挖掘機動作協調性多指標綜合評價方法
2022-10-17 14:37:32陳俊翔高春瑩
液壓與氣動 2022年10期
陳俊翔, 高春瑩, 李 智, 吳 璇, 艾 超,2
(1.燕山大學 河北省重型機械流體動力傳輸與控制實驗室, 河北 秦皇島 066004;2.燕山大學 先進鍛壓成型技術與科學教育部重點實驗室, 河北 秦皇島 066004)
引言
挖掘機作為土石方工程的主要施工機械,在城市建設、礦產資源開采、水利電力工程等方面發揮著重要作用[1]。隨著我國經濟社會的發展和綜合國力的增強,市場對挖掘機的需求量大大提升,并且對挖掘機的性能有了更高的要求[2]。評價挖掘機性能優劣的一個重要方面為執行機構動作的協調性。挖掘機作為具有多自由度的工程機械,在作業中需要多個執行機構同時進行工作,因此要求其具有良好的動作協調性。挖掘機在作業過程中出現的沖擊、吸空、反應滯后等現象,對挖掘機的安全性和工作效率有很大影響。如何提升挖掘機動作協調性和如何精準評價挖掘機動作協調性,一直是行業研究的難點。
近年來,許多專家學者對挖掘機等產品進行過評價。劉敏等[3]曾應用灰色綜合評判方法對液壓挖掘機的性能進行評價,其采用專家咨詢法直接確定各評價指標的權重系數,主觀因素影響較大,導致指標評價值不準確且可信度較低。屈福政等[4]建立了灰色模糊優選模型,對于指標評價值的確定,其只建立了一種隸屬函數,沒有體現不同評價指標自身的特點,造成評價指標值不夠精確。王卓等[5]采用模糊層次分析法對液力緩速器進行制動性能綜合評價,對權重系數的計算較為客觀,但其采用線性加法合成,存在評價值較高的指標補償評價值較低的指標的現象。綜上所述,在一個評價體系中,權重系數的處理、隸屬函數的建立以及合成方法的選擇會對最終評價結果造成較大影響。
劉艷秋等[6]曾對多要素評價中權重系數的確定方法進行系統梳理。本研究應用多指標綜合評價法對挖掘機動作協調性進行量化評分,通過分析各個方法的優劣,采用層次分析法確定權重;構造判斷矩陣,將專家或操作手的經驗轉化成權重系數的思維過程數學化,避免過早地引入模糊信息,使得權重系數結果更加客觀[7];依據評價指標特點建立相應隸屬函數,使指標評價值準確性提高;采用加法合成,將指標評價值與權重進行結合,最終得到挖掘機動作協調性的綜合評分。
1 評價體系的建立
挖掘機動作協調性受多個因素影響,如動作響應是否及時,速度是否合適,運動是否平穩等。當需要對多個指標、多個單位同時進行評價時,通常采用多指標綜合評價方法。這種評價方法的關鍵在于評價指標、權重系數和隸屬函數的確定以及合成關系的處理。本研究將多指標綜合評價法應用于挖掘機動作協調性評價之中,將協調性這一定性指標進行量化評分,以直觀的形式體現挖掘機動作協調性優劣。評價步驟如下:
(1) 明確評價對象;
(2) 確定評價指標;
(3) 確定量化指標權重及評價值;
(4) 確定合成關系,求綜合評價結果。
2 明確評價指標
2.1 評價指標選取原則
建立評價指標體系是對系統進行綜合評價的基礎。評價指標的選取是否合理直接影響到綜合評價結果的科學性與準確性。確定系統的評價指標必須按照一定的原則進行分析與判斷[8]:
(1) 系統性原則 動作協調性是多因素作用下的結果,對每個影響因素設立相應的評價標準,系統性地對動作整體進行評價;
(2) 可操作性原則 用于評價動作協調性的指標定義要清楚,便于采集數據和收集情況,避免帶來不必要的麻煩;
(3) 突出性原則 指標的選擇要全面,但每個指標對動作協調性的影響程度不同,應該區分主次;
(4) 定性與定量相結合原則 可以在定性分析的基礎上進行量化處理。
2.2 評價指標
基于以上4個原則,確定挖掘機動作協調性評價指標:
(1) 動態響應性 先導手柄輸入信號與執行機構輸出之間的時間差值;
(2) 速度 出廠時機器定義每個動作規定行程與規定運動時間的比值;
(3) 沖擊 執行機構啟動階段的壓力超調量;
(4) 相對速度 當加入或退出某些執行機構動作時,剩余執行機構的速度變化量;
(5) 回轉漂移 回轉先導手柄信號停止后,挖掘機回轉平臺由于慣性等原因的溜車角度;
(6) 精控性 執行機構的速度(或角速度)和手柄輸入信號之間的線性度,主要體現在手柄微操作中,當需要對執行機構速度進行小范圍精細調整時,速度變化與手柄信號變化的跟隨性;
(7) 吸空 運動過程中,液壓缸大小腔壓力突然接近0 MPa或者接近規定的吸空值,用接近吸空值的時間長短評價吸空。
3 確定評價指標權重及量化指標的評價值
3.1 確定評價指標權重
針對影響挖掘機動作協調性的多指標,采用層次分析法確定各指標的權重。權重的確定,原則上是根據專家或操作手經驗,難點在于經驗是一個模糊的概念,而權重是一組準確的數據,從人感知到數據量化的過程是難以實現的。借助層次分析法,專家或操作手只需提供各個指標的相對重要程度,采用如表1所示的九尺度判斷法,在所有指標中,兩兩進行比較做出判斷矩陣[9],判斷矩陣建立后,便可以從中求解出準確的權重系數,從而實現由人感知到量化數據的轉化。
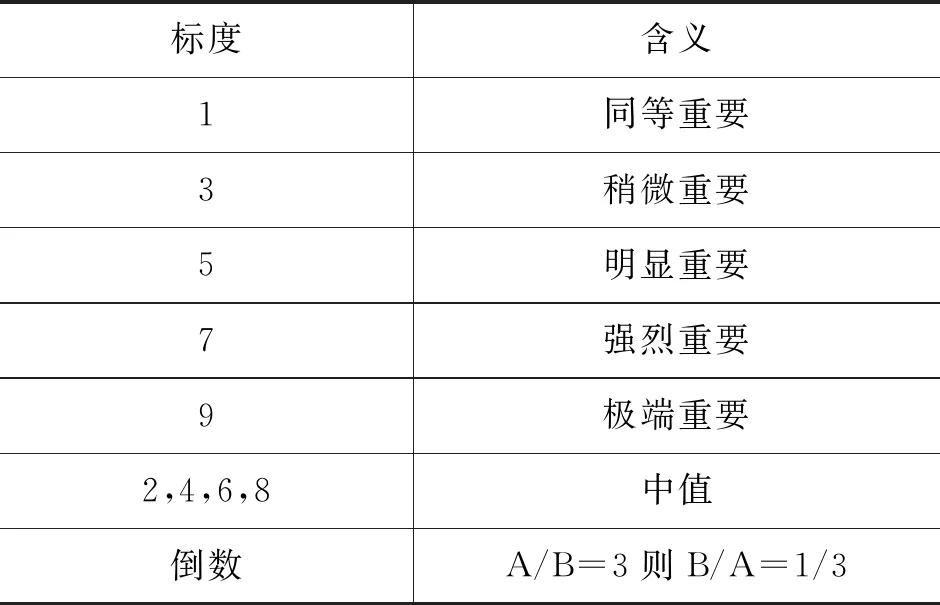
表1 重要程度表
針對影響挖掘機動作協調性的多指標,建立了表2所示的判斷矩陣,判斷矩陣收集影響挖掘機動作協調性指標的相對重要程度,用以求解各個指標的權重系數。判斷矩陣中aij是表示第i行指標與第j列指標的相對重要程度,其中i=1,2,3,4,5,6,7;j=1,2,3,4,5,6,7。共統計了7個指標,構成七維判斷矩陣,i=j時,對應判斷矩陣中2個相同指標,同等重要記為1。
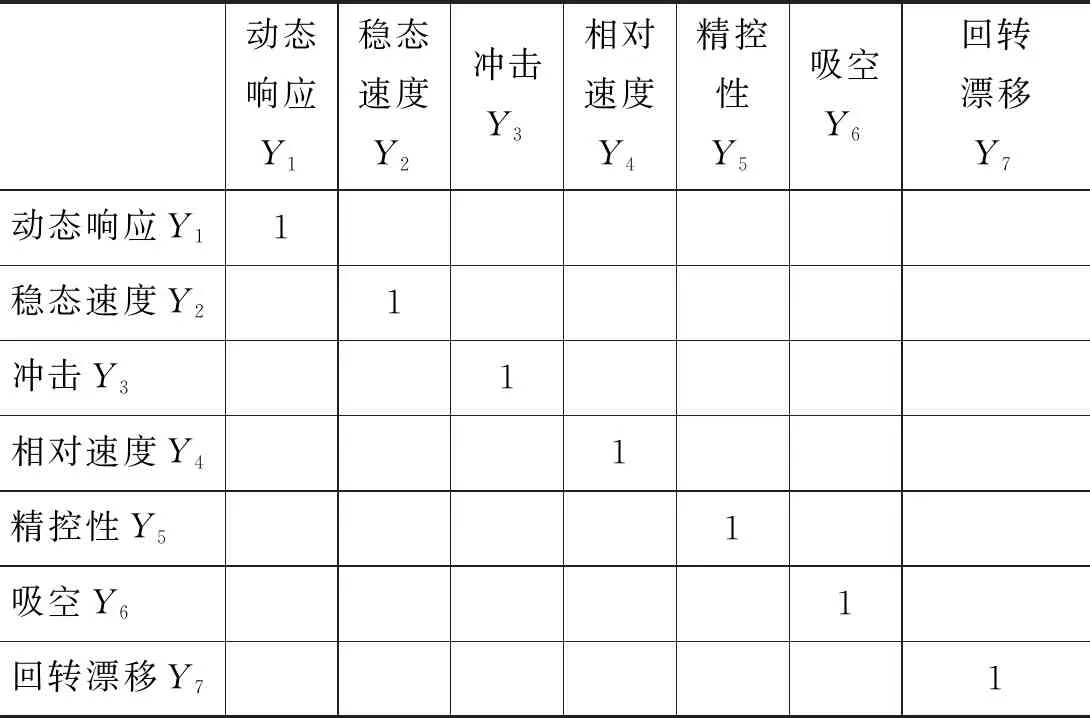
表2 判斷矩陣
一致性檢驗:在對兩兩指標進行重要性比較時,由于評審專家的評價的主觀性,會出現指標1>指標2、指標1<指標3、指標2>指標3的誤判,針對這一問題,需要對判斷矩陣的可行性即一致性進行檢驗[10]。
正互反矩陣中aij×aji=1,因此判斷矩陣為正互反矩陣,如果正互反矩陣滿足aij×ajk=aik,則為一致矩陣。在使用判斷矩陣求解權重之前,必須要進行一致性檢驗,通過一致性檢驗的判斷矩陣,求解出來的權重才具有實際意義。
理想的一致矩陣秩為1,并且只有1個最大特征值為n,其余都為0。判斷矩陣越不一致時,最大特征值與n相差就越大。
一致性檢驗是通過計算一致性比例進行的。一致性比例CR與一致性指標CI、平均隨機一致性指標RI間的關系為:
(1)
一致性指標計算公式為:
(2)
式中,λmax—— 判斷矩陣最大特征值
n—— 判斷矩陣維數
平均隨機一致性指標RI只與判斷矩陣的維數n有關,維數不同對應的平均隨機一致性指標也不同,不需要計算,通過查閱得到,表3是部分維數對應的平均隨機一致性指標。

表3 一致性指標RI
若求解得到的一致性比例CR<0.1,則可以認為判斷矩陣的一致性可以接受[11]。一致性不可以接受,則需要改變判斷矩陣中的元素,重新計算CR,直到可以接受為止[12]。
判斷矩陣可以通過算術平均法、幾何平均法以及特征值法計算出權重。此評價方法中采用特征值法進行求解,對最大特征值所對應的特征向量進行歸一化處理,得到權向量。
3.2 確定量化指標的評價值
評價挖掘機動作協調性需要量化多個指標,但不同指標的計量單位不同,量化值不能直接合成[8],需要進行無量綱化處理,即通過函數運算來消除量綱單位的影響,這就需要根據評價指標的特點建立相應的隸屬函數。通過對隸屬函數進行計算便可得到量化指標的評價值。
(1) 動態響應性:
(3)
式中,x1—— 實際測試的時間差值
a1—— 操作手反應時間加手柄死區行程時間
b1—— 挖掘機出廠設置的手柄輸入與執行機構輸出之間的最大響應時間
K—— 判別指標是否達到最低要求的邏輯值
(2) 穩態速度:
(4)
式中,x2—— 實測挖掘機執行機構速度
a2—— 可接受速度的最小值
b2—— 可接受速度的最大值
(3) 沖擊:
(5)
式中,pmax—— 啟動階段最大超調下的壓力
p—— 啟動后穩態時的壓力
(4) 相對速度:
(6)
式中, Δv—— 當加入或退出某執行機構動作時,對應其他動作在此階段的速度變化量
v—— 未加入或退出之前其他動作的速度
(5) 精控性:
(7)
式中, Δvmax—— 理論曲線與實際曲線在相同的輸入信號下輸出的最大差值
v0—— 理論曲線與實際曲線在最小輸入信號下的速度
vn—— 理論曲線與實際曲線在最大輸入信號下的速度
(6) 吸空:
(8)
式中,x6—— 實測吸空時間
a6—— 允許的吸空值
(7) 回轉制動:
(9)
式中,x7—— 實測漂移角度
a7—— 回轉平臺允許的漂移角度
4 確定合成關系及仿真驗證
4.1 確定合成關系
在多指標綜合評價體系中,單個指標的評價值與權重通過適當的方法合成可以得到系統的綜合評價結果。通常采用的合成方法有加法合成、乘法合成和加乘混合等。不同的合成方法其數學表達式不同,具有的數學意義不同,因此所得到的綜合評價結果也會存在差異,應根據評價系統的特點選擇合適的合成方法。在評價挖掘機動作協調性中運用加法合成進行各指標評價值與權重的綜合。
加法合成的公式如下:
(10)
(11)
式中,X—— 被評價事物得到的綜合評價結果
Wi—— 各評價指標的權重
Yi—— 單個評價指標的評價值
N—— 評價指標個數
Ki—— 判別各評價指標是否達到最低要求的邏輯值,若達到最低要求Ki為1,否則為0
在加法合成中,各指標評價值間可以相互補償,評價值較高的指標可以補償評價值較低的指標,如果某個指標的評價值過低,卻被其他指標補償,導致最終的綜合評價值依然較高,這種情況顯然是不合理的。采用有約束的線性加權辦法能很好的解決加法合成這一缺點,當某個指標的評價值過低時,將邏輯系數K取0,則最終的綜合評價結果為0,使之不具有評價意義[13]。
4.2 多指標綜合評價方案應用
以某公司挖掘機為例,使用多指標綜合評價法對斗桿挖掘加鏟斗挖掘復合動作協調性進行評價。應用MATLAB-Simulink搭建多指標綜合評價程序,將試驗采集數據輸入程序中后,即可得到挖掘機復合動作協調性的綜合評價結果,評價程序如圖1所示。
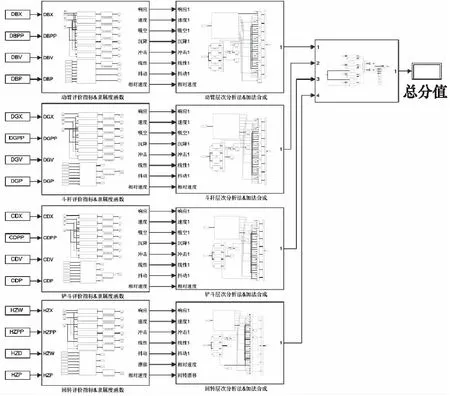
圖1 復合動作MATLAB-Simulink評價程序
1) 確定權重系數
判斷矩陣、權重分配表、各指標評價值如表4~表6所示。從權重分配表可以看出,復合動作協調性中相對速度所占的權重較大。
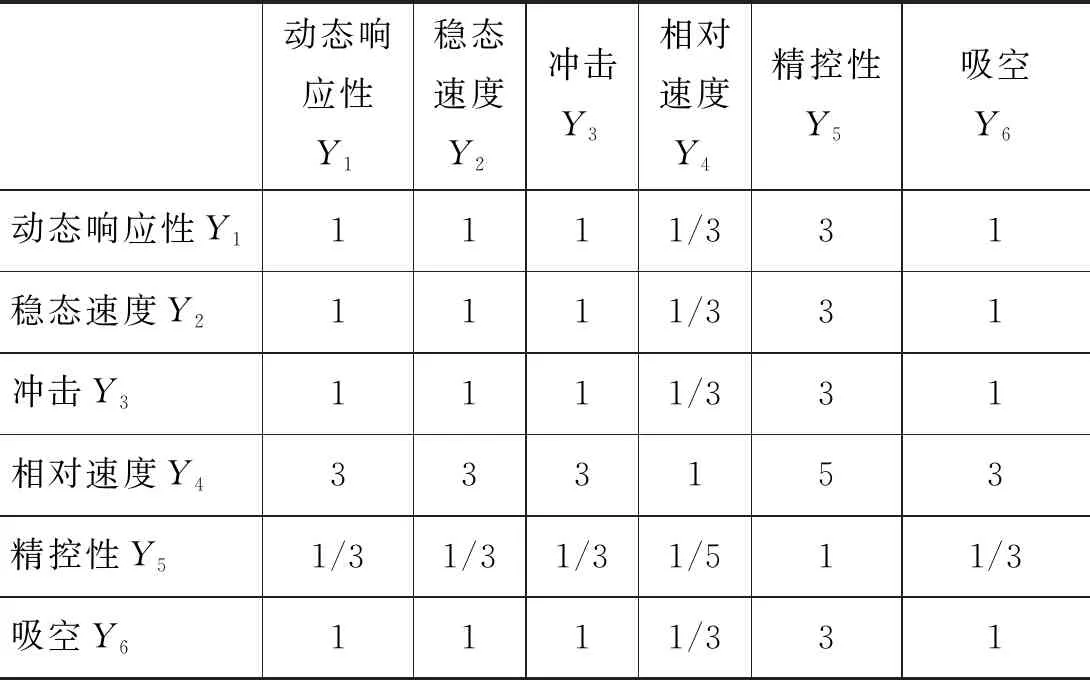
表4 判斷矩陣
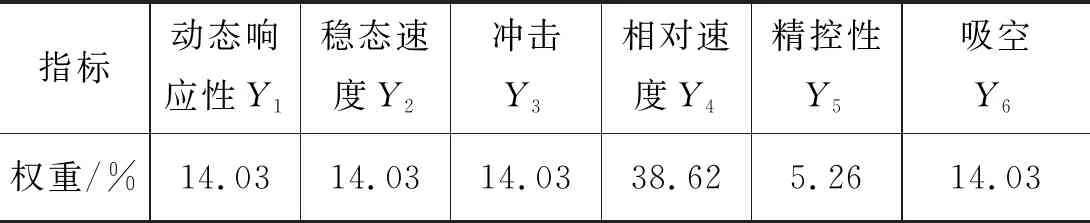
表5 權重分配表
2) 確定評價指標及其評價值
讀取先導壓力開始上升時間與液壓缸開始動作時間的差值Δt,斗桿Δt1為0.26 s,鏟斗Δt2為0.07 s,斗桿的動態響應有待提高。將時間差Δt代入動態響應隸屬函數中并與動態響應性所占權重相乘,即可得到復合動作中動態響應單項指標評價值為66。
執行機構行程與時間比值,得到穩態平均速度,其中斗桿挖掘的穩態平均速度為468 mm/s,鏟斗挖掘的穩態平均速度為342 mm/s,將穩態平均速度v代入到速度隸屬函數中并與速度所占權重相乘,即可得到復合動作中速度單項指標評價值為72.5。
讀取挖掘過程中液壓缸大腔壓力的最大超調值Δσ,斗桿Δσ為12.9 MPa,鏟斗Δσ為16.5 MPa,從曲線及超調值可以看出,挖掘機的壓力沖擊較大。將超調值Δσ代入沖擊的隸屬函數中并與沖擊所占權重相乘,即可得到復合動作中沖擊單項指標評價值為63。
從斗桿和鏟斗液壓缸大腔壓力數據中可以看出,液壓缸大腔壓力突然接近0 MPa或者接近規定的吸空值的時間極短,完全小于吸空允許的閾值,即斗桿挖掘和鏟斗挖掘中不存在吸空現象, 吸空這項指標的評價值均為100,因此復合動作吸空評價值為100。
在斗桿挖掘作業時加入鏟斗動作,由于流量變化會導致斗桿運動速度突變,讀取斗桿運動速度變化量Δv為494 mm/s。在斗桿挖掘加鏟斗挖掘復合動作時,斗桿動作退出后,鏟斗的運動速度也會產生變化,讀取鏟斗速度變化量Δv為95 mm/s,從曲線及速度變化值可以看出,挖掘機在執行機構增減過程中的相對速度變化較大。將其帶入到相對運動速度的隸屬函數中并與相對速度指標所占權重相乘,即可得到復合動作中相對速度變化單項指標評價值為54。
采用最小二乘法擬合先導壓力-速度關系,得到實際曲線,根據其輸入信號理論計算其線性度函數關系,得到其理論曲線,讀取理論曲線與實際曲線在相同的輸入信號下輸出的最大差值Δvmax:斗桿Δvmax為206 mm/s,鏟斗Δvmax為148 mm/s;鏟斗理論曲線與實際曲線在最小輸入信號下速度v0:斗桿Δv0為459 mm/s,鏟斗Δv0為4 mm/s;理論曲線與實際曲線在最大輸入信號下的速度vn:斗桿vn為871 mm/s,鏟斗vn為398 mm/s,將其代入精控性隸屬函數中并與精控性指標所占權重相乘,即可得到復合動作中精控性單項指標評價值為56。從精控性曲線中可進一步的看出,手柄輸入信號與執行機構輸出信號之間的線性度較差。
綜上,將試驗獲得的數據經處理后代入相應的隸屬函數中,可得各個指標的評價值,匯總如表6所示。
從圖2~圖11中可以看出,某型號挖掘機在斗桿挖掘加鏟斗挖掘復合動作中,壓力沖擊、相對速度的變化均較大,精控性較差,與表6中沖擊、相對速度、精控性的的評分基本保持一致。因此,需要減小挖掘機壓力沖擊、相對速度變化,提高其精控性。最后,采用加法合成法進行綜合計算,得到斗桿挖掘加鏟斗挖掘復合動作的綜合評價值為66.1。
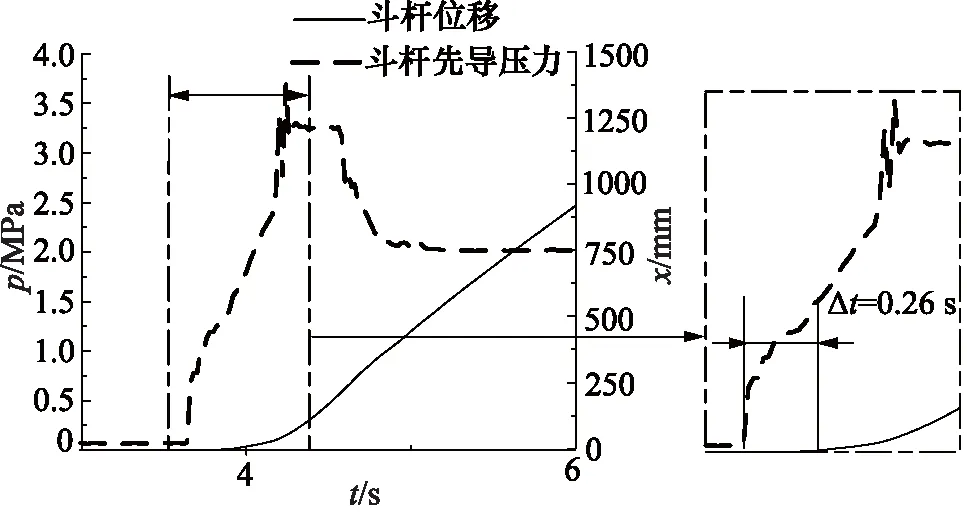
圖2 斗桿挖掘動態響應性

圖3 鏟斗挖掘動態響應性
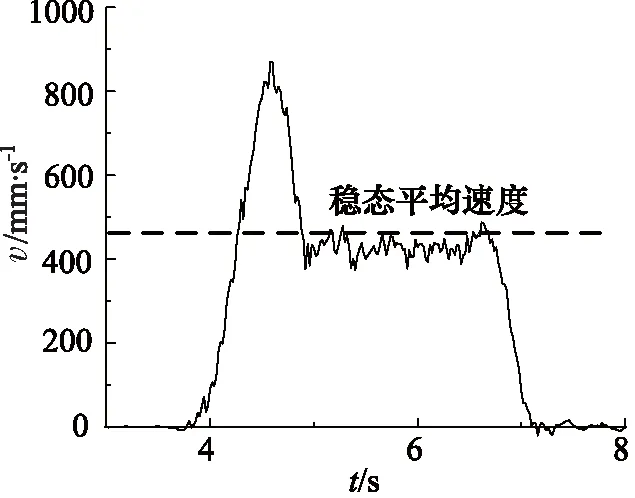
圖4 斗桿挖掘速度
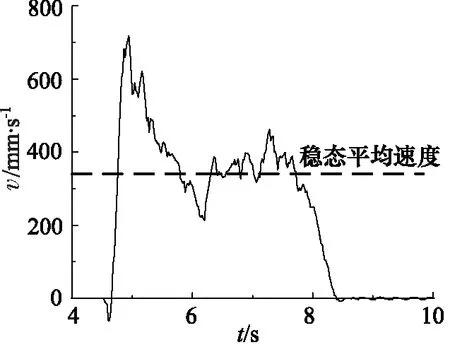
圖5 鏟斗挖掘速度
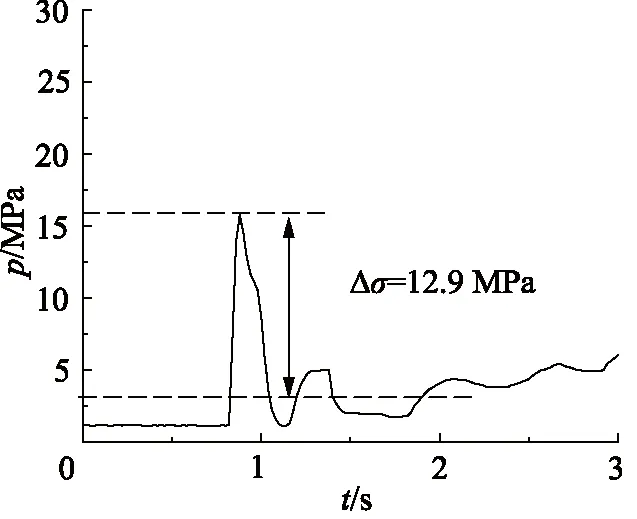
圖6 斗桿挖掘沖擊
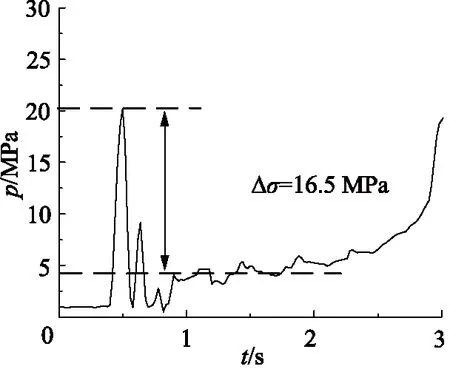
圖7 鏟斗挖掘沖擊
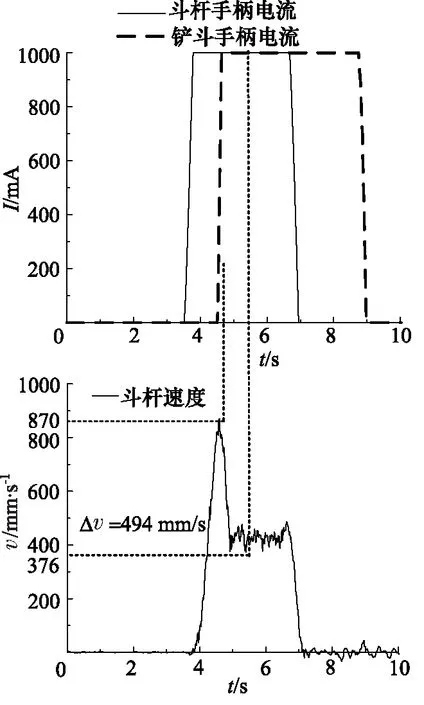
圖8 鏟斗進入相對速度

圖9 斗桿退出相對速度
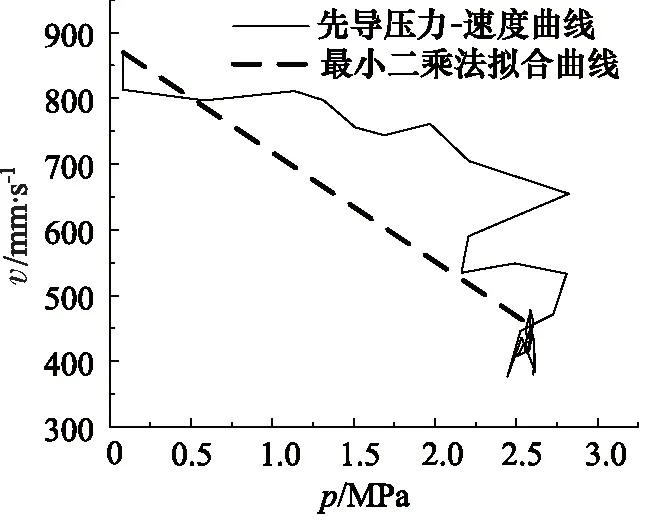
圖10 斗桿挖掘精控性
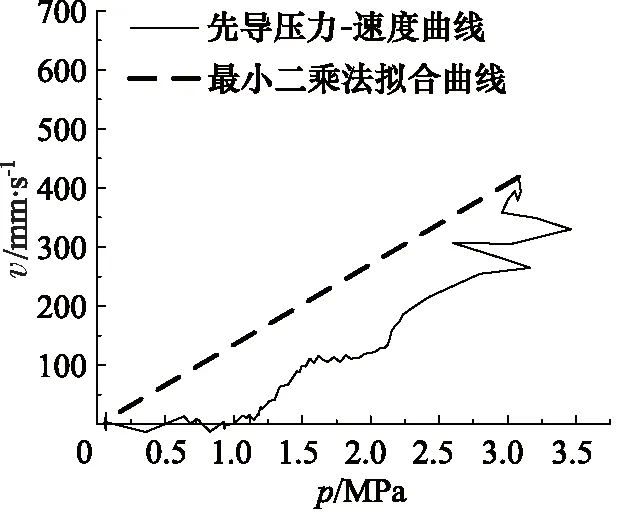
圖11 鏟斗挖掘精控性
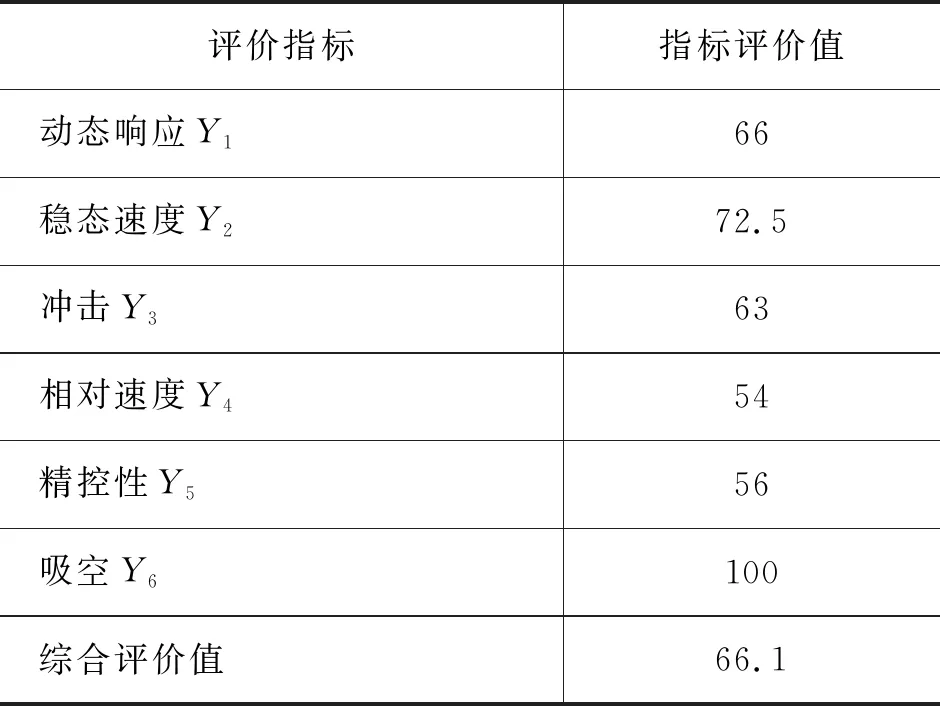
表6 各指標評價值
5 結論
針對挖掘機動作協調性難以客觀評價的問題,在較少定量信息支持的前提下,以影響挖掘機動作協調性的多指標為出發點,通過層次分析法,達到了將操作手經驗的模糊信息轉化為精確權重系數的目的,從而得到了一組既符合實際又有理論依據的權重,并對各個指標分別應用合適的隸屬函數計算其評價值,完成了評價中多指標、多準則的復雜評價任務,以加權求和的方法計算評價值,考慮加法合成存在各指標間的線性補償,引入邏輯系數K對評價結果進行修正,克服了其他指標對某個或某些極低評價值的補償導致評價結果不準確的問題。基于某型號挖掘機的實驗數據,進行了MATLAB-Simulink仿真驗證,得到較為客觀的綜合評價結果,該評價方法可以定量評價挖掘機動作協調性,對研發人員基于該評價結果做出分析決策具有實際指導意義。
猜你喜歡
石油瀝青(2021年4期)2021-10-14 08:50:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
文理導航·科普童話(2016年7期)2017-02-04 15:09:20
小天使·四年級語數英綜合(2016年11期)2016-11-29 22:37:30
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
俄羅斯問題研究(2012年1期)2012-03-25 09:54:51
體育師友(2012年4期)2012-03-20 15:30:10
