承壓設備水壓試驗自動控制裝置設計與實現
2022-10-13 09:27:40章鎮宇王宏馮佳俊王開楝陳家焱
機床與液壓 2022年18期
章鎮宇,王宏,馮佳俊,王開楝,陳家焱
(1.中國計量大學質量與安全工程學院,浙江杭州 310018;2.湖州市特種設備檢測研究院,浙江湖州 313000)
0 前言
承壓特種設備因其應用的特殊性,若發生事故會產生極大的危害,所以工廠對出廠的承壓設備除要進行常規的檢查外,還需要通過水壓試驗考核其強度,將危險因素充分暴露出來。目前企業中廣泛使用的水壓試驗方法為直接將泵與承壓設備連接,由試驗人員手動控制泵加壓或泄壓完成水壓試驗。這種方法無法準確地加壓或泄壓至設定壓力,且由于工人疏忽過度加壓導致承壓設備損壞的現象時有發生,難以實現對壓力試驗過程的精確控制。水壓試驗合格性評價結論是通過肉眼觀察壓力表壓降的方法完成的,具有很強的主觀性,容易出現錯判以及誤判的情況。
因此研發一套承壓設備水壓試驗自動控制裝置,使它能夠嚴格按照承壓設備水壓試驗相關標準自動完成試驗,排除人為因素對水壓試驗的干擾和判斷,根據相關標準自動判斷水壓試驗合格性,有助于提高水壓試驗控制自動化程度和水壓試驗合格性判斷準確性。
1 裝置總體方案設計
1.1 裝置需求分析
圖1所示為承壓設備壓力試驗標準曲線。相關標準對不同承壓設備的壓力試驗過程作了明確規定,但在實際水壓試驗中,一般都是采用加壓泵直接進行加壓,存在加壓穩定性差、加壓曲線線性化差的問題,無法實現按試驗標準曲線加壓。以往的加壓泵加壓過程是人工操作的,當壓力增大到試驗壓力時,人工操作使加壓泵停止,這樣的加壓方式可能導致加壓泵啟動過于頻繁且加壓過程中不能精確控制水壓,進而影響水壓試驗合格性判定。同時,泄壓過程采用手動泄壓的方式,會導致泄壓過快,容易導致承壓設備變形或損壞。因此,設計的壓力試驗自動控制裝置應具有升壓穩定可靠、保壓合格判定準確、泄壓緩慢精確的特點。通過與特檢部門溝通交流,裝置加壓或泄壓完成后保壓狀態的真實值與設定值的誤差在5%以內滿足實際使用需求。
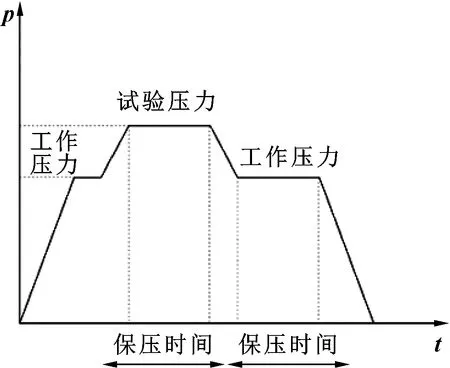
圖1 水壓試驗標準曲線
1.2 總體方案設計
根據上述需求設計水壓試驗自動控制裝置總體方案,如圖2所示。自動控制裝置設計主要包括控制方案設計、裝置結構設計、裝置控制系統設計和性能測試四部分。
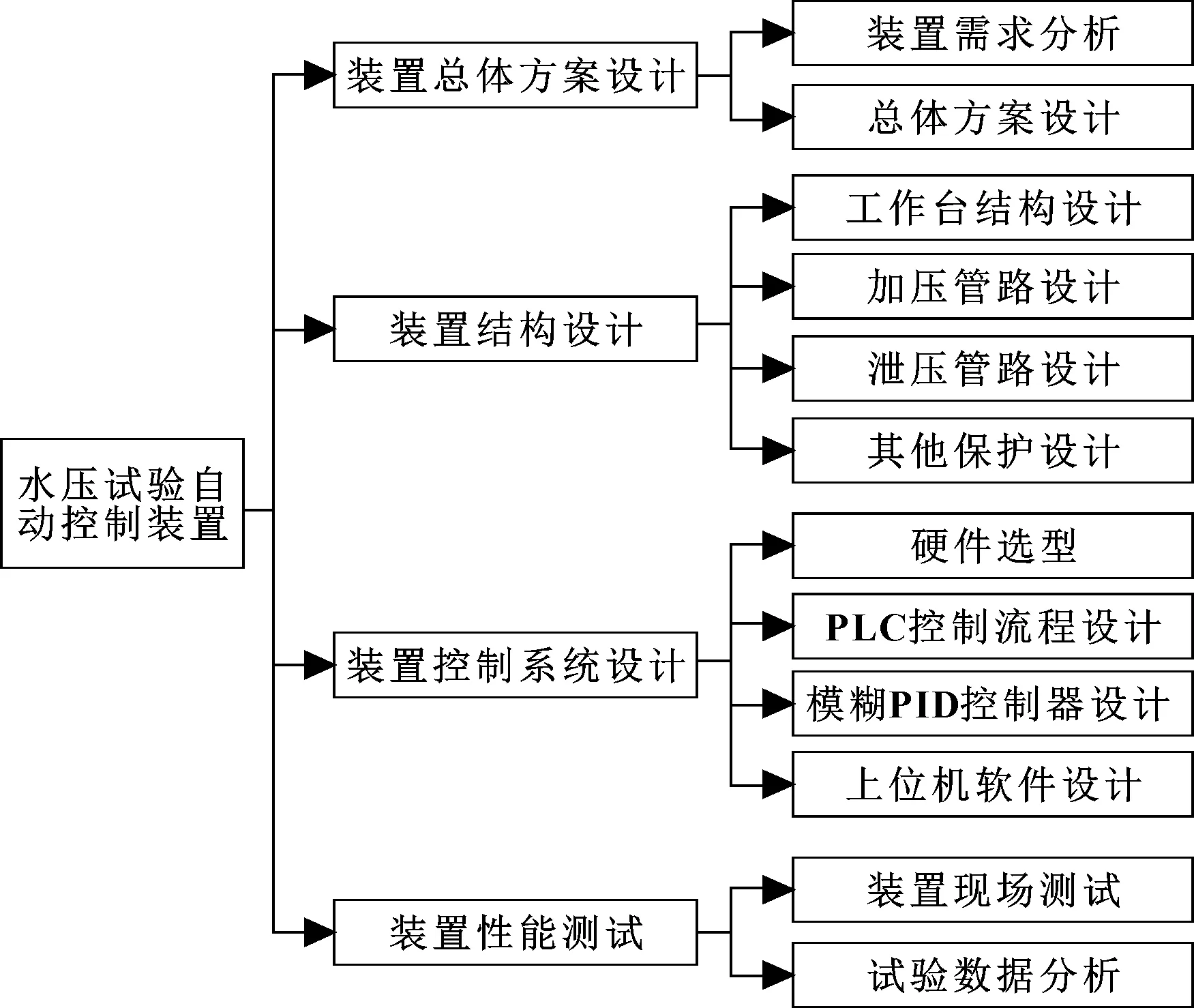
圖2 自動控制裝置方案
裝置控制方案設計擬采用變頻控制增加泵增壓和比例閥控制降壓的方式實現水壓試驗標準曲線,控制方案如圖3所示。試驗加壓過程是通過壓力變送器采集水壓試驗實時壓力,發送至PLC,與水壓試驗曲線進行對比,由模糊PID控制器計算出輸出量給變頻器,變頻器根據輸出量控制加壓泵調節轉速,從而調整加壓泵輸出壓力,改變加壓速度,以達到穩定控制加壓泵的目的。試驗保壓期間工控上位機實時采集壓力數據與保壓期間設定壓力進行對比計算,保壓期間未出現壓降超過標準規定值的情況時,判定試驗合格,否則判定試驗失敗,試驗失敗系統自動終止水壓試驗。試驗降壓是通過控制比例閥的閥門開度實現的,比例閥閥門開度與承壓設備容積有關。
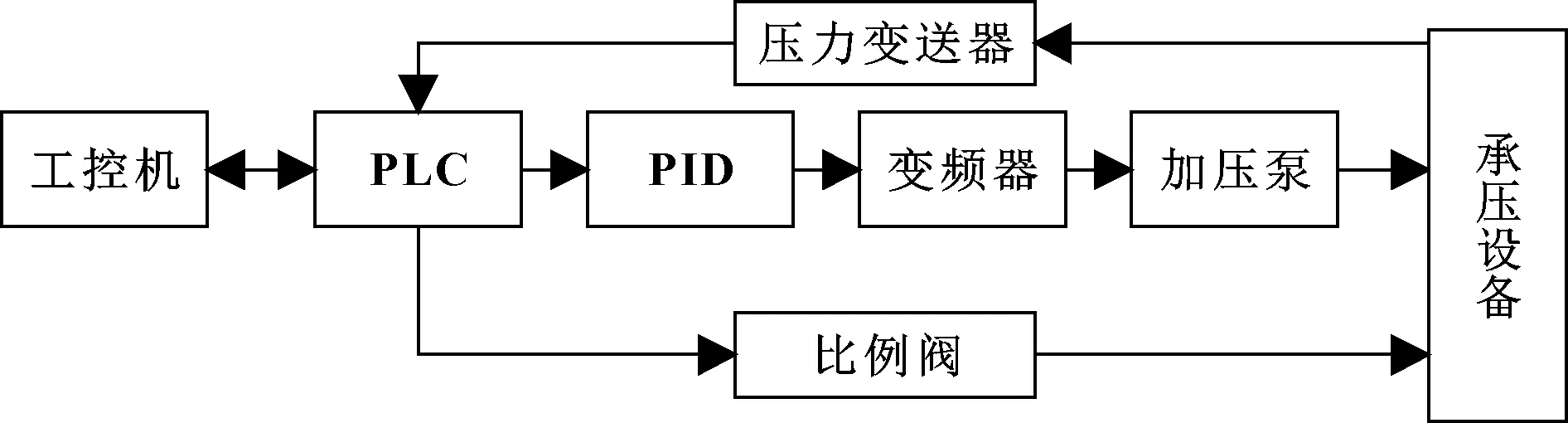
圖3 控制方案
裝置結構設計包括工作臺結構設計、加壓管路設計、泄壓管路設計和其他保護設計。根據水壓試驗操作情況和實際需求進行裝置結構設計,使它能夠滿足真實水壓試驗現場要求。
控制系統設計包括控制系統硬件選型與設計、PLC控制系統設計、模糊PID控制器設計和上位機軟件設計四部分。結合PLC和模糊PID控制器實現對水壓試驗全過程的精確控制,通過上位機軟件實現對水壓試驗合格性判定和人機交互操作。
性能測試主要對所設計的承壓設備水壓試驗自動控制裝置進行實際的現場測試,發現設計上存在的問題,進一步完善系統功能。
2 裝置結構設計
2.1 工作臺結構設計
為方便進行設備水壓試驗,裝置整體結構采用可移動工作臺形式,如圖4所示。工作臺采用控制裝置中普遍采用的直柜式結構,根據人機工程原理,工作臺高度900 mm的點位人體能量消耗最少,越遠離這一點,體能消耗越增大。因此,設計總體高度為1 600 mm,工作臺高度為900 mm,工作臺工控機觸摸屏傾斜角度為30°,裝置下方安裝滾輪方便移動。工作臺分上下兩層,上下層用隔板隔開,PLC模塊置于工作臺上層,其余硬件置于下層,起到防止工控機和PLC模塊進水產生危險的目的。
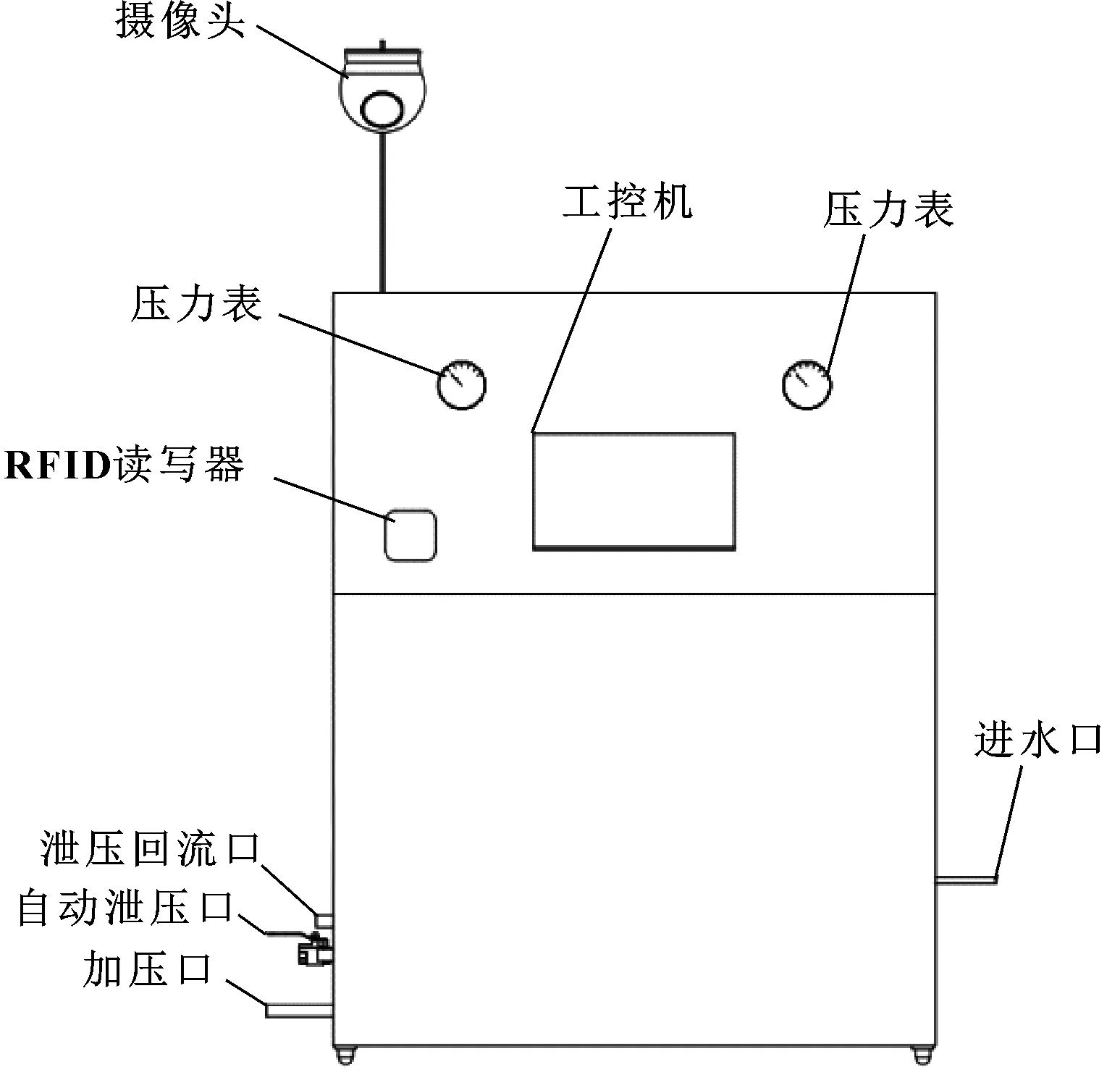
圖4 工作臺整體結構
2.2 加壓管路設計
為實現加壓過程平穩,采用變頻控制加壓泵的方法實現水壓試驗增壓操作,加壓時使用變頻器控制加壓泵,將壓力變送器采集的實時壓力反饋給PLC,PLC根據試驗參數設置,計算出輸出參數發給變頻器,控制變頻器的輸出頻率,從而達到控制加壓泵、控制加壓過程的目的。為此,在加壓管路設計時,采用變頻器控制加壓泵轉速進行加壓。加壓泵從儲水箱中取水,水流經過加壓泵、單向閥、壓力變送器、加壓口后進入承壓設備。同時,加壓泵出口安裝有蓄能器,用于吸收壓力沖擊起到壓力緩沖的作用。為防止儲水箱中的水溢出進水口,儲水箱安裝有浮球閥,圖5所示為加壓管路結構。
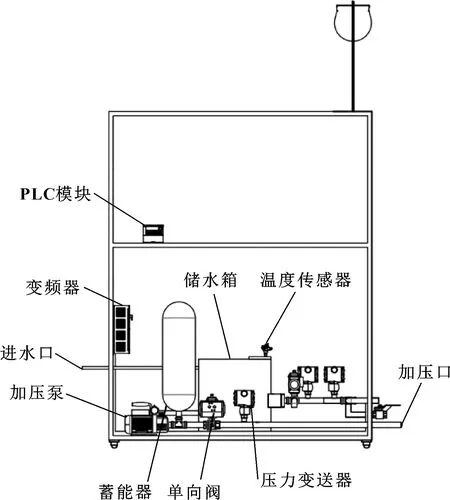
圖5 加壓管路結構
2.3 泄壓管路設計
為實現精準泄壓,采用比例閥控制出口流量進行緩慢泄壓。泄壓時PLC根據容器體積確定比例閥閥門開度并打開比例閥,水從承壓設備流至泄壓回流口、單向閥、比例閥和自動泄壓口,實現泄壓。壓力變送器采集實時壓力給PLC,PLC根據實時壓力控制比例閥的開度并判斷泄壓是否完成。圖6所示為泄壓管路結構。
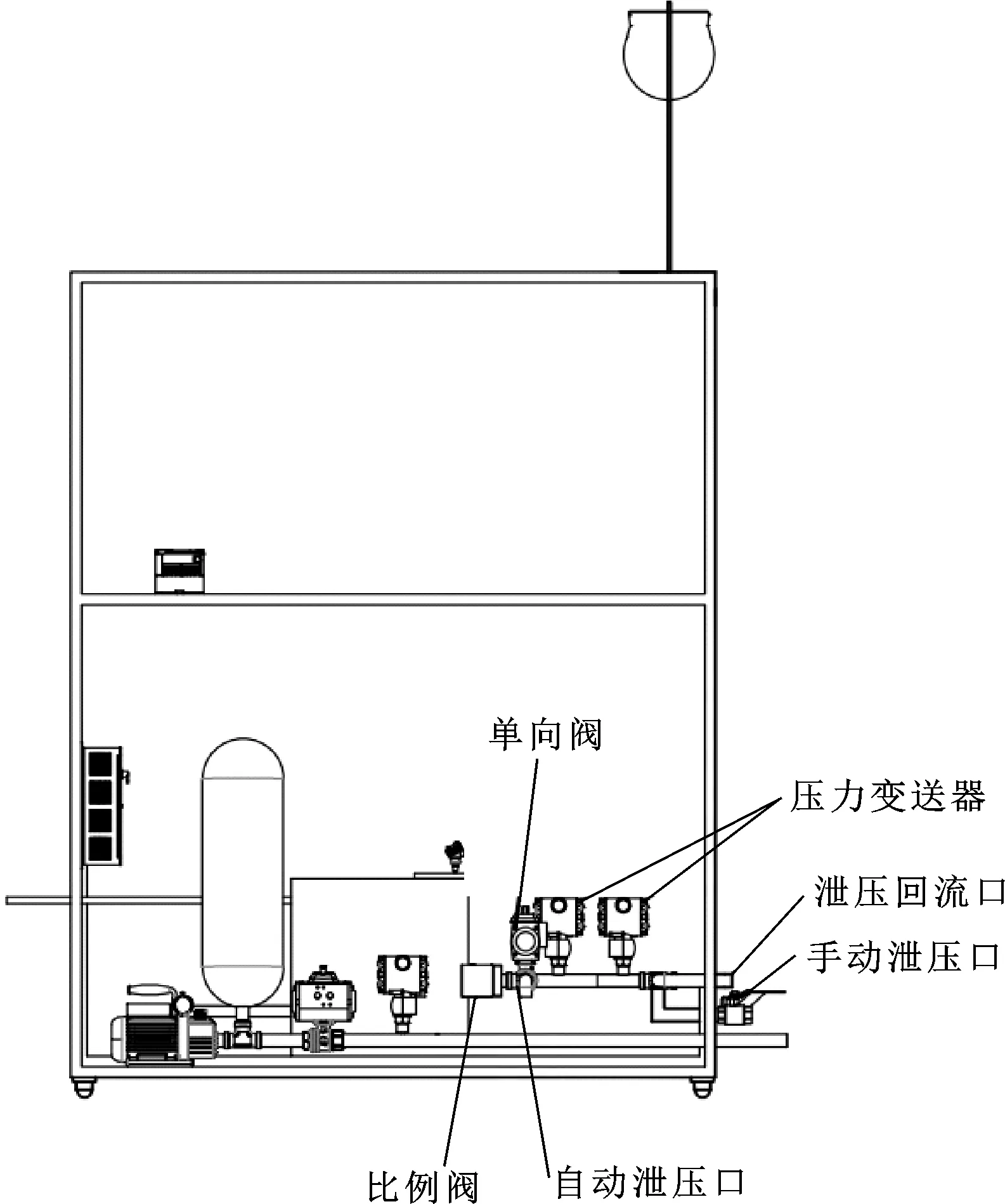
圖6 泄壓管路結構
2.4 其他保護設計
由于該裝置采用PLC控制比例閥閥門開度進行泄壓,當出現停電等意外事故時容器內壓力無法正常排除,所以在泄壓管路上添加手動泄壓口,用于特殊情況下緊急排壓。
3 裝置控制系統設計
裝置控制系統是實現水壓試驗控制的關鍵,該部分主要由控制硬件選型、PLC控制流程設計、模糊PID控制器設計和上位機人機交互設計等部分組成。
3.1 硬件選型
水壓試驗自動控制裝置硬件主要由電源、工控機、PLC、壓力變送器、溫度傳感器、變頻器、加壓泵、比例閥、A/D及D/A轉換模塊等構成,控制系統硬件結構如圖7所示。
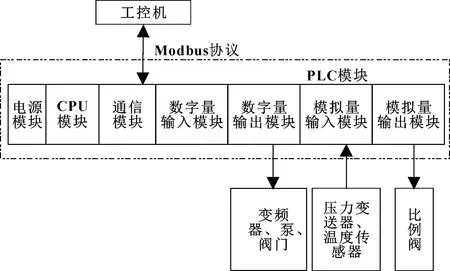
圖7 控制硬件結構
PLC作為控制系統的核心,需要對所采集的數據進行收集、分析、計算,然后根據不同的信號或接收到的指令指揮系統完成特定的工作,包括壓力的采集與控制、各種閥的開關、泵的啟停和設備運行狀況的監視等。選擇西門子S7-300系列PLC作為承壓試驗裝置的主控制器。工控機與PLC之間通過Modbus協議建立通信實現數據交換,操作人員可以通過工控機上的上位機軟件對裝置進行控制。
在裝置處于工作狀態時,加壓泵需不斷改變轉速實現水壓控制。在使用變頻器對泵進行控制時,變頻器中可能產生過載電流,所以在選擇變頻器時需考慮變頻器的過載能力。該裝置采用西門子MM440系列變頻器,它有較強的過載能力,同時具有短路、過載、過壓、缺相、失速等多種保護和故障輸出功能,能有效保證系統安全高效的運行。
3.2 PLC控制流程設計
PLC主要用于控制水壓試驗全過程,其工作流程如圖8所示。
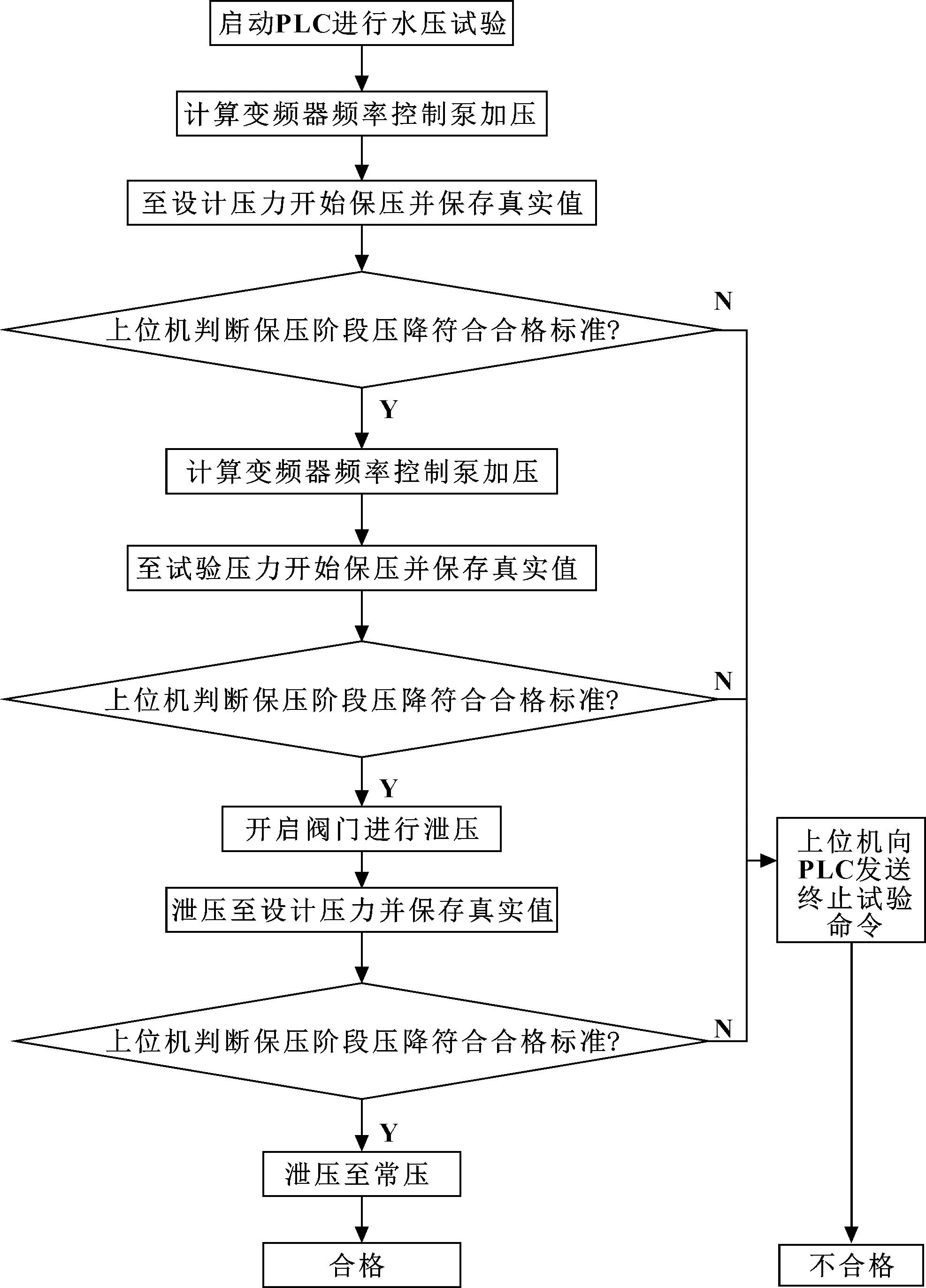
圖8 PLC工作流程
點擊工控機交互頁面的啟動按鈕向PLC發送開始指令開啟水壓試驗,PLC對比壓力變送器上傳的壓力數據與設定的試驗壓力,進行模糊控制計算,得到輸出量來調節變頻器頻率進而控制泵的轉速實現加壓。當壓力上升至大于或等于設計工作壓力時暫停加壓,進入設計工作壓力第一次保壓階段,保存此刻實際壓力值作為保壓階段壓力真實值,工控上位機根據實時壓力計算得到保壓期間壓力真實值與實時壓力值之間的壓降值,根據相關標準判斷壓降是否在允許范圍內,若不在允許范圍內立即向PLC發送中斷試驗指令,判定此次水壓試驗不合格,若在允許范圍內即可判定為合格。判定合格后繼續升壓至試驗壓力時停止加壓,進入試驗壓力保壓階段,保存此刻實際壓力值作為保壓階段壓力真實值,判定合格后進入第一次降壓階段,開啟泄壓回流管路上的單向閥和比例閥進行泄壓,降壓至大于或等于設計工作壓力,進入設計工作壓力第二次保壓階段,保存此刻實際壓力值作為保壓階段壓力真實值;判定合格后進入第二次泄壓階段,將承壓設備內壓力泄至常壓后試驗結束。若3次保壓期間均判定為合格,則此次水壓試驗判定為合格,有一次不合格則判定水壓試驗為不合格。
3.3 模糊PID控制器設計
試驗加壓期間通過壓力變送器采集水壓試驗實時水壓值,發送至PLC計算輸出量控制變頻器的頻率,從而控制加壓泵調節轉速,實現穩定控制加壓的目的。本文作者擬采用模糊PID控制,將傳統PID控制與模糊控制相結合,通過模糊控制選擇最佳的PID參數用于水壓試驗。圖9所示為模糊PID控制器結構。首先,對壓力試驗數據進行模糊化;然后,選擇模糊控制規則;再進行模糊推理;最后,通過最大隸屬度法得到PID控制參數。
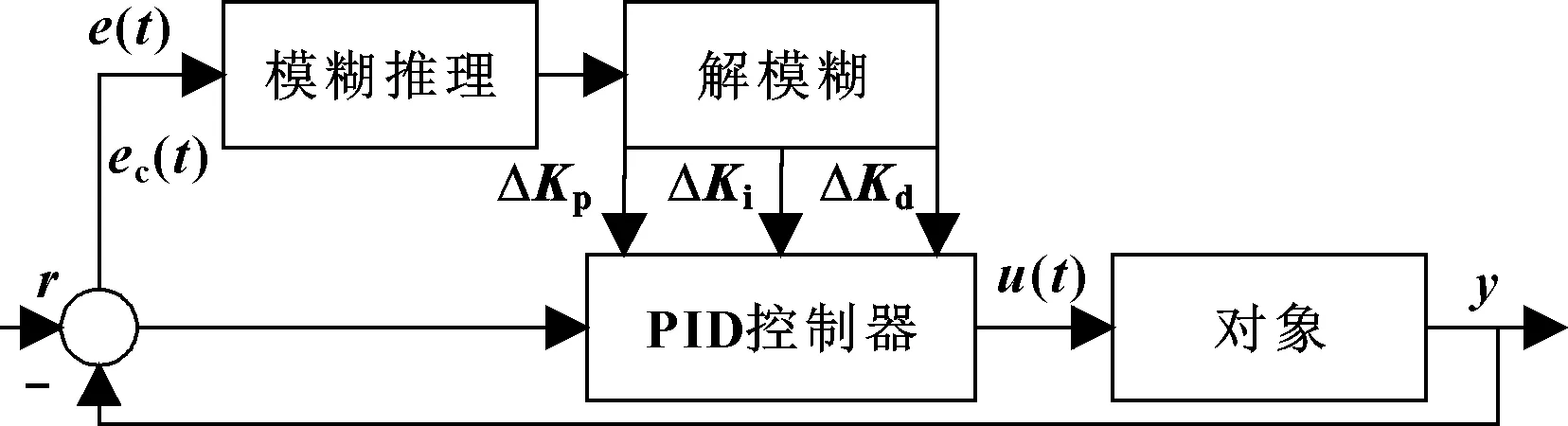
圖9 模糊PID控制結構
在控制器中,壓力偏差()由時刻的壓力設定值即試驗壓力值()與承壓設備內實際壓力值()構成:
()=()-()
(1)
偏差變化率()由當前時刻的壓力偏差()與上一時刻的壓力偏差(-1)構成:
()=()-(-1)
(2)
輸出變量()由()、()以及相關變量、、構成。表示PID控制器的比例系數,表示PID控制器的積分系數,表示PID控制器的微分系數。

(3)
3.3.1 模糊化
通過壓力變送器采集的實時壓力數據計算得到壓力偏差和偏差變化率的論域語言變量取7個語言變量{負大,負中,負小,零,正小,正中,正大},量化之后的論域為{-6,-4,-2,0,2,4,6}。()論域語言變量同樣取{負大,負中,負小,零,正小,正中,正大},量化后的論域值為{-6,-4,-2,0,2,4,6}。壓力偏差、偏差變化率和變量Δ、Δ及Δ均采用三角隸屬度函數。
3.3.2 模糊控制規則
根據以往的專家經驗,可以得到、()和的模糊控制表,篇幅所限文中僅在表1展示Δ的模糊控制規則。
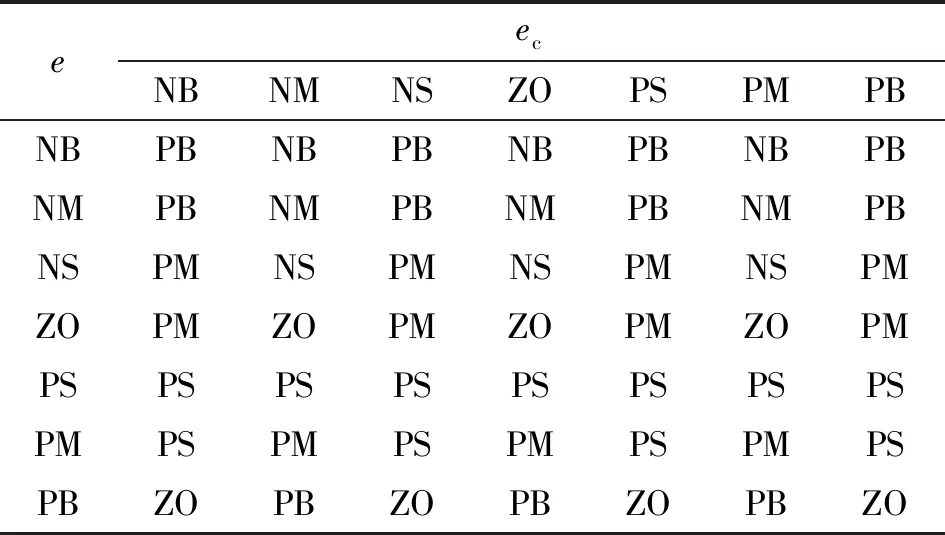
表1 ΔKp的模糊控制規則
3.3.3 模糊推理和解模糊
常見的解模糊方法為最大隸屬度法和重心法,選擇計算較為簡單的最大隸屬度得到PID控制參數Δ、Δ和Δ,根據公式(4)修正PID的控制參數。
=Δ+Δ
=Δ+Δ
=Δ+Δ
(4)
將修正后的參數代入公式(3)進行運算,得到變頻器的控制信號,進而控制泵的轉速以調節水壓。
3.3.4 Simulink仿真結果
經以上模糊控制器設計后,利用MATLAB對傳統PID控制器和模糊PID控制器進行仿真研究,對獲取的階躍信號仿真曲線進行對比,如圖10所示。可知:傳統PID控制器調整時間為24 s,超調量為17.5%;模糊PID控制器調整時間為17 s,超調量為7%。以上分析表明,相較于傳統PID控制器,模糊PID控制器在加壓時水壓上升穩定,能實現供水水壓與設定水壓實時匹配,使整個系統的水壓控制穩定,所以文中選擇模糊PID控制器應用于水壓試驗控制。
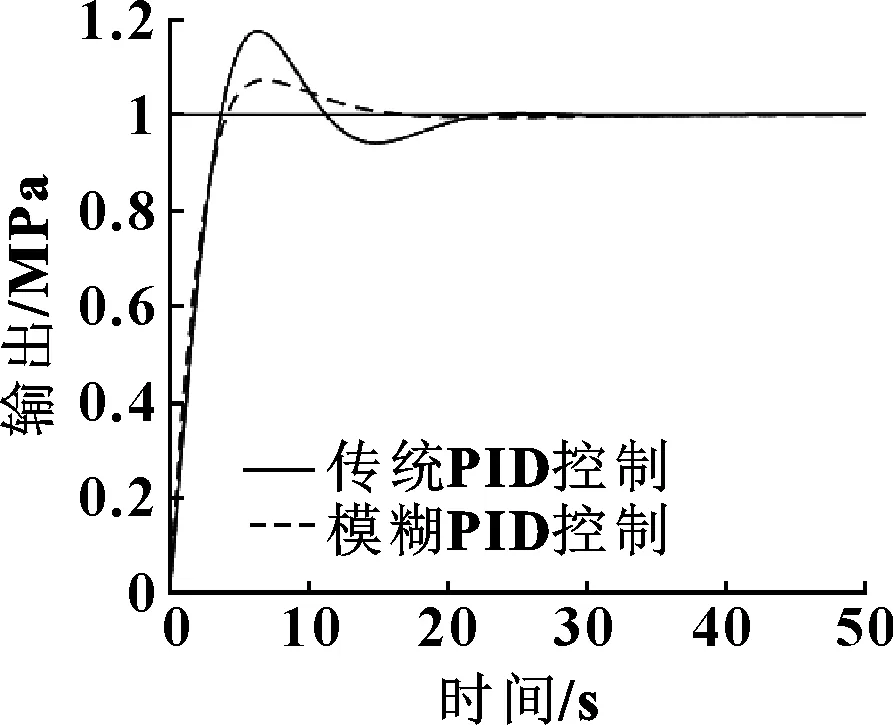
圖10 系統階躍信號響應仿真曲線對比
3.4 上位機軟件設計
上位機系統主要用于和PLC信息交互,其功能模塊如圖11所示,功能界面如圖12所示。上位機系統主要包括用戶管理模塊、水壓試驗模塊和RFID及攝像模塊三部分。
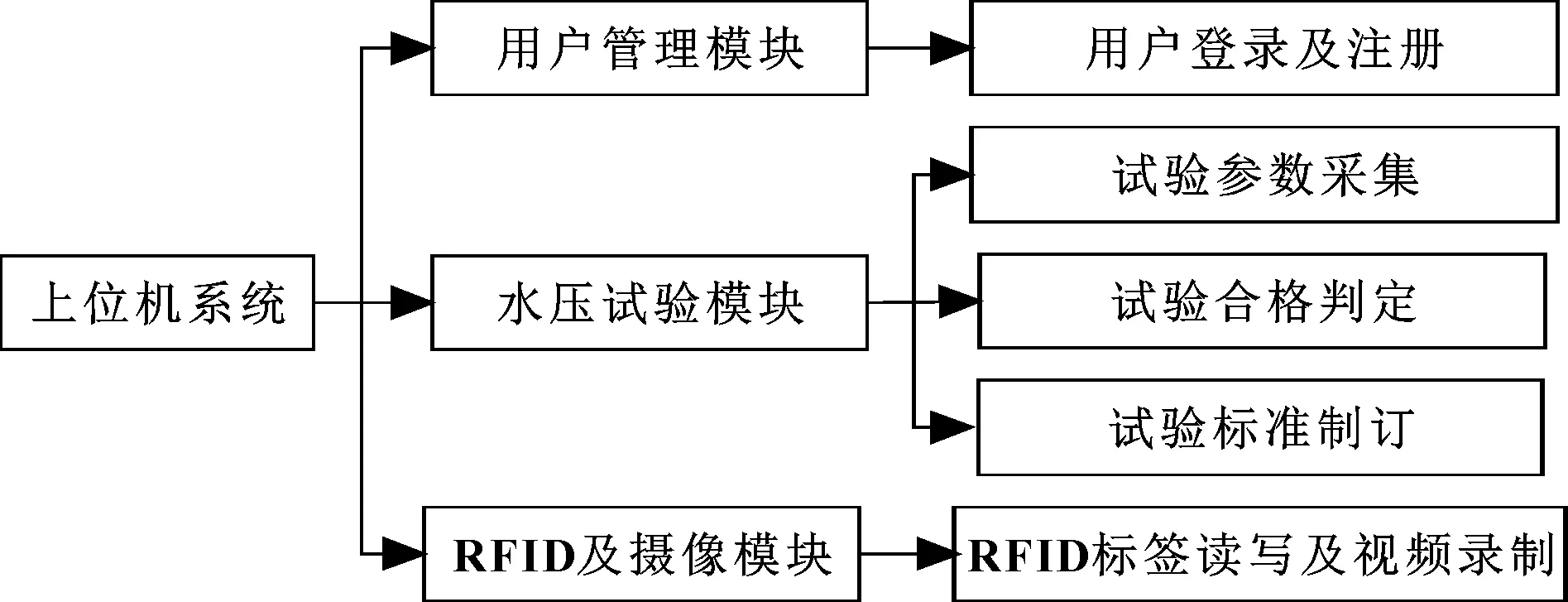
圖11 上位機系統功能模塊
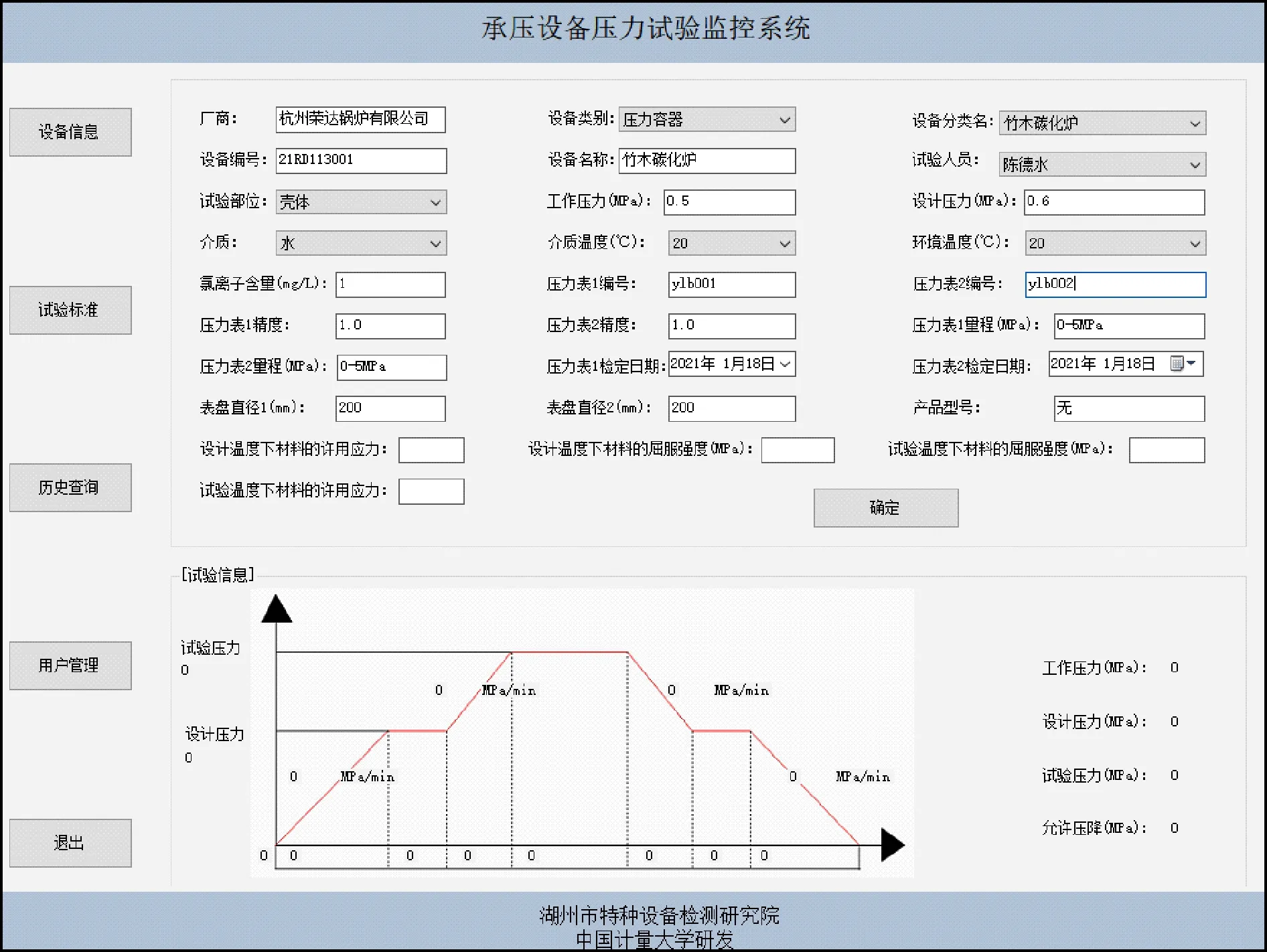
圖12 上位機系統界面
用戶管理模塊主要用于用戶登錄以及注冊,注冊用戶可設置不同權限。
水壓試驗模塊為上位機系統的核心模塊,主要包括試驗數據采集、試驗合格判定和試驗標準制訂功能。試驗數據采集功能為實時采集水壓試驗過程數據,同時實時顯示試驗過程中的壓力和溫度,并生成實時的壓力波形曲線。試驗結束后,自動保存相關試驗數據和試驗曲線。試驗合格判定功能主要用于判定水壓試驗合格與否,上位機讀取到壓力參數后經過計算與允許壓降進行比較,實時壓降未超過允許壓降時為合格,實時壓降超過允許壓降時判定承壓設備水壓試驗不合格。試驗標準制訂功能用于設置水壓試驗期間應遵循的標準參數,即保壓時間、允許壓降,水壓試驗時將嚴格按照保壓時間進行保壓,按照允許壓降判定水壓試驗合格性。
RFID及攝像模塊包括RFID標簽讀寫和視頻錄制功能。使用RFID讀寫器讀取RFID電子標簽TID與承壓設備唯一綁定,將承壓設備信息以及水壓試驗結果寫入與承壓設備唯一綁定的RFID電子標簽中,用于防偽和追溯。試驗開啟時攝像頭自動錄制水壓試驗現場情況,試驗結束后停止錄制并將錄制的視頻自動保存在工控上位機中,可用于試驗追溯。
4 裝置性能測試
4.1 裝置現場測試
2021年1月,在某壓力容器企業進行了裝置運行試驗,完整地進行了多次水壓試驗,現場如圖13所示,水壓試驗控制系統軟件界面如圖14所示。

圖13 水壓試驗現場

圖14 水壓試驗控制系統軟件界面
4.2 試驗數據分析
在試驗現場對多種不同承壓設備的水壓試驗進行測試,對水壓試驗過程關鍵參數保壓壓力進行了記錄,通過數據分析處理評價它是否滿足試驗要求。每個保壓階段的設定值與測量值如表2所示。
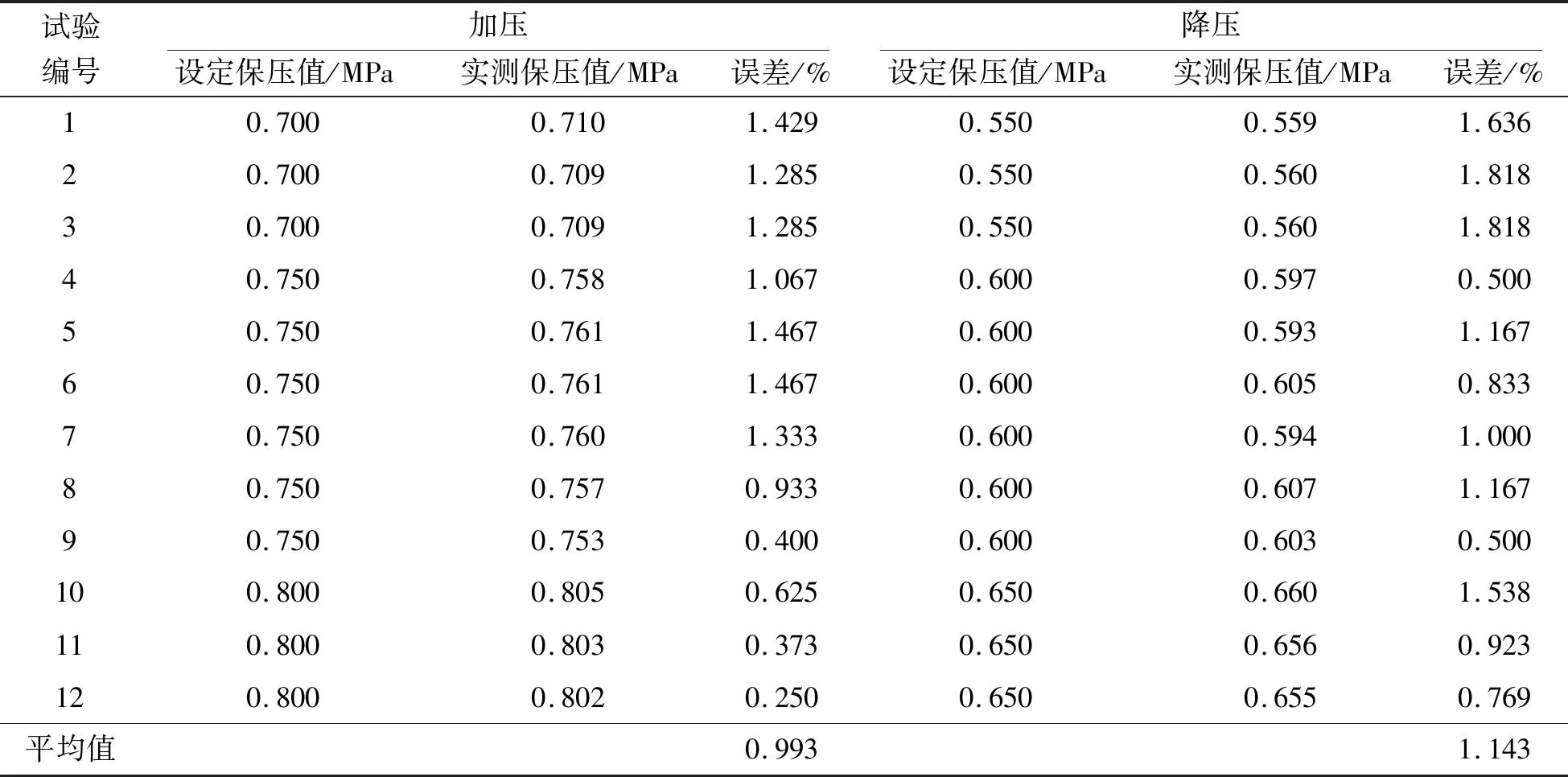
表2 控制系統試驗數據結果
由表2可知:該系統加壓至試驗壓力設定值的最大誤差為1.467%,最小誤差值0.250%,平均誤差值為0.993%;該系統降壓至設計壓力設定值的最大誤差為1.818%,最小誤差0.500%,平均誤差為1.143%,均滿足誤差小于5%的設計要求。
5 結論
本文作者設計一種承壓設備水壓試驗自動控制裝置。利用PLC、變頻器和比例閥實現了水壓試驗全過程控制,能夠實現水壓試驗按標準曲線進行,不受人為因素影響,同時能夠依據保壓期間實時壓力數據判定壓力試驗合格性,水壓試驗效果較好,減輕了承壓類生產企業進行水壓試驗的繁瑣工作,降低勞動強度,節約試驗成本。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:26:08
海峽姐妹(2017年7期)2017-07-31 19:08:17
電子制作(2017年7期)2017-06-05 09:36:13
Coco薇(2017年5期)2017-06-05 08:53:16
工業設計(2016年12期)2016-04-16 02:52:00
消費者報道(2014年7期)2014-07-31 11:23:57
