基于信號補償下垂控制的微電網動態性能分析
2022-10-25 00:46:58李浩琛郭志堅
電氣技術 2022年10期
關鍵詞:系統
李浩琛 郭志堅
基于信號補償下垂控制的微電網動態性能分析
李浩琛 郭志堅
(山西工程技術學院電氣工程與自動化系,山西 陽泉 045000)
傳統下垂控制在微電網逆變器并聯運行中呈現出無功功率無法均分和電能質量下降的問題。針對這一問題,設計一種基于信號補償的下垂控制方式。該控制方式是在傳統下垂控制中分別添加無功均分差值信號及電壓和頻率補償信號,以此來實現無功功率的均分和電能質量的恢復;通過線性化分析對該控制方式進行小信號建模,分析各參數對系統動態性能的影響。最后對逆變器并聯模型進行仿真研究,結果表明該控制方式可以在實現功率均分的同時兼顧電能質量且具有良好的冗余性。
微電網逆變器;信號補償;小信號模型;動態性能
0 引言
微電網作為對清潔能源的一種有效利用形式,近年來得到廣泛研究,我國相繼在各大高校和部分區域設立了微電網研究平臺和小型的微電網供電系統[1-2]。考慮到微源種類多種多樣,以及各微源大都通過逆變器與交流母線和電網相連,因此在微電網結構中會存在大量并聯的逆變設備,而這些并聯設備的工作情況成為微電網安全運行的關鍵所在[3-4]。
微電網的運行方式可以分為三種:孤島、并網、孤島和并網之間的切換。其中,孤島運行是基礎,它直接決定著電能的質量,從而影響其余兩種方式的運行效果,因此研究孤島模式下的運行情況具有重要意義。
下垂控制屬于無互連線控制,它的使用可以減少逆變器之間通信線路的數量,簡化硬件的連接方式,并且在不影響整體運行的情況下實現逆變器的“熱插拔”,以此實現供電容量的靈活變換,因此得到了廣泛應用[5]。
然而,該控制方式也存在相應的缺點。首先,微電網在孤島模式下,由于各臺逆變器與交流母線之間線路阻抗的分布不同導致并聯系統運行時無功功率無法有效均分,從而產生環流,影響各臺逆變器的穩定運行[6-7]。文獻[8]提出一種新型自適應虛擬阻抗,通過加入這種虛擬阻抗來實現不同容量逆變器之間的功率均分,抑制環流。文獻[9]針對含有同步發電機的微電網,提出一種形式上更接近傳統虛擬阻抗的自適應虛擬阻抗,不僅實現功率均分,而且為微電網后續控制打下基礎。這些自適應控制的使用可以智能調節阻抗系數,從而應對外部環境的改變,增強系統的魯棒性,但是添加虛擬阻抗的本質是減小線路阻抗不同帶來的負面影響,所謂的自適應是在傳統虛擬阻抗基礎上疊加自適應項構成的,這種構成方式不僅結構復雜而且會增加虛擬阻抗的電壓降,給后續補償帶來困難。文獻[10]提出一種基于改變下垂系數的自適應控制,同樣可以實現功率均分,但是該方法人為地將頻率與無功組合、電壓與有功組合,違背了電力系統調頻和調壓的習慣。
其次,下垂控制是模擬同步發電機調頻調壓特性得到的,它會導致頻率和電壓下降,甚至會導致電能質量嚴重降低,對微電網后續運行造成不利影響[11]。文獻[12]基于主從控制架構,孤島運行時主機采用VF下垂控制,從機采用PQ控制,由主機擔負穩定電壓和頻率的任務。文獻[13]采用類似方案,基于實驗平臺驗證了在該架構下由主機擔負整個系統電壓和頻率穩定性的可行性。但是這種主從架構會在主機與從機之間引入通信線路,考慮到微電網中能量管理系統與各微源之間信號的交換,該通信線的引入會帶來極大的不便。文獻[14]采用改進的虛擬同步發電機技術,該方式可使逆變器輸出端口具有類似同步發電機的特性,從根本上解決了電能質量下降的問題,但是這種方式無法解決逆變器并聯時的功率均分問題,因此該控制方式在微電網中不能單獨使用。
本文設計一種基于信號補償的下垂控制方式。首先,在傳統下垂控制的無功環節增加均流補償信號,使其實現對無功功率的有效均分,抑制環流;其次,在有功環節和無功環節分別增加相位補償和電壓補償,使孤島模式下并聯系統的供電質量達到并網要求;最后,分析該控制方式的穩定性,并且通過仿真研究對其進行驗證。
1 基于信號補償的下垂控制策略
1.1 傳統下垂控制分析
以兩臺逆變器并聯模型為例來分析傳統下垂控制的原理和缺點。逆變器并聯簡易模型如圖1所示,其中,0°為交流母線電壓,1、2分別為逆變器輸出的電壓幅值,它們與交流母線的電壓相位差分別為1、2,1、2分別為兩臺逆變器等效輸出阻抗電阻分量與線路阻抗中電阻分量的總和,1、2為與之對應的電感分量的總和,L、L為公共母線所連接的公共負荷,1、1、2、2分別為兩臺逆變器注入交流母線的有功功率和無功功率。
以逆變器1為例說明并聯系統的功率傳輸特性。逆變器并聯系統在穩定運行時,1很小,可以近似認為cos1≈1、sin1≈1,則由并聯模型可得出逆變器注入母線的功率表達式為
式中,1為考慮線路阻抗的等效輸出阻抗角。
考慮到三相逆變器濾波電感的影響,若將等效輸出阻抗視為純感性,則式(1)和式(2)可進一步轉化為
對式(3)和式(4)進行線性化處理有
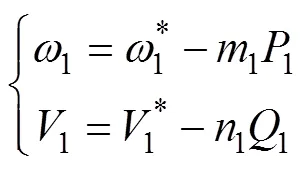
通過式(5)和式(6)可知,可以通過控制相角1和電壓1來達到對有功功率和無功功率的控制,模擬電力系統中對頻率和電壓的調整方式,由此可以得出傳統下垂控制如式(7)所示。

穩定運行時,1≈,則由式(3)、式(4)和式(7)可以得出功率控制框圖如圖2所示,其中LPF為低通濾波器,0為逆變器空載角頻率。
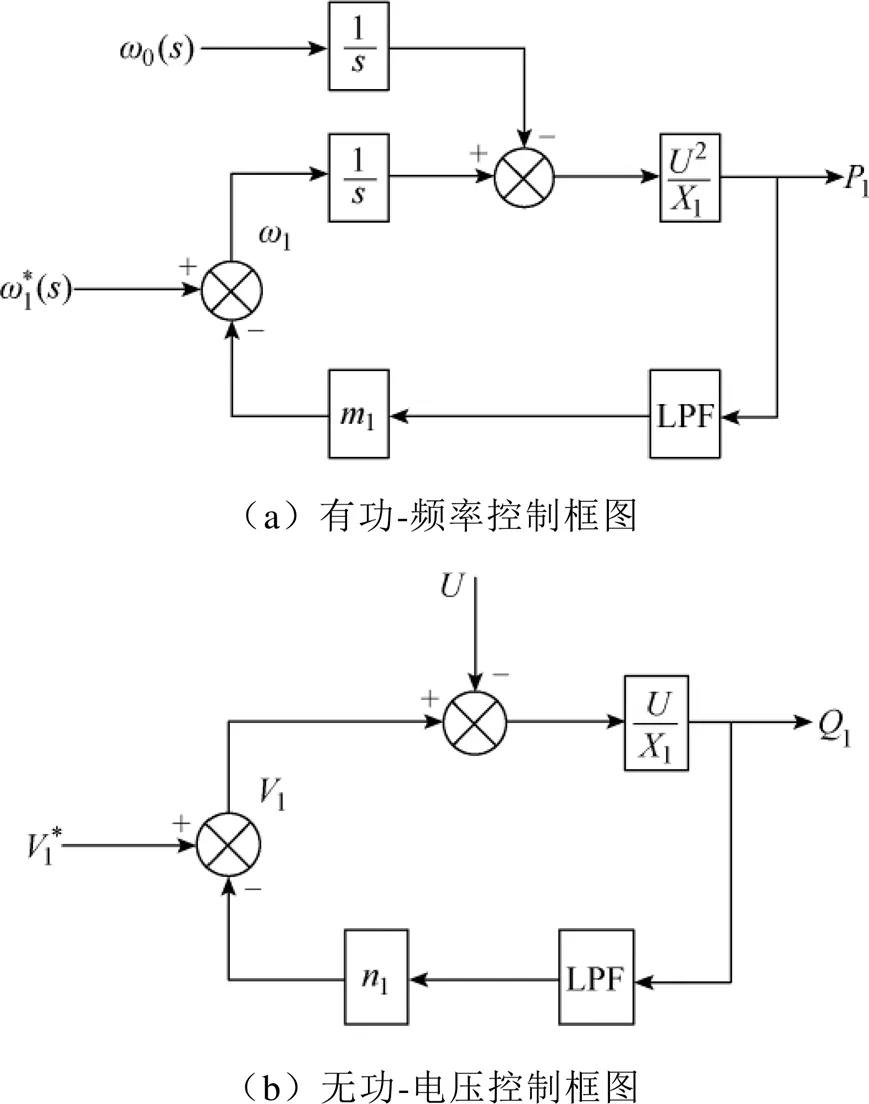
圖2 功率控制框圖
由圖2可以得出,有功功率和無功功率傳遞方程的時域表達式為
通過式(8)和式(9)可以看出,穩定狀態下,有功功率的輸出與等效輸出阻抗沒有關系,這表明并聯系統中的各臺逆變器可以通過頻率的調整實現有功功率的均分,與之相反,無功功率的輸出受線路阻抗的影響,單純調整電壓無法實現無功功率的均分。
1.2 無功均流信號補償
并聯系統實現無功功率的均分,需滿足式(10)所示的功率均分條件,其中表示第臺逆變器。

由式(10)可知,若無功功率無法均分,說明各臺逆變器之間無功調整系數和無功功率的乘積不一致,因此可以設計相應補償量,即
式中:為并聯逆變器的總個數;v為均流系數;Q、Q分別為第、臺逆變器輸出的無功功率;n、n分別為對應的無功功率調整系數。

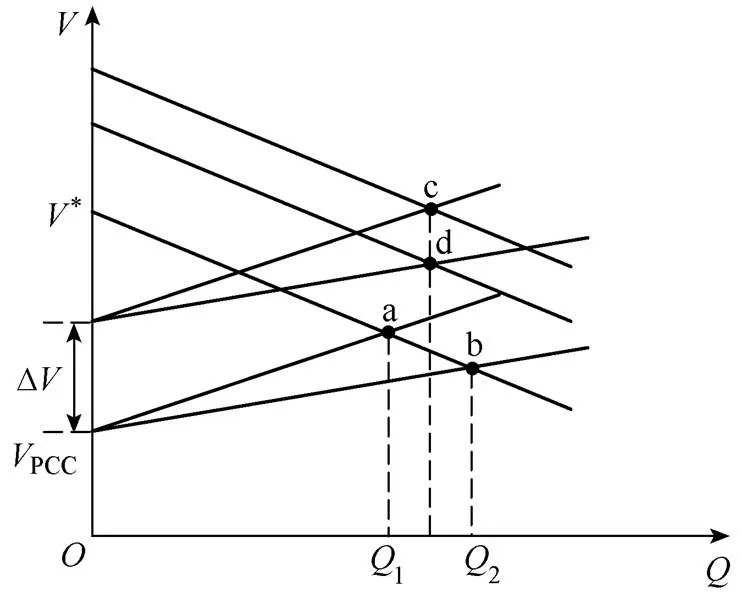
圖3 無功功率均分示意圖
1.3 頻率和電壓信號補償
由式(7)可以看出,最終輸出的角頻率和電壓幅值與標準值相比都將出現不同程度的跌落。為了保證供電質量,需要對傳統下垂控制進行相應的 補償。
頻率和電壓補償原理如圖4所示,其中αβ為靜止坐標軸,g為電網電壓旋轉角速度,g為電網電壓,以電網電壓為d軸,建立旋轉坐標系。為電網電壓超前于輸出電壓的相角,為逆變器輸出電壓,為逆變器輸出電壓的旋轉角速度,將輸出電壓矢量沿d、q軸分解得到d、q,調整輸出電壓矢量的角速度,使逐漸減小直至為零,即可實現對相位和電壓的補償,其數學表達式如式(12)所示。
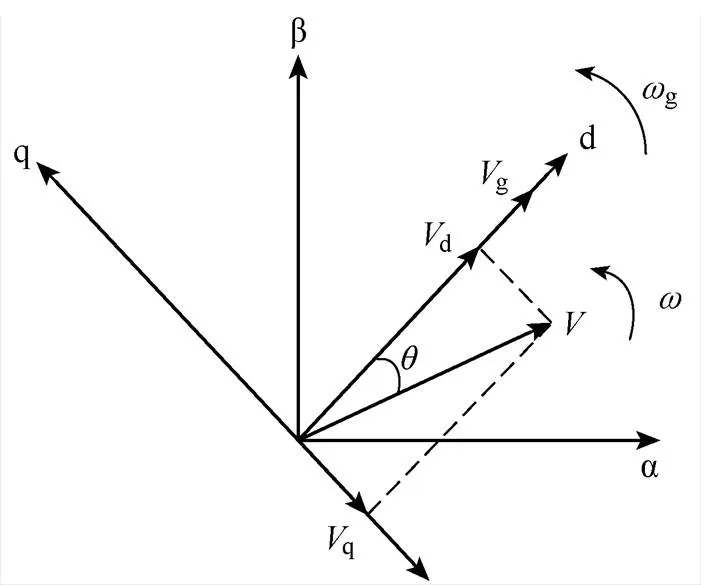
圖4 頻率和電壓補償原理
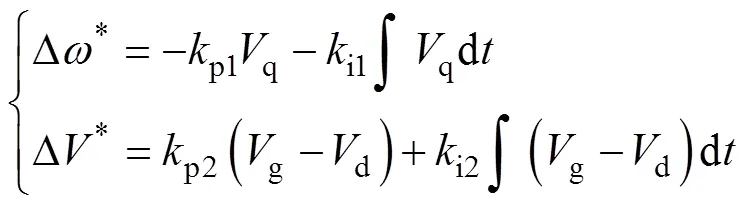
式中:p1、i1、p2、i2分別為負責頻率和電壓調整的兩個PI調節器的比例參數和積分參數;DwDV分別為逆變器輸出電壓與電網電壓之間的角頻率和電壓幅值的補償量。
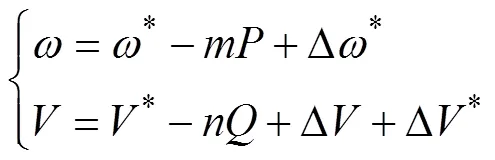
綜上所述,經過改進之后的下垂控制表達式為
2 并聯系統穩定性分析
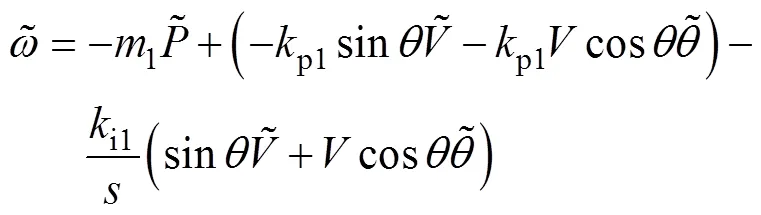
由式(13)可知,該方程參數的選取會對系統的穩定性造成直接影響,因此需對該控制方式進行小信號分析[15-16]。
以兩臺逆變器并聯為例,對式(13)進行線性化處理,如式(14)和式(15)所示。

式(17)中分別如式(18)所示,其中為線路阻抗角,為考慮線路阻抗的等效輸出阻抗。
綜合式(14)~式(18)可得最終的特征方程,即

式中,為相應的多項式表達式。
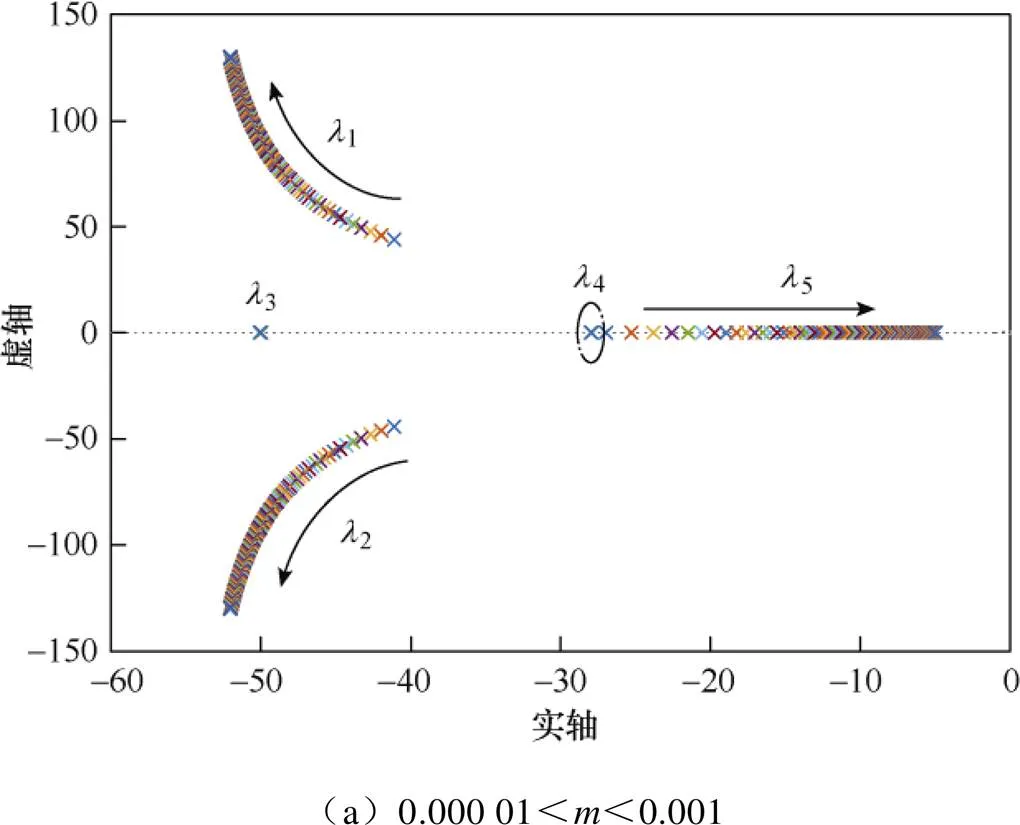
圖5為有功環節各系數變化對穩定性的影響,其中1、2、3、4、5為求解式(19)得到的五個根。圖5(a)中隨著下垂系數取值的增大,1、2逐步遠離虛軸,3、4基本保持不變,而5逐步向虛軸靠近,5的移動方式將會對穩定性造成影響。圖5(b)中隨著補償信號比例系數p1取值的增大,1、5均會向虛軸靠攏,對穩定性造成不利影響。圖5(c)中隨著補償信號積分系數i1的增大,5逐漸遠離虛軸,其他根的變化對穩定性沒有影響。
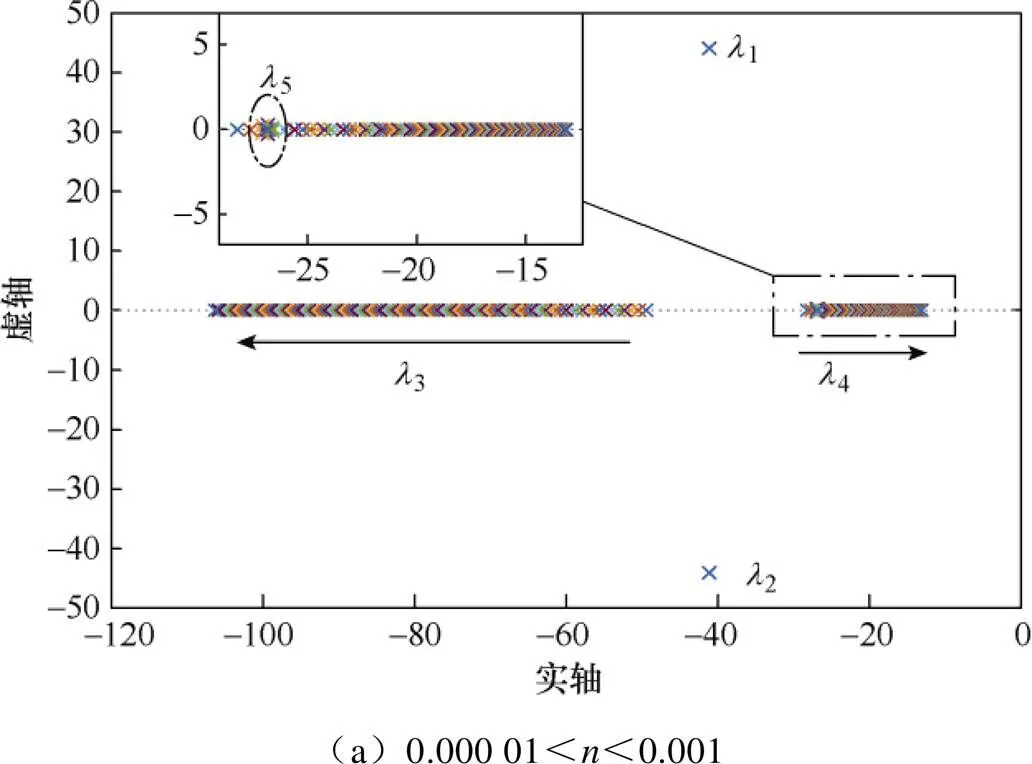
無功環節的根軌跡分布情況如圖6所示。圖6(a)中隨著下垂系數增大,1、2、5基本保持不變,3向遠離虛軸方向運動,4會向虛軸方向靠攏,會影響系統的穩定性。圖6(b)中隨著均流系數v取值的增大,5會向遠離虛軸方向移動,3會向虛軸方向移動,但是在移動至一定位置后基本不變。圖6(c)中隨著補償信號比例系數p2變化,3、4均會向虛軸移動,其中4會無限趨近于虛軸,影響系統穩定性。圖6(d)中隨著補償信號積分系數i2的變化,3、5會向遠離虛軸方向移動,其中5在i2取值較小時會直接進入復平面右側,使系統進入不穩定狀態。
3 系統仿真分析
為驗證所設計算法的有效性,在Matlab/Simulink中搭建兩臺不同容量逆變器并聯模型,以此模擬并聯工作狀態。仿真參數見表1,兩臺逆變器均采用空間矢量脈寬調制(SVPWM)方式。
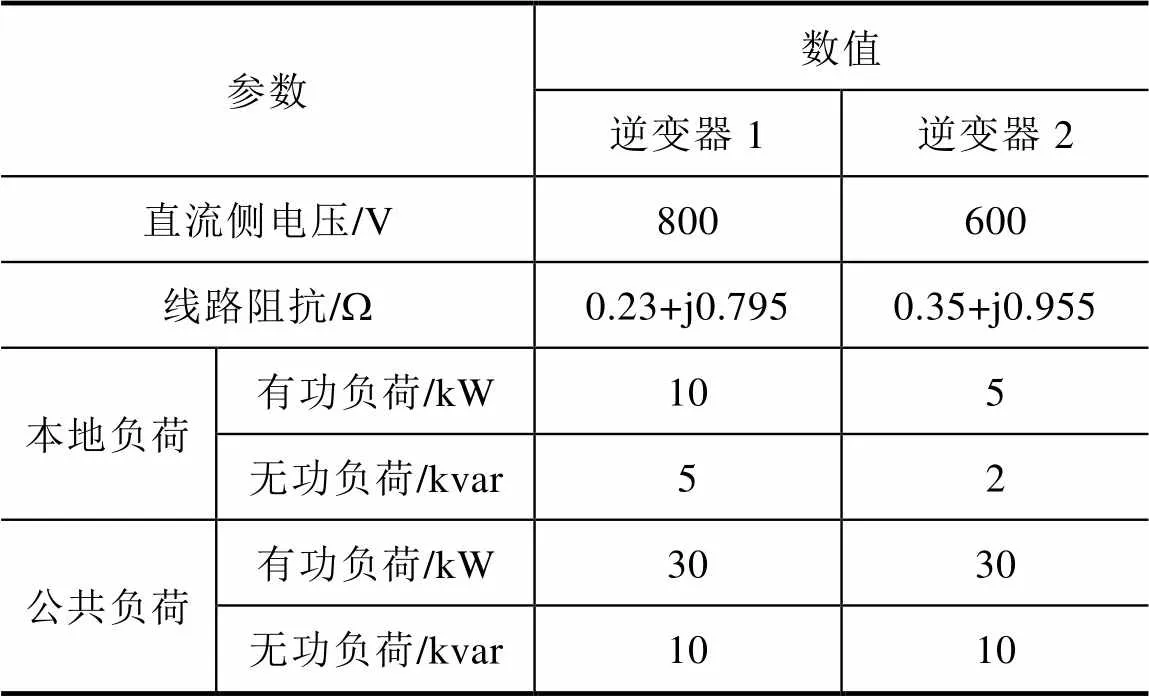
表1 逆變器并聯系統仿真參數
為證明所設計下垂控制的優越性,在上述參數構成的系統下,進行與傳統下垂控制的仿真對比,改進下垂控制參數見表2。
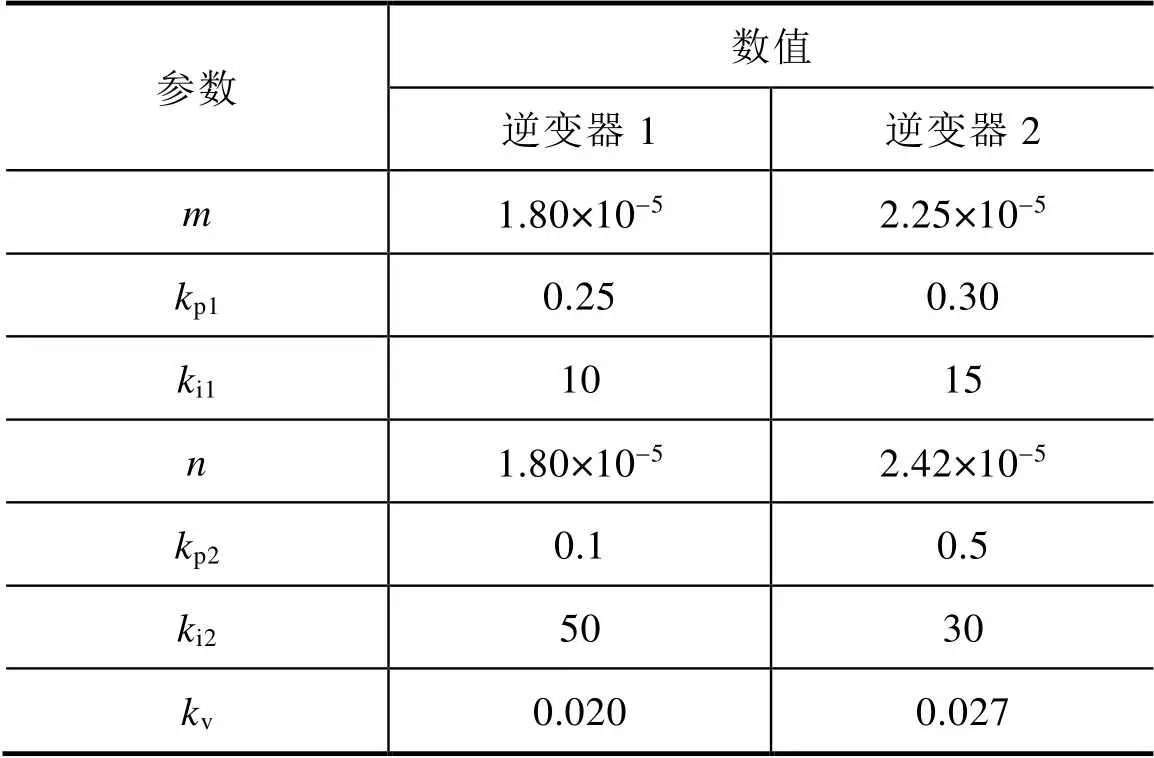
表2 改進下垂控制參數
3.1 兩種下垂控制仿真對比
圖7為兩種控制方式對環流的抑制效果,以逆變器A相為例,在兩種下垂控制的作用下都表現出不同程度的均流效果,受線路阻抗的影響,傳統下垂控制無法對無功功率所引起的環流進行有效抑制,而改進之后的控制方式可以實現對環流的削減,0.4s之后環流趨近于0,實現了對并聯系統環流的有效抑制。
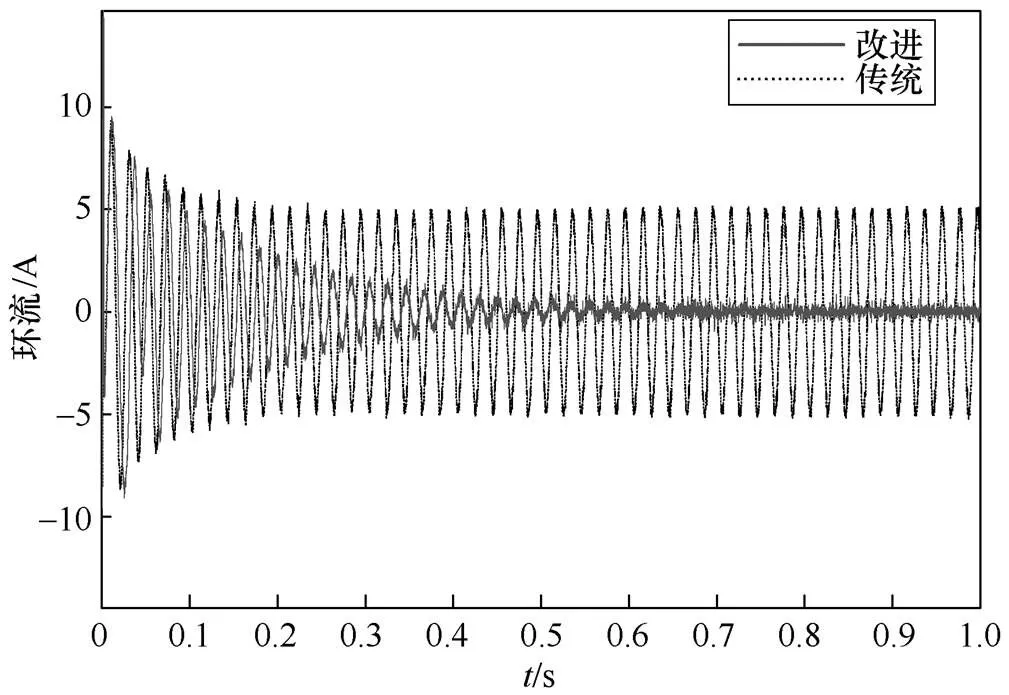
圖7 兩種控制方式對環流的抑制效果
圖8為兩種控制方式對并聯系統頻率的影響。初始階段受相應控制方式對并聯系統的作用會呈現短暫的波動,之后趨于穩定。傳統下垂控制以損失頻率來實現各逆變器之間有功功率的均分,頻率衰減至約49.3Hz;而改進的下垂控制通過頻率補償,在保證有功功率均分的情況下,始終保證頻率穩定在50Hz。
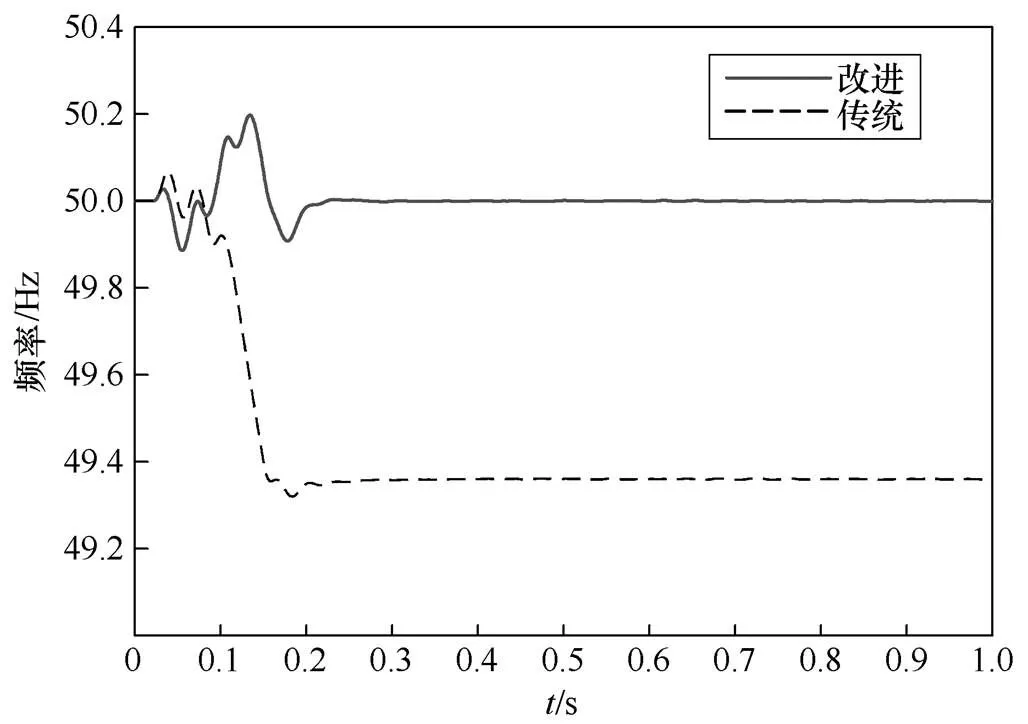
圖8 兩種控制方式對并聯系統頻率的影響
圖9為兩種控制方式對輸出電壓相位的影響。傳統方式對輸出電壓的相位沒有控制作用,而改進后可以實現頻率補償,在0.08s時輸出電壓的相位與電網電壓保持一致,為之后的并網控制打下基礎。
圖10為兩種控制方式對最終輸出電壓的影響。傳統下垂控制中的無功環節導致電壓衰落至276V,低于規定的電壓誤差范圍。在電壓幅值補償環節的影響下,改進的下垂控制使電壓可以迅速回升至308V。
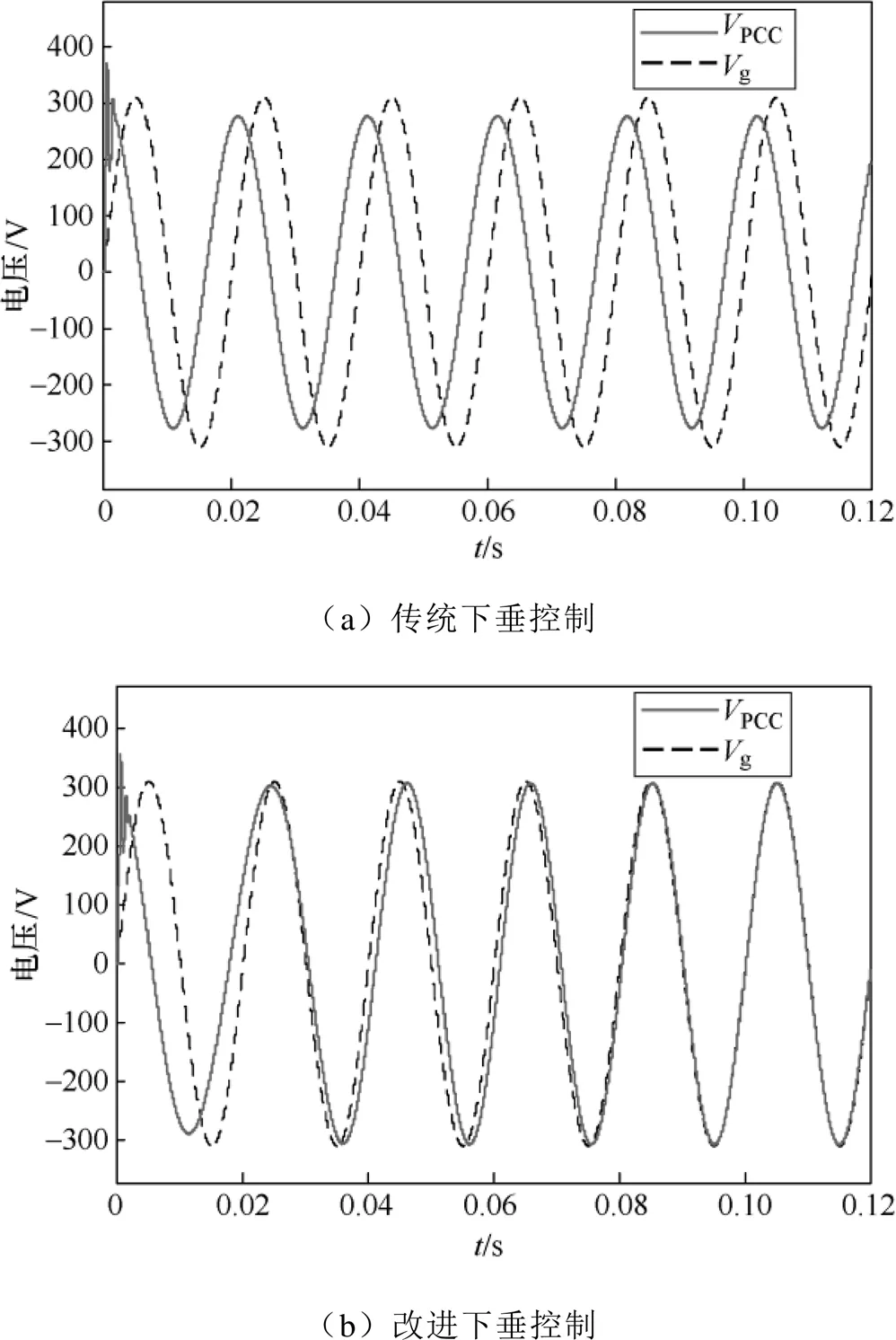
圖9 兩種控制方式對輸出電壓相位的影響
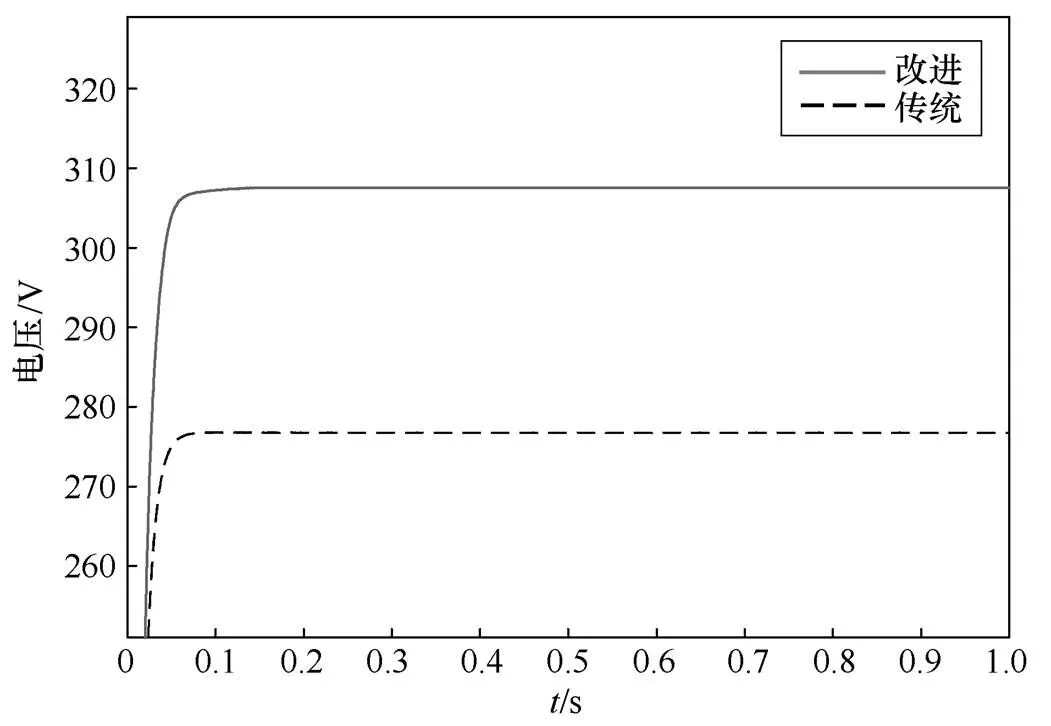
圖10 兩種控制方式對最終輸出電壓的影響
3.2 改進下垂控制冗余性驗證
下垂控制的另一個特點是可以通過增減并聯系統中的逆變器來實現對系統容量的調整,因此需要驗證其冗余性。
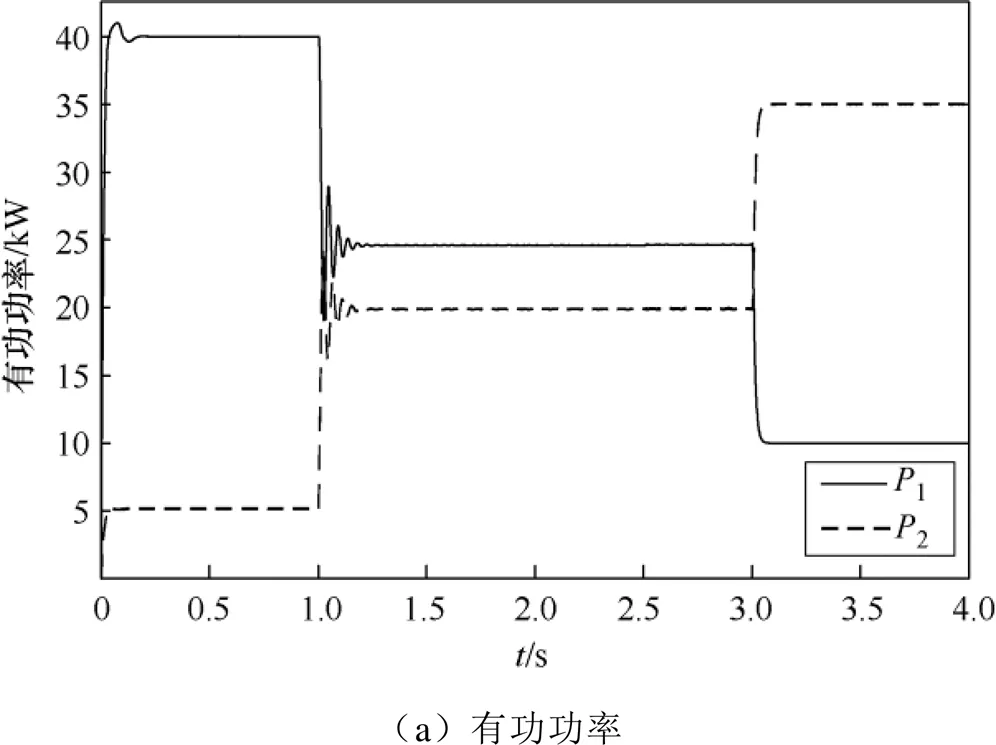
圖11(a)為容量變化時的有功功率變化情況。初始時刻由逆變器1負責對本地負荷和公共負荷供電,在1s時,逆變器2開始并聯運行,兩臺逆變器同時分擔公共負荷,它們的有功功率分別變為25kW、20kW,滿足功率均分條件11=22,在3s時,逆變器1退出并聯系統,公共負荷的供電由逆變器2負責,功率增加至35kW。
圖11(b)為容量變化時的無功功率變化情況。逆變器1在初始時刻承擔本地負荷和公共負荷的供電,總計為15kvar,在1s時逆變器2參與供電,此時兩臺逆變器在均流信號的作用下出現無功功率變化,兩臺逆變器最終分別承擔9.75kvar和7.25kvar的無功負荷,這樣可以滿足無功功率的均分條件11=22,3s時逆變器1退出系統,公共負荷由逆變器2單獨承擔。
4 結論
環流普遍存在于逆變器并聯系統中,它會嚴重影響并聯系統的穩定運行,傳統下垂控制對其抑制能力有限,并且導致電壓和頻率的跌落,嚴重影響微電網孤島情況下的供電質量。鑒于此,本文對傳統下垂控制進行了改進,使其更好地適用于微電網環境下的逆變器并聯系統,通過分析得到以下結論:
1)改進后的下垂控制可以在保證輸出電能質量的同時有效抑制環流,并且可以使輸出電壓相位與電網相位保持一致。
2)采用改進后的下垂控制可以在一定程度上滿足微電網供電時對容量的靈活調整,逆變器可以實現即插即用的效果。
[1] 張丹, 王杰. 國內微電網項目建設及發展趨勢研究[J]. 電網技術, 2016, 40(2): 451-458.
[2] 馬藝瑋, 楊蘋, 王月武, 等. 微電網典型特征及關鍵技術[J]. 電力系統自動化, 2015, 39(8): 168-175.
[3] 鄭峰, 葉韜, 李世春, 等. 基于儲能廣義控制算法的微網并/離網平滑切換控制策略研究[J]. 中國電機工程學報, 2019, 39(10): 2840-2852.
[4] 張繼紅, 楊建民. 孤島微網并聯逆變器環流抑制與母線電壓控制[J]. 電測與儀表, 2021, 58(2): 125-132.
[5] 劉丹妮, 馬猛飛. 基于下垂控制的微電網并網轉孤網的研究[J]. 電氣技術, 2021, 22(2): 21-25.
[6] 錢峰, 皮杰, 劉俊磊, 等. 微電網建模與控制理論綜述[J]. 武漢大學學報(工學版), 2020, 53(12): 1044- 1054.
[7] HOU Xiaochao, SUN Yao, LU Jinghang, et al. Dis- tributed hierarchical control of AC microgrid operating in grid-connected, islanded and their transition modes[J]. IEEE Access, 2018, 6: 77388-77401.
[8] 陳樹泉, 張兆云, 李天利. 基于模糊下垂控制的直流微電網電壓穩定控制研究[J]. 電氣技術, 2020, 21(8): 40-45.
[9] 代維, 秦文萍, 任春光, 等. 含同步機微網中基于解耦下垂的自適應虛擬阻抗控制[J]. 中國電機工程學報, 2020, 40(14): 4486-4495, 4728.
[10] 劉彥呈, 莊緒州, 張勤進, 等. 基于虛擬頻率的直流微電網下垂控制策略[J]. 電工技術學報, 2021, 36(8): 1693-1702.
[11] GUERRERO J M, VASQURZ J C, MATAS J, et al. Hierarchical control of droop-controlled AC and DC microgrids-a general approach toward standardi- zation[J]. IEEE Transactions on Industrial Electronics, 2011, 58(1): 158-172.
[12] 郭立東, 雷鳴宇, 楊子龍, 等. 光儲微網系統多目標協調控制策略[J].電工技術學報, 2021, 36(19): 4121-4131.
[13] 張雪松, 趙波, 李鵬, 等. 基于多層控制的微電網運行模式無縫切換策略[J]. 電力系統自動化, 2015, 39(9): 179-184, 199.
[14] 魏亞龍, 張輝, 孫凱, 等. 基于虛擬功率的虛擬同步發電機預同步方法[J]. 電力系統自動化, 2016, 40(12): 124-129, 178.
[15] DOU Chunxia, ZHANG Zhanqiang, YUE Dong, et al. Improved droop control based on virtual impedance and virtual power source in low-voltage microgrid[J]. IET Generation, Transmission & Distribution, 2017, 11(4): 1046-1054.
[16] VASQUEZ J C, GUERRERO J M, SAVAGHEB M, et al. Modeling, analysis, and design of stationary- reference-frame droop-controlled parallel three-phase voltage source inverters[J]. IEEE Transactions on Industrial Electronics, 2013, 60(4): 1271-1280.
Analysis of microgrid dynamic performance based on droop control algorithm with signal compensation
LI Haochen GUO Zhijian
(Electrical Engineering and Automation Department, Shanxi Institute of Technology, Yangquan, Shanxi 045000)
In the parallel operation of microgrid inverters, traditional droop control presents the problems of non-equal distribution of reactive power and degradation of power quality. In terms of the issues, a droop control with signal compensation is designed. In order to achieve reactive power sharing and power quality recovery, the reactive power sharing difference signals and voltage and frequency compensation signals are added to traditional droop control respectively. For the aim of analyzing dynamic performance, the small signal model is carried out by linearization. Finally, the parallel model of inverters is simulated and verified. The result shows that the algorithm can realize power sharing while taking into account power quality, and has good performance in redundancy.
microgrid inverters; signal compensation; small signal model; dynamic performance
山西省高等學校科技創新項目(2020L0725)
2022-04-13
2022-05-19
李浩琛(1987—),男,山西長治人,碩士,助教,主要從事微電網運行控制研究。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
