基于改進深度殘差網絡的路面狀態分類
2022-10-31 11:32:14劉奧強張旭
農業裝備與車輛工程 2022年8期
劉奧強,張旭
(201620 上海市 上海工程技術大學 機械與汽車工程學院)
0 引言
近年來,自動駕駛技術成為圖像領域的研究熱點之一。自動駕駛技術在減少交通事故、減緩交通擁堵、降低能耗、保護環境等方面具有巨大潛能,較好的分類識別模型可有效提高安全駕駛水平。在實際的道路場景中,路面狀態可分為:干燥路面、結冰路面、潮濕路面、積雪路面、泥濘路面等,且路面狀態受天氣、光照變化、運動模糊等不利因素影響。傳統的圖像分類方法雖然能提取圖像特征對路面進行一定的分類識別,但提取的特征準確度不穩定,且路面分類識別適應性較差,因此路面狀態識別分類存在諸多待研究改進的方面。
20 世紀80 年代,多層神經網絡[1]這一概念被學者提出,LECUN[2-3]等人在文字識別中應用卷積神經網絡,減少了人工提取特征的工作量;KRIZHEVSKY[4-5]等人提出經典卷積神經網絡結構,并在圖像識別任務上取得重要突破。近年來,CNN(Convolutional Neural Network)在許多鄰域發展迅速,在處理圖像目標檢測[6]與分類等問題上表現優越。在路面狀態分類識別方面,文獻[7]提出一種經典的神經網絡結構,但網絡分類正確率較低;文獻[8]提出一種基于顏色空間特征的路面狀態識別方法;文獻[9]提出基于改進支持向量機識別路面狀態,在混合路況識別率達到85%,但樣本量少。
深度學習受到眾多研究者喜愛,其中一個關鍵因素是網絡模型的不斷改進和創新。神經網絡的改進會影響數據集特征提取的效果,因此,模型選擇是深度神經網絡中重要的組成部分。
深度殘差網絡塊的優化改進,既能顯著增強特征提取的多樣性,又能有效減低訓練誤差,因此本文在ResNet50 基礎上研究圖像分類識別,并進一步研究殘差塊對圖像分類準確率的影響,提出一種改進的深度殘差網絡模型,并在路面狀態數據集上進行實驗研究。實驗結果表明,改進后的深度殘差網絡提高了分類的準確度。
1 模型調整
在特定的任務中,選擇模型是不可忽視的重要環節,改變一些參數都可能對分類結果產生很大影響,所以本文以ResNet 為例研究模型調整的效果。
1.1 ResNet50 結構
ResNet 網絡作為圖像分類的主流模型,其作用被研究者認同,主要原因是其很深的層次結構于分類識別領域有很大作用。
從階段2 開始,每個階段從下采樣塊開始,然后是幾個剩余塊。在下采樣塊中,有2 個路徑。左邊路徑具有3 個卷積,其卷積大小分別為1×1,3×3 和1×1,這是一個完整的瓶頸結構;另一個路徑使用1×1 轉換,步長為2。可以對2 個路徑疊加求和,得到輸出。
ResNet網絡模型作為一個圖像分類大的框架,有很多變體,都是改變網絡模型的卷積層數,達到模型的深度結構,更深的模型有ResNet152 等。
1.2 ResNet50 結構調整
受ResNet 啟發,我們注意到下采樣塊的路徑B 中的1×1 卷積也忽略了3/4 的輸入特征映射,需要對其進行修改,便不會忽略任何信息。經驗發現,在卷積前增加一個2×2 的平均匯集層,步長為2,步長變為1 在實踐中效果很好,對計算成本的影響很小。圖1 說明了這一調整。

圖1 改進前后ResNet50 殘差塊結構Fig.1 Resnet50 residuals block structure before and after Improvement
2 實驗結果與分析
2.1 實驗平臺及數據集
本文是在Windows 10(x64)操作系統下進行仿真實驗,選擇的軟件平臺為MATLAB R2020b。在GeForce GTX 880M GPU 工作站上運行,結果證明對數據集的識別準確率較高。
本文道路狀態數據采用牛津機器人數據集[10]和KITTI 數據集[11],道路狀態分類如表1 所示。經過視頻圖像預處理后,每類樣本各有1 000 幅圖像,訓練數據800 幅,測試數據200 幅。實驗流程如圖2 所示。
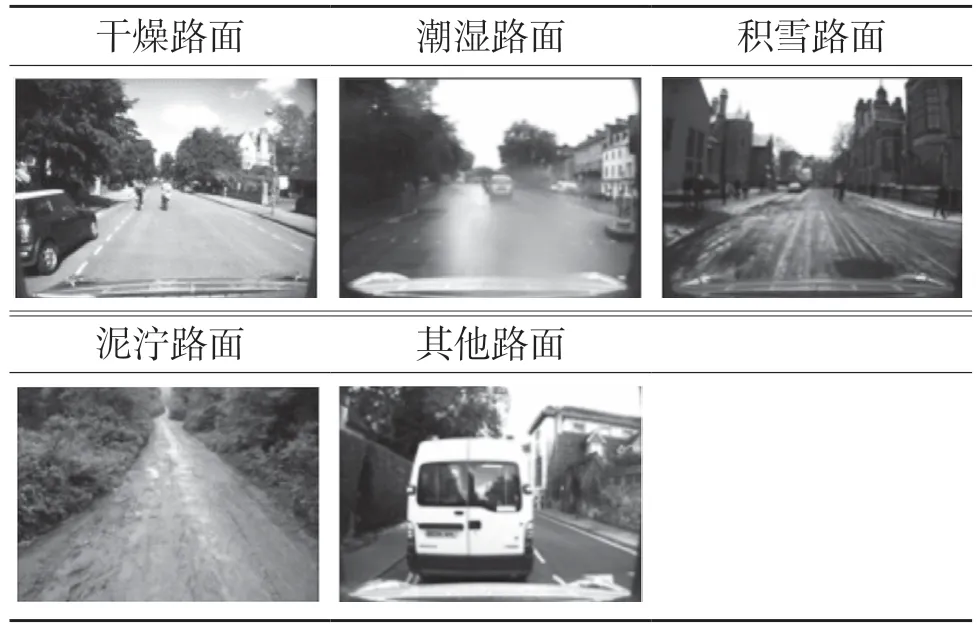
表1 道路狀態分類Tab.1 Road condition classification
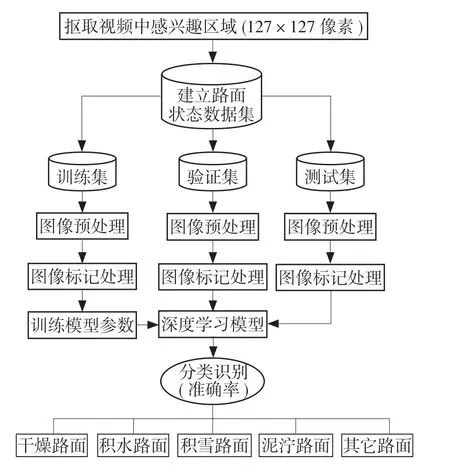
圖2 路面狀態分類識別流程圖Fig.2 Flow chart of pavement condition classification and identification
選擇圖片中間軸線作為中心基面,前方選擇相應的矩形像素點進行分類識別。建立路面數據集后,圖像數據預處理經過以下步驟:去除模糊圖像;應用同態濾波對圖片光照強度統一化處理[12];對路面狀態集中圖像標簽標定;最后將數據圖片放入深度學習模型中訓練識別。本文所采用的CNN 網絡結構示意圖如圖3 所示。

圖3 CNN 網絡結構示意圖Fig.3 Schematic diagram of CNN network structure
2.2 不同方法實驗對比分析
將本文的神經網絡與AlexNet,VGG16,ResNet50 這3 種網絡模型進行對比,并且加入SVM、BP 神經網絡2 個傳統機器學習模型分析結果進行比較。SVM 與BP 模型采用HVS 顏色空間特征和灰度共生矩陣特征,各模型實驗平均準確度分類結果如表2 所示。
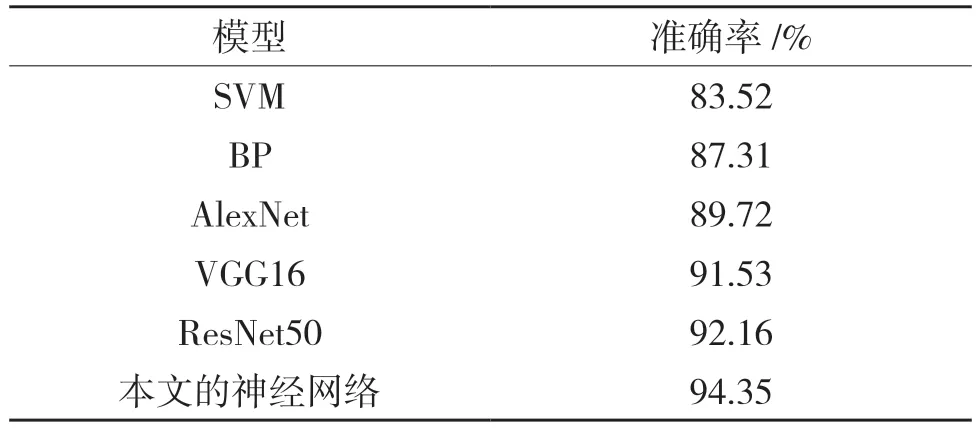
表2 準確率對比Tab.2 Comparison of accuracy
表2 展示了這6 種機器學習模型在路面狀態數據集中的分類識別結果。結果表明,改進的深度殘差網絡達到了很好的分類準確率。傳統的機器學習模型SVM 與BP 神經網絡對于干燥的路面狀況識別效果較差,主要原因是光照強度改變但沒設置合適的特征用于模型的訓練;SVM 模型適合小數據集(500 張圖片)的分類識別,故在該數據中訓練沒達到最好的性能,且反映出傳統的SVM 模型不適用于智能駕駛系統。本文在深度殘差網絡的基礎上進行了調整,增強了網絡對于路面狀態數據集的特征提取效果,從而驗證了本文提出的網絡模型應用于路面狀態分類識別的有效性。
3 結語
深度殘差網絡具有很強的分類學習能力,在解決圖像分類識別問題中具有優秀的性能。本文選用深度學習的方法,結合改進的深度殘差網絡和具有強大運算能力的GPU,對常見的5 類路面狀態進行分類識別。結果顯示:調整的深度殘差網絡具有較高的識別準確率,本文的數據集中平均識別準確率達到94.35%,且該網絡模型具有較好的推廣應用能力。實驗發現,提出改進殘差網絡結構的深度學習模型在參數和架構上仍然具有提升的空間,所以將來在提高識別準確率的圖像分析處理工作中,完善路面狀態數據集、改善網絡結構和參數是下一個研究目標。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
數學小靈通(1-2年級)(2021年4期)2021-06-09 06:25:56
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·七年級數學人教版(2019年4期)2019-05-20 10:06:32
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中學生數理化·七年級數學人教版(2018年6期)2018-06-26 08:36:06