LiDAR傳感器及技術在農業場景的應用進展綜述*
2022-10-27 07:05:26王瀟張美娜ZhouJianfeng孫傳亮吳茜曹靜
中國農機化學報 2022年11期
王瀟,張美娜, ,Zhou Jianfeng,孫傳亮,吳茜,曹靜
(1. 南京農業大學工學院,南京市,210031; 2. 江蘇省農業科學院農業信息研究所/農業數字孿生聯合實驗室、種質資源創新與信息化利用聯合實驗室,南京市,210014; 3. 美國密蘇里大學,密蘇里州哥倫比亞市,MO 65211)
0 引言
據聯合國經濟和社會事務部2019年發布的一份報告稱,到2030年,世界人口預計將達到85億,2050年達97億,糧食安全問題持續倒逼農業生產方式向現代化、智能化、精準精細化方向發展[1]。美國等經濟發達國家在20世紀80年代末期便提出精準農業概念,這是一種基于信息和知識管理的現代農業生產系統,可以幫助最大化利用資源,最小化損失和浪費,被認為是未來高效和可持續農業的推動者[2-3]。精準農業系統借助農業裝備與設施搭載的各類傳感器獲取農作物、田間環境等大量信息,用于分析與決策,實現定時、定位、定量控制農資投入與農作物生長,因此,傳感器及相關技術在農業生產中的應用需求日益迫切。目前,在農業場景中應用較為廣泛的傳感器包括光傳感器、立體視覺、超聲波傳感器及激光雷達掃描傳感器(LiDAR,Light Detection and Ranging)等[4-5],各類傳感器的特點不同,應用場景也不同,其中,LiDAR因其不易受光環境影響、可三維建模、分辨率高、抗干擾能力強、技術與產品成熟等特點被廣泛應用于智能農機裝備、作物表型檢測、無人機低空遙感等領域,為數字農業、精準農業、智慧農業系統的開發提供了技術支撐。
通過查閱大量文獻與分類研究,本文系統性介紹LiDAR及相關技術在農業場景中的應用進展,包括LiDAR的性能特點,工作原理與分類,市場應用與新技術;LiDAR在森林參數測量、果樹靶標幾何特征探測、作物表型幾何特征檢測、農業車輛自主導航定位以及農藥霧滴飄移檢測這5個農業場景中的具體應用;討論分析LiDAR傳感器及技術在上述5類農業場景應用中的發展趨勢;最后,總結并展望LiDAR傳感器在未來農業應用中的發展方向。
1 LiDAR技術發展
1.1 LiDAR簡介
LiDAR是激光探測及測距系統的簡稱,是激光、大氣光學、雷達、光機電一體化、電子計算機和信息處理等技術相結合的產物,它利用激光束搭載振幅、相位、頻率和偏振等信息,主要用于主動式的遙感探測。LiDAR主要利用電磁波中的近紅外、可見光及紫外等波段[6],波長可以從250 nm到11 μm,比傳統無線電雷達、微波雷達的波長高出2~4個數量級。LiDAR的特點如下:激光傳播方向性好,波束窄,抗干擾能力強;同時,LiDAR的角分辨率高、距離分辨率高、速度分辨率高、測速范圍廣,能同時捕獲探測目標物體清晰的強度圖像、距離圖像等;體積和重量都比微波雷達小,使用方便靈活[7]。LiDAR及相關技術已被廣泛應用于大氣監測、無人機遙感、道路檢測、車輛自動避障等方面[8-11],先進地圖測繪、數字孿生城市構建與自動駕駛導航已成為LiDAR未來的市場主要增長點。
1.2 LiDAR工作原理與分類
LiDAR的工作原理與雷達類似,常用的測距方法包括脈沖法和相位法兩種。(1)脈沖法[12]:LiDAR發射端發射集中了能量的激光脈沖,接收端接收到經被測物體反射回的激光后,通過脈沖計數器記錄激光發射和反射信號到達的時間,計算出激光傳輸時間,進而測得雷達與目標物間距離。脈沖法激光雷達量程長、功耗低、結構簡單,但受限于系統時鐘頻率導致測量精度不高,因而主要用于對精度要求一般的遠距離場景。(2)相位法[13]:利用固定頻率的高頻正弦信號,連續調制激光源的發光強度并測定調制激光往返一次所產生的相位延遲,間接地測定信號傳播時間,從而得到被測距離。相位法測量精度高,通常達毫米量級。
LiDAR的分類方式較多,下面簡述其中5種[12, 14]。(1)按激光波段,分為紫外激光雷達(10~400 nm)、可見激光雷達(390~780 nm)和紅外激光雷達(905~1 550 nm)。(2)根據傳輸波形和數據處理方法不同,可分為脈沖激光雷達、連續激光雷達、脈沖壓縮激光雷達、運動目標顯示激光雷達、脈沖多普勒激光雷達和成像激光雷達。(3)根據傳感器安裝平臺不同,可分為地面激光雷達、機載激光雷達、艦載激光雷達和航天激光雷達等。(4)根據使用功能不同,可分為目標識別激光雷達、流速測量激光雷達、跟蹤激光雷達、成像激光雷達。(5)根據掃描機構的不同,分為二維掃描(單線)和三維掃描激光雷達(4/8/16/32/40/64線)。
1.3 LiDAR技術發展趨勢
隨著技術的發展、制造工藝的成熟以及應用需求的提高,LiDAR開始呈現出固化、小型化和低成本的趨勢,點密度和質量不斷提高,新型LiDAR產品與技術不斷涌現,如固態激光雷達、單光子激光雷達、高密度激光雷達、全波形(FWF)激光雷達、多光譜/高光譜激光雷達等,下面進行簡要介紹。
固態激光雷達傳感器基于不含機械運動部件的硅片,目前分為MEMS(Micro-Electro-Mechanical System,微機電系統)、OPA(Optical Phased Array,光相控陣)和Flash三種。MEMS是將機械機構進行微型化、電子化的設計,掃描單元變成了MEMS微鏡;OPA技術采用多個光源組成陣列,通過控制各光源發光時間差,合成具有特定方向的主光束,控制主光束實現不同方向掃描;Flash技術是短時間直接發射出一大片覆蓋探測區域的激光,再以高度靈敏的接收器接收繪制圖像,工作模式類似相機。與傳統機械式激光雷達相比,固態激光雷達具有更小的尺寸、更低的成本、更高的空間分辨率和效率,可以集成到便攜式設備中[12]。單光子激光雷達是一種光學相機,它采集自身發出的激光到達目標后反射的光子數量信息,不依賴自然光,穿透力強,可以全天候全天時工作。中國科學技術大學潘建偉、徐飛虎教授等實現了超過200公里的遠距離單光子三維成像,首次將成像距離從十公里突破到百公里數量級,主要面向低功耗、高分辨率等實用化需求的遠距離激光雷達應用[15]。高密度激光雷達能大幅提高激光發射頻率,實現高密度采樣,獲取更加全面的數據。全波形(FWF,full-waveform)激光雷達是近年來發展迅速的激光雷達分支之一,在FWF模式下,每個激光脈沖的反向散射信號被記錄為幾百個樣本,可產生激光覆蓋區中待測目標結構的高度細節,有助于顯著提高區分不同對象的性能[5]。最早的激光雷達被設計成發射單色波長的脈沖,僅反饋強度信息[16]。為提高捕捉更詳細光譜信息的能力,雙通道激光雷達、多光譜激光雷達、高光譜激光雷達正得到越來越多的關注,它們將光譜成像技術和激光雷達測距技術相結合,能同時獲取目標物的圖像信息、光譜信息、位置信息等,實現目標物的多維數據獲取,具有測量范圍大、實時性強、適用性廣等特點[17]。
2 LiDAR在農業場景中的應用
目前,LiDAR在森林參數測量、果樹靶標幾何特征探測、作物幾何表型特征檢測、農業車輛自主導航定位以及農藥霧滴飄移檢測等5個農業場景中應用已較為廣泛,下面進行簡要闡述。
2.1 森林參數測量
森林參數測量是為了更好地理解和預測陸地生態系統如何應對和影響環境變化,對促進森林生態和改善森林管理具有重要意義[18]。林分尺度的參數包括林冠高度、林分平均樹高、優勢木平均高度、郁閉度、地上生物量、森林蓄積量、株數密度、物種豐富度、林齡等;單木尺度的參數包括樹高、冠幅、枝下高、胸徑、生物量等。傳統光學遙感測量方法因其不能穿透林冠層,主要依靠反演估算,精準度不夠。一些林內光學測樹儀器,也因為陰暗的林內環境而達不到良好的效果。LiDAR主動遙感技術在森林參數的定量測量和反演上取得了成功的應用[19],發射的激光脈沖能部分穿透植被冠層,易于獲取整個植被冠層的三維結構和冠層下的地形,在垂直緯度參數測量方面優勢更為顯著。根據應用場景不同,基于LiDAR進行森林調查可采用機載式測量林分尺寸參數與陸載式測量單木尺度參數,光斑尺寸由大光斑(直徑8~70 m)向小光斑(直徑小于8 m)發展,激光輸出波形由單波形向全波形發展。
最早公開發表應用LiDAR進行森林參數測量的是前蘇聯,隨后,機載LiDAR系統開始用于大范圍的森林資源調查和林業測量。García等[20]基于Optech-ALTM3033激光雷達系統測量的高度和強度數據估算了森林植被生物量,然后根據其中的碳含量參數計算出當前區域中的植被碳含量。Anderson等[21]使用Lecia BLK 360激光雷達,利用獲取的LiDAR點云數據近似森林群落結構的方式預測了物種豐富度。Sun等[22]應用一種機載全波形LiDAR結合高光譜數據測量熱帶干燥林林齡,有效描述了森林更新情況。Mahoney等[23]基于Optech ALTM-3100激光雷達,結合野外繪圖和星載激光高度測量系統測量了林分高度和樹冠閉合度參數,其中林分高度平均誤差在1 m以內,樹冠閉合度平均誤差為5%。Simonsona等[24]利用高分辨率的機載激光雷達Optech ALTM 3033數據反演了葡萄牙南部橡樹林平均樹高,與野外獲取的平均樹高之間的相關系數為0.85。Ferraz等[25]基于Optech ALTM-3100激光雷達,應用一種基于三維自適應均值漂移技術的方法將整個點云分解為與單個樹冠相對應的3D點云群,用于測量樹高、樹冠面積以及樹木分布密度等參數。龐勇等[26]基于RIEGL LMS Q 280i激光雷達數據計算樹高,總體平均測量精度為90.59%,其中闊葉樹的精度高于針葉樹。大量國內外研究結果表明,激光雷達對林木冠層高度反演技術已趨于成熟。
2.2 果樹靶標幾何特征探測
精準變量噴霧技術能夠實現果樹靶標的按需施藥,在提高農藥有效利用率的同時又能減少農藥危害[27]。果樹靶標幾何特征檢測是實現果園風送噴霧機精準變量噴霧的基礎和前提,特征參數主要包括樹冠高、寬、生物量體積、葉面積以及衍生計算得到的葉面積密度(LAD,Leaf area density)和葉面積指數(LAI,Leaf area index)等。為獲取精準的靶標幾何特征參數,各類無損、無接觸、快速且可重復的傳感器層出不窮,如雷達系統、醫用或工業用檢測儀器(高分辨率計算機體層X線攝影技術,核磁共振成像)、數字攝像機、光傳感器、立體視覺、超聲波傳感器以及LiDAR等,其中,LiDAR精度高、響應快、能夠獲得靶標的三維模型,是最具發展潛力的靶標幾何特征探測傳感器[28-29]。
Arnó等[30]基于SICK LMS 200激光雷達探測系統,測量計算了葡萄藤的高度、橫截面積、樹冠體積和樹面積指數,驗證了以上參數與葉面積指數的相關性,其中樹面積指數與葉面積指數相關性最高。Mahmud等[31]開發了一種基于VLP-16激光雷達傳感器的樹冠密度測量系統用于指導果園精準施用農藥,驗證了靶標點云數據與葉片數量存在較強的相關性,小樹區域相關系數為0.82,大樹區域相關系數為0.95。Zeng等[32]基于VLP-16激光雷達傳感器開發了果樹靶標探測系統,通過算法分割出栽培用網格線、支撐點與樹干部分,總體精度分別為88.6%,82.1%和94%,根據這些參數計算了靶標樹冠高度、密度和深度等參數,為果園精準施藥和機械化修剪提供基礎信息。張美娜等[33]基于SICK LMS 111激光雷達掃描傳感器構建了一種靶標精準探測系統,提出了靶標網格化噴施區域內葉面積密度參數的計算方法。
2.3 作物幾何表型特征檢測
作物幾何表型特征檢測是作物育種高通量表型分析的支撐技術之一,輔助測量作物株高、葉片角度分布、葉面積、葉面積密度等表型特征,用于檢測不同基因型與環境條件下的作物長勢,為篩選優良作物品種、預測作物產量、指導田間管理和實現對農業投入和處理的精準控制提供數據基礎[34]。高通量作物表型系統中的傳感器種類豐富,主要包括RGB相機、多光譜/高光譜成像傳感器、溫度近紅外成像傳感器、葉綠素熒光成像傳感器以及LiDAR傳感器等,如表1所示,可測量光合作用系統的熒光特性、生長速度、抗病性、非生物脅迫耐受性、總體形態、物候學等全面的表型特征[35]。隨著LiDAR技術的發展與成本的降低,越來越多的表型平臺將LiDAR作為基本配置,構建作物的3D結構信息,如田間表型移動平臺、設施表型平臺、無人機低空遙感平臺。
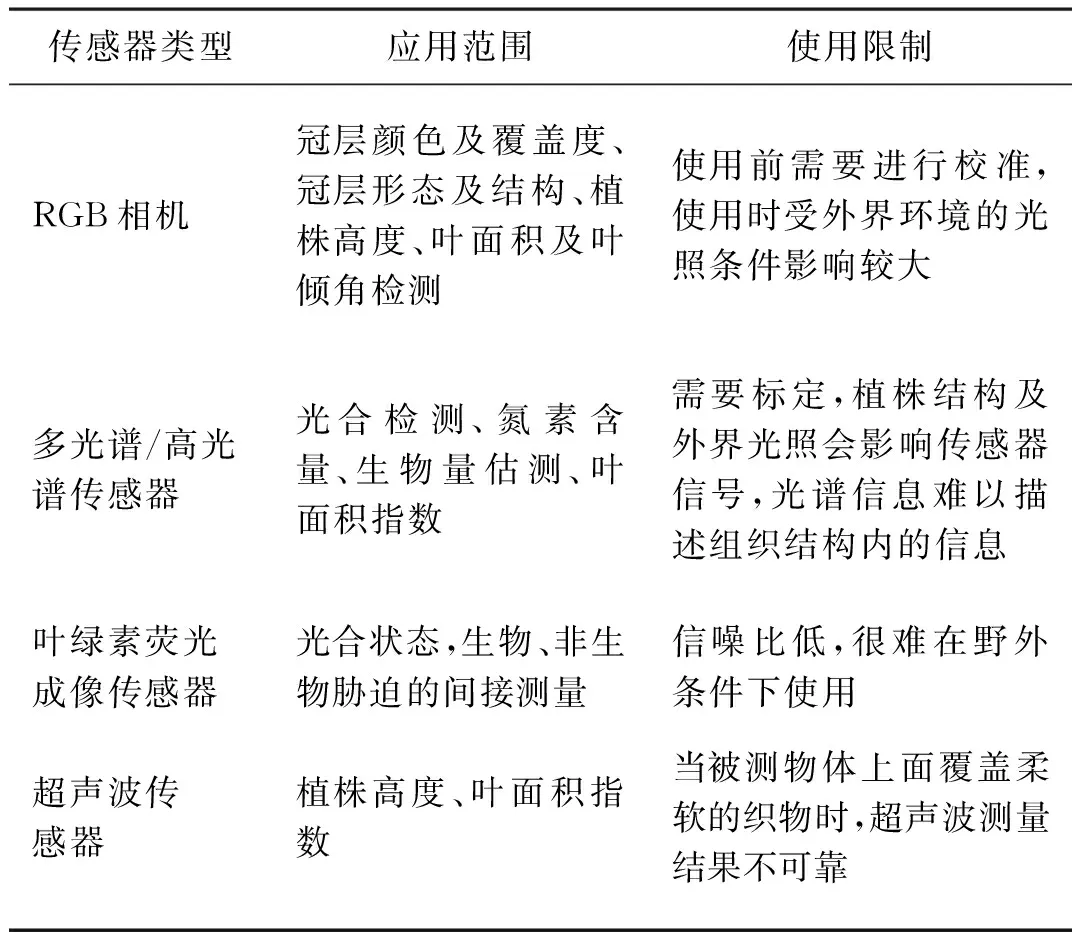
表1 常用傳感器應用范圍和使用限制Tab. 1 Application range and usage limits of common sensors
田間作物表型系統研究方面,Greaves等[36]利用Riegl VZ-400激光雷達數據衍生的灌木生物量估算了灌木葉面積,其中激光雷達數據和針葉樹生物量相關系數為0.97。Saeys等[37]使用SICK LMS 200/400兩種LiDAR傳感器,在收獲機不同行駛速度和震動條件下估算了收獲機前方作物密度參數,三維重建算法的相關系數在0.63到0.93之間。Jimenez-Berni等[38]基于SICK LMS 400激光雷達和Phenomobile Lite移動平臺設計了一種田間作物表型系統,提出了兩種基于LiDAR獲取地上生物量的計算方法并進行了試驗驗證。程曼等[39]利用地面激光雷達SICK LMS 291對花生冠層結構進行掃描,獲取其三維點云數據,通過分析有效點云數據集生成的冠層高度矩陣,得到冠層的高度特性。
在設施作物表型系統研究方面,Wang等[40]開發了一種低成本的二維LiDAR室內植物表型系統,通過系統運動與數據配準可獲取作物三維點云數據,線性回歸分析表明,系統測量的葉片最大高度、葉柄高度、葉尖高度、葉片表面積4種參數與地面真實值的相關系數分別為0.98、0.98、0.99、0.92。郭慶華等[41]研發了一套以Faro Focus X120激光雷達為主,集成高分辨率相機、熱成像儀、高光譜成像儀等傳感器的高通量作物測量平臺—Crop 3D,與傳統作物表型測量技術相比,Crop 3D優勢在于能夠通量化、同步地對作物各生長時期進行多源表型數據的獲取并提取株高、株幅、葉長、葉寬、葉傾角和葉面積等參數。
在無人機低空遙感研究方面,Lin等[42]搭建了一個無人機低空遙感的通用框架,用于進行多時間尺度LiDAR數據控制與作物特征檢測,網格垂直方向與平面方向上的多時相點云距離差為±3 cm與±8 cm。王慶等[43]以大田甜菜為研究對象,探究無人機分別搭載RGB相機與RIGEL VUX-1UAV激光雷達系統對大田作物株高估算的精度差異,結果表明基于激光雷達系統估算的株高相關性較高,為0.88。
2.4 農業車輛自主導航
農業車輛自主導航是支撐智能農機與精準農業的關鍵技術之一[44]。自主導航農機裝備的應用可以減少勞動力投入,減輕駕駛員的勞動強度,提高作業的準確性。搭載自主導航控制系統的動力裝備通過掛接各種農機具能夠精準完成耕種、除草、施肥、施藥、收獲等多種作業環節,是實現無人農場的基礎[45]。近年來,大田自主導航技術與產品已趨于成熟,如AF302BD-2.5RD、NX300、RinoSteer等。盡管如此,農業車輛作業環境是典型的非結構化環境,應用在其中的傳感器需要克服地面不平整、障礙物種類多等困難,以機器視覺和衛星導航系統為傳感器核心的農業車輛自主導航仍存在一些問題,機器視覺受作業環境、光照條件的影響比較大,衛星導航系統則易受衛星信號的影響;而LiDAR不受能見度或環境水平的限制,能以較高頻率提供大量準確的距離信息,可靠地提供周圍物體的方位和深度信息,能夠進行障礙物檢測,在果園和設施場景中的應用優勢更為明顯。
在果園作業裝備自主導航系統研究方面,Underwood等[46]基于SICK LMS 291激光雷達傳感器提出了一種果園田間果樹識別與定位方法,采用隱式半馬爾可夫模型分割果樹個體,定位與識別精度達98.2%。李秋潔等[47]基于二維LiDAR獲取果樹行間數據,設計了橢圓感興趣區域提取相鄰樹行、兩步樹行分割法獲取相鄰樹行數據,通過最小二乘法擬合樹行直線,樹行中心線作為導航路徑,試驗結果表明,在偏航角不大于15°、橫向偏差不大于1 m、缺樹率不大于25%時均能將車輛軌跡與道路中心線的橫向偏差控制在±14 cm內。劉偉洪等[48]提出一種基于R-Fans-16 3D激光雷達的果樹行識別與導航線擬合的方法,在梨園中,0.68 m/s與0.135 m/s的速度下,橫向誤差絕對值分別不超過21.3 cm與22.1 cm。劉星星等[49]基于低成本的SICK LMS 291單線激光雷達,提出一種基于最小二乘法與支持向量機融合的樹行識別與導航方法,試驗結果表明橫向誤差平均值不超過17.8 mm。
在設施作業裝備自主導航系統研究方面,侯加林等[50]研制了基于前后雙FS-D10激光雷達的溫室運輸機器人導航系統,與單激光雷達相比,增加了環境掃描范圍,提高了建圖效率及實時避障能力,車載系統分別以0.2、0.5和0.8 m/s的速度運行時,實際導航路徑與目標路徑的平均偏差小于13 cm,標準差小于5 cm。季宇寒等[51]搭建了基于SICK LMS 511激光雷達的巡檢機器人導航平臺,使用自適應蒙特卡羅定位(AMCL)算法估計機器人位置和姿態,通過經典的PID算法完成機器人驅動控制,試驗結果表明,在1 m/s 的速度下,位置與航向偏差的平均絕對誤差分別小于5 cm和1.1°。
2.5 農藥霧滴漂移檢測
植保機械施藥過程中產生的最大污染源之一為漂移的農藥霧滴,有證據表明,殺蟲劑可以通過氣流傳播數千公里[52],對人類健康和環境都有風險。另一方面,霧滴漂移造成的損失可達所用農藥產品的30%~50%[53],不僅造成經濟損失,還產生了農業面源污染。因此,分析影響霧滴飄移的主要因素、研究農藥霧滴飄移機理,可為植保機械噴霧部件的研究提供理論依據,有效提高植保機械的噴施效果,減少農藥飄失,增強環境保護,具有重要的現實意義[54-55]。測量霧滴漂移的傳統方法主要通過被動收集器和示蹤劑在現場采樣并進行后續化學/物理試驗實現,勞動強度大,依賴外部環境條件,只提供點和時間的綜合測量信息,無動態過程,具體可參照國際標準ISO標準22866—2005。與傳統方法不同,應用LiDAR技術可以實現動態實時測量,獲得具有高時間、空間分辨率的多維數據信息,消耗更少的人力和時間資源,并且不需要后續的化學分析,主要用于定性研究農藥羽流的移動和擴散。
基于LiDAR系統測量霧滴漂移的早期研究在1989年,Hoff等[56]建立了一個激光雷達系統,用于檢測空中噴灑農藥霧滴的幾何結構和沉積情況,測量了噴灑飛機翼尖渦流中的近場農藥噴灑運動,證明了LiDAR可以作為長期預測漂移量的一種新方法。國際上,西班牙萊里達大學的研究團隊長期開展了基于LiDAR測量霧滴漂移的研究[57-60],2015年,團隊搭建了一種對人眼安全的LiDAR系統[57],可測量50~100 m 范圍內的霧滴漂移運動;2016年,應用開發的LiDAR系統開展了霧滴漂移試驗[58],結果表明激光雷達測量的噴霧漂移量和被動收集器得到的數據之間相關系數大于0.85,同時,應用該系統試驗對比了低漂移噴頭與標準噴頭的作業效果,結果表明低漂移噴頭減少霧滴漂移57%;2019年,應用開發的LiDAR系統對噴霧機分別安裝10種空心錐噴頭靜態噴霧條件下,開展了23項霧滴漂移試驗[59];2020年,應用開發的LiDAR系統分別在四種果樹(桃、柑橘、蘋果和葡萄)生長環境下測量并評估噴霧機動態作業下標準與低漂移噴頭的霧滴漂移情況[60]。Gil等[61]在葡萄園施藥期間,使用SICK LMS 200激光雷達傳感器測量霧滴漂移,實驗結果表明測量值與真實值間相關系數為0.91,因此采用的檢測方法可以作為評估漂移的替代方案。
上述5個農業場景中應用的LiDAR系統主要參數與應用如表2所示。

表2 主要應用激光雷達型號及參數Tab. 2 Main types and parameters of lidar applications
3 討論
綜合上述5個農業場景可知,LiDAR的探測對象主要為農田環境與作物本身兩大類,分別具有其特殊性。農田環境是復雜的非結構化環境,地面地形復雜,環境中光照和氣候條件多變且不可控制,目標物表面過亮會導致鏡面反射,風、霧、塵等引起的偏差和遮擋等,都會對LiDAR數據精度和質量產生影響。另一方面,農作物是有機的生命體,作物品種、生長期、栽培模式、測量尺度等不同因素都會影響LiDAR測量系統的檢測效果。下面簡要分析LiDAR在相應農業場景應用中的發展趨勢。
3.1 森林參數測量
LiDAR數據已經成為預測一系列森林屬性的關鍵數據源,可直接獲得單株木的位置、樹高和冠幅這3個垂直結構參數。隨著機載LiDAR技術獲取與處理多源數據能力提升,樹種識別效率得到了一定程度的提高,為森林碳儲量估算、森林生物多樣性、森林再生等研究提供了基礎。應用LiDAR進行森林調查,未來將重點集中在提高LiDAR測量精度,融合LiDAR與高光譜圖像、星載激光數據等其它傳感器數據,以及構建數據處理體系與標準化流程等方面。
3.2 果樹靶標幾何特征探測
基于LiDAR進行果樹靶標探測的關鍵在于提取計算合適的幾何特征參數,目前國內外研究主要集中在靶標生物量體積的計算,近些年開始增加表征樹冠枝葉稀疏狀況的葉面積密度參數,未來將在靶標幾何特征的基礎上拓展病蟲害信息的檢測,從而綜合確定精準的施藥處方。
3.3 作物幾何表型特征檢測
基于LiDAR進行作物幾何特征檢測具有獨特的優勢,使作物三維形態的表達更加立體、細致,為提取更多的作物幾何特征參數奠定了基礎,未來將重點集中在新型幾何特征參數的全自動提取算法上,平衡精準性與實時性指標,更好的服務于高通量表型系統。
3.4 農業車輛自主導航
基于LiDAR的農業車輛自主導航系統主要應用二維激光雷達沿作物行行駛獲取環境三維數據信息,有效地降低了成本,但測量精度有待提高。隨著三維激光雷達傳感器技術的發展,應用高線數、低成本的固態三維激光雷達為未來的發展方向,能夠獲得高精度、高速率、廣視角的大量三維點云數據,空間信息更加豐富,進一步提升對農業復雜多變環境的適應性。
3.5 農藥霧滴漂移檢測
LiDAR由于其在時間和空間分辨率、實時測量,以及其減少的勞動力和時間等方面的優勢,成為傳統測量方法的有利替代方案。同時,在霧滴沉積測量方面,相關研究結果表明,激光雷達測量的漂移云和放置在測試臺上的人工收集器上獲得的霧滴沉積分布之間具有良好的相關性。在霧滴漂移檢測領域中,應用的LiDAR系統呈現定制化的趨勢,即根據應用需求設計開發專用的測量系統,在降低成本、提高系統專用性上有所提高,是未來發展的主要方向之一。
綜上所述,各類農業場景對LiDAR技術及數據處理方法的需求和挑戰仍在繼續。隨著LiDAR新技術的不斷涌入,應用固態激光雷達、單光子激光雷達、高密度激光雷達、全波形(FWF)激光雷達、多光譜/高光譜激光雷達等新型LiDAR傳感器,將在數據多尺度、精準性、全面性、豐富性和實時性上不斷適應農業場景的不同層面需求,更好地支撐現代精準農業發展。
4 結論
隨著農業產業向現代農業、精準農業、智慧農業不斷演進,農業場景對新型傳感器的需求日益迫切,傳感器作為人類感知的替代能更全面、更精準地獲取作物、環境等相關信息,是農業現代化發展的基礎性、關鍵性的支撐技術。與視覺傳感器、光譜傳感器、超聲波等其他類型傳感器相比,LiDAR傳感器不易受光環境影響、可三維建模、分辨率高、抗干擾能力強、技術與產品成熟等特點使其在農業領域應用中具有獨特的優勢。本文重點介紹了LiDAR傳感器的性能特點、工作原理和分類、市場應用與新技術;通過國內外大量研究文獻的篩選分類,總結了LiDAR傳感器在森林參數探測、果樹靶標幾何特征探測、作物表型幾何特征檢測、農用車輛自主導航定位以及農藥霧滴飄移檢測這5類農業場景的應用進展與發展趨勢;針對農業場景的特點,現階段應用的LiDAR傳感器技術與數據處理方法仍存在局限與不足,為此,展望了固態激光雷達、單光子激光雷達、高密度激光雷達、全波形(FWF)激光雷達、多光譜/高光譜激光雷達等新型LiDAR技術與產品在未來農業場景中的應用潛力,指出了與LiDAR傳感器配套的自動化采集系統與數據智能分析方法將成為研究重點。
猜你喜歡
今日農業(2022年1期)2022-11-16 21:20:05
今日農業(2022年3期)2022-11-16 13:13:50
今日農業(2022年2期)2022-11-16 12:29:47
今日農業(2021年14期)2021-11-25 23:57:29
今日農業(2021年13期)2021-08-14 01:38:18
今日農業(2020年15期)2020-12-15 10:16:11
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
