基于粒子群算法的公路自行車賽跟騎策略研究
2022-10-13 06:15:18王梓涵趙鵬飛陳勁宇
科技資訊 2022年20期
王梓涵 趙鵬飛 陳勁宇
(1.吉林大學電子科學與工程學院;2.吉林大學地球探測科學與技術學院 吉林長春 130000)
該文以確定團隊計時賽中的最佳跟騎策略為研究目的,以建立混合數學模型和粒子群算法實現為主要方法,應用范圍是5 種經典的騎手和全部種類的計時賽賽道,有著對場景以及團隊成員的高度的適應能力,具有較高的應用意義。
1 研究背景
針對自行車團隊計時賽,我們依照不同賽手的身體素質和對不同種地段的適應能力,將賽手劃分為5類:計時賽專家、拳擊手、攀巖者、短跑運動員、多面手。其中,計時賽專家擁有豐富的計時賽經驗,拳擊手能適應短距離陡坡的地段,攀巖者能適應長距離緩坡的地段,短跑運動員有著較強的爆發力,多面手對全部地形都有著較好的適應能力。
研究人員選取3條賽道,分別是:2021年東京奧運會的計時賽賽道、比利時弗蘭德斯的UCI 世界錦標賽計時賽賽道、2020 年意大利伊莫拉市UCI 世界錦標賽賽道。通過查閱相關材料,研究人員得到這3 種賽道的海拔、坡度、長度等基本信息。這些物理因素將影響到研究人員建立的模型形式,這些數據也可以反過來檢驗模型的可靠性。
2 研究方法
2.1 模型的建立
當騎手功率P越接近Pmax時,P的增加會變得越困難,同時,P越大,騎手越易疲勞,P也就傾向于下降。這構成了功率P對自身的負反饋[1]。

式中,P(x)為騎手的實際功率;Pmax(x)為騎手能提供的最大功率;vF為疲勞速率;Fnat為自然疲勞指數;rF為恢復速率。
根據相關文獻,疲勞系數f滿足[2]

式中,α為比例系數;PP和MP分別為騎手的最大無氧功率和最小無氧功率。
Fnat隨著功率和地勢的變化而變化。當功率越大或者地勢越陡峭,Fnat越大,人就越易疲憊。我們假設Fnat滿足[3]

式中,θ為賽道x處的坡度,值為正值時為上坡,反之則為下坡。
將該模型運用到5 種騎手,使用Matlab 計算出他們在3種不同賽道上的最佳功率曲線,如圖1所示。
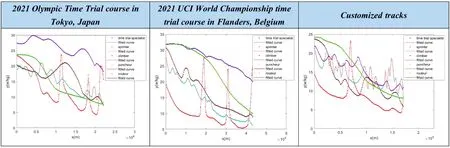
圖1 5類騎手分別在3條賽道上的最佳功率曲線
由此可以看出,不同類別的騎手有著彼此不同的的擅長領域,在不同的地形上的表現差異很大。
綜合以上分析,6人組成一隊時,應根據騎手對不同賽道的適應程度,選取不同種類、不同數量的騎手來組成團隊。
2.2 粒子群算法
當一個人跟在前一個人后面騎行時,前者所受到的風的阻力將大大減小。我們令車隊中的每個隊員保持相差不大的速度共同前行,通過變化領騎者,使整個車隊既能節省體能,又能保持更快的速度。
我們以“團隊到達終點所需要的時間最短”為目標函數,即
當與前一人相距1 m 時,風阻對后一人的作用將降為原來的65%[4]。結合牛頓第二定律,確立通過以下約束條件實現領騎的最佳安排。
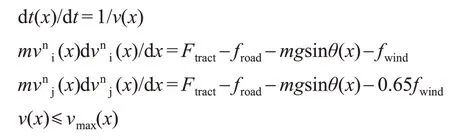
其中,Ftract為運動員提供給自身的牽引力;froad為路面對自行車的摩擦力;fwind為風對自行車的阻力;vi(x)vi(x)為跟騎者的速度;vj(x)為領騎者的速度;上角標n為隊員序數。
令團隊速度為團隊中最慢隊員的速度,即

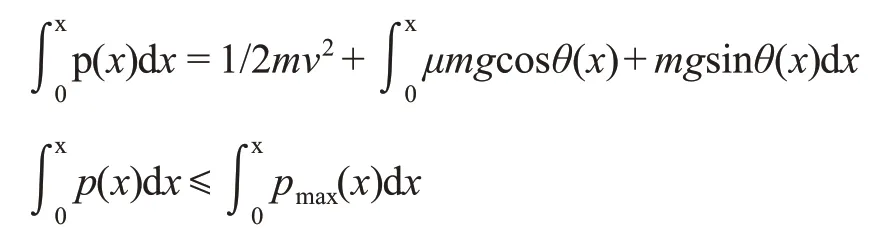
下面考慮領騎者的變換。跟騎者由于受到更小的阻力,因此會有體能的積累,用功率的積累值Pacc來表示。當Pacc達到閾值時,該人成為領騎者[5]。
基于上述分析,研究人員通過粒子群算法[6]解決隊員的選取和領騎者和領騎時間的安排的問題。
首先,建立六維坐標系,6 個維度分別代表代表6名隊員的選取,取值為1~5。從1~5 分別代表:攀爬者、拳擊手、多面手、短跑運動員、計時賽專家。
第i粒子點的Xi坐標為(x1i,x2i,…,x6i),代表第i種隊員選取方式[7]。為了防止由于某種類型的運動員特別能適應某種地段,而造成的團隊中的成員全部為該類運動員的情況發生,限定每類隊員不能超過2個。
隨機選定符合約束條件的10個粒子點,計算目標函數值,并根據速度更新公式和位置更新公式(下式)更新粒子點,要求更新的粒子點符合約束條件,不斷迭代優化目標函數,最終得到最優解[8]。

其中,w為慣性因子,c1、c2為學習因子,是一常數。
3 結果與分析
研究人員計算出了3種賽道組員的最佳選取方式和團隊用時。將其與單人騎行耗時最短和第二短的騎手用時進行對比,具體見表1。

表1 完成比賽的團隊用時與個人用時
賽道一和賽道三的團隊用時比個人最短時間還要短。賽道二雖然前者比后者長,但也比第二短的時間要少。研究人員以賽道三為例,分析領騎安排方案。從表1 中得知,賽道三的隊員組成為“223355”。他們的功率曲線見圖2。
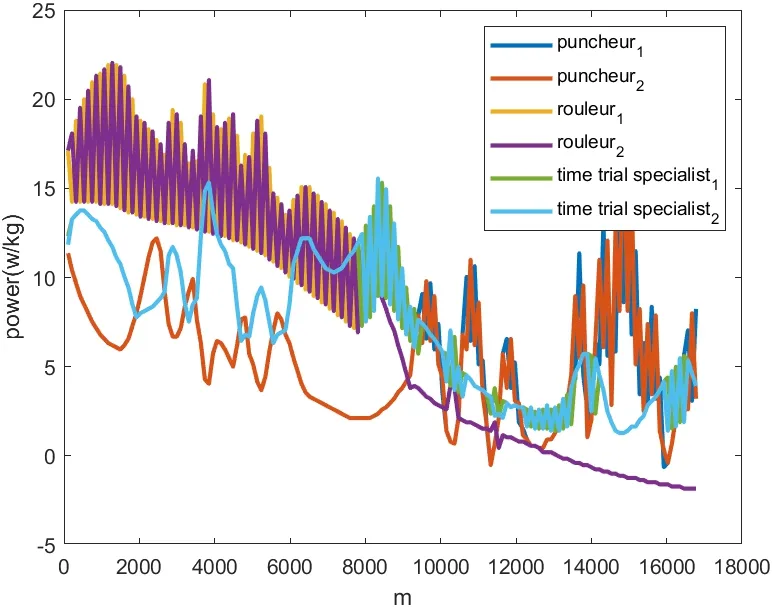
圖2 賽道三的團隊成員的功率曲線變化情況
根據功率曲線進行積分,可以求出不同時間團隊中的隊員順序,結果如圖3所示。其中,灰色代表多面手,黑色代表拳擊手,白色代表計時賽專家。
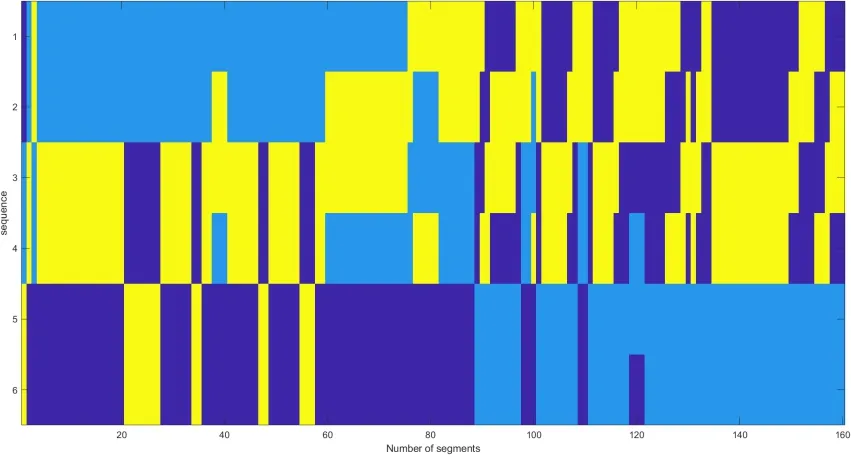
圖3 賽道三的團隊中領隊變化情況
上述結果與賽道的實際情況和不同類別的運動員的擅長之處都吻合得很好,表明了所建立的模型與求解方式是合理的。
4 結語
通過上述分析能夠得到如下結論:領騎的選手功率值最大,同種類的選手在一段路程內不停地交替領騎的位置,直到二者的功率曲線下降到足夠低處;當同類型的選手處于跟騎位置時,功率曲線重合;多面手在前半段領騎,后半段由計時賽專家和拳擊手拳擊手分別交替領騎;多面手和計時賽專家對不同賽道的適應能力更強,發揮更加平穩;盡管多面手的發揮穩定程度要大于計時賽專家,但由于沒有受過專業訓練,相較于計時賽專家,多面手的無氧功率的總的下降幅度更大。因此,團隊計時賽中,為了取得最好的成績,應當根據賽手的體能素質來合理安排領騎與跟騎策略。
