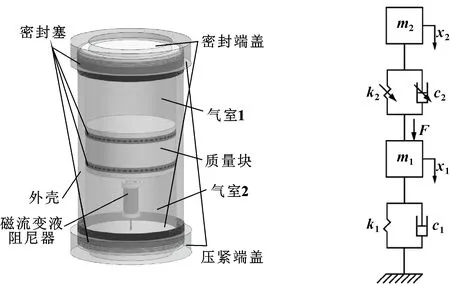
圖1 空氣-磁流變液半主動型動力吸振器 圖2 系統的結構簡圖
動力吸振器與主質量連接后系統的結構簡圖如圖2所示。其中:、、、分別是主質量的質量、剛度、阻尼、位移;、、、分別是動力吸振器質量塊的質量、剛度、阻尼、位移;是外界激勵。、的單位為kg,、的單位為N/m,、的單位為N·s/m,、的單位為m。
2 空氣彈簧的可變剛度
空氣彈簧的簡圖如圖3所示。圖中、分別是氣室1的初始高度和初始壓力;、分別是氣室2的初始高度和初始壓力;是質量塊的端面面積;取向下為正方向。、的單位為m,、的單位為Pa,的單位為m。
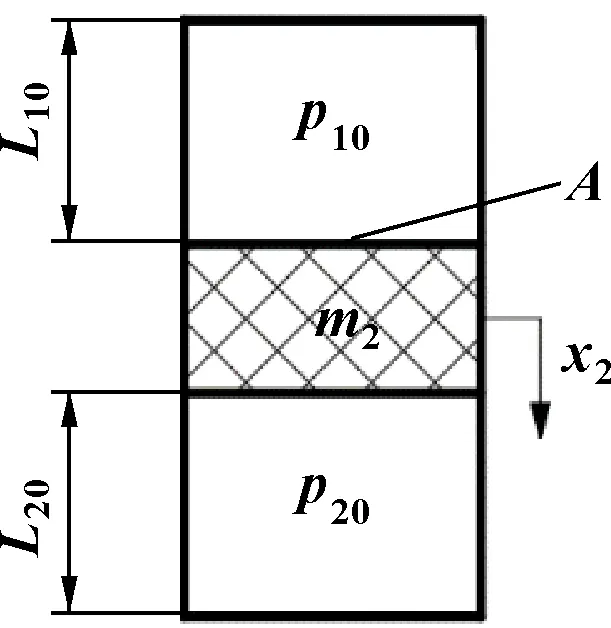
圖3 空氣彈簧簡圖
氣室1和氣室2內的氣體狀態方程分別為
()133=(+)133
(1)
()133=(-)133
(2)
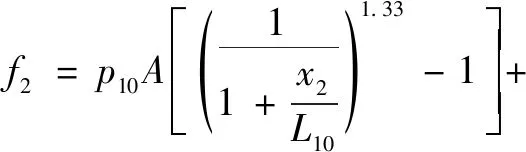
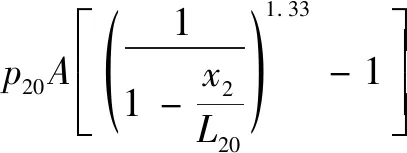
設兩氣室對質量塊的壓力和質量塊受到的重力的合力為(單位:N),向下為正方向,則:
=+-
(3)
對于初始狀態下的質量塊,有:
+-=0
(4)
聯立式(1)—式(4),可得:
(5)
通常情況下,遠小于和,將式(5)在=0處按泰勒公式展開并忽略二階及以上小量,有:
(6)
則:
(7)
由式(7)知:可以通過調節、、、調節。
3 磁流變液阻尼器的可變阻尼力
磁流變液阻尼器的結構如圖4所示。、和分別為兩磁導盤的厚度、間距和外徑,為兩磁導盤之間的伸縮桿軸段半徑,和分別為磁導外殼的內徑和外徑。磁導盤1、磁導外殼、磁導盤2、伸縮桿由磁導材料DR530制成。密封端蓋1、隔液盤、密封端蓋2、壓緊端蓋、壓緊環、導向環由絕磁材料奧氏體不銹鋼304制成。磁流變液選用MRF-J。、、、、、的單位為m。
圖4 磁流變液阻尼器的結構
這樣,通電線圈、兩磁導盤之間的伸縮桿軸段、磁導盤1、磁導盤1和磁導外殼之間的氣隙、磁導外殼、磁導盤2和磁導外殼之間的氣隙、磁導盤2就形成了一個圓柱形閉合磁路。由于磁路整體圍繞圓柱的軸旋轉對稱,所以只需取任一過軸的面進行磁路分析。磁路簡圖如圖5所示,~分別為磁路中各段的磁場強度。此外,磁路中各段的路徑為~,對應的磁感應強度為~,對應的橫截面積為~,對應的磁通量為~。~的單位為A/m,~的單位為m,~的單位為T,~的單位為Wb。
圖5 磁路簡圖
由于磁路為柱形,所以與有關(=2,3,4,6,7,8)。此外,根據圖4,有:
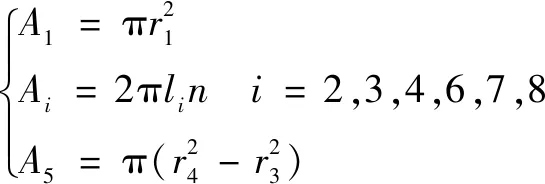
(8)
根據文獻[12],磁導材料DR530的磁化曲線如圖6所示,為DR530的磁感應強度。為其磁場強度。根據圖6進行函數表達式的擬合,有:
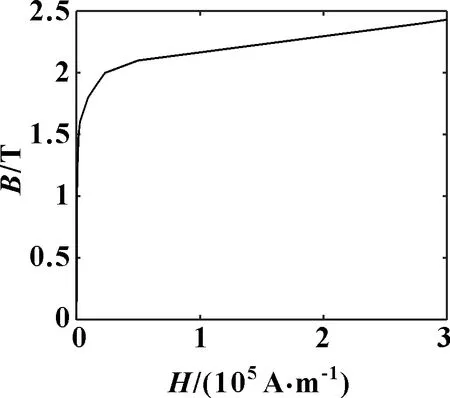
圖6 DR530的磁化曲線
=045lg(+1)
(9)
則對于磁路中的磁導體,有:
=045lg(+1)=1,2,4,5,6,8
(10)
空氣的磁導率為(單位:H),氣隙的磁感應強度為
==3,7
(11)
根據磁通量定理,有:
==1,2,…,8
(12)
由磁通量互等定理,有:
=======
(13)
聯立式(8)、(10)—(13),可得:

(14)

(15)

(16)
通電線圈的匝數為,電流為(單位:A),則由安培環路定理,有:


(17)
將式(14)—式(16)代入式(17),得:



(18)
令:
=+1
(19)
將式(19)代入式(18)并化簡,得:


(20)
將式(20)的積分寫作面積和的形式,之后可以求得,再聯立式(11)(15)可求得氣隙中徑處的磁場強度:

(21)
磁流變液的剪切屈服強度為(單位:Pa),根據文獻[14],氣隙中的磁流變液MRF-J屈服剪應力和氣隙中徑處磁場強度的關系為

10-5708 3×10+0154 2-7
(22)
磁導盤1上下兩側磁流變液的壓降Δ由四部分組成:通道面積變小造成的壓降Δ、磁流變液屈服極限造成的壓降Δ、磁流變液在氣隙內流動的沿程壓降Δ、通道面積變大造成的壓降Δ,壓降的單位為Pa。磁流變液MRF-J的動力黏度和密度分別為(單位:Pa·s)和(單位:kg/m)。此外,設:

(23)
根據賓漢流體力學模型,有:

(24)
(25)
(26)

(27)
Δ=Δ+Δ+Δ+Δ
(28)
磁流變液阻尼器的阻尼力為(單位:N),則:
=Δ
(29)
4 數值仿真
為探究空氣-磁流變液半主動型動力吸振器的制振效果,對動力吸振器對主系統的制振效果進行了數值仿真,參數如表1所示。
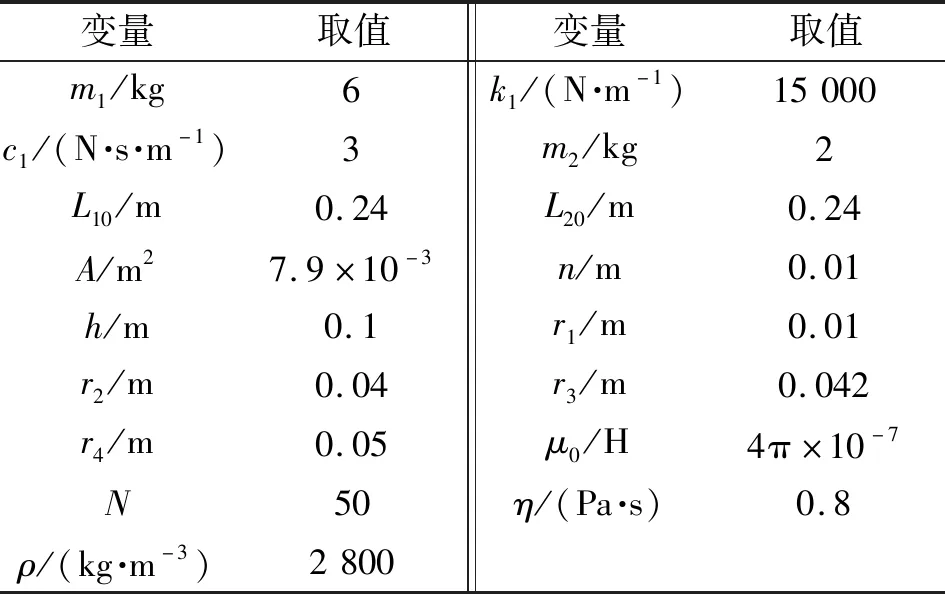
表1 仿真參數
空氣-磁流變液半主動型動力吸振器的制振效果如圖7所示。可知:當不加裝動力吸振器時,系統在外力的作用下,當角頻率為276、352 rad/s時,發生共振且主質量的振幅達到最大,分別為0.009、0.009 2 m;當加裝動力吸振器時,系統在外力的作用下,當角頻率為276、352 rad/s時,同樣發生共振且主質量的振幅達到最大,最大幅值分別為0.005、0.005 1 m。這表明,動力吸振器對主質量振幅削減的百分比在不同角頻率的激勵下是不同的,當系統共振時,其削減的比例最大,達到45%。
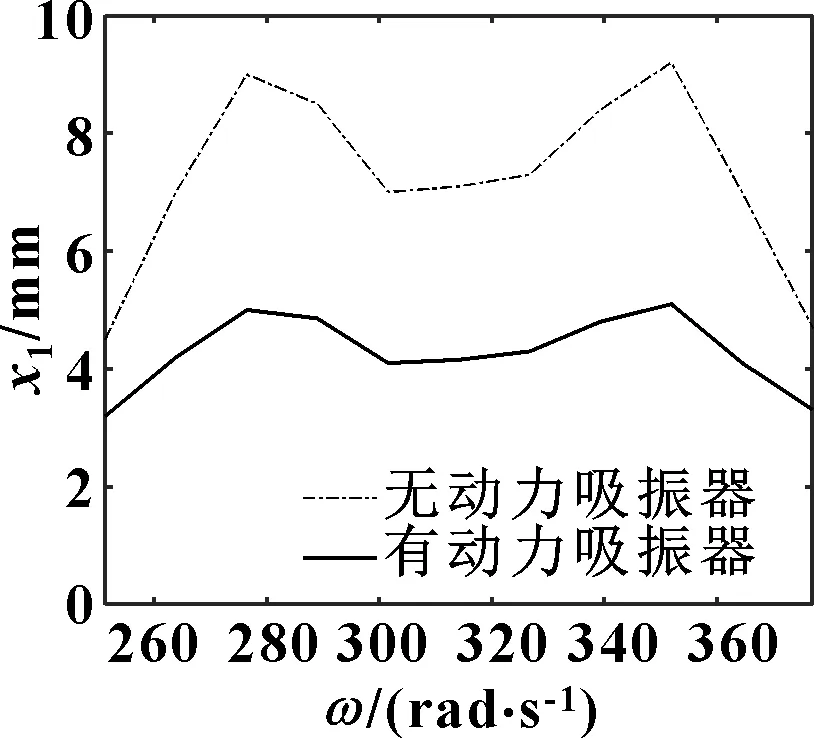
圖7 空氣-磁流變液半主動型動力吸振器的制振效果
5 結論
針對較大振幅削減的帶寬制振需求提出了一種具有可變剛度和可變阻尼的空氣-磁流變液半主動型動力吸振器。它通過空氣彈簧實現可變剛度,通過磁流變液阻尼器實現可變阻尼力。通過氣體狀態方程求出了剛度、氣室初始高度、氣室初始氣壓的函數關系。通過DR530的磁化曲線、安培環路定理、磁通量互等定理、賓漢流體在平板間隙中流動時的壓降求得阻尼力和線圈電流的關系。所設計的空氣-磁流變液半主動型動力吸振器至多可以削減主質量振幅的45%,可以有效抑制主系統的共振。
猜你喜歡
中學生數理化·中考版(2022年10期)2022-11-10 09:37:42
中學生數理化·八年級物理人教版(2022年12期)2022-02-14 07:08:42
中學生數理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學生數理化·中考版(2020年10期)2020-11-27 01:59:48
中國生殖健康(2019年2期)2019-08-23 08:12:08
石油化工建設(2018年6期)2018-04-22 03:16:54
產品可靠性報告(2017年7期)2017-09-05 09:49:12
中學生數理化·八年級物理人教版(2017年12期)2017-04-18 12:59:38
汽車觀察(2016年3期)2016-02-28 13:16:26
民生周刊(2014年7期)2014-03-28 01:30:54
