煤礦提升機(jī)提升位置的精確指示與控制
2022-10-29 03:50:12付中華
中國(guó)煤炭 2022年10期
付中華
(山西省長(zhǎng)治經(jīng)坊煤業(yè)有限公司,山西省長(zhǎng)治市,047100)
0 引言
近年來,我國(guó)煤礦采煤機(jī)械化程度逐漸走高。對(duì)于煤礦安全生產(chǎn)中的一些關(guān)鍵設(shè)備,例如煤礦提升機(jī)提升位置指示器,需要對(duì)提升容器運(yùn)行位置進(jìn)行精確指示。煤礦提升機(jī)提升位置指示器是一種用來指示提升機(jī)罐籠等提升容器在提升井中狀態(tài)的儀器,也是提升機(jī)的重要組成部分[1]。目前,國(guó)內(nèi)的煤礦提升機(jī)提升位置指示器為牌坊式深度指示器和圓盤深度指示器。它們的信號(hào)都是從主軸直接獲取,以此推測(cè)提升容器的位置 ,然后通過自整角機(jī)來調(diào)控其運(yùn)動(dòng)的位置。這種控制方式誤差較大、精度不足,不僅威脅到生產(chǎn)效率,更是埋下了很多的安全隱患[2]。磁偶式無桿氣缸具有定位精度高、安裝方便、構(gòu)造簡(jiǎn)單、價(jià)格低廉等優(yōu)點(diǎn)[3],因此非常適用于驅(qū)動(dòng)煤礦提升位置指示器的運(yùn)行。目前,影響氣動(dòng)位置伺服控制精度的主要因素是:氣動(dòng)系統(tǒng)的非線性特性,主要表現(xiàn)在比例方向控制閥質(zhì)量流量方程的非線性[4]、系統(tǒng)數(shù)學(xué)模型的非線性[5]與磁偶式無桿缸運(yùn)動(dòng)時(shí)摩擦力的非線性;合適的控制策略,合適的控制策略可以對(duì)氣動(dòng)系統(tǒng)數(shù)學(xué)模型誤差進(jìn)行彌補(bǔ),且可以進(jìn)一步提高氣動(dòng)伺服系統(tǒng)的位置控制精度[6]。為了提高氣動(dòng)系統(tǒng)的位置控制精度,學(xué)者們一般將氣動(dòng)系統(tǒng)的數(shù)學(xué)模型進(jìn)行線性化。但如果模型的運(yùn)動(dòng)距離與最初預(yù)定的工作范圍相差較大時(shí),其設(shè)計(jì)與分析就失去了意義[7]。
1 氣動(dòng)位置伺服控制系統(tǒng)的研究現(xiàn)狀
目前,國(guó)內(nèi)外學(xué)者對(duì)氣動(dòng)系統(tǒng)的非線性特性與控制方法進(jìn)行了大量的研究,并且取得了不小的成果。美國(guó)加州大學(xué)的博羅·詹姆斯(Borrow Jams)[8]運(yùn)用試湊法得出:氣缸內(nèi)排出氣體的質(zhì)量流量與比例閥的控制電壓呈二次曲線關(guān)系;維瓦羅(Virvalo)[9]在分析控制閥物理結(jié)構(gòu)的基礎(chǔ)上,研究了控制閥內(nèi)部的飽和、滯后、泄漏、零位偏移等非線性現(xiàn)象;柏艷紅[10]與ZHANG Y等[11]通過對(duì)比例方向控制閥與擺動(dòng)氣缸的物理特性進(jìn)行分析與研究,建立并驗(yàn)證了擺動(dòng)氣缸非線性位置伺服控制系統(tǒng)的數(shù)學(xué)模型的正確性;石炳存[12]通過對(duì)重要?dú)鈩?dòng)元件的特性進(jìn)行分析,建立了有桿氣缸位置伺服控制系統(tǒng)的非線性數(shù)學(xué)模型,并且反映出了氣動(dòng)位置伺服控制系統(tǒng)的特性;HSU S C[13]基于現(xiàn)有PID控制閉環(huán)系統(tǒng),設(shè)計(jì)了混合模糊重復(fù)控制方法與前饋補(bǔ)償器和零相位誤差跟蹤控制器,展現(xiàn)出了很高收斂速度與穩(wěn)定性;詹長(zhǎng)書[14]通過對(duì)氣動(dòng)位置伺服控制系統(tǒng)以及系統(tǒng)中氣動(dòng)元件進(jìn)行研究,建立了氣動(dòng)系統(tǒng)的數(shù)學(xué)模型并運(yùn)用模糊PID控制算法,系統(tǒng)的自適應(yīng)能力得到了改善;柏艷紅等[15]通過運(yùn)用PID與氣動(dòng)輔助限位控制算法,提高了擺動(dòng)氣缸位置伺服控制系統(tǒng)的穩(wěn)定性與位置控制精度。
雖然國(guó)內(nèi)外學(xué)者已經(jīng)對(duì)氣動(dòng)系統(tǒng)的非線性特性與控制方法進(jìn)行了大量的研究,但對(duì)于磁偶式無桿氣缸非線性位置伺服控制的研究幾乎沒有。因此,以磁偶式無桿氣缸和比例方向控制閥為研究對(duì)象,建立了磁偶式無桿氣缸非線性位置伺服控制系統(tǒng)的數(shù)學(xué)模型,并通過設(shè)計(jì)RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制器,進(jìn)一步提高了磁偶式無桿氣缸非線性位置伺服控制系統(tǒng)的位置控制精度。
2 實(shí)驗(yàn)平臺(tái)的搭建
為了順利地搭建氣動(dòng)系統(tǒng)的實(shí)驗(yàn)平臺(tái),首先需要了解氣動(dòng)系統(tǒng)的工作原理,以磁偶式無桿氣缸為控制對(duì)象的氣動(dòng)位置伺服控制系統(tǒng)的工作原理如圖1所示。
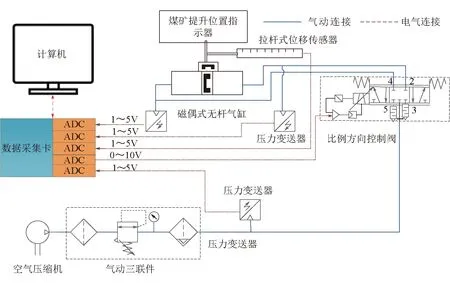
圖1 磁偶式無桿氣缸位置伺服控制系統(tǒng)原理
該氣動(dòng)系統(tǒng)的工作原理是:首先空氣壓縮機(jī)通過其內(nèi)部的活塞往返運(yùn)動(dòng),會(huì)產(chǎn)生一定量的氣體。然后氣動(dòng)三聯(lián)件會(huì)對(duì)氣體進(jìn)行干燥、凈化,壓力變送器可以檢測(cè)氣缸兩端的氣體壓力。通過改變比例方向控制閥的控制電壓,可以實(shí)現(xiàn)磁偶式無桿氣缸的往返運(yùn)動(dòng),進(jìn)而可以帶動(dòng)提升位置指示器運(yùn)動(dòng)。拉桿式位移傳感器可以用來檢測(cè)磁偶式無桿氣缸運(yùn)動(dòng)的距離,檢測(cè)到的數(shù)據(jù)將會(huì)通過數(shù)模轉(zhuǎn)換,最后在計(jì)算機(jī)上顯示出來。根據(jù)上述實(shí)驗(yàn)原理搭建的實(shí)驗(yàn)平臺(tái)如圖2所示。
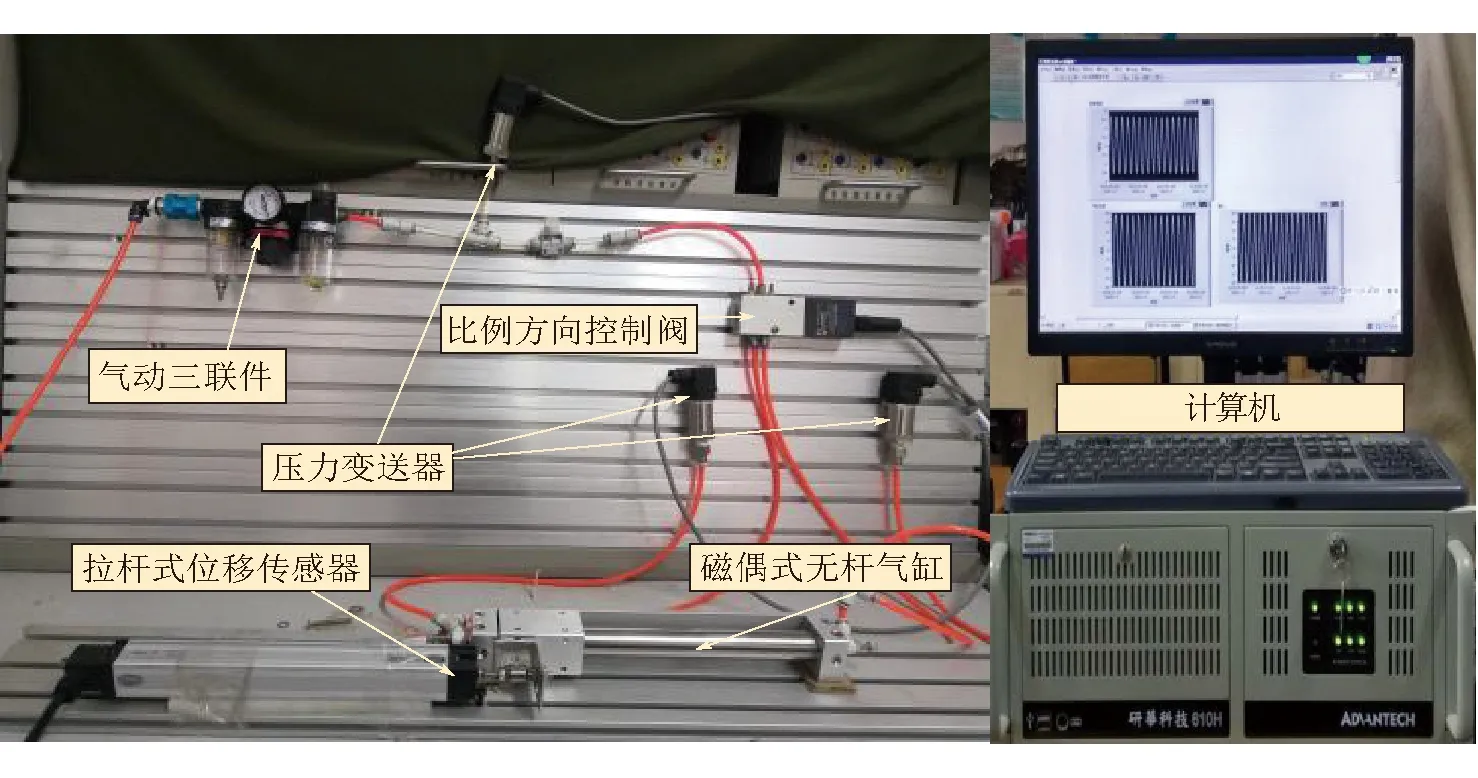
圖2 磁偶式無桿氣缸位置伺服控制系統(tǒng)實(shí)驗(yàn)平臺(tái)
3 磁偶式無桿氣缸非線性位置伺服控制系統(tǒng)數(shù)學(xué)模型的建立與驗(yàn)證
3.1 比例方向控制閥質(zhì)量流量方程的建立

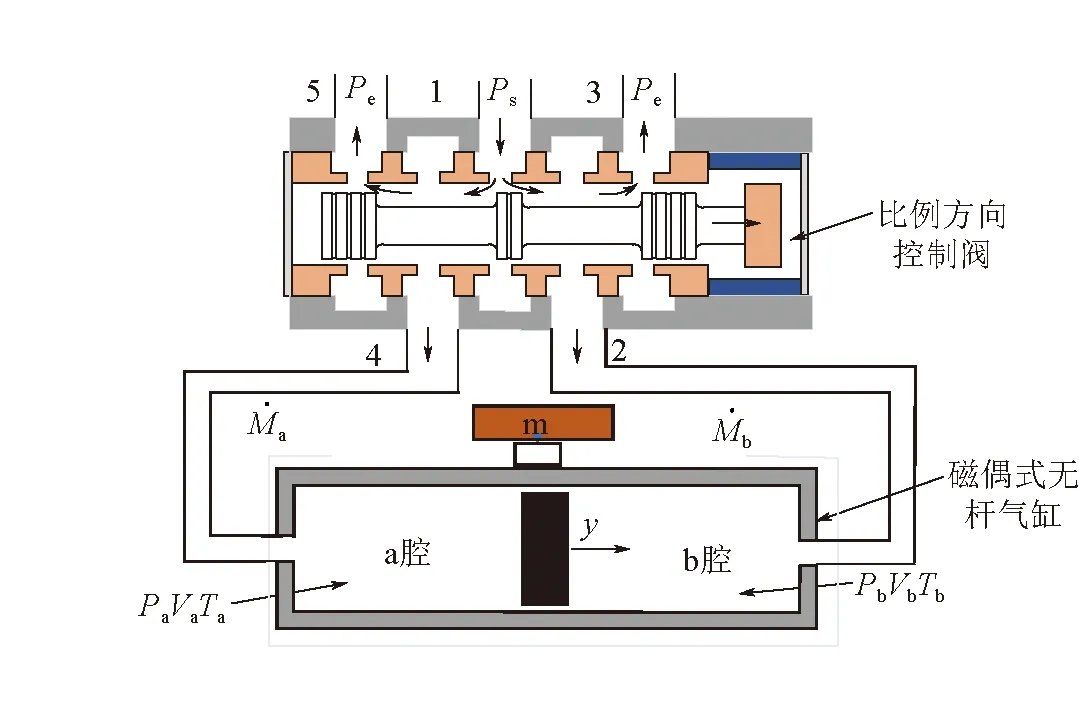
圖3 閥控氣缸系統(tǒng)的氣體流動(dòng)原理
閥控缸系統(tǒng)具有十分復(fù)雜的數(shù)學(xué)模型,為了使閥控缸系統(tǒng)的數(shù)學(xué)模型更加簡(jiǎn)化,本文做出了以下幾點(diǎn)假設(shè)[16]:
(1)假設(shè)空氣為理想型氣體;
(2)氣動(dòng)系統(tǒng)中空氣的流動(dòng)為等熵絕熱;
(3)容腔中氣體溫度與壓力處處相同;
(4)氣缸在運(yùn)動(dòng)過程中,腔室內(nèi)沒有與外界發(fā)生熱交換。
式中:h0——閥芯與套筒之間的間隙;
dh——套筒的內(nèi)徑,取0.006 023 m;
ds——閥芯的臺(tái)肩外徑,取0.006 m;
R——?dú)怏w常數(shù),為8.314 32×103N·m/(kg·K);
S——閥開口有效面積,mm2;
μ——?dú)怏w微元粘性系數(shù),取0.000 018 3 Pa·s;
L0——間隙初始長(zhǎng)度,m;
xv——閥芯位移,m;
b——臨界壓力比,為0.528;
Ts——供氣溫度,K;
κ——等熵指數(shù),為1.4;
Cv——流量系數(shù);
3.2 磁偶式無桿氣缸能量方程與壓力微分方程的建立
根據(jù)熱力學(xué)第一定律,可以推導(dǎo)出磁偶式無桿氣缸的能量方程為:
κRTiadMa=VadPa+κPadVa
(5)
式中:Tia——進(jìn)入氣體的溫度,K;
dMa——進(jìn)入氣體的質(zhì)量,kg。
閥芯正向移動(dòng)時(shí),磁偶式無桿氣缸a腔與b腔室的壓力微分方程分別為:
(6)
3.3 磁偶式無桿氣缸動(dòng)力學(xué)方程的建立
由于Stribeck摩擦模型[17]在描述物體運(yùn)動(dòng)的摩擦力時(shí),可以達(dá)到90%以上的精度。因此,本文在描述磁偶式無桿氣缸運(yùn)動(dòng)的摩擦力時(shí),運(yùn)用了Stribeck摩擦模型。其數(shù)學(xué)模型如下所示:
(7)
式中:Ff——摩擦力,N;
Fs——物體所受到的最大靜摩擦力,N;
v——速度,m/s;
Fe——物體所受到的外力,N。
(8)
式中:B——粘性摩擦系數(shù);
Fc——庫(kù)侖摩擦力,N;
vs——Stribeck的臨界速度,m/s;
δs——經(jīng)驗(yàn)系數(shù),一般為0.5~2.0。
動(dòng)力學(xué)方程為:
A(Pa-Pb)=ma+Ff
(9)
式中:A——活塞的有效面積,取0.000 491 m2;
a——?dú)飧走\(yùn)行的加速度,m/s2。
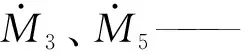
根據(jù)建立的質(zhì)量流量方程、能量方程、壓力微分方程、動(dòng)力學(xué)方程可以構(gòu)建磁偶式無桿氣缸位置伺服控制系統(tǒng)的數(shù)學(xué)模型。將上述所有方程代入到MATLAB中進(jìn)行仿真,然后進(jìn)行定位實(shí)驗(yàn)驗(yàn)證,施加一個(gè)58 mm的階躍信號(hào),實(shí)驗(yàn)與仿真的結(jié)果如圖4所示。
然后再進(jìn)行軌跡跟蹤實(shí)驗(yàn),施加一個(gè)正弦信號(hào),初始值為38 mm,頻率為2 rad/s,幅值是15.2 mm。實(shí)驗(yàn)與仿真的結(jié)果如圖5所示。
從圖4與圖5中可以看出,實(shí)驗(yàn)曲線與仿真曲線的運(yùn)動(dòng)趨勢(shì)基本一致,不僅可以說明數(shù)學(xué)模型的正確性,也充分反應(yīng)了數(shù)學(xué)模型的有效性。
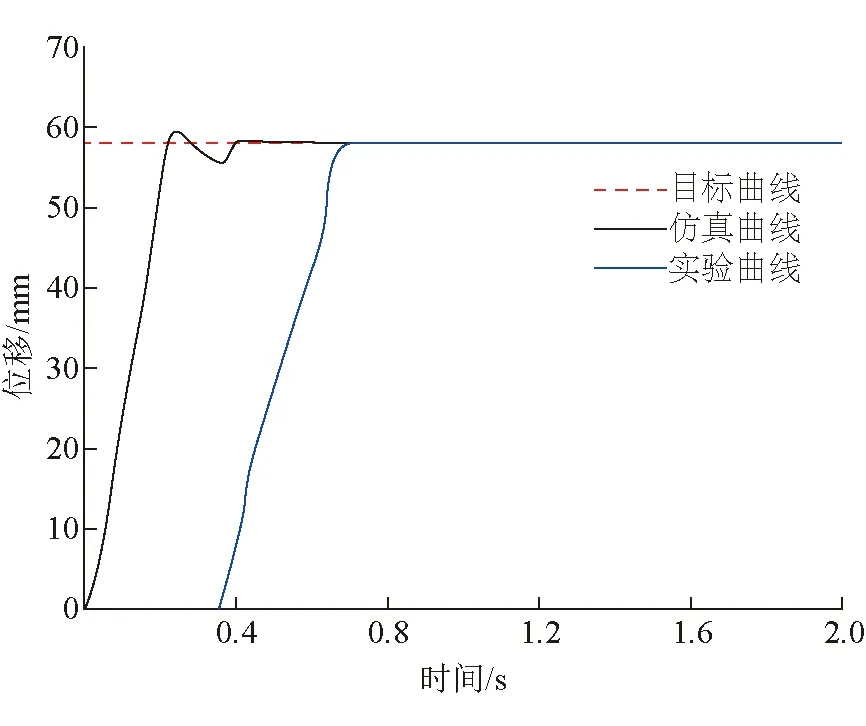
圖4 定位實(shí)驗(yàn)仿真曲線
圖5 軌跡跟蹤實(shí)驗(yàn)仿真曲線
4 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的控制實(shí)驗(yàn)
4.1 RBF神經(jīng)網(wǎng)絡(luò)的基本原理及構(gòu)成
麥卡洛赫(MCCULLOCH W)和皮特斯(PITTS W)在1943年提出了神經(jīng)元的數(shù)學(xué)模型[18],1985年,鮑威爾(POWELL)[19]提出了多變量插值的徑向基函數(shù)(RBF-Radial Basis Function)。1988年,洛韋(LOWE)等將RBF應(yīng)用于神經(jīng)網(wǎng)絡(luò)設(shè)計(jì),并將RBF神經(jīng)網(wǎng)絡(luò)與BP神經(jīng)網(wǎng)絡(luò)進(jìn)行了對(duì)比[20],最后揭示了二者的關(guān)系。RBF神經(jīng)網(wǎng)絡(luò)具有學(xué)習(xí)速度快,簡(jiǎn)單易懂、泛化性能較強(qiáng)和計(jì)算簡(jiǎn)便等特點(diǎn)。RBF神經(jīng)網(wǎng)絡(luò)與BP神經(jīng)網(wǎng)絡(luò)相比,具有更強(qiáng)的生命力。因此,在某些領(lǐng)域內(nèi)RBF神經(jīng)網(wǎng)絡(luò)逐漸替代BP神經(jīng)網(wǎng)絡(luò)。
RBF神經(jīng)網(wǎng)絡(luò)由輸入層、隱含層以及輸出層構(gòu)成。輸入層可以將神經(jīng)網(wǎng)絡(luò)與外界相連接,網(wǎng)絡(luò)和外部的輸入構(gòu)成信號(hào)神經(jīng)元;隱含層神經(jīng)元是一種中心點(diǎn)徑向?qū)ΨQ衰減的非負(fù)非線性函數(shù),輸入層到隱含層的變換是非線性[21-22]。輸出層是對(duì)所有輸入信號(hào)做出響應(yīng),隱含層到輸出層是線性的,并且為輸出層的激活信號(hào)提供響應(yīng)。圖6描述了一個(gè)具有n個(gè)輸入節(jié)點(diǎn)、m個(gè)隱層節(jié)點(diǎn)以及k個(gè)輸出節(jié)點(diǎn)的3層RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)。
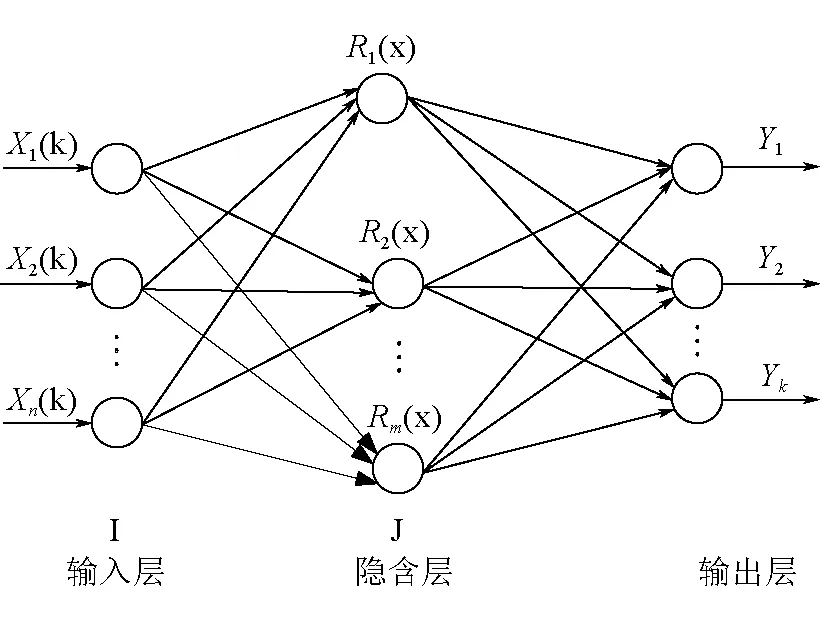
圖6 RBF神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
假設(shè)輸入層X=[x1,x2,…,xn],隱含層到輸出層的權(quán)值為W=[w1,w2,…,wj]T,徑向基向量為hj,神經(jīng)網(wǎng)絡(luò)的輸出為ym。徑向基向量的數(shù)學(xué)表達(dá)式為:
hj=fj(x1,x2,…,xn)
(10)
式中:fj——徑向基函數(shù),j=1,2,3,…,m。
hj到y(tǒng)m的映射,表達(dá)式為:
(11)
高斯函數(shù)具有結(jié)構(gòu)簡(jiǎn)單與對(duì)稱性好等優(yōu)點(diǎn)。因此,本文的徑向基函數(shù)設(shè)為高斯函數(shù),如式12所示:
(12)
式中:cji——隱含層神經(jīng)元的中心點(diǎn),cji=[cj1,…,cjn],i=1,2,…,n;
bj——高斯函數(shù)的寬度向量,bj=[b1,…,bm]T。
4.2 RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制器的設(shè)計(jì)
由于閥控缸系統(tǒng)的非線性特性非常復(fù)雜,因此將與RBF神經(jīng)網(wǎng)絡(luò)與PID控制相結(jié)合。利用RBF神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)特性實(shí)現(xiàn)對(duì)PID參數(shù)的優(yōu)化,來提高位置的精確控制。PID控制器如式13所示:
(13)
式中:u(k)——PID控制器在第k次采樣時(shí)的輸出;
e(k)——第k次采樣時(shí)輸入的誤差;
e(k-1)——第k-1次采樣時(shí)輸入的誤差;
e(k-2)——第k-2次采樣時(shí)輸入的誤差;
Kp——比例系數(shù);
Ki——積分時(shí)間常數(shù);
Kd——微分時(shí)間常數(shù)。
基于RBF優(yōu)化PID控制器的磁偶式無桿氣缸控制結(jié)系統(tǒng)構(gòu)如圖7所示。rin(k)為給定的輸入信號(hào),yout(k)為煤礦提升位置指示器輸出的位置信號(hào)。PID控制的輸入為誤差信號(hào)ec(k),RBF神經(jīng)網(wǎng)絡(luò)的輸入為煤礦提升位置指示器的位移信號(hào)與PID控制器的輸出,RBF神經(jīng)網(wǎng)絡(luò)的輸出是對(duì)PID控制參數(shù)的補(bǔ)償。
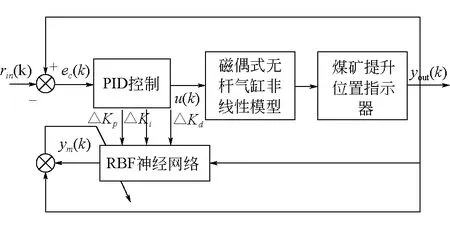
圖7 基于RBF優(yōu)化PID控制器的磁偶式無桿氣缸控制結(jié)系統(tǒng)構(gòu)
4.3 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的定位實(shí)驗(yàn)
構(gòu)建的RBF神經(jīng)網(wǎng)絡(luò)隱含層的節(jié)點(diǎn)數(shù)為6個(gè),設(shè)置好相關(guān)節(jié)點(diǎn)的參數(shù),給定一個(gè)目標(biāo)位置為58 mm的階躍信號(hào),其位置的控制效果如圖8所示。
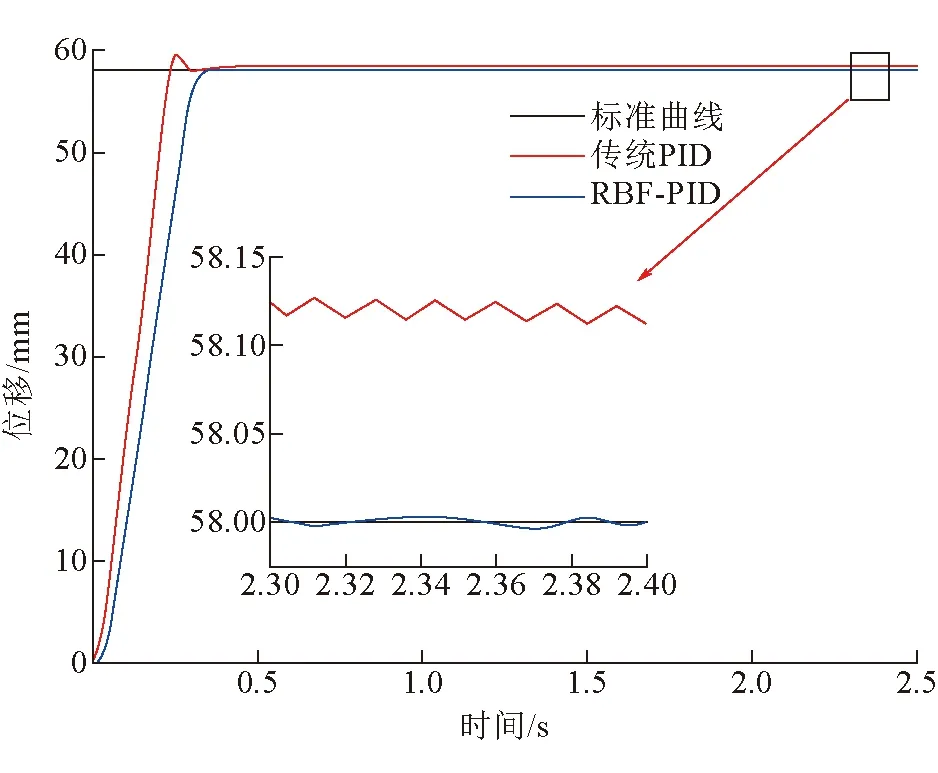
圖8 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID定位實(shí)驗(yàn)位移曲線
基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的定位實(shí)驗(yàn)的位置控制精度明顯優(yōu)于傳統(tǒng)PID定位實(shí)驗(yàn)的位置控制精度,如圖9所示。從圖9中的誤差曲線可以得出:傳統(tǒng)PID控制策略的位移誤差范圍為-0.129 0~-0.145 6 mm,基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的位移誤差范圍為-0.004 ~0.004 mm。
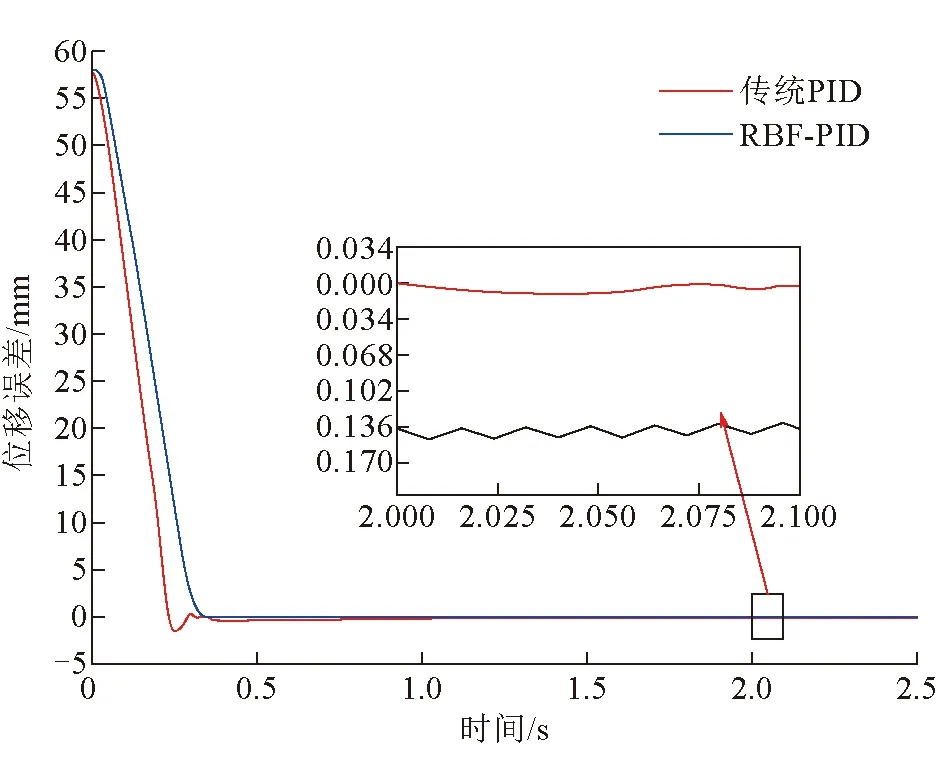
圖9 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID定位實(shí)驗(yàn)位移誤差曲線
基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID定位實(shí)驗(yàn)速度曲線如圖10所示。從圖10可以看出基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的定位實(shí)驗(yàn)的反應(yīng)速度稍慢于傳統(tǒng)PID控制策略。
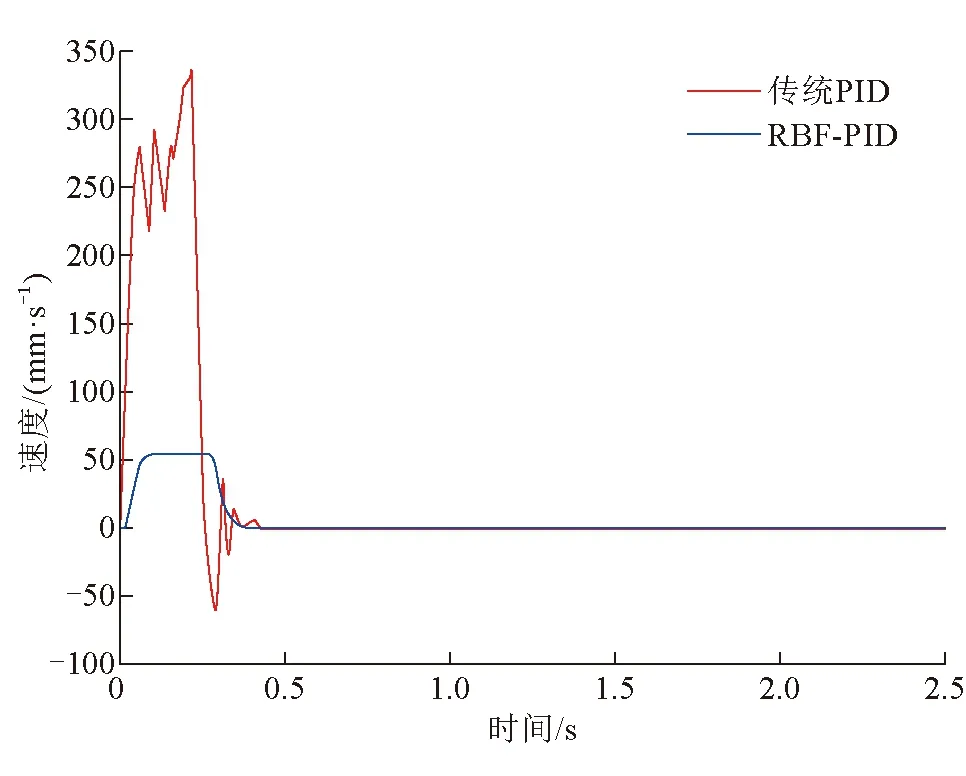
圖10 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID定位實(shí)驗(yàn)速度曲線
4.4 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的軌跡跟蹤實(shí)驗(yàn)
在MATLAB的算法仿真模型中,給定一個(gè)正弦信號(hào),初始位置是23.4 mm,頻率為2 rad/s,幅值是15.2 mm。設(shè)置好RBF神經(jīng)網(wǎng)絡(luò)的初始參數(shù),并對(duì)控制器的PID參數(shù)進(jìn)行優(yōu)化,其軌跡跟蹤效果如圖11所示。
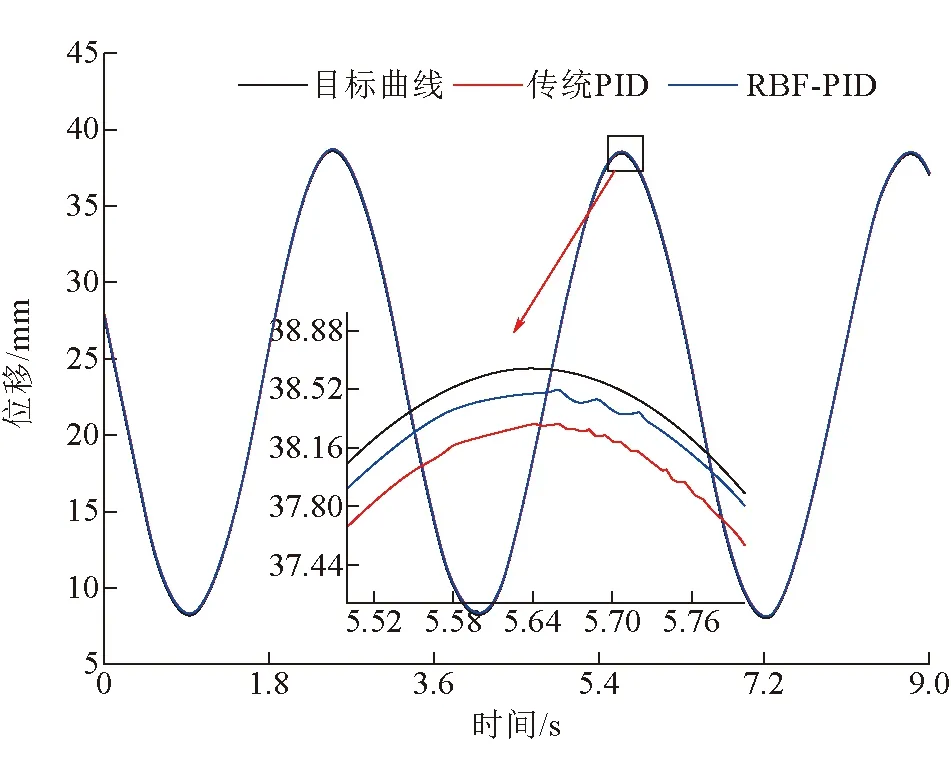
圖11 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID軌跡跟蹤位移曲線
基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID軌跡跟蹤位移誤差曲線如圖12所示。從圖12中的位移誤差曲線可以得出,傳統(tǒng)PID控制策略的位移誤差范圍是-0.427 ~ 0.545 mm,基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的位移誤差范圍是-0.361 ~0.249 mm,基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的軌跡跟蹤精度最高。基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID軌跡跟蹤速度曲線如圖13所示。從圖13中可以看出,基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID控制策略的速度波動(dòng)范圍優(yōu)于傳統(tǒng)PID控制策略。
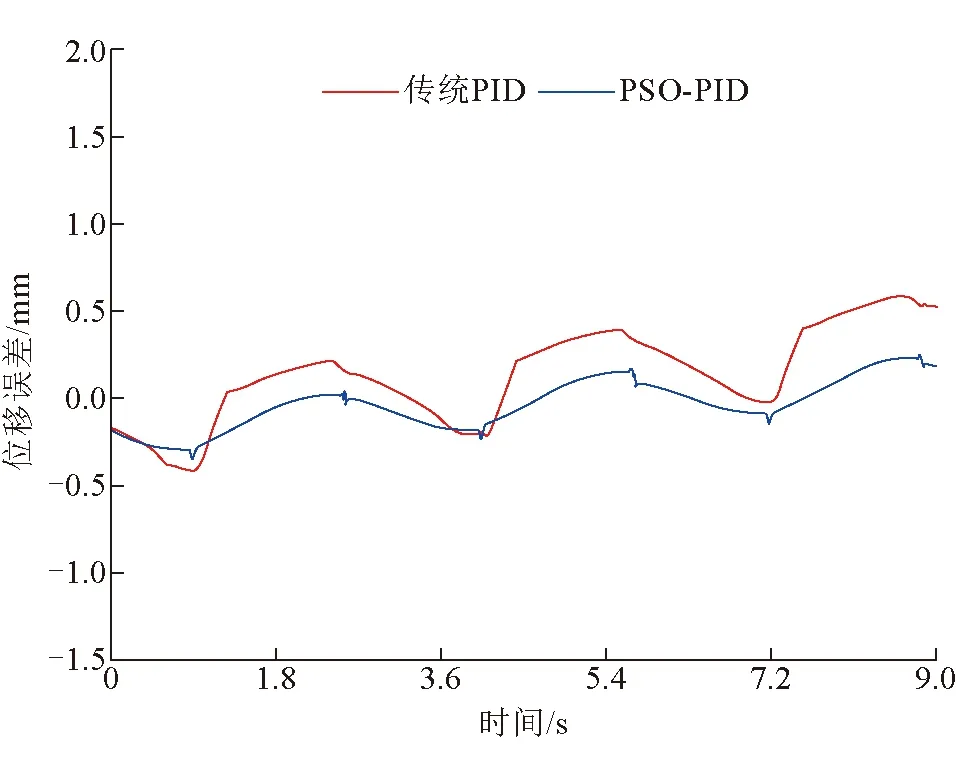
圖12 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID軌跡跟蹤位移誤差曲線
5 結(jié)論
針對(duì)煤礦安全生產(chǎn)中煤礦提升位置指示器等一些需要高精度位置控制的關(guān)鍵設(shè)備,設(shè)計(jì)研究了一套磁偶式無桿氣缸非線性位置伺服控制系統(tǒng)。通過分析影響非線性位置伺服控制系統(tǒng)位置精確控制的影響因素,解析閥控缸系統(tǒng)氣體的流動(dòng)原理。建立了氣動(dòng)系統(tǒng)的質(zhì)量流量方程、能量方程、壓力微方程和動(dòng)力學(xué)方程。然后將上述所有方程聯(lián)立,構(gòu)建成了磁偶式無桿氣缸非線性位置伺服控制系統(tǒng)的數(shù)學(xué)模型,接著驗(yàn)證了氣動(dòng)系統(tǒng)數(shù)學(xué)模型的正確性與有效性。最后,又設(shè)計(jì)了基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID的控制器,并與傳統(tǒng)PID控制結(jié)果進(jìn)行了對(duì)比。結(jié)果表明:基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID參數(shù)控制策略的位置控制精度較高,運(yùn)行的速度穩(wěn)定性較好,有效提高了煤礦安全生產(chǎn)中關(guān)鍵設(shè)備運(yùn)行的精確位置控制,增加了煤礦生產(chǎn)的安全性。
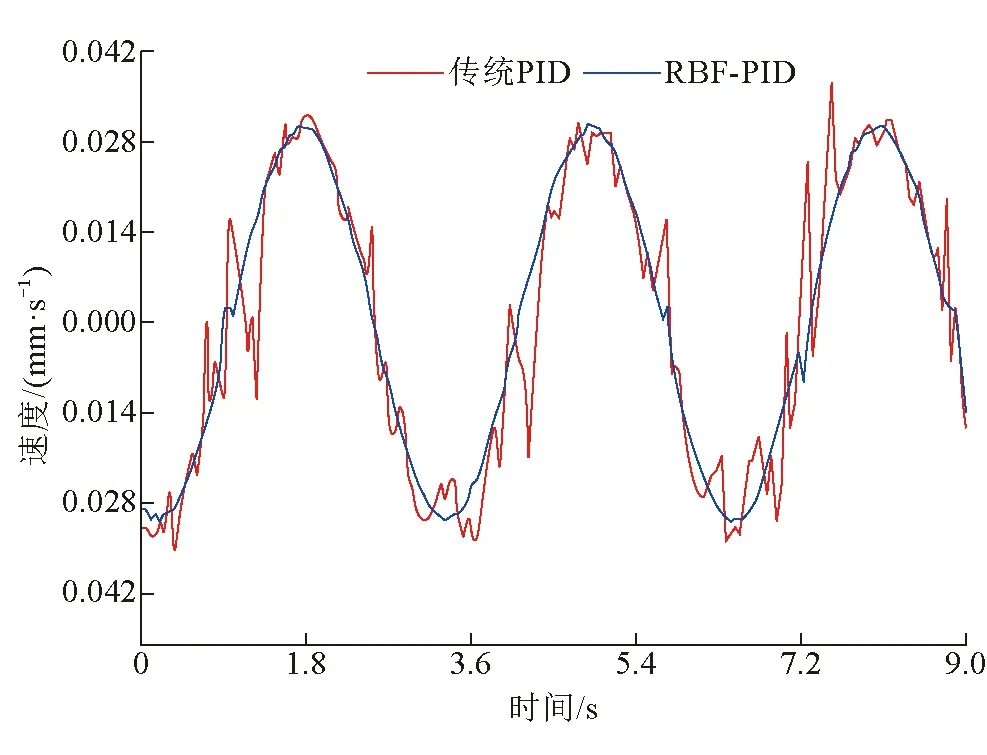
圖13 基于RBF神經(jīng)網(wǎng)絡(luò)優(yōu)化PID軌跡跟蹤速度曲線
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
能源工程(2020年6期)2021-01-26 00:55:22
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
山東冶金(2019年3期)2019-07-10 00:54:04
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52