基于ADAMS 的柔順停歇機(jī)構(gòu)動(dòng)力學(xué)仿真與分析
2022-11-01 02:46:26獨(dú)亞平趙春花郭嘉輝周川
農(nóng)業(yè)裝備與車輛工程 2022年9期
關(guān)鍵詞:變形
獨(dú)亞平,趙春花,郭嘉輝,周川
(201620 上海市 上海工程技術(shù)大學(xué) 機(jī)械與汽車工程學(xué)院)
0 引言
隨著柔順機(jī)構(gòu)[1]的興起,越來越多的研究者開始在剛性機(jī)構(gòu)的基礎(chǔ)上引入柔性桿或者柔性鉸鏈,以此來充分利用柔順機(jī)構(gòu)的優(yōu)點(diǎn)減少機(jī)構(gòu)的摩擦、磨損等,從而改善機(jī)構(gòu)的性能。柔順停歇機(jī)構(gòu)是部分柔順機(jī)構(gòu)的一種類型,主要是通過柔性桿的大變形來完成相關(guān)運(yùn)動(dòng)。該類機(jī)構(gòu)的從動(dòng)件在實(shí)際生產(chǎn)過程中主要做周期性、間歇性的運(yùn)動(dòng),以完成換位、進(jìn)給、計(jì)數(shù)、檢測(cè)等多種工藝規(guī)范的要求,被廣泛應(yīng)用于紡織、食品、印刷等輕工業(yè)[2]。由于剛性結(jié)構(gòu)實(shí)現(xiàn)停歇困難且昂貴,而且在運(yùn)動(dòng)過程中還會(huì)因?yàn)殚L時(shí)間相互摩擦受到累積的損傷,最終會(huì)使機(jī)構(gòu)發(fā)生疲勞失效,對(duì)機(jī)構(gòu)的性能產(chǎn)生影響,因此柔順停歇機(jī)構(gòu)的設(shè)計(jì)與研究逐漸成為重點(diǎn)[3-5]。對(duì)于平面連桿類停歇機(jī)構(gòu),剛性構(gòu)件實(shí)現(xiàn)停留一般需要6~8 桿,而柔順機(jī)構(gòu)只需5 桿,甚至更少,凸顯柔順停歇機(jī)構(gòu)的優(yōu)點(diǎn)。
隨著柔順停歇機(jī)構(gòu)越來越多投入使用,對(duì)該類機(jī)構(gòu)的性能要求也越來越高。相比傳統(tǒng)剛性停歇,柔順停歇機(jī)構(gòu)雖然有很多優(yōu)點(diǎn),但一些動(dòng)力學(xué)問題也不容忽視。柔性元件長時(shí)間承受周期性或非周期性載荷,會(huì)產(chǎn)生疲勞、應(yīng)力松弛和蠕變[6]等與動(dòng)力學(xué)密切相關(guān)的問題,雖然已經(jīng)有學(xué)者對(duì)柔順機(jī)構(gòu)進(jìn)行動(dòng)力學(xué)分析[7-9],但目前相關(guān)研究仍顯不足,如果可以深入進(jìn)行柔順停歇機(jī)構(gòu)動(dòng)力學(xué)分析,即可通過特性分析進(jìn)行相關(guān)參數(shù)優(yōu)化設(shè)計(jì),從動(dòng)力學(xué)的角度改善和提高柔順停歇機(jī)構(gòu)的工作性能。
本文以2 種柔順停歇機(jī)構(gòu)作為研究對(duì)象,通過ADAMS 建立剛?cè)狁詈夏P筒⑦M(jìn)行相關(guān)動(dòng)力學(xué)仿真分析,通過獲得運(yùn)動(dòng)位移以及速度相關(guān)曲線分析其停歇特性。
1 柔順停歇機(jī)構(gòu)1 動(dòng)力學(xué)分析
1.1 機(jī)構(gòu)1 簡圖
如圖1 所示為使用初始直鉸接-鉸接梁作為從動(dòng)件的柔順停歇機(jī)構(gòu)1。該機(jī)構(gòu)由剛性曲柄、兩端銷接的柔性長梁和柔性短梁、滑軌系統(tǒng)、可移動(dòng)塞子和DC 電機(jī)組成,主要通過利用銷-銷柔性梁的屈曲現(xiàn)象獲得停頓。工作原理是,當(dāng)曲柄剛開始旋轉(zhuǎn)時(shí),滑塊保持靜止。在旋轉(zhuǎn)過程中,曲柄旋轉(zhuǎn)壓縮柔性梁,當(dāng)連接器的水平分力低于柔性梁的臨界屈曲載荷時(shí),連接到柔性梁的滑塊不移動(dòng),產(chǎn)生精確的第1 次停頓。當(dāng)水平力達(dá)到柔性梁的臨界屈曲載荷時(shí),它會(huì)產(chǎn)生屈曲,為滑塊提供位移。當(dāng)曲柄繼續(xù)旋轉(zhuǎn)時(shí),會(huì)發(fā)生瞬間的第2 次停頓。
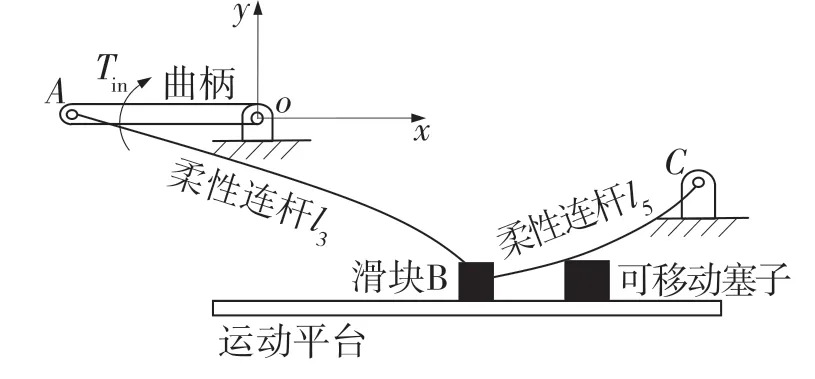
圖1 含初始直梁的柔順停歇機(jī)構(gòu)簡圖Fig.1 Compliant dwell mechanism with an initial straight beam
1.2 機(jī)構(gòu)1 剛?cè)狁詈夏P?/h3>
通過定義材料屬性和各零件之間的約束關(guān)系,建立了如圖2 所示的柔順機(jī)構(gòu)1 的虛擬樣機(jī)模型。建立好模型之后,定義每個(gè)鏈接之間的關(guān)節(jié),刪除不必要的零件,進(jìn)行運(yùn)動(dòng)分析。由于滑塊可以定義為2 個(gè)梁連接處的水平方向運(yùn)動(dòng),因此刪除了滑軌系統(tǒng)。施加驅(qū)動(dòng)3 rad/s,設(shè)定仿真時(shí)間為8 s,執(zhí)行步進(jìn)功能。

圖2 柔順停歇機(jī)構(gòu)1 剛?cè)狁詈夏P虵ig.2 Rigid-flexible coupling model of compliant dwell mechanism 1
1.3 ADAMS 仿真結(jié)果
在仿真的一個(gè)周期內(nèi),記錄了如圖3 所示的整個(gè)機(jī)構(gòu)運(yùn)動(dòng)中柔性梁的變化過程。可以看到,2 根柔性梁都經(jīng)歷了大變形。在t=0.5 s 時(shí)柔性長梁還沒有發(fā)生變形;繼續(xù)運(yùn)動(dòng)0.3 s 之后,長梁被壓縮,短梁被拉伸,均發(fā)生了變形,此后機(jī)構(gòu)繼續(xù)變形;達(dá)到1.5 s 時(shí),2 根梁達(dá)到了最大變形;曲柄繼續(xù)旋轉(zhuǎn),柔性長梁被釋放,短梁被拉伸,逐漸恢復(fù)到初始狀態(tài)。

圖3 機(jī)構(gòu)1 不同時(shí)刻的柔性梁變化示意圖Fig.3 Schematic diagram of flexible beam changes at different times
仿真結(jié)束后輸出柔性長桿末端點(diǎn)x方向的位移,即為該柔順停歇機(jī)構(gòu)滑塊的位移曲線、速度曲線,如圖4、圖5 所示。由圖4 可知,該機(jī)構(gòu)最初滑塊不會(huì)移動(dòng),然后到達(dá)柔性梁的屈曲載荷時(shí),滑塊會(huì)迅速達(dá)到位移最大值,在曲柄返回過程中,由于短梁的壓縮作用,滑塊暫時(shí)不會(huì)移動(dòng),因此出現(xiàn)長時(shí)間停留,約為整個(gè)周期的1/2。

圖4 機(jī)構(gòu)滑塊位移-時(shí)間響應(yīng)Fig.4 Mechanism slider displacement-time response

圖5 機(jī)構(gòu)滑塊速度-時(shí)間響應(yīng)Fig.5 Mechanism slider speed-time response
2 柔順停歇機(jī)構(gòu)2 動(dòng)力學(xué)分析
2.1 機(jī)構(gòu)2 簡圖
如圖6 所示,引入一種新的5 桿柔順近似駐留機(jī)構(gòu),柔順弧為從動(dòng)件。該機(jī)構(gòu)包括一個(gè)剛性曲柄,最初是直的柔順構(gòu)件3,一個(gè)剛性桿B,以及作為從動(dòng)件的固定端條件的半圓形柔性弧鏈接。該機(jī)構(gòu)的工作原理:當(dāng)曲柄轉(zhuǎn)動(dòng)時(shí),撓性聯(lián)軸器保持直線運(yùn)動(dòng)并推動(dòng)撓性圓弧,從而產(chǎn)生預(yù)彎曲變形。在達(dá)到柔性連桿3 臨界屈曲載荷之前其表現(xiàn)為剛體。直到此時(shí)只有彈性隨動(dòng)弧偏轉(zhuǎn)。在耦合器上達(dá)到臨界屈曲載荷后,梁屈曲并繼續(xù)偏轉(zhuǎn),隨動(dòng)弧上達(dá)到快速通過屈曲載荷時(shí),柔性梁推動(dòng)圓弧從軟化彈簧區(qū)到硬化彈簧區(qū)快速穿過。

圖6 具有屈曲的柔順停歇機(jī)構(gòu)簡圖Fig.6 Schematic diagram of a compliant dwell mechanism with a buckling
2.2 機(jī)構(gòu)2 剛?cè)狁詈夏P?/h3>
根據(jù)圖6 建立了如圖7 所示的剛?cè)狁詈夏P汀8鶕?jù)實(shí)際建立各部件之間的連接,施加驅(qū)動(dòng)角速度為3 rad/s,設(shè)置仿真時(shí)間為10 s、步長為50 進(jìn)行仿真。

圖7 柔順停歇機(jī)構(gòu)2 剛?cè)狁詈夏P虵ig.7 Rigid-flexible coupling model of compliant dwell mechanism 2
2.3 ADAMS 仿真結(jié)果
在仿真的一個(gè)周期內(nèi),記錄了如圖8 所示的整個(gè)機(jī)構(gòu)運(yùn)動(dòng)中柔性梁的變化過程。可以看到,兩根柔性梁都經(jīng)歷了大變形。在t=0.5 s 時(shí),柔性長梁達(dá)到最大變形,短梁被拉伸;繼續(xù)運(yùn)動(dòng)0.5 s 之后,長梁和短梁都被釋放。此后機(jī)構(gòu)繼續(xù)發(fā)生變形,短梁由向外拉伸變成反方向拉伸,并且變形越來越大,隨著曲柄的逐漸旋轉(zhuǎn),機(jī)構(gòu)恢復(fù)到初始狀態(tài)。

圖8 機(jī)構(gòu)2 不同時(shí)刻的柔性梁變化示意圖Fig.8 Schematic diagram of flexible beam changes at different moments of mechanism 2
仿真結(jié)束后,輸出柔性長桿3 末端點(diǎn)x方向的位移即為該柔順停歇機(jī)構(gòu)的位移曲線、速度曲線。圖9 可以看到,該機(jī)構(gòu)位移隨著曲柄的旋轉(zhuǎn)慢慢增大,在0.5 s 達(dá)到最大值,并存在一段停留;此后機(jī)構(gòu)位移慢慢向反方向運(yùn)動(dòng),在1.5 s 達(dá)到最小值,進(jìn)行周期性運(yùn)動(dòng)。圖10 為機(jī)構(gòu)對(duì)應(yīng)的速度-時(shí)間響應(yīng)曲線,與位移對(duì)應(yīng)也是周期性變化。

圖9 機(jī)構(gòu)滑塊位移-時(shí)間響應(yīng)Fig.9 Mechanism slider displacement-time response
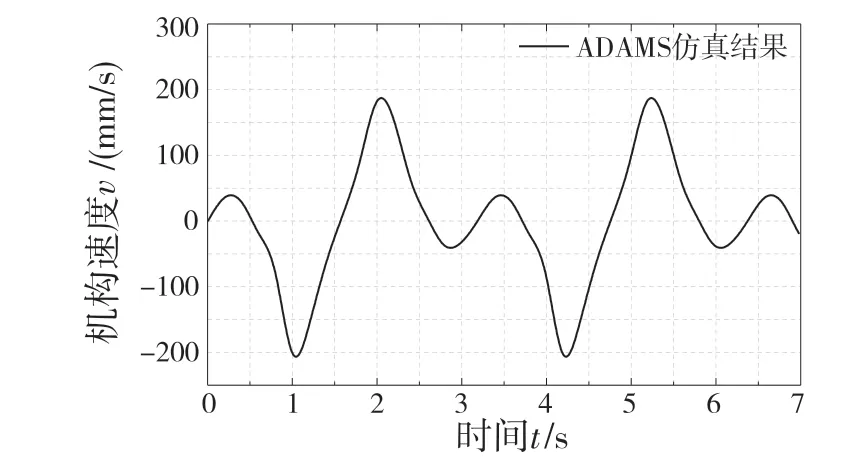
圖10 機(jī)構(gòu)滑塊速度-時(shí)間響應(yīng)Fig.10 Mechanism slider speed-time response
3 結(jié)論
(1)本文主要通過ADAMS 對(duì)2 種柔順停歇機(jī)構(gòu)進(jìn)行建模,并進(jìn)行相關(guān)動(dòng)力學(xué)分析,得到了2種機(jī)構(gòu)對(duì)應(yīng)的位移-時(shí)間、速度-時(shí)間響應(yīng)曲線。由分析結(jié)果可知,2 種機(jī)構(gòu)在運(yùn)動(dòng)中都存在停歇時(shí)間,并且都是周期性運(yùn)動(dòng)。
(2)由于機(jī)構(gòu)在運(yùn)動(dòng)中存在應(yīng)力應(yīng)變、蠕變等問題,可以在后續(xù)研究中繼續(xù)分析機(jī)構(gòu)的應(yīng)力及疲勞問題,從而發(fā)現(xiàn)提高機(jī)構(gòu)壽命的途徑。此外還可以以機(jī)構(gòu)停留時(shí)間為優(yōu)化目標(biāo),更改機(jī)構(gòu)尺寸改變機(jī)構(gòu)的停留時(shí)間,由此滿足不同應(yīng)用場(chǎng)合的機(jī)構(gòu)停歇要求。
猜你喜歡
智慧少年·故事叮當(dāng)(2020年10期)2020-11-06 06:19:00
中華詩詞(2020年1期)2020-09-21 09:24:52
河北理科教學(xué)研究(2020年1期)2020-07-24 08:14:34
作文成功之路·小學(xué)版(2020年11期)2020-02-01 06:26:58
作文周刊·小學(xué)二年級(jí)版(2018年29期)2018-11-26 11:20:28
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
童話世界(2018年14期)2018-05-29 00:48:08
數(shù)學(xué)小靈通·3-4年級(jí)(2017年10期)2017-11-08 08:42:59
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
