電液振動臺正弦振動自適應(yīng)控制方法
2022-10-17 14:22:56李昭陽關(guān)廣豐王海濤
液壓與氣動 2022年10期
李昭陽, 關(guān)廣豐, 熊 偉, 王海濤
(大連海事大學(xué) 船舶與海洋工程學(xué)院, 遼寧 大連 116026)
引言
電液振動臺在振動實驗中發(fā)揮的作用越來越關(guān)鍵。正弦振動是振動實驗的重要組成部分,通常有定頻、掃頻兩種實驗?zāi)J健S捎谠诋a(chǎn)品有效性檢驗中具備重要作用,其在汽車、船舶、航空航天等各個領(lǐng)域的應(yīng)用日益普及[1-3]。
雖然電液振動實驗臺輸出力矩大、響應(yīng)速度快,但受液壓系統(tǒng)頻寬的限制,正弦振動實驗中加速度輸出信號跟蹤精度較低。同時,系統(tǒng)中存在的死區(qū)、摩擦力等因素,導(dǎo)致加速度輸出信號波形失真度較大,這極大降低了正弦振動的控制精度[4]。針對波形跟蹤精度低的問題,VASILIS K等[5]基于LMS算法設(shè)計自適應(yīng)逆控制器,進行了波形再現(xiàn)實驗研究;PLETT G L[6]對LMS算法穩(wěn)定性、收斂性以及權(quán)值方程更新等進行了研究;沈剛等[7]基于濾波-x LMS算法進行了單軸電液振動臺隨機波再現(xiàn)實驗研究; 何堯[8]對通過幅相控制補償相位滯后的問題進行了研究。上述研究均采用基于LMS算法的控制策略,能夠有效提高參考信號的跟蹤精度,但算法收斂速度較慢,算法迭代系數(shù)需人為選取, 導(dǎo)致系統(tǒng)控制精度主要取決于操作員的熟練程度。RLS算法利用輸入信號自相關(guān)矩陣的逆代替LMS算法中的迭代系數(shù),實現(xiàn)了迭代步長的自動選取,且將算法收斂速度提高了一個數(shù)量級[9]。通過RLS算法構(gòu)建自適應(yīng)逆控制器,有助于進一步提高波形跟蹤精度。
針對正弦波形失真度問題,很多學(xué)者對諧波抑制控制策略進行了研究。趙勇[10]以LMS算法及其變形為基礎(chǔ),進行了自適應(yīng)諧波抑制控制器設(shè)計。姚建均[11-12]將諧波辨識技術(shù)應(yīng)用于諧波抑制中,基于廣義卡爾曼濾波對加速度諧波進行動態(tài)跟蹤,但要求系統(tǒng)非線性不能過大。現(xiàn)有研究多為單次諧波抑制,在收斂速度和精度上仍舊有提升空間。HAYKIN S[13]提出快速塊LMS算法,其理論基礎(chǔ)源自快速傅里葉變換算法,能夠?qū)崿F(xiàn)卷積和其他相關(guān)算法的快速運算。該算法相較于一般LMS算法,具備計算量少、收斂速度快等優(yōu)點。
本研究提出自適應(yīng)逆控制及諧波抑制復(fù)合控制策略,通過帶遺忘因子的RLS算法構(gòu)建自適應(yīng)逆控制器,提高正弦波形的跟蹤精度。基于快速塊LMS算法構(gòu)建雙次自適應(yīng)諧波抑制控制器,減小系統(tǒng)加速度輸出信號波形失真度。
1 自適應(yīng)逆控制及諧波抑制復(fù)合控制策略
針對正弦振動控制中存在的波形跟蹤精度差、失真度大問題,本研究提出自適應(yīng)逆控制及諧波抑制復(fù)合控制策略,其基本原理如圖1所示。
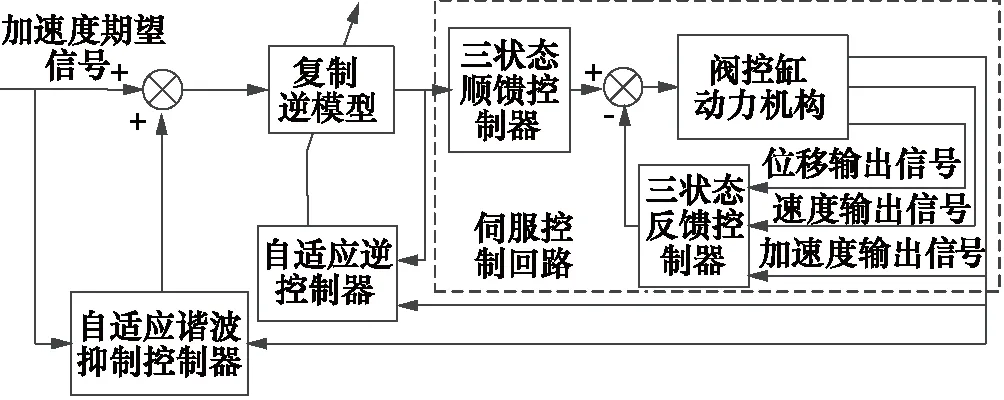
圖1 正弦振動自適應(yīng)逆控制及諧波抑制復(fù)合控制原理圖
在伺服控制回路中,采用三狀態(tài)反饋控制器提高系統(tǒng)阻尼,采用三狀態(tài)順饋控制器拓展加速度系統(tǒng)頻寬, 控制器設(shè)計過程可參見文獻[14]。系統(tǒng)加速度輸出信號作為自適應(yīng)逆控制器和自適應(yīng)諧波抑制控制器的輸入,提高波形跟蹤精度,抑制諧波,提高正弦振動控制精度。
2 自適應(yīng)逆控制器設(shè)計
自適應(yīng)逆控制器利用自適應(yīng)算法在線辨識系統(tǒng)的模型及逆模型,并利用逆模型對輸入信號進行濾波修正,以提高響應(yīng)信號的跟蹤精度,自適應(yīng)逆控制器原理如圖2所示。
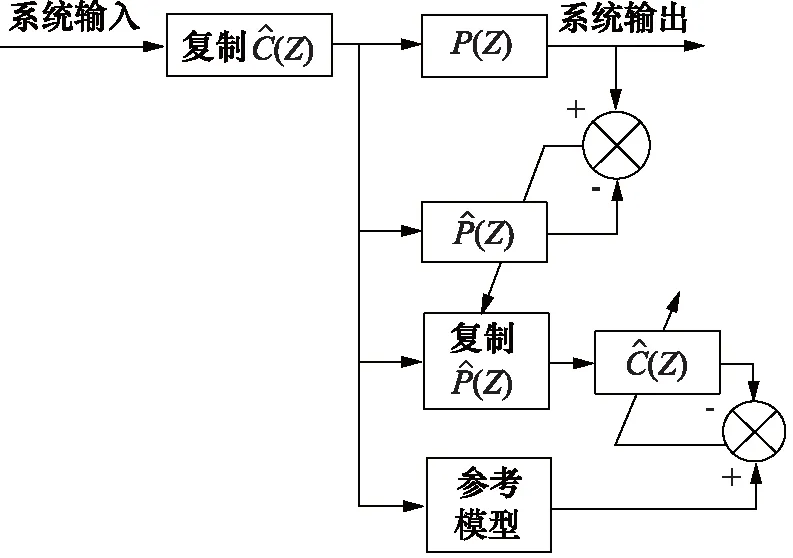
圖2 自適應(yīng)逆控制基本原理圖
(1)
yR=ωR(n-1)u(n)
(2)
eR(n)=dR(n)-yR(n)
(3)
ωR(n)=ωR(n-1)+KH(n)eR(n)
(4)
P(n)=λ-1P(n-1)-λ-1k(n)uH(n)P(n-1)
(5)
式中,u(n) —— 濾波器輸入信號
dR(n) —— 濾波器期望信號
yR(n) —— 濾波器輸出信號
eR(n) —— 誤差信號
H —— 共軛轉(zhuǎn)置符號
λ—— 遺忘因子,其取值范圍一般在0.98~0.995之間
ωR(n) —— 權(quán)向量
K(n) —— 增益向量
P(0)=δ-1I, 當(dāng)系統(tǒng)信噪比較高時, 可取δ=
1×10-6。
3 基于快速塊LMS算法雙次諧波抑制控制器設(shè)計
諧波抑制的基本原理是通過指定頻率的參考信號對自適應(yīng)陷波器的陷波頻率進行調(diào)節(jié),進而利用陷波器實現(xiàn)指定頻率的諧波抑制。單次諧波抑制只需給定一路參考輸入信號,而雙次諧波抑制需要設(shè)定兩路不同頻率的參考輸入信號,雙次諧波抑制控制器原理圖如圖3所示。
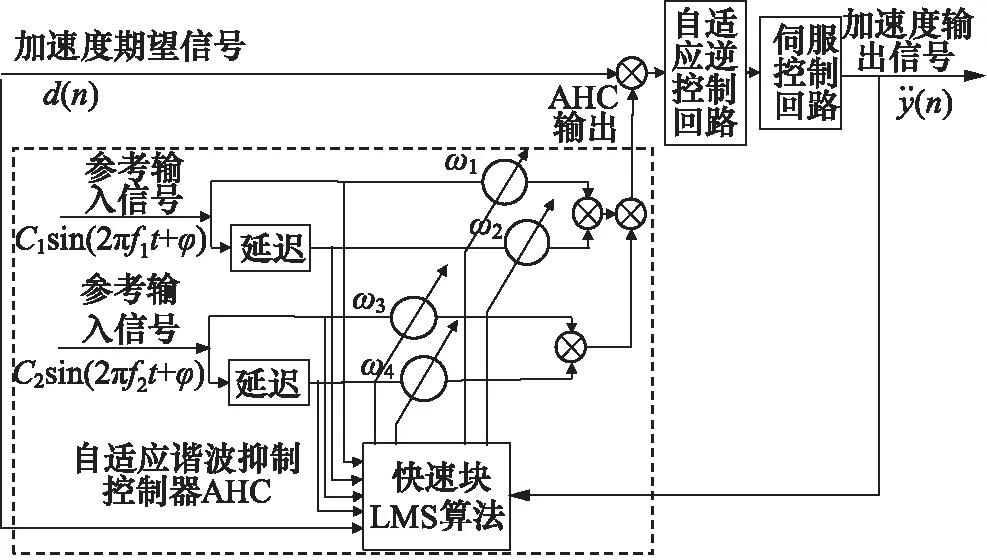
圖3 自適應(yīng)諧波抑制控制器原理圖

自適應(yīng)諧波抑制控制器基于快速塊LMS算法構(gòu)建,快速塊LMS算法計算公式為[13]
n=kN+i
(6)
(7)
(8)
ωL(k)=(1-μα)ωL(k+1)-f(uL(n),eL(n),μ)
(9)
(10)
式中,uL(n) —— 參考輸入信號
yL(n) —— 濾波器輸出信號
eL(n) —— 誤差信號
ωL(n) —— 權(quán)向量
k—— 迭代次數(shù)
N—— 濾波器長度
α—— 權(quán)值遺忘因子
μ—— 步長
i—— 每個塊中的迭代變量,0≤i≤N-1
快速塊LMS算法原理圖如圖4所示。
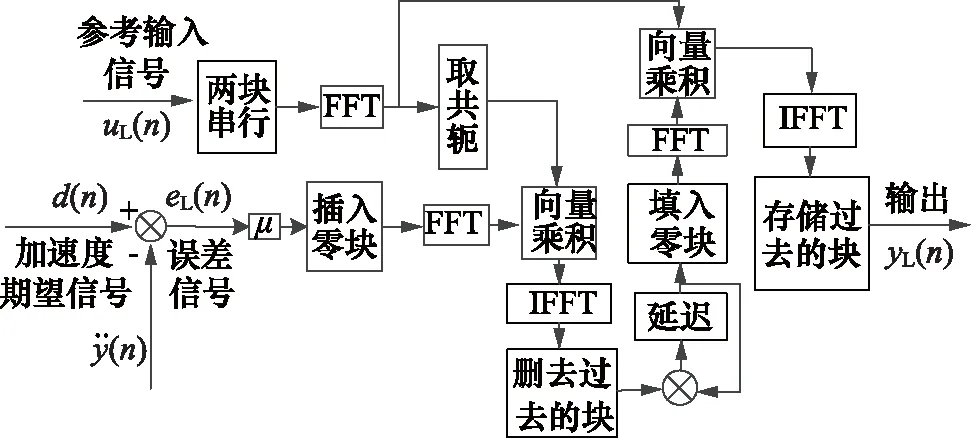
圖4 快速塊LMS算法原理圖
圖4中,F(xiàn)FT表示快速傅里葉變換;IFFT表示快速逆傅里葉變換。雙次諧波抑制中, 快速塊LMS算法有兩路參考輸入信號及其延遲總計4路輸入信號。因此,實際運行過程中共有4路并行快速塊LMS算法。
4 實驗分析
利用圖5所示六自由度電液振動臺的5號缸進行正弦振動實驗研究, 檢驗控制策略的有效性,圖中編號1~6均為振動臺的液壓缸,振動臺參數(shù)如表1所示。
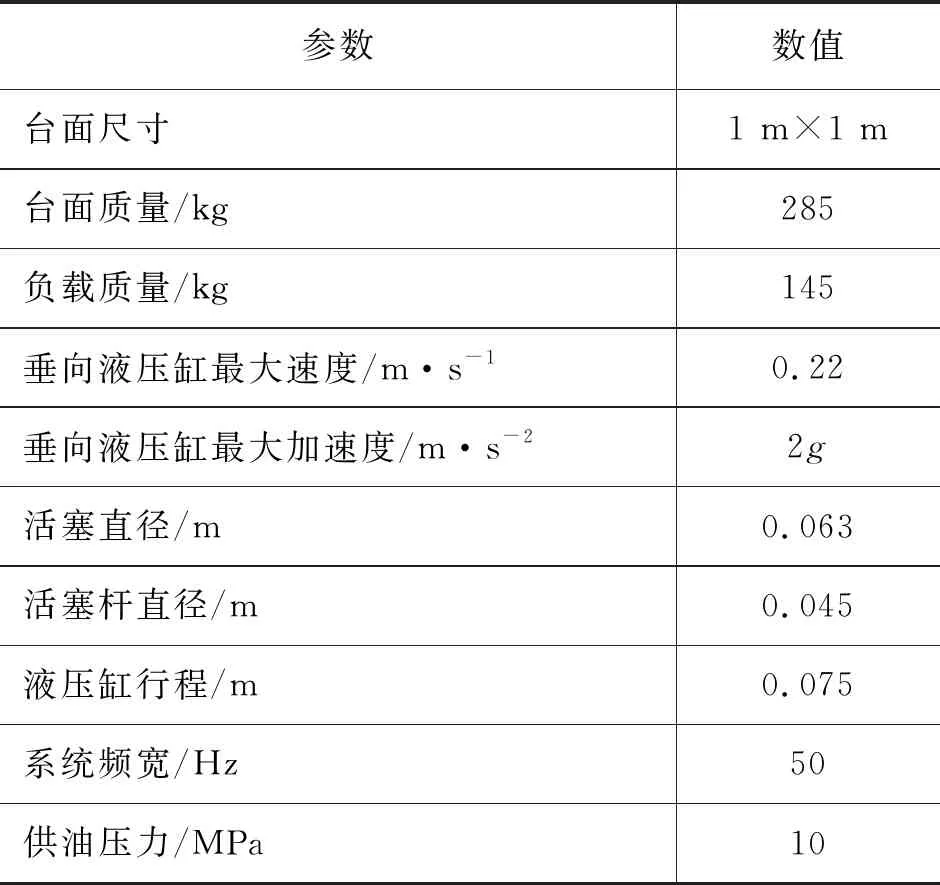
表1 振動臺參數(shù)
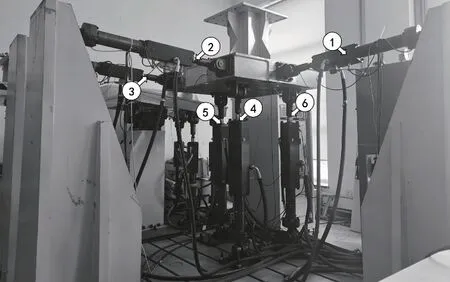
圖5 電液振動臺照片
4.1 波形失真度評價指標(biāo)
依據(jù)液壓振動臺國標(biāo),以THD為加速度波形失真度評價標(biāo)準(zhǔn)[15]。取5次以內(nèi)的諧波分量計算THD,計算公式為:
(11)
式中,A1—— 基波幅值
Ai—— 各次諧波幅值,i=2,3,4,5
4.2 實驗結(jié)果分析
取正弦輸入信號幅值為0.2g,頻率為10 Hz,進行3組實驗研究。第一組僅采用三狀態(tài)控制策略,第二組采用三狀態(tài)控制和自適應(yīng)逆控制策略,第三組采用三狀態(tài)控制、自適應(yīng)逆控制及諧波抑制復(fù)合控制策略。
實驗中,自適應(yīng)逆控制器帶遺忘因子的RLS算法的λ取為0.995,ωR(0)=0。諧波抑制控制器中快速塊LMS算法的α取為0,μ取為1×10-4,濾波器長度取為32階。
第一組實驗中加速度a波形跟蹤曲線和加速度輸出信號幅值譜L(ω)如圖6、圖7所示。
由圖6可知,輸出正弦信號峰峰值為0.265g,10 Hz 處的幅頻特性為-3.58 dB,存在波形滯后問題,波形跟蹤精度較低。
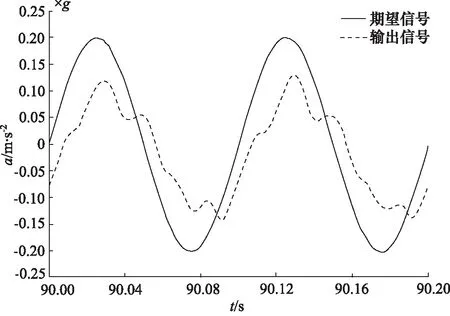
圖6 第一組實驗加速度波形跟蹤曲線
基于圖7,根據(jù)式(11)計算可得第一組實驗中的THD值為18.37%,波形失真比較嚴(yán)重。
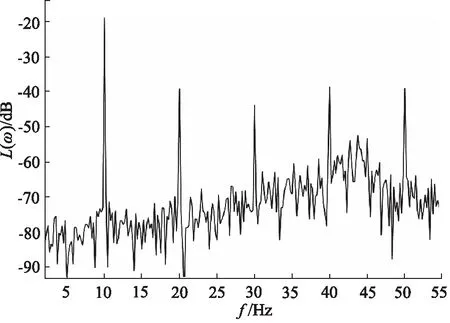
圖7 第一組實驗加速度輸出信號幅值譜
第二組實驗中加速度波形跟蹤曲線和加速度輸出信號幅值譜如圖8、圖9所示。
由圖8可知,輸出正弦信號峰峰值為0.404g,10 Hz 處的幅頻特性為0.09 dB,波形跟蹤精度得到明顯提高。
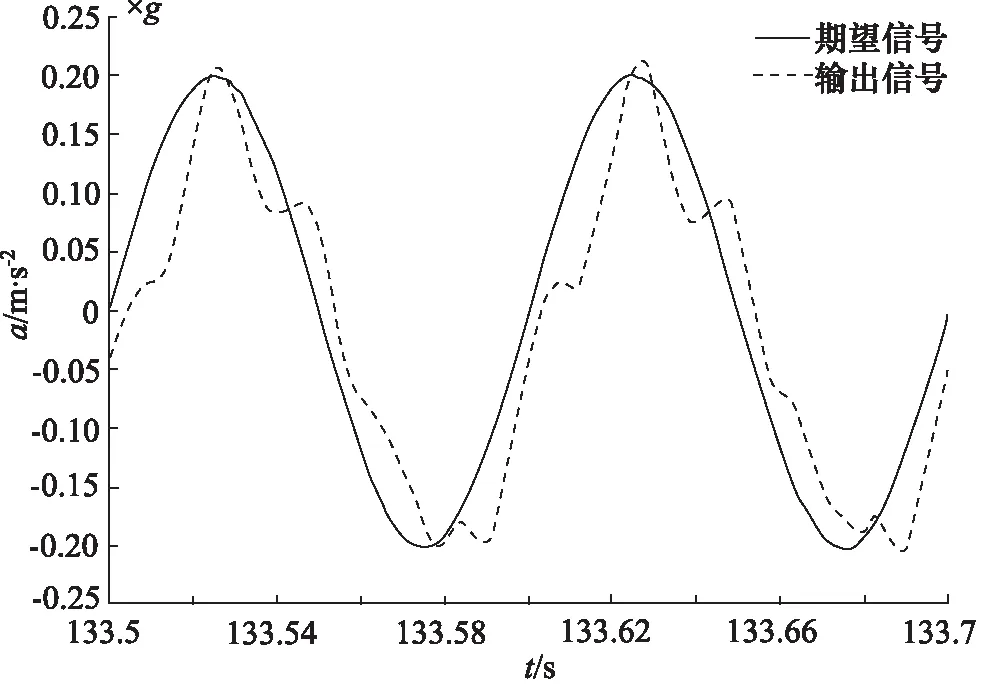
圖8 第二組實驗加速度波形跟蹤曲線
由圖9可計算第二組實驗中的THD值為22.33%,雖然提高了跟蹤精度, 但相比于第一組實驗的波形失真度變大。
由圖9可知, 4次和5次諧波幅值較大,第三組實驗中針對4次和5次諧波進行抑制。諧波抑制控制器參考輸入信號為sin(2π40t)、sin(2π50t),同時抑制4次、5次諧波。加速度波形跟蹤曲線和加速度輸出信號幅值譜如圖10、圖11所示。
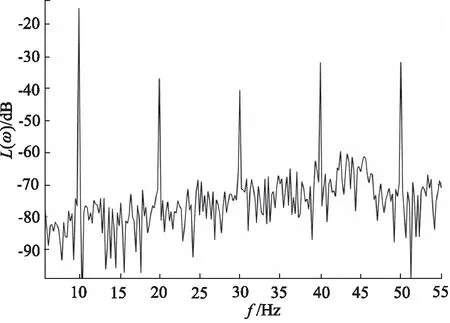
圖9 第二組實驗加速度輸出信號幅值譜
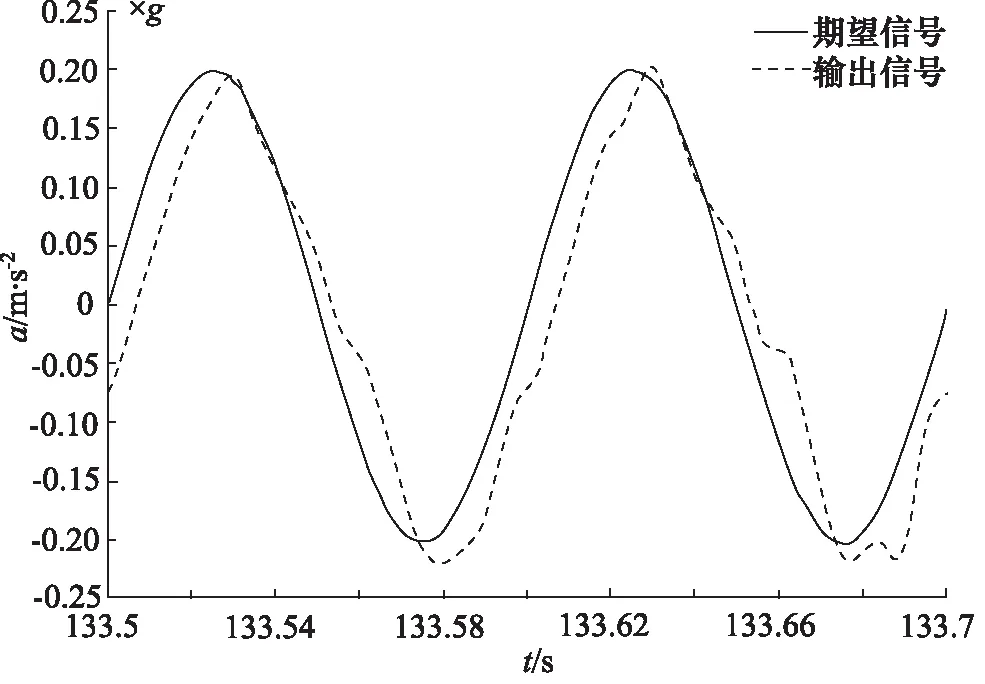
圖10 第三組實驗加速度波形跟蹤曲線
由圖10可知,輸出正弦信號峰峰值為0.409g,10 Hz 處的幅頻特性為0.20 dB,波形跟蹤精度較高。
由圖11可知,第三組實驗加速度輸出信號中4次和5次諧波基本完全消除,實現(xiàn)了雙次諧波抑制。該組實驗中加速度輸出信號的THD值為11.79%,加速度輸出信號波形失真度明顯減小。
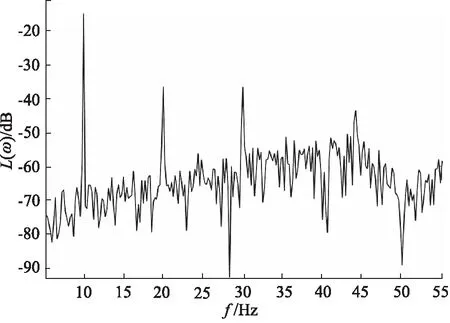
圖11 第三組實驗加速度輸出信號幅值譜
5 結(jié)論
為了提高正弦振動的控制精度,提出了自適應(yīng)逆控制及諧波抑制復(fù)合控制策略。基于帶遺忘因子的RLS算法構(gòu)建自適應(yīng)逆控制器, 將10 Hz處的幅頻特性由-3.58 dB提高至0.20 dB,明顯提升了波形跟蹤精度;基于快速塊LMS算法構(gòu)建雙次自適應(yīng)諧波抑制控制器,THD值由18.37%降低至11.79%,有效的抑制了雙次諧波。實驗研究表明,本研究提出的復(fù)合控制策略能夠明顯提高正弦振動實驗的控制精度。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
