基于傳感器采集信息的船舶發動機狀態智能檢測
2022-10-19 10:43:14沈大偉
艦船科學技術 2022年17期
沈大偉
(中北大學 省部共建動態測試技術國家重點實驗室,山西 太原 030051)
0 引 言
發動機是船舶核心部件,船舶航行過程中的動力性、可靠性以及經濟性均與其發動機相關。發動機的狀態可決定船舶是否可以正常航行,因此對船舶發動機狀態進行智能檢測意義重大。目前有很多學者研究船舶發動機狀態檢測方法,胡廷智等提出激光自準直的發動機在線檢測方法,該方法以激光自準直技術為基礎,設計船舶發動機的定子軸孔的同軸度檢測裝置,并利用該裝置實現船舶發動機的狀態智能檢測。但該方法僅從發動機定子軸孔入手,其狀態智能檢測范圍較為狹窄,適用面較小。黃功等提出了渦軸發動機故障檢測方法,該方法通過采集渦軸發動機震動信號后,將其輸入到局部密度支持向量機內,通過該支持向量機迭代得到發動機狀態檢測結果。但該方法在應用過程中,受發動機樣本數據距離影響,其歸一化效果不佳,導致其檢測結果不夠準確。傳感器信息采集方式是目前應用較為廣泛的數據采集途徑,該信息采集方式獲得的目標數據較為準確,且傳感器在傳輸數據過程中可有效保障數據不存在丟失情況,采集效果較好。面對當前發動機狀態檢測中存在的問題,本文以傳感器信息采集方式為基礎,提出基于傳感器采集信息的船舶發動機狀態智能檢測方法,以提升船舶發動機狀態智能檢測技術水平。
1 船舶發動機狀態智能檢測
1.1 基于傳感器的船舶發動機信息采集
由于發動機結構復雜,無法用一種傳感器采集其不同運行狀態信息,在此使用轉速傳感器、壓力傳感器、溫度傳感器等實現船舶發動機運行狀態信息。其技術路線如圖1 所示。
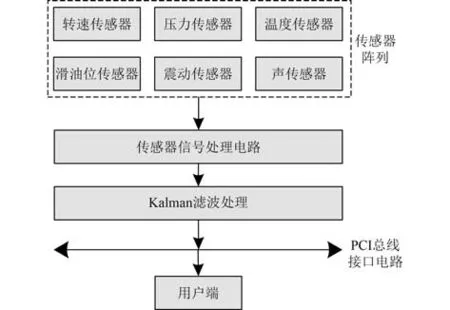
圖1 傳感器采集船舶發動機信息技術路線示意圖Fig.1 Schematic diagram of information technology route of ship engine collected by sensors
在利用傳感器采集船舶發動機信息時,轉速傳感器、壓力傳感器、溫度傳感器、滑油位傳感器、震動傳感器和聲傳感器組成傳感器陣列。該傳感器陣列獲得船舶發動機當前的壓縮機轉速、滑油壓力、滑油溫度、滑油箱流量、發動機震動信號以及發動機聲信號等信息,并將采集到的發動機運行信息經由傳感器信號處理電路輸入到Kalam 濾波算法內,去除發動機運行信息內的干擾噪聲后,PCI 總線接口電路將無干擾噪聲的發動機運行狀態信息發送到客戶端內備用。
1.2 基于主元分析的船舶發動機狀態特征提取
以無干擾噪聲的發動機運行狀態信息為基礎,使用基于核函數的主元分析方法提取發動機運行狀態信息內的狀態特征,其詳細過程如下:
令σ:β→σ表示核函數主元分析的非線性映射函數,發動機運行狀態信息的輸入空間由X表示,其中=1,2,···,表示發動機運行狀態信息總數。利用非線性映射函數將發動機運行狀態信息由其輸入空間映射到特征空間內,該特征空間由 σ:(X)表示,在特征空間內進行主元分析。
去除特征空間 σ:(X)內的均值,其表達公式如下:
依據式(1)結果計算特征空間內的協方差矩陣,其表達公式如下:

式中,x表示第個發動機運行狀態信息。
以式(5)結果為基礎,得到發動機運行狀態信息特征方程如下:

式中:λ表示發動機運行狀態信息特征值;表示特征向量,二者滿足關系 λ>0,且∈β,≠0。
對船舶發動機運行狀態信息和式(3)結果進行內積處理,其表達公式如下:

特征向量計算公式如下:
式中,α表示相關系數數值。
對式(3)~式(5)進行合并處理,則有:
式中:x表示輸入空間內的發動機運行狀態信息;x表示第個發動機運行狀態信息。
令表示×維的矩陣,則發動機運行狀態信息和在該矩陣內表達公式如下:

將式(7)結果代入到式(6)內,并對其進行簡化處理,則簡化后的表達公式如下:

計算式(8)解,其表達公式如下:

對矩陣進行對角化處理,同時使用表示λ<λ<···<λ對角化后的船舶發動機運行狀態信息對角矩陣的特征值,使用<<···<u表示特征值對應的特征向量。第一個不為0 的特征值由 λ表示,對特征向量進行歸一化處理后得到其標準化結果,其表達公式如下:

將式(6)結果代入到式(10)內,則有:
式中,u表示標準化后的第個特征向量。
計算船舶發動機運行狀態信息映射后特征向量R的投影,其表達公式如下:

利用式(11)即可得到船舶發動機運行狀態信息映射后特征向量V的投影,該投影即為船舶發動機運行狀態特征。
1.3 基于最小二乘支持向量機的船舶發動機狀態智能檢測方法
利用獲得的船舶發動機運行狀態特征建立數據集,使用最小二乘支持向量機實現發動機狀態智能檢測。依據最小二乘支持向量機理論,其將具備非線性可分特征的船舶發動機狀態特征信息映射到高維空間內,并在該空間構建最優超平面。因此使用最小二乘支持向量機檢測發動機狀態的過程為求解等式約束優化問題。其詳細過程如下:構建檢測船舶發動機狀態的優化目標函數,其表達公式為:
式中:ζ表示經驗誤差變量;表示懲罰因子;表示高維空間最優超平面。
設置式(13)約束條件為:

式中:y(·)表示最小二乘支持向量機輸出函數;表示偏置數值;φ (·)表示映射函數。
利用式(13)和式(14)結果,建立拉格朗日函數,其表達公式為:
式中,φ表示拉格朗日乘子。
設置式(14)約束條件如下:
依據式(16)約束條件,則優化求解的線性表達公式為:
利用式(17)可計算拉格朗日乘子和偏置數值,然后依據二者建立最小二乘支持向量機檢測輸出函數,其表達公式如下:
式中,(x,)表示核函數。
利用式(16) 即可輸出船舶發動機狀態檢測數值,其區間為[1,18]。數字1-8,分別對應發動機不平衡、不對中、溫度過高、油箱流量異常、轉速驟變、震動故障、聲響異常、油壓異常。
2 實驗結果與分析
以某大型貨輪為實驗對象,使用本文方法對該貨輪發動機狀態進行智能檢測,該發動機具備5 缸2 個沖程,轉速最高為11 800 r/min,功率為2.36 萬千瓦左右。
2.1 傳感器信息采集測試
驗證本文方法使用傳感器采集船舶發動機信息能力。使用本文方法采集該船舶發動機運行時的震動狀態數據,并分別選取最大數值和最小數值與其實際數值做對比分析,結果如圖2 所示。
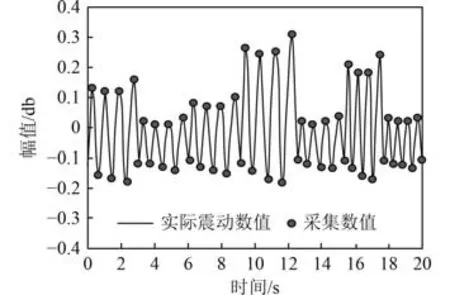
圖2 發動機運行狀態信息采集測試結果Fig.2 Test results of marine engine operation status information collection
分析圖2 可知,該發動機的震動信息呈現有規律波動趨勢,而本文方法采集其震動信息時的最大數值與最小數值均與其實際震動信息數值最大與最小完全吻合。說明本文方法采集船舶發動機運行狀態信息能力較強,也從側面說明本文方法對發動機運行狀態檢測能力較強。
2.2 狀態信息特征提取測試
以一組發動機聲信號作為實驗對象,使用本文方法提取該聲信號的子帶頻譜特征和譜能量特征,結果如圖3 所示。分析圖3 可知,該發動機聲信號的子帶能量特征呈現較大幅度波動趨勢,說明此時發動機震動所發出的聲音時大時小,發動機聲音不規律,存在故障風險。而本文方法提取的發動機聲信號的子帶能量特征和譜能量特征曲線重合度較高,說明本文方法提取發動機聲信號特征較為精準。
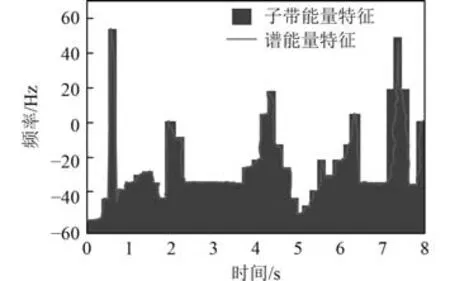
圖3 發動機聲信號特征提取結果Fig.3 Feature extraction results of ship engine acoustic signal
2.3 船舶發動機狀態智能檢測測試
以特征空間投影形式呈現本文方法檢測船舶發動機狀態能力。以滑油流量異常信息、滑油壓力異常信息、壓縮機轉速異常信息和發動機正常運行信息為實驗對象,使用本文方法將其映射到高維空間內,分析不同發動機運行狀態信息的投影,結果如圖4 所示。分析圖4 可知,使用本文方法將滑油流量異常信息、滑油壓力異常信息、壓縮機轉速異常信息和發動機正常運行信息映射到高維空間后,同類型的發動機狀態信息分布較為集中,但不同類型的狀態信息之間分布較為稀疏,尤其是正常狀態信息與滑油流量異常信息、滑油壓力異常信息、壓縮機轉速異常信息在高維空間分布較遠。該現象說明:本文方法可有效檢測船舶發動機在不同狀態時的情況,具備較好的船舶發動機狀態智能檢測能力。
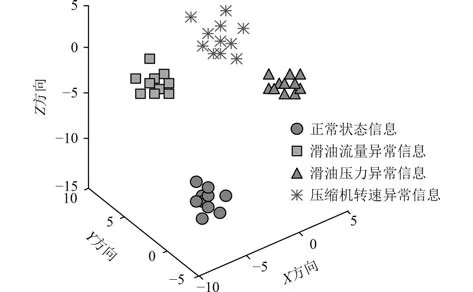
圖4 船舶發動機狀態智能檢測測試結果Fig.4 Intelligent detection test results of ship engine status
3 結 語
本文研究基于傳感器采集信息的船舶發動機狀態智能檢測方法,并以實際船舶發動機為實驗對象對本文方法進行驗證。驗證結果說明:本文方法具備較精準的船舶發動機信息采集能力、特征提取能力以及不同類型故障檢測能力,當船舶發動機出現故障時,可有效對其進行智能檢測,具備較好的應用效果。
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
當代陜西(2019年10期)2019-06-03 10:12:04
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
汽車與新動力(2015年1期)2015-02-27 12:11:01
河南科技(2014年23期)2014-02-27 14:19:15
汽車與新動力(2013年5期)2013-03-11 16:08:17