一種高精度航空磁法測量系統
2022-10-13 06:15:04王濤牛云飛高定州
科技資訊 2022年20期
王濤 牛云飛 高定州
(北京探創資源科技有限公司 北京 100071)
世界上礦產資源種類萬千,總體而言可劃分為金屬礦物和非金屬礦物兩大類;能源礦物和非能源礦物。而磁法勘探通過研究巖礦石磁性差異來查明地質構造和礦產資源分布規律,在富含磁性礦物的金屬礦床中效果尤為顯著。而通過低空航空磁法勘探可以快速在地形復雜地區進行測量,保障人員安全,快速圈定找礦靶區,指導后期勘探,縮減勘探成本。目前,北京探創公司自主開發了無人機磁測系統,包含無人機采集硬件組合系統和配套的地面數據處理軟補償系統。
1 低空航磁測量系統
目前,低空航磁測量飛行系統主要有動力三角翼滑翔機載低空航磁系統、無人飛艇載超低空航磁測量系統、無人機超低空航磁測量系統這3 種。其中近年來無人機技術飛速發展,更安全穩定,效率高,逐漸占領更多市場份額。(1)多旋翼無人機磁測系統。該系統可隨地形飛行,飛行高度低,可方便做大比例尺磁測,但是飛行時間短,不如固定翼效率高。(2)固定翼無人機磁測系統。該系統效率高,飛行速度快,可隨地形飛行,但是對場地有要求,需起跑道,降落點不易控制。(3)近幾年興起的垂直起降固定翼無人機,同時兼容多旋翼機和固定翼機的優勢,能夠更安全有效地操作,在行業中異軍突起[1-4]。
2 無人機航磁系統組成
目前設計為HC01 飛鯊電動垂直起降固定翼無人機搭配西安華舜磁通門傳感器。無人機航磁系統的構成包括:垂直起降固定翼無人機飛行器、地面飛行控制站、導航系統、磁通門磁力儀、數據采集模塊。
該系統由無人機為旋翼和固定翼組合,旋翼定點起降,安全,對場地要求不高,航線飛行時切換為固定翼,可大幅度節省電量。翼展2.2 m,加上航磁設備機長1.45 m,但是起飛起飛重量僅10 kg,可使續航時間長達2 h。飛行海拔可達4 000 m,通信距離20 km,可在高原山區有效作業。最重要的是機身采取全復合材料,無人機與磁力儀采用碳纖維桿固定,固定螺絲采用鋁合金制,無磁性,僅無人機電機對航磁設備有干擾,但我們采取前置電池、后置碳纖維桿硬連接磁力儀方式,減少了無人機對磁力儀的干擾,同時無人機系統易配平衡,整體評價為干擾小、不受環境限制、安全系數高,結合自主研發的配套軟補償系統,可大大提高數據質量,做到有效勘探。
圖1為無人機磁測系統實物圖;圖2為地面控制站操作界面。

圖1 無人機磁測系統實物圖

圖2 地面控制站操作界面
3 磁補償
磁補償采用事后軟補償進行。
(1)以現在的工藝來說,一般磁通門傳感器三軸正交角度誤差在0.3°以內,以每個分量的磁感應強度為40 000 nT(總場69 280 nT),正交誤差為0.2°為例,使用磁通門傳感器測量計算的總場與真實值差值為243.72 nT,這個誤差對于磁法測量來說是一個很大的誤差,甚至可以說是錯誤。于是需要在測量時采取同一航向進行測量,以減少誤差。以磁傾角45°,航向正南北為例,在偏航角為5°時在同一磁感應強度下可以產生約40 nT的差值,該誤差不能滿足高精度磁測的要求,因此需要一種校正的方法來減少姿態誤差。
三軸磁通門傳感器中誤差是由于三軸非正交、數據采集卡三通道靈敏度不一致、數據采集卡零點漂移、傳感器本身剩余磁場,通過真實磁場值與實際測量磁場值得關系建立修正模型[5-6]。根據理想三軸磁通門傳感器在測量同一磁場強度時測得數值與測量姿態無關的特點,建立目標函數。最后,利用支持向量回歸機(SVR)線性算法計算出磁傳感器的各個校準參數。
假設傳感器三軸分別安裝在OX1、OY1和OZ1,而理想狀態下傳感器的三軸應為OX、OY和OZ。其中,OZ軸與OZ1軸重合,且坐標面YOZ與Y1OZ1共面,則可定義OX軸與X1OZ1面之間的夾角為α,與X1OY1面的夾角為γ,OY與OY1之間的夾角為β。實際傳感器三軸OX1、OY1和OZ1與理想正交三軸OX、OY和OZ的空間轉換關系如圖3所示。

圖3 傳感器實際三軸與理想正交三軸關系
根據上面的關系描述可以建立以下公式。

由于3 軸的靈敏度不一致,假設Z軸的靈敏度為1,設定Y軸的為KY,Z軸為KZ,有

采集卡存在零點漂移,傳感器里面也存在剩余磁場,最終三軸磁通門傳感器的實際輸出為

由于‖B‖(總場),可以利用質子磁力儀測得較為準確的數值,因此可以使用實際測得的多組B1值采用線性支持向量回歸機對式(5)進行線性回歸,計算出C-1,B0,然后對每組數據進行校正。
對該架無人機磁測系統的三軸磁通門傳感器進行誤差修正實驗,在相對穩定的地磁場環境下,任意改變磁通門傳感器的擺放姿態,分26 次對傳感器的三軸輸出B1(t)進行測試并記錄結果。
利用計算好的校正參數對不同姿態下的三軸磁通門傳感器輸出數據B1(t)進行修正,修正后所測磁場強度‖B(t)‖較修正前變化情況如圖4 所示。由圖4 可知曲線的震蕩弧度由339.54 nT,降到了29.87 nT。在姿態角度差不超過10°的情況下震蕩值小于3 nT,能滿足磁法測量要求。

圖4 姿態誤差修正前后對比圖
(2)在一地磁場較穩定的地方以質子磁力儀為日變站參考校準該測點地磁場,通過磁通門傳感器安裝在無人機航測系統上前后對比可測得飛機固定磁場的干擾參數,通過開關無人機電源前后可測得無人機磁測系統電路和電臺的磁場干擾參數,統計結果如圖5所示。由圖5 可知,無人機對磁場的影響基本為穩定值,約為4 nT,飛機在通電的情況下電路影響也基本為穩定值,可以統計出飛機加電路的影響為8.2 nT,該干擾為穩定干擾,可以簡單去除。

圖5 靜態干擾測量曲線
圖6 為舵機在1 Hz 頻率擺動情況下的干擾曲線,可以看出轉向舵位于機翼部位,離傳感器較遠,影響在0.5 nT左右,升降舵距離傳感器較近,最大干擾在3 nT左右,方向舵最大干擾在1 nT左右,由于在航線測量時飛行一般較平穩,舵機一般不參與工作,因此可以忽略舵機轉動的影響,而且舵機轉動時間短,也可以用濾波的方式去除舵機干擾。

圖6 舵機以1 Hz頻率擺動干擾測量曲線
在一地磁場較穩定的地方以質子磁力儀為日變站參考校準該測點地磁場,將無人機固定在地面,通過調整無人機飛行電流的大小可統計出飛行電流產生的干擾,統計結果如圖7 所示。由圖可以看出飛行電流的影響在6~8 nT,因此可以通過線性回歸的方式計算電流和干擾的關系公式,飛機飛行的電流一般在16 A左右,并且飛行記錄里面有每秒的電流數據。

圖7 飛機飛行電流干擾測量曲線
根據電磁感應定律,長度為l的導體,以速度v在磁感應強度為B的勻強磁場中做切割磁感應線運動時,在B、l、v互相垂直的情況下,導體中產生的感應電動勢的大小為

圖8 航空磁法△T上延180 m平面等值線異常圖

式(6)中的單位均應采用國際單位制,即V、T、m/s。
磁測系統中磁傳感器到采集設備之間導線的垂直分量為0.05 m,飛機每一秒的速度飛行速度可以通過GPS 數據計算,與飛行方向垂直的磁感應強度可以通過傳感器的By、Bz分量計算,采集卡的靈敏度約為:41.666 7 μT/V,因此磁感應強度誤差約為Bg=×0.08×v×41.6667×10-6,Bg、By、Bz單位為T。
4 無人機航磁系統處理軟件編制
(1)將存儲卡保存的二進制文件解碼,讀出每個數據包里面的時間、姿態、位置、電流、磁通門傳感器三軸的電壓文件;(2)通過算法將位置文件的經緯度按照選擇的坐標系投影為直角坐標;(3)讀取測區邊界文件刪除測區外的數據點和非航線的數據點;(4)將采集到的磁通門傳感器的3 個電壓數據轉換為磁感應強度數據;(5)讀取磁通門傳感器姿態校準參數,對3 個磁感應強度數據進行校準,并計算總場;(6)解析姿態文件、坐標文件,計算飛行的真實航向,計算出磁場在真實X、Y、Z軸的值,并計算出每個測點的磁傾角、磁偏角,以便后續采用變傾角化極處理;(7)讀取飛機磁場干擾文件,對采集的磁感應強度數據進行各項補償;(8)讀取質子磁力儀采集的日邊數據,對無人機磁測系統采集的數據進行日變校正;(9)將處理后的有效數據存盤。
5 系統使用性驗證
為了驗證該航測系統的實用性,在山東某金礦區域進行了地磁與航磁測量對比試驗,其中地磁采用100 m×20 m 測網,航磁采用測網為100 m 間距,航速為23 m/s,隨地形飛行,對地高度為180 m。
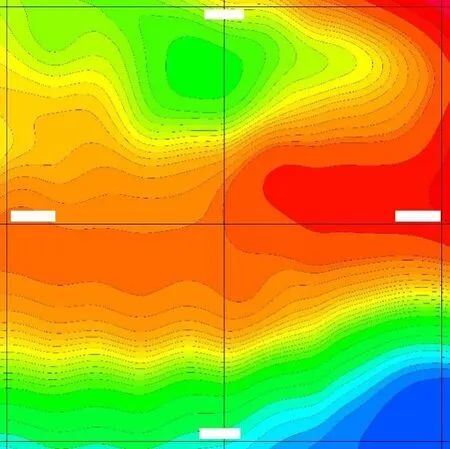
圖9 地面磁法△T平面等值線異常圖
飛行獲得的實測數據首先進行了磁測補償以及各種改正等[7-8]。為了對航磁與地磁數據進行對比,將地磁數據進行了向上延拓180 m,對比航磁與地磁△T平面等值線異常圖,兩者在位置、范圍、走向、形態與異常中心等特征基本一致,對應良好,說明該無人機磁法測量系統可以用于野外的航空磁法勘探。
6 結語
經過實際測量試驗,該無人機航測系統在含磁性礦物的礦床勘探中應用是有效的,可以在大面積測量中取代地面磁法測量和有人機航空磁法測量,尤其在植被覆蓋區和山區,施工難度要求不高,快速圈定找礦靶區,降低勘探成本。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
