無人駕駛智能汽車路徑跟蹤算法與控制系統(tǒng)的研究
2022-11-03 07:52:02孫小亮
現(xiàn)代信息科技 2022年18期
孫小亮
(河南牧業(yè)經(jīng)濟(jì)學(xué)院,河南 鄭州 450046)
0 引言
在智能汽車駕駛的跟蹤與控制研究中,需要從汽車智能系統(tǒng)的路徑跟蹤、轉(zhuǎn)向控制、速度控制等方面著手,進(jìn)行高精確度汽車行駛規(guī)范的設(shè)計(jì)。本文基于智能汽車的傳感器、信息接收、底層控制等,進(jìn)行汽車自動(dòng)駕駛、速度控制、路徑規(guī)劃、緊急制動(dòng)的模塊分析,從而給出智能汽車在行駛過程中的多種參數(shù)控制模型,以保證車輛運(yùn)行的平穩(wěn)性與安全性。
1 發(fā)展現(xiàn)狀
20世紀(jì)80年代,我國啟動(dòng)關(guān)于智能汽車的研究項(xiàng)目,各個(gè)重點(diǎn)高校也針對無人駕駛汽車的自動(dòng)駕駛、轉(zhuǎn)向控制、路況信息感知等,制作出能夠自動(dòng)化控制的汽車。國防科技大學(xué)的智能汽車研究人員,主要通過對普通汽車進(jìn)行改造,進(jìn)行智能車輛的行駛路線控制、速度控制。我國國防科技大學(xué)設(shè)計(jì)的無人駕駛汽車,是具有三個(gè)輪子的后驅(qū)動(dòng)車,而前輪主要控制車輛的轉(zhuǎn)向。通過以上分析得出,智能汽車包含一系列的傳感器裝置、決策控制模塊等。這一國產(chǎn)三輪車也包含傳感器測距、自動(dòng)駕駛、路線導(dǎo)航與轉(zhuǎn)向控制等模塊,各模塊之間的協(xié)同配合,能夠?qū)崿F(xiàn)對周圍環(huán)境、道路的感知操作。而在2003、2011年,國防科技大學(xué)與一汽公司進(jìn)行聯(lián)合,研制出紅旗智能駕駛汽車,該無人駕駛智能汽車主要通過攝像頭、四線雷達(dá)等,進(jìn)行道路環(huán)境信息的感知,攝像頭能夠采集到車輛的行駛車道、周圍環(huán)境信息,幫助車輛完成轉(zhuǎn)向角度的控制。然后可以運(yùn)用GPS 導(dǎo)航功能來獲取汽車的位置信息,并對行車路線進(jìn)行規(guī)劃,智能汽車的最高時(shí)速在140 km/h 左右。而且在行車過程中,車輛里程測量設(shè)備,可以實(shí)現(xiàn)對智能車行駛車速、里程等的測算與控制。
2 無人駕駛智能汽車的結(jié)構(gòu)與關(guān)鍵技術(shù)分析
2.1 智能汽車車體的結(jié)構(gòu)設(shè)計(jì)
在智能汽車車體的設(shè)計(jì)過程中,主要包括汽車動(dòng)力系統(tǒng)、信息感知系統(tǒng)、無線通信系統(tǒng)與控制系統(tǒng)等部分內(nèi)容。其中在動(dòng)力系統(tǒng)方面,智能汽車與傳統(tǒng)汽車不存在較大差異,電動(dòng)汽車通常由多個(gè)串聯(lián)的鉛酸蓄電池(標(biāo)壓12 V、總壓240 V),來提供智能汽車行駛的基本動(dòng)力。然后智能汽車車體中還裝有激光雷達(dá)、GPS 定位系統(tǒng)、攝像頭、里程計(jì),以及為各種傳感設(shè)備、智能控制設(shè)備提供網(wǎng)絡(luò)的通信系統(tǒng)。本文主要對以上智能汽車的結(jié)構(gòu)進(jìn)行介紹。
2.1.1 激光雷達(dá)
激光雷達(dá)是智能汽車中最重要的傳感器之一,其主要負(fù)責(zé)車身、道路之間的障礙識別,屬于周邊環(huán)境監(jiān)測設(shè)備。我國現(xiàn)階段智能汽車的障礙監(jiān)測,通常將單線、四線激光雷達(dá)進(jìn)行結(jié)合來使用。智能汽車行駛過程中,激光雷達(dá)主動(dòng)發(fā)射用于距離測量的激光,激光碰到障礙物時(shí),會(huì)返回到雷達(dá)檢測的設(shè)備,從而計(jì)算出智能汽車、障礙物之間的距離。激光雷達(dá)對于道路信息的采集,受到外部不穩(wěn)定因素的干擾較小,在距離測量中的精確度較高。特別是對那些道路標(biāo)志模糊、路面凹凸不平的地區(qū),激光雷達(dá)的環(huán)境信息感知效果更好。
2.1.2 GPS 智能定位
GPS 全球定位系統(tǒng)作為最智能的導(dǎo)航系統(tǒng),被廣泛應(yīng)用到普通汽車、智能汽車的導(dǎo)航與定位中。本文所研究的智能汽車,主要使用NovAtel 公司的慣性導(dǎo)航技術(shù)、垂直陀螺儀等,進(jìn)行實(shí)時(shí)路況數(shù)據(jù)信息的采樣和接收,一方面確定汽車當(dāng)下所處的位置,另一方面幫助控制系統(tǒng)完成下一步的駕駛決策。慣性導(dǎo)航技術(shù)利用牛頓第二定律,測量汽車行駛過程中的慣性加速度,并進(jìn)行慣性加速度的積分運(yùn)算,以求得汽車行駛的轉(zhuǎn)向角度、側(cè)傾角度。
2.1.3 前后行車攝像頭
攝像頭也是智能汽車的路況傳感器之一,其能夠完成周圍道路、障礙物等的檢測。智能汽車包括前攝像頭、后攝像頭等組成部分,在捕獲到車道中的障礙信息后,會(huì)將數(shù)據(jù)傳輸?shù)娇刂葡到y(tǒng)的上位機(jī),由上位機(jī)下發(fā)后續(xù)的操控命令。現(xiàn)階段使用的攝像頭一般為鏡王攝像頭,其分辨率通常為1280×720、640×480,能滿足智能汽車的日常需求。
2.1.4 網(wǎng)絡(luò)串口通信系統(tǒng)
在智能汽車的網(wǎng)絡(luò)通信中,通常使用德國BOSCH 公司開發(fā)的CAN 總線協(xié)議,作為國際智能汽車通信傳輸?shù)闹饕獏f(xié)議。CAN 是用于汽車控制系統(tǒng)的局域網(wǎng)絡(luò),其能夠?qū)⑺鸭c處理后的雷達(dá)數(shù)據(jù)、導(dǎo)航數(shù)據(jù)、攝像數(shù)據(jù)等進(jìn)行整合,并通過局域網(wǎng)來完成汽車數(shù)據(jù)信息的大范圍、快速傳播。當(dāng)前智能汽車主要借助于計(jì)算機(jī)上的RS232 串口,進(jìn)行各種字節(jié)數(shù)據(jù)的通信傳輸,CAN 控制器局域網(wǎng)絡(luò)在數(shù)據(jù)傳輸過程中,具有準(zhǔn)確度高、速度快、資源占用少等優(yōu)勢。
2.2 無人駕駛智能汽車的關(guān)鍵技術(shù)分析
2.2.1 行車環(huán)境感知技術(shù)
無人駕駛智能汽車的傳感器設(shè)備,構(gòu)成具有環(huán)境感知功能的綜合系統(tǒng)。在這一系統(tǒng)中,包括激光雷達(dá)、GPS 智能定位、攝像頭、里程計(jì)等軟硬件。行車環(huán)境感知技術(shù)作為外部信息采集、汽車狀態(tài)調(diào)整的技術(shù),其能夠完成道路車況、道路標(biāo)準(zhǔn)線、周圍障礙等的測量。同時(shí)智能汽車的環(huán)境感知系統(tǒng),還可以對車輛自身狀況信息進(jìn)行檢測與分析,包括行駛里程、汽車位置、車輪偏轉(zhuǎn)角度、行駛速度等。通過慣性導(dǎo)航、信息傳感器等設(shè)備的信息獲取,可以得到較為可靠的行車數(shù)據(jù),以保證復(fù)雜路況下的行車安全。
2.2.2 路線規(guī)劃與決策技術(shù)
智能汽車的路線規(guī)劃與決策層,主要分為路徑規(guī)劃、信息決策兩方面內(nèi)容。通過以上環(huán)境感知技術(shù)所獲得的數(shù)據(jù)信息,智能規(guī)劃系統(tǒng)可以對外部環(huán)境數(shù)據(jù)、車輛行駛數(shù)據(jù)等進(jìn)行分析,在經(jīng)過數(shù)據(jù)信息評估與運(yùn)算后,其能夠設(shè)計(jì)出最適合當(dāng)下路況的行駛路徑。對于智能車輛運(yùn)行過程中的路徑規(guī)劃,通常包含局部路徑規(guī)劃、全局路徑規(guī)劃兩方面內(nèi)容。相比于全局路徑規(guī)劃,局部路徑規(guī)劃的車況分析會(huì)更加詳細(xì),其會(huì)根據(jù)周圍道路環(huán)境、汽車位置、局部車況、車輛行駛速度等因素,做出綜合的路線決策。而在智能汽車行駛的路線決策完成后,決策模塊就會(huì)對控制系統(tǒng)下達(dá)相應(yīng)的操作指令,以實(shí)現(xiàn)對車體的智能操控。
2.2.3 控制系統(tǒng)
控制系統(tǒng)包括橫向控制系統(tǒng)、縱向控制系統(tǒng),主要對智能汽車的轉(zhuǎn)向、行駛速度、加速度等進(jìn)行控制。橫向控制系統(tǒng)接收到外部環(huán)境、行駛路徑的規(guī)劃信息后,會(huì)控制車輛處于某一車道內(nèi)行駛,并躲避來自周圍的道路障礙。縱向控制系統(tǒng)則著重于汽車制動(dòng)、速度等的控制,通常利用PID 控制算法或神經(jīng)網(wǎng)絡(luò)算法,進(jìn)行智能汽車行駛速度的控制。
3 無人駕駛智能汽車轉(zhuǎn)向與車速控制系統(tǒng)的設(shè)計(jì)研究
3.1 智能汽車轉(zhuǎn)向控制系統(tǒng)的設(shè)計(jì)
在智能車輛的自動(dòng)轉(zhuǎn)向過程中,需要助力轉(zhuǎn)向控制系統(tǒng),來對汽車的方向盤、行駛方向進(jìn)行控制。現(xiàn)階段常見的汽車助力轉(zhuǎn)向系統(tǒng),主要包括機(jī)械液壓助力、電子液壓助力、電動(dòng)助力等,智能汽車使用電動(dòng)助力進(jìn)行轉(zhuǎn)向控制。電動(dòng)助力轉(zhuǎn)向控制系統(tǒng),包括扭矩傳感器、減速機(jī)構(gòu)、助力電機(jī)、電子控制單元ECU、機(jī)械轉(zhuǎn)向器等部分。在使用電動(dòng)助力進(jìn)行轉(zhuǎn)向控制過程中,電子控制單元ECU 負(fù)責(zé)整個(gè)系統(tǒng)的電路控制。只要車輛方向盤發(fā)生轉(zhuǎn)動(dòng),扭矩傳感器就會(huì)向電子控制單元ECU 發(fā)送信號。之后電子控制單元ECU 也會(huì)發(fā)送離合控制信號,來控制助力電機(jī)的工作狀態(tài),助力電機(jī)又會(huì)向電磁離合器、減速機(jī)構(gòu)發(fā)送控制指令,以保證汽車正常的轉(zhuǎn)向操作。電動(dòng)助力轉(zhuǎn)向控制系統(tǒng)的實(shí)現(xiàn)流程如圖1所示。

圖1 電動(dòng)助力轉(zhuǎn)向控制系統(tǒng)的實(shí)現(xiàn)
3.2 無人駕駛智能汽車車速控制系統(tǒng)的設(shè)計(jì)
3.2.1 智能汽車車速底層控制系統(tǒng)的設(shè)計(jì)
無人駕駛智能汽車的速度控制,分為縱向控制、橫向控制兩方面內(nèi)容。縱向控制是智能汽車速度的上層控制,也包含智能汽車速度的底層控制。底層控制在智能汽車速度控制中的功能,是取代駕駛員對汽車的操作,對汽車中的剎車制動(dòng)系統(tǒng)、油門等進(jìn)行控制。底層控制主要借助于驅(qū)動(dòng)器,向牽引電機(jī)發(fā)送相應(yīng)的控制指令,進(jìn)行制動(dòng)器、油門踏板等的控制。在智能車速底層控制系統(tǒng)的設(shè)計(jì)過程中,油門踏板、牽引電機(jī)、油門控制器等設(shè)備,通常由多個(gè)鋼絲繩進(jìn)行連接。在牽引電機(jī)發(fā)生轉(zhuǎn)動(dòng)的情況下,鋼絲繩會(huì)引發(fā)剎車制動(dòng)器、油門踏板的動(dòng)作。底層控制系統(tǒng)中存在光電轉(zhuǎn)換器,其能夠?qū)⑤敵鲚S上的機(jī)械幾何位移量,轉(zhuǎn)換成脈沖或數(shù)字量,以實(shí)現(xiàn)對牽引電機(jī)位置的調(diào)試,從而完成對車輛剎車、速度的控制,具體如圖2所示。
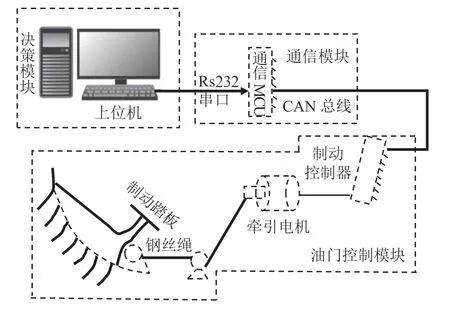
圖2 智能汽車車速底層控制系統(tǒng)
3.2.2 智能汽車車速上層控制系統(tǒng)的設(shè)計(jì)
智能汽車上層車速控制系統(tǒng),是將汽車剎車制動(dòng)裝置、油門踏板作為單獨(dú)的控制系統(tǒng),對其進(jìn)行分別控制。但在智能汽車行駛的過程中,為減少車身的機(jī)械損耗、電量損耗,需要盡可能避免剎車制動(dòng)、油門踏板系統(tǒng)之間的快速切換。上層車速控制系統(tǒng)對油門、剎車制動(dòng)的交替控制,需要根據(jù)當(dāng)下汽車速度、加速度,以及其與期望速度的偏差,向底層控制系統(tǒng)發(fā)送相應(yīng)的控制指令。然后底層控制系統(tǒng)會(huì)對EPOS2 電機(jī)控制器,發(fā)送相應(yīng)的油門控制指令,EPOS2 電機(jī)控制器進(jìn)行油門踏板開啟、關(guān)閉的角度調(diào)節(jié),從而完成對汽車的加速操作。
根據(jù)以上油門、剎車制動(dòng)裝置的交替控制規(guī)律,進(jìn)行上層車速控制系統(tǒng)的切換規(guī)則制定。在對智能汽車行駛的速度偏差、速度穩(wěn)定性進(jìn)行綜合考慮后,上層控制系統(tǒng)應(yīng)對油門踏板的開度進(jìn)行調(diào)整。智能汽車實(shí)際速度、期望速度的偏差小于0 的情況下,應(yīng)對剎車、油門踏板進(jìn)行減速操作。而在智能汽車實(shí)際速度、期望速度的偏差大于某一閾值的情況下,上位機(jī)要向EPOS2 電機(jī)控制器發(fā)送釋放信號,對油門踏板進(jìn)行釋放操作,通過剎車制動(dòng)的調(diào)節(jié)來完成車輛減速。切換規(guī)則公式為:
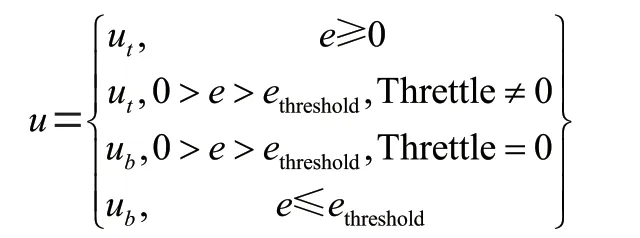
其中:u為剎車制動(dòng)控制數(shù)值;u為油門控制數(shù)值;為某一閾值,在≥0 的情況下,上層控制系統(tǒng)會(huì)對汽車進(jìn)行剎車制動(dòng)控制;在<0、>、Throttle ≠0 的情況下,上層控制系統(tǒng)會(huì)對油門踏板的啟閉角度進(jìn)行調(diào)節(jié);在<0、>、Throttle=0,以及≤的情況下,上層控制系統(tǒng)會(huì)對汽車進(jìn)行剎車制動(dòng)控制。
4 無人駕駛智能汽車路徑跟蹤算法的設(shè)計(jì)研究
智能汽車路徑跟蹤系統(tǒng)設(shè)計(jì)的主要目的,是通過Pure Pursuit 算法、改進(jìn)Pure Pursuit 算法的運(yùn)用,進(jìn)行車輛行駛路線、道路轉(zhuǎn)向等的控制。路徑跟蹤控制系統(tǒng)存在預(yù)先規(guī)劃好的路徑,在車輛行駛路徑的跟蹤過程中,也存在智能汽車轉(zhuǎn)向的期望轉(zhuǎn)角。但智能汽車在具體的行進(jìn)中,總會(huì)出現(xiàn)實(shí)際路徑、規(guī)劃路徑之間的偏差問題,這也會(huì)導(dǎo)致汽車位置、車體航向角的偏差。因此需要通過智能汽車控制算法、Pure Pur-suit 算法等,對其行駛路徑、轉(zhuǎn)向偏角等進(jìn)行跟蹤與修正。
4.1 Pure Pursuit 跟蹤算法
Pure Pursuit 車輛路徑跟蹤算法,主要通過預(yù)先規(guī)劃路徑、行駛距離路徑之間的偏差計(jì)算,進(jìn)行汽車位置、轉(zhuǎn)向偏角的數(shù)據(jù)測算,從而完成對某一智能汽車的路徑跟蹤。Pure Pursuit 路徑跟蹤算法具有實(shí)現(xiàn)簡單、數(shù)據(jù)計(jì)算直觀等特征,在智能車輛路徑跟蹤方面有著良好的魯棒性。Pure Pursuit 路徑跟蹤算法會(huì)將行駛車輛,與車輛后輪驅(qū)動(dòng)軸線進(jìn)行連接,以形成具有一定曲率的圓弧,具體連接情況如圖3所示。
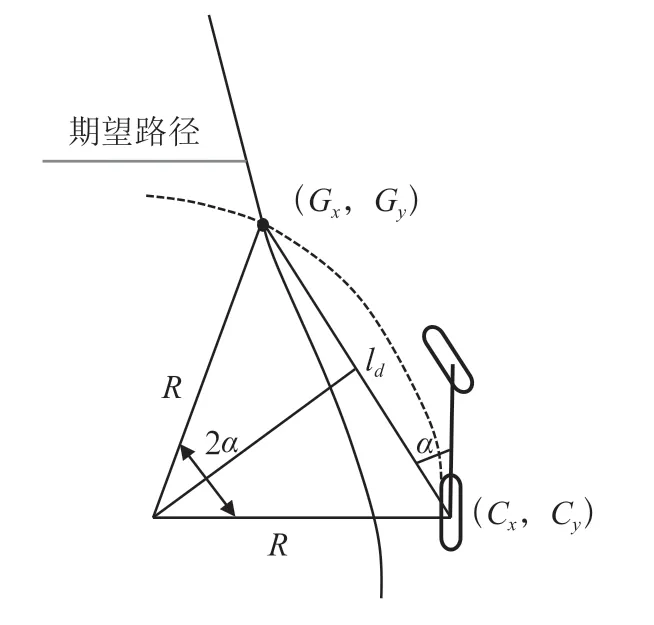
圖3 Pure Pursuit 路徑跟蹤算法
從圖中可以得出,(G,G)是行駛車輛的目標(biāo)點(diǎn),(C,C)是智能車輛后輪驅(qū)動(dòng),ld 表示智能汽車目標(biāo)點(diǎn)、后軸之間的距離,是智能汽車前進(jìn)向量、預(yù)瞄向量之間的夾角,其路徑跟蹤的實(shí)現(xiàn)公式為:


4.2 基于改進(jìn)Pure Pursuit 算法的路徑跟蹤

5 結(jié)論
智能汽車集合機(jī)械制造、計(jì)算機(jī)信息控制等技術(shù),是國家經(jīng)濟(jì)與科技實(shí)力的主要體現(xiàn)。我國在無人駕駛智能汽車的研究中,主要借鑒、歐美日本的智能車輛控制系統(tǒng),來完成汽車的路況信息搜集、路徑行駛規(guī)劃與駕駛速度控制。因此通過以上分析可得出,測距雷達(dá)、數(shù)據(jù)鏈路天性、攝像頭、GPS 接收器等傳感器裝置,以及規(guī)劃決策計(jì)算機(jī)、數(shù)據(jù)鏈路控制器、底層控制模塊等的配合,能夠?qū)崿F(xiàn)智能汽車的路線跟蹤、控制決策,并完成智能汽車行駛過程中的自動(dòng)控制。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
兒童時(shí)代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年17期)2017-09-08 13:08:58
作文大王·低年級(2016年4期)2016-04-18 00:24:37
- 現(xiàn)代信息科技的其它文章
- Matlab應(yīng)用于“信號與系統(tǒng)”課程教學(xué)探索與實(shí)踐
- 開放式實(shí)驗(yàn)在“核工程虛擬仿真實(shí)驗(yàn)”課程教學(xué)中的應(yīng)用初探
- 基于Access數(shù)據(jù)庫技術(shù)的案例庫系統(tǒng)的設(shè)計(jì)與開發(fā)
- 基于GNS3+Wireshark的網(wǎng)絡(luò)協(xié)議分析實(shí)驗(yàn)教學(xué)改革
- “OBE”理念下工科課程逆向教學(xué)設(shè)計(jì)及其效果定性研究
——以數(shù)字圖像處理為例 - 高職院校“PHP動(dòng)態(tài)網(wǎng)站開發(fā)”課程教學(xué)改革探索