基于神經(jīng)網(wǎng)絡(luò)的室內(nèi)單站精確被動定位技術(shù)研究
2022-11-06 06:30:52張倩倩尹成友李安琪
電波科學(xué)學(xué)報 2022年4期
張倩倩 尹成友 李安琪
(國防科技大學(xué)電子對抗學(xué)院,合肥 230037)
引 言
隨著社會科技進(jìn)步的不斷發(fā)展,位置服務(wù)在人們生活中已經(jīng)不可或缺.當(dāng)前,室外定位的技術(shù)已趨于成熟,利用北斗系統(tǒng)、全球定位系統(tǒng)等就能夠基本滿足人們戶外活動的需求.室內(nèi)定位是近年來的研究熱點,由于室內(nèi)環(huán)境的復(fù)雜性以及多徑效應(yīng)的影響,信號的傳輸會受到一定的影響.復(fù)雜的傳輸信道會對信號造成反射、散射以及折射等,很多室外定位方法在室內(nèi)環(huán)境下的定位效果并不理想.
室內(nèi)定位系統(tǒng)可以分為兩大類:一是傳統(tǒng)的定位方法,不利用復(fù)雜多信道信息,依靠測量到達(dá)時間、到達(dá)時差、往返時間和到達(dá)角等參數(shù)來估算目標(biāo)位置;二是利用復(fù)雜多信道信息的定位方法,將每個位置用唯一的信道指紋表示,室內(nèi)定位系統(tǒng)從測量參數(shù)中提取特征,通過對多信道傳遞特征的分析,從而實現(xiàn)對目標(biāo)的定位.
超寬帶(ultra wide-band,UWB)系統(tǒng)具有提供高精度定位的能力,Segura 等人[1]提出了一種新型的UWB 室內(nèi)定位系統(tǒng),綜合信號到達(dá)時間和測距估計方法,95%的位置測量結(jié)果誤差在20 cm 以下,能夠?qū)崿F(xiàn)在室內(nèi)環(huán)境下對移動機(jī)器人的精確定位,但在非視距環(huán)境下準(zhǔn)確度不夠.文獻(xiàn)[2]針對這種問題,基于樸素貝葉斯原理,對兩種場景進(jìn)行精確識別,從而提高了非視距環(huán)境下的整體定位精度.但現(xiàn)實生活中,由于室內(nèi)環(huán)境的復(fù)雜性,如目標(biāo)的移動、信號衰減和多徑傳播等,UWB 定位技術(shù)仍面臨著重大挑戰(zhàn).
在復(fù)雜場景下,傳統(tǒng)定位方法往往受限于室內(nèi)多徑效應(yīng),難以從接收信號中提取目標(biāo)位置的有效信息,而基于復(fù)雜多信道信息的定位方法,通過合理利用這些信息,可以提升定位效果,實現(xiàn)對目標(biāo)的精確定位.
時間反演[3-4]是一種典型的利用復(fù)雜信道信息的定位方法.Hoefer 等人[3]通過數(shù)值實驗,利用時間反演腔模型和時空離散傳輸線矩陣方法,重建空間中多個脈沖源,實現(xiàn)了對目標(biāo)的超分辨定位.文獻(xiàn)[4]通過在目標(biāo)輻射源近場放置散射介質(zhì)薄片,當(dāng)時間反演與散射介質(zhì)相結(jié)合時,能夠提高對目標(biāo)輻射源的定位精度,以網(wǎng)格分辨率重建脈沖點源的位置和幅度.時間反演方法定位精度較高,但主要用于目標(biāo)對外輻射信號的情況,是對輻射源自身的定位.
利用接收信號強(qiáng)度(received signal strength,RSS)和信道狀態(tài)信息(channel state information,CSI)的指紋定位技術(shù)是另一種典型的利用信道信息的定位方法.劉召偉等人[5]依據(jù)差分-距離損耗模型,利用RSS 估計距離,由已知距離下的差分接收功率值擬合得到模型參數(shù),用最大似然法估計用戶位置.李若南等人[6]為了降低室內(nèi)復(fù)雜信道對接收信號強(qiáng)度的干擾影響,提出通過注意力機(jī)制捕獲RSS 序列與區(qū)域位置粗細(xì)粒度特征的映射關(guān)系,進(jìn)而獲取區(qū)域位置信息,實現(xiàn)了不同大小網(wǎng)格采集下對目標(biāo)的高精度定位.但RSS 是粗粒度信息,常常受到多徑效應(yīng)及噪聲信號的影響,因此CSI 指紋定位技術(shù)更受青睞.Kaishun Wu 等人[7–9]通過研究正交頻分復(fù)用(orthogonal frequency division multiplexing,OFDM)系統(tǒng)中子載波的頻率分集,提出了一種利用CSI 在接收機(jī)上建立傳播模型和指紋識別系統(tǒng)的方法[9],利用OFDM中的信道狀態(tài)信息建立傳播模型,將其與頻率分集結(jié)合、多天線與空間分集結(jié)合用于室內(nèi)位置指紋識別.在幾個典型室內(nèi)環(huán)境下開展實驗,能夠明顯提高定位精度.在此之后,Wang 等人利用深度學(xué)習(xí)的方法,分別提出了Phase-Fi[10]和Deep-Fi[11]兩種定位系統(tǒng).Phase-Fi 系統(tǒng)提取CSI 相位信息,利用網(wǎng)絡(luò)權(quán)值表示位置指紋,在實際室內(nèi)環(huán)境中實驗,能夠?qū)崿F(xiàn)客廳1.03 m 和實驗室1.98 m 的平均定位精度. Deep-Fi 系統(tǒng)也能在不同實驗情況下實現(xiàn)米級定位精度.文獻(xiàn)[12]提出一種基于卷積神經(jīng)網(wǎng)絡(luò)(convolutional neural network,CNN)的定位方法,該方法利用不同信道的CSI 振幅和相位差構(gòu)造位置指紋,與Phase-Fi 系統(tǒng)相比,定位精度提高了57.64%.但基于CSI 定位的前提條件是該區(qū)域無線基礎(chǔ)設(shè)施較為完善,能夠?qū)崿F(xiàn)Wi-Fi 信號的全覆蓋,但在部分場景中難以具備這樣的條件,難以實現(xiàn)對目標(biāo)的精確定位.
在上述的定位方法中,主動定位方法通常需要在空間中布設(shè)多個接收傳感器,一般用于目標(biāo)自身對外輻射信號的情況,難以實現(xiàn)單發(fā)單收情況下對目標(biāo)的定位.而在被動定位情況下,對目標(biāo)的定位精度通常只能達(dá)到米級,無法實現(xiàn)超分辨定位.因此,如何在室內(nèi)復(fù)雜電波傳播環(huán)境下,利用單接收站實現(xiàn)對目標(biāo)的超分辨被動定位,仍然有很多問題亟待解決.
本文基于多徑復(fù)雜信道的室內(nèi)定位理論,將復(fù)雜室內(nèi)環(huán)境視為二維的時間反演腔模型,利用不規(guī)則的墻壁增強(qiáng)目標(biāo)與復(fù)雜場景中的障礙物的相互作用,進(jìn)一步增強(qiáng)多徑效應(yīng),從而接收的電磁波中也包含了更加豐富的目標(biāo)信息,最終能夠?qū)崿F(xiàn)復(fù)雜室內(nèi)環(huán)境下對目標(biāo)的單站精確定位,為室內(nèi)定位提供了一種新的方法.
1 基于多徑復(fù)雜信道的室內(nèi)定位原理
假設(shè)我們考慮圖1 所示的室內(nèi)定位問題.有一個輻射源位于A(rt)點,有一個接收傳感器位于B(rr)點,有一個目標(biāo)位于C(r0)點.A點輻射源輻射的信號在室內(nèi)空間傳播,照射到C點目標(biāo),產(chǎn)生散射信號,該信號經(jīng)過多徑傳輸?shù)竭_(dá)B點接收點.現(xiàn)在的目的是利用B點的單站接收信號對C點目標(biāo)進(jìn)行定位.

圖1 室內(nèi)環(huán)境示意圖Fig.1 Schematic diagram of indoor environment
輻射源輻射的信號記為st(t,rt),經(jīng)過多徑傳播到達(dá)目標(biāo)點的照射信號為
式中:*表示卷積運算;M表示室內(nèi)復(fù)雜環(huán)境下有M條信號傳播路徑;ai為第i條信道接收信號的幅度;τi為第i條信道的時延.電磁波在近場傳播過程中,包含物體、墻壁之間的相互作用,是一個非線性過程,所以我們這里用一個信道傳遞函數(shù)(r0,rt)來表達(dá),其中包含了目標(biāo)位置信息.式(1)中第二行將傳輸信道近似為一線性多徑信道,第一項表示在視距情況下接收點接收到的直達(dá)波信號,第二項表示經(jīng)過各種反射、散射的多徑信號的疊加.
式(1)中的照射信號與目標(biāo)作用后產(chǎn)生散射信號,經(jīng)過多徑傳輸信道到達(dá)接收傳感器后的表達(dá)式為
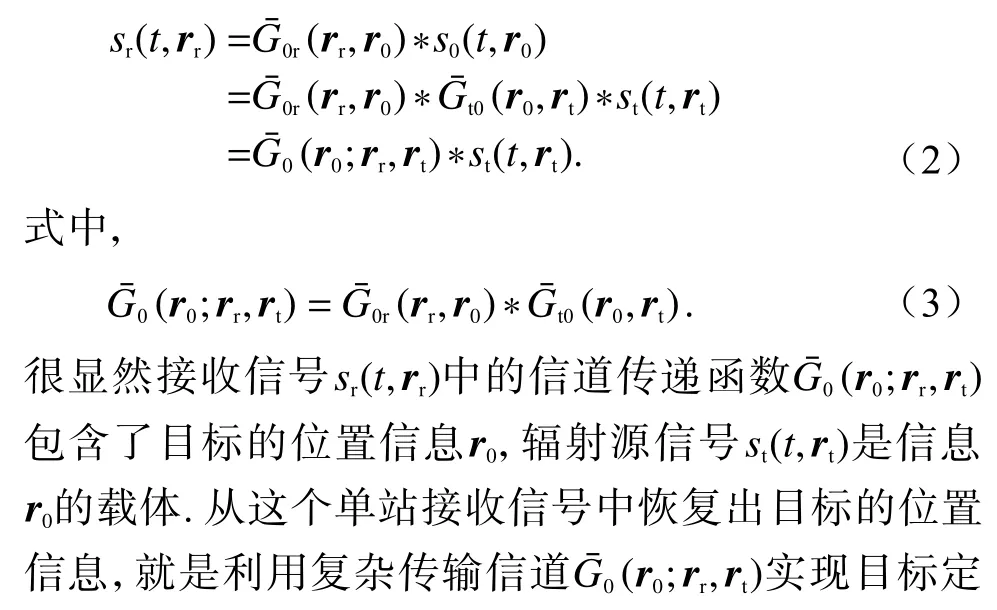

圖2 是在室內(nèi)二維情況下,利用電磁仿真軟件計算產(chǎn)生的2PSK 發(fā)射信號和兩個不同位置目標(biāo)的接收信號的波形圖.
圖2 發(fā)射信號和接收信號示意圖Fig.2 Schematic diagram of transmitted and received signals
圖2(a)為發(fā)射的2PSK 信號,圖2(b)和(c)為目標(biāo)位于不同位置點的接收信號.從圖2(b)、(c)可以看出,由于復(fù)雜傳播信道的作用,不同位置目標(biāo)經(jīng)過兩次復(fù)雜信道的傳輸,在接收點的信號包含了豐富的多徑信息.我們利用發(fā)射信號與接收信號卷積來近似觀察復(fù)雜信道特征,得到圖2(d)和(e),這些信號的起伏特征可為不同位置目標(biāo)定位提供重要信息.
從信息角度來考慮,由于復(fù)雜室內(nèi)環(huán)境中的多徑效應(yīng),接收信號包含更多的目標(biāo)位置信息.由于不規(guī)則墻壁的存在,信號傳播過程中會出現(xiàn)多次反射、散射的現(xiàn)象,在這一過程中,一方面由于復(fù)雜傳播信道中格林函數(shù)的貢獻(xiàn),另一方面由于目標(biāo)與障礙物間的復(fù)雜相互作用,包含的倏逝波信息轉(zhuǎn)移到傳輸波,從而接收點的接收信號中會包含攜帶目標(biāo)位置精細(xì)的細(xì)節(jié)信息.利用這些信息,就能夠?qū)崿F(xiàn)對目標(biāo)的精確定位,甚至超分辨定位.
接收信號中信道傳遞函數(shù)(r0;rr,rt)中包含目標(biāo)位置信息,當(dāng)室內(nèi)環(huán)境確知,輻射源位置rt和接收傳感器位置rr也確知的情況下,它包含目標(biāo)位置信息r0,輻射信號是其作用對象.對于常規(guī)的Wi-Fi 類信號,其載頻f0已知,調(diào)制樣式ms已知.問題是如何利用這些已知信息對r0實現(xiàn)最優(yōu)估計?

從式(4)可見,r0與接收信號之間是一個復(fù)雜的非線性函數(shù)關(guān)系,要寫出這樣的表達(dá)式非常困難,如何求解式(4),我們自然想到機(jī)器學(xué)習(xí)的方法.
2 基于深度學(xué)習(xí)的定位算法實現(xiàn)
神經(jīng)網(wǎng)絡(luò)的通用近似定理告訴我們,深度學(xué)習(xí)神經(jīng)網(wǎng)絡(luò)可以逼近到任何一個連續(xù)有界非線性函數(shù).因此,我們可以通過神經(jīng)網(wǎng)絡(luò)學(xué)習(xí)的方法解決式(4)的問題.
本文根據(jù)電磁仿真的訓(xùn)練數(shù)據(jù)集,合理設(shè)計深度學(xué)習(xí)CNN 結(jié)構(gòu),將定位問題轉(zhuǎn)化為回歸模型的問題.通過數(shù)據(jù)采集、特征提取和模型訓(xùn)練,建立信道指紋與位置之間的非線性關(guān)系來完成被動定位.
2.1 數(shù)據(jù)集的產(chǎn)生
考慮圖3 所示的二維典型的三居室房間布局情況下的定位問題.其中,Nx、Ny是每個房間對應(yīng)剖分的網(wǎng)格數(shù),在本文設(shè)定的場景下,Nx、Ny是常數(shù).為了模擬整個空間電磁波的傳播,我們在房間墻壁外設(shè)置了一個完全匹配層(uniaxial perfect lymatched layer,UPML).
對場景參數(shù)進(jìn)行設(shè)置.室內(nèi)環(huán)境是二維典型的三居室房間布局,如圖3 所示,包括兩個房間和一個走廊.A 區(qū)為實驗室,長8 m,寬6 m;B 區(qū)為走廊,長4 m,寬1.4 m;C 區(qū)為辦公室,長6 m,寬4 m.根據(jù)穩(wěn)定性條件,設(shè)置網(wǎng)格剖分大小為 Δx=Δy=0.2 m,因此三個場景分別占據(jù)30×40、7×20 和20×30 個網(wǎng)格,共1 558 個網(wǎng)格點.組合場景由不規(guī)則混凝土墻壁包圍,墻壁的電導(dǎo)率和相對介電常數(shù)分別為 σ=0.06和εr=6.4,墻壁厚度一般為24 cm,因此設(shè)置墻壁占據(jù)一層網(wǎng)格.墻壁外部區(qū)域填充的是空氣,最外圍由UPML 包圍,作為電磁仿真的吸收邊界.

圖3 房間模型參數(shù)設(shè)置Fig.3 Parameter settings for the room model
在神經(jīng)網(wǎng)絡(luò)訓(xùn)練過程中,訓(xùn)練數(shù)據(jù)對于神經(jīng)網(wǎng)絡(luò)的訓(xùn)練至關(guān)重要,也直接影響了訓(xùn)練生成的網(wǎng)絡(luò)對于處理新數(shù)據(jù)的準(zhǔn)確性.本文利用MATLAB 進(jìn)行編程,產(chǎn)生發(fā)射信號,利用時域有限差分(finitedifference time-domain,F(xiàn)DTD)法仿真出輻射源發(fā)射信號到接收點進(jìn)行采集的傳播過程.設(shè)置目標(biāo)位于室內(nèi)不同位置,輻射源輻射利用隨機(jī)產(chǎn)生的m序列調(diào)制的2PSK 信號,同時接收點記錄目標(biāo)位置和采集接收數(shù)據(jù),形成訓(xùn)練數(shù)據(jù)集.
2.1.1 輻射信號設(shè)置
對于接收站持續(xù)采集的信號,我們需要保證在輸入層輸入的訓(xùn)練數(shù)據(jù)中含有包含目標(biāo)位置的有效信息,即保證輸入的訓(xùn)練數(shù)據(jù)中應(yīng)盡可能多地包含發(fā)射信號經(jīng)過目標(biāo)反射后的散射回波以及經(jīng)過多次反射、散射后的多徑信號,使得位于遠(yuǎn)場的接收站能夠接收更多的目標(biāo)位置相關(guān)信息.
本文采用的輻射信號是目前數(shù)據(jù)通信中常用的2PSK 調(diào)制信號,為了滿足傳輸數(shù)據(jù)的隨機(jī)性,這里采用m序列產(chǎn)生調(diào)制數(shù)據(jù),以盡可能地考慮定位系統(tǒng)對數(shù)據(jù)通信的內(nèi)容沒有任何限制和要求.
PSK 信號是一種常用信號,使用二進(jìn)制的基帶信號來控制載波的相位,使載波的相位能夠反映出數(shù)字消息的特征,表達(dá)式如下:

式中:a表示脈沖幅度;TB為矩形脈沖的持續(xù)時間;fc為載波信號的頻率.基帶信號(t)與高頻載波相乘,使得數(shù)字基帶信號能夠控制高頻載波的相位.
2.1.2 基于FDTD 的數(shù)據(jù)集獲取
FDTD 以差分原理為基礎(chǔ),從麥克斯韋方程出發(fā),直接將其轉(zhuǎn)化為差分方程,能夠在離散數(shù)值時空中仿真再現(xiàn)電磁波傳播的物理過程.其二維TM 波的差分方程迭代公式為:
式中,CA(m),CB(m),CP(m),CQ(m)是與媒質(zhì)參數(shù)和時間、空間網(wǎng)格大小有關(guān)的參數(shù)[13].
輻射信號用線電流源J模擬,由式(8)中引入進(jìn)行激勵和輻射.
待定位目標(biāo)假設(shè)是一個正方形的金屬散射體,占據(jù)3×3 個網(wǎng)格.在產(chǎn)生不同數(shù)據(jù)集樣本的過程中,將目標(biāo)沿著室內(nèi)場景的剖分網(wǎng)格按序移動,記錄其處于不同位置時對應(yīng)的接收信號.在定位過程中,默認(rèn)目標(biāo)中心點坐標(biāo) (x,y)代表整個目標(biāo)的位置,目標(biāo)所占據(jù)網(wǎng)格的大小及整體位置坐標(biāo)為

為保證離散后差分方程組的解是收斂和穩(wěn)定的,離散麥克斯韋方程的穩(wěn)定性和收斂性對時間和空間離散間隔有一定的限制.依據(jù)Courant 穩(wěn)定性條件以及數(shù)值色散對空間離散間隔的要求,對空間離散 Δx、Δy,時間離散 Δt做出如下規(guī)定:

式中,λ表示信號的最小波長.
經(jīng)過FDTD 迭代適當(dāng)步數(shù)達(dá)到穩(wěn)態(tài)后,記錄接收點場強(qiáng)數(shù)據(jù)作為我們的訓(xùn)練輸入數(shù)據(jù),記錄目標(biāo)點位置作為輸出標(biāo)簽數(shù)據(jù).
利用FDTD 算法對圖3 所示室內(nèi)場景結(jié)構(gòu)進(jìn)行仿真,得到的室內(nèi)場強(qiáng)分布如圖4 所示.
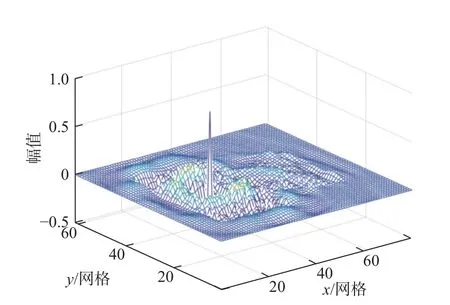
圖4 室內(nèi)場強(qiáng)分布Fig.4 Distribution of indoor electrical field
由于室內(nèi)的多徑反射,傳遞函數(shù)的復(fù)雜性,場強(qiáng)的空間分布信息非常豐富.
2.2 定位算法神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)設(shè)計
依據(jù)信號的物理特征構(gòu)建有效的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)對算法至關(guān)重要.從多徑信號中提取目標(biāo)位置信息,需要充分考慮多徑信號的時序特征,循環(huán)神經(jīng)網(wǎng)絡(luò)是一個不錯的選擇,但循環(huán)神經(jīng)網(wǎng)絡(luò)計算非常耗時,效果并不理想.
針對時序數(shù)據(jù)的這一特性,本文提出采用CNN來實現(xiàn),利用卷積處理局部序列的前后關(guān)聯(lián)性和特征提取,將看似雜亂無章的接收信號轉(zhuǎn)換為蘊(yùn)含信道傳遞規(guī)律的卷積結(jié)果.2PSK 信號經(jīng)過多徑傳輸,由圖2 可以看出卷積是提取多徑信息的有效方法,但由于發(fā)射信號調(diào)制數(shù)據(jù)并非已知,而我們知道發(fā)射信號序列是由0、1 構(gòu)成,也可以理解成由00、01、10、11 序列構(gòu)成,進(jìn)一步理解由000-111 構(gòu)成.考慮到0、1 沒有碼元的過渡信息,000-111 八個卷積核對接收數(shù)據(jù)長度有一定要求,本文采用00、01、10、11 序列構(gòu)成四個一維卷積核,實現(xiàn)對包含目標(biāo)位置信息的信道特征進(jìn)行提取.圖5 為圖3 場景下某一位置目標(biāo)產(chǎn)生的接收信號與四個卷積核卷積后得到的結(jié)果.


圖5 接收信號與不同卷積核的卷積結(jié)果Fig.5 Convolution results of received signals with different convolution kernels
由圖5 可以看到,不同的卷積核卷積結(jié)果呈現(xiàn)不同的規(guī)律性.從物理意義上講,卷積結(jié)果體現(xiàn)了目標(biāo)經(jīng)過墻壁、目標(biāo)反射散射后的時延變化特征,從而將時序信號中的時延信息轉(zhuǎn)換為體現(xiàn)空間分布情況的位置信息,然后利用全連接層,捕獲不同位置點的精細(xì)位置特征,最終實現(xiàn)室內(nèi)精確定位.
CNN 結(jié)構(gòu)如圖6 所示,神經(jīng)網(wǎng)絡(luò)主要由兩部分構(gòu)成:CNN 層、全連接層.

圖6 CNN 結(jié)構(gòu)Fig.6 Structure of CNN
輸入層為接收傳感器接收到的一段N維時間序列x=[x1,x2,···,xN],在輸入數(shù)據(jù)維數(shù)的選取上,為了使其充分含有信號傳播過程中的空間多徑信息,我們選取N=1 000,包含十個碼元長度和四十個載波周期.
在自定義卷積核的過程中,為了與發(fā)射的2PSK信號保持一致,卷積核中包含0 和1 兩種碼元信息,考慮到調(diào)制碼元含有信息及碼元長度的不同,決定CNN 層采用四個1×200 的卷積核.由于不同卷積核的卷積結(jié)果對應(yīng)著不同的物理意義,需要充分保留卷積結(jié)果,因此將池化層大小設(shè)為1,不對卷積結(jié)果做出舍棄.
全連接層設(shè)計為兩層隱藏層,由于要解決的是室內(nèi)定位問題,目標(biāo)的位置坐標(biāo)變化限制在一定范圍內(nèi),因此兩個隱層的激活函數(shù)分別設(shè)為ReLU 和Sigmoid;神經(jīng)元個數(shù)分別設(shè)為1 024 和512;最終的輸出層結(jié)果y對應(yīng)著目標(biāo)所處位置的橫縱坐標(biāo),是一個回歸問題;輸出層采用線性激勵函數(shù).
CNN 選用均方誤差(mean square error,MSE)作為代價函數(shù),表達(dá)式為

式中:N為小批量樣本的樣本數(shù)量;y?(x)和y(x)分別為對目標(biāo)的預(yù)測坐標(biāo)及標(biāo)簽坐標(biāo).
綜上所述,得到圖7 所示的訓(xùn)練流程圖.

圖7 CNN 訓(xùn)練流程Fig.7 The process of CNN training
3 實驗結(jié)果及分析
在實驗中,本文利用FDTD 方法產(chǎn)生神經(jīng)網(wǎng)絡(luò)需要的訓(xùn)練數(shù)據(jù)集和測試數(shù)據(jù)集,設(shè)置入射波為二維TM 波.針對不同情況,分別討論接收傳感器固定在室內(nèi)和室外、室內(nèi)環(huán)境存在噪聲、目標(biāo)大小發(fā)生變化的定位情況.
3.1 實驗一
本節(jié)討論輻射源位于室內(nèi)固定位置(25,30),接收傳感器位于室內(nèi)固定位置(58,38)時,利用神經(jīng)網(wǎng)絡(luò)對室內(nèi)目標(biāo)的定位情況.
在數(shù)據(jù)集采集過程中,目標(biāo)位于空間位置(x,y)處,輻射源持續(xù)發(fā)射信號,輻射信號采用m序列調(diào)制的2PSK 信號,載波設(shè)置為100 MHz.接收傳感器對信號進(jìn)行接收.假設(shè)接收信號長度為Nt,神經(jīng)網(wǎng)絡(luò)輸入維度N=1 000,記K=■Nt/N」,即目標(biāo)每一處位置標(biāo)簽(x,y)對應(yīng)著接收信號的K組數(shù)據(jù)集.
我們將CNN 與普通全連接層神經(jīng)網(wǎng)絡(luò)進(jìn)行對比,觀察二者的定位效果.為了減少計算量,本文設(shè)置訓(xùn)練小批量樣本大小為256,訓(xùn)練輪數(shù)為100,學(xué)習(xí)率為0.008,優(yōu)化器為Adam.
在定位耗費時間方面,主要對網(wǎng)絡(luò)的訓(xùn)練耗時比較多,且與筆記本性能關(guān)系較大,筆記本型號是ThinkPad T14s,CPU 為AMD 銳龍7 PRO 4850U,集成顯卡.
目前數(shù)據(jù)集大小是312 620×1 000,1 000 為輸入長度,312 620 為數(shù)據(jù)組數(shù).其中90%作為訓(xùn)練集,10%作為測試集.利用CNN 訓(xùn)練一輪的時間為3 min 左右,通常訓(xùn)練二十幾輪網(wǎng)絡(luò)能夠基本收斂,可以根據(jù)所需要的定位精度確定訓(xùn)練輪數(shù).在網(wǎng)絡(luò)訓(xùn)練結(jié)束后,我們對測試集內(nèi)所有點進(jìn)行定位,經(jīng)過計時,三萬多組數(shù)據(jù)的測試集定位大概需要1 min.
設(shè)計對比試驗中的普通全連接層神經(jīng)網(wǎng)絡(luò),記為FC Net,其中含兩層隱藏層,第一層隱藏層1 200 個神經(jīng)元,激活函數(shù)為ReLU;第二層隱藏層512 個神經(jīng)元,激活函數(shù)為Sigmoid;其余參數(shù)設(shè)定同CNN.
表1 為兩種不同神經(jīng)網(wǎng)絡(luò)測試結(jié)果.

表1 兩種神經(jīng)網(wǎng)絡(luò)的測試結(jié)果Tab.1 Results of the two neural networks
圖8 為不同情況下的訓(xùn)練和測試MSE 曲線.

圖8 訓(xùn)練和測試MSE 曲線(室內(nèi)單接收站)Fig.8 Training and test MSE curves(indoor single receiving station)
從實驗結(jié)果能夠明顯看出,相較于普通全連接層神經(jīng)網(wǎng)絡(luò),本文設(shè)計的組合CNN 具備更高的訓(xùn)練效率和更好的訓(xùn)練效果,僅利用普通神經(jīng)網(wǎng)絡(luò)八分之一的訓(xùn)練量,就達(dá)到了與其精度相差不大的訓(xùn)練效果.在訓(xùn)練數(shù)據(jù)量相當(dāng)?shù)那闆r下,CNN 訓(xùn)練精度遠(yuǎn)遠(yuǎn)高于普通全連接層神經(jīng)網(wǎng)絡(luò).對于測試數(shù)據(jù),該方法的平均坐標(biāo)定位距離誤差為0.621 個網(wǎng)格,對應(yīng)到空間實際平均定位距離誤差為12.42 cm.
經(jīng)過分析,CNN 的優(yōu)越性主要體現(xiàn)在,普通全連接層僅僅是對數(shù)據(jù)的訓(xùn)練,而非建立在時序信號物理特性的基礎(chǔ)上進(jìn)行的分析訓(xùn)練.本文的發(fā)射信號是m序列調(diào)制的2PSK 信號,是四種碼卷積核形式信號的組合,經(jīng)過空間中的多徑傳播,接收傳感器對其進(jìn)行接收,二者通過卷積,即不斷滑動求和,能夠捕捉到各種多徑信號.卷積相關(guān)峰波動較大的地方,代表信號在空間傳播過程中遇到墻壁等障礙物引起的反射,導(dǎo)致相位發(fā)生突變.當(dāng)與含有不同碼元信息的卷積核卷積時,這種相位的突變能夠體現(xiàn)室內(nèi)環(huán)境的幾何結(jié)構(gòu),且由于不規(guī)則的墻壁構(gòu)設(shè)、障礙物間的復(fù)雜相互作用,接收信號會包含攜帶目標(biāo)精細(xì)幾何細(xì)節(jié)的信息,因此可以通過卷積從中訓(xùn)練出有效位置信息.
3.2 實驗二
本實驗檢驗利用室外接收傳感器對室內(nèi)目標(biāo)的定位效果.實驗環(huán)境同實驗一,接收傳感器位于室外固定位置(57,15).
在本輪實驗中,利用CNN 進(jìn)行訓(xùn)練,本文設(shè)置K=203,訓(xùn)練小批量樣本大小為256,訓(xùn)練輪數(shù)為100,學(xué)習(xí)率為0.008,優(yōu)化器設(shè)置為Adam.
由于訓(xùn)練至30 輪時已基本收斂,下降幅度很小,因此取前30 輪代價函數(shù)值畫出變化曲線.圖9 為前30 輪的訓(xùn)練和測試MSE 曲線.
由圖9 明顯看出,CNN 能夠有效學(xué)習(xí)接收信號中的位置信息,從而實現(xiàn)室外接收站對室內(nèi)目標(biāo)的精確定位.測試過程中,平均定位距離誤差為0.482 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為9.64 cm.
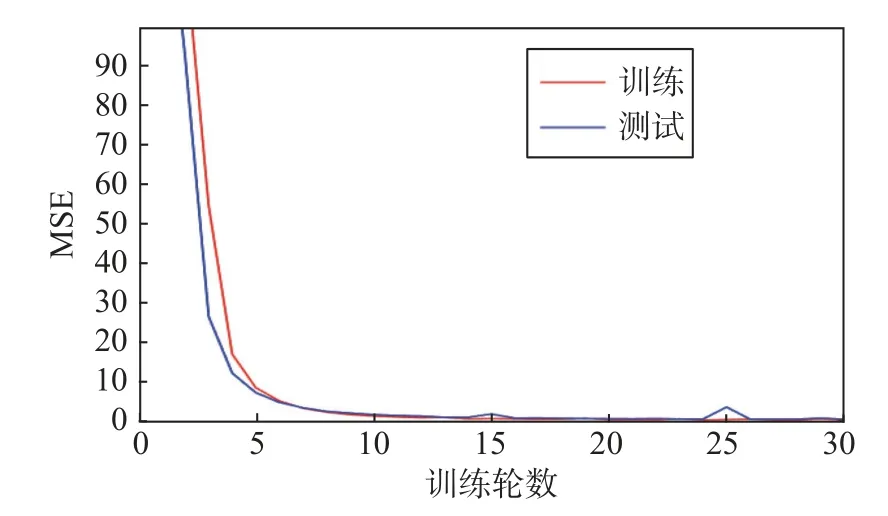
圖9 訓(xùn)練和測試MSE 曲線(室外單接收站)Fig.9 Training and test MSE curves (outdoor single receiving station)
圖10 為分別利用訓(xùn)練后網(wǎng)絡(luò)和測試接收數(shù)據(jù)集預(yù)測五個不同位置目標(biāo)的定位分布圖.圖中紅色圓點為目標(biāo)的位置標(biāo)簽,散落在目標(biāo)周圍的點為訓(xùn)練后的網(wǎng)絡(luò)對目標(biāo)的定位情況,顏色越淺,則定位坐標(biāo)偏離目標(biāo)位置越遠(yuǎn).從對同一位置目標(biāo)的定位分布可以發(fā)現(xiàn),通過該算法估計出的定位坐標(biāo)均勻地分布在標(biāo)簽周圍,即定位誤差方差較小,且每次定位精度較為穩(wěn)定,能夠?qū)崿F(xiàn)室外單接收站對室內(nèi)目標(biāo)的精確定位.

圖10 CNN 對任意目標(biāo)位置的定位分布圖Fig.10 The location distribution of CNN towards targets at any position
3.3 實驗三
本實驗檢驗算法在不同信噪比條件下利用CNN 對目標(biāo)的定位情況.實驗環(huán)境同實驗一.在實際環(huán)境中,或多或少地存在噪聲的影響,我們?nèi)藶榈卦诮邮斩思尤敫咚拱自肼暎阅M噪聲存在情況下的室內(nèi)定位,觀察該方法在不同信噪比條件下對目標(biāo)的定位情況.訓(xùn)練過程中,利用CNN,設(shè)置K=203,訓(xùn)練小批量樣本大小為256,訓(xùn)練輪數(shù)為100,學(xué)習(xí)率為0.000 8,優(yōu)化器為Adam.
表2 為不同信噪比下的定位情況.

表2 不同信噪比下的測試結(jié)果Tab.2 Results with different SNRs
通過對上述結(jié)果的分析,我們能夠?qū)崿F(xiàn)對不同信噪比環(huán)境下利用單接收站實現(xiàn)對室內(nèi)目標(biāo)的精確定位,且信噪比越高,定位精度越高.
為了減少訓(xùn)練次數(shù),驗證網(wǎng)絡(luò)的泛化性,本文利用在室內(nèi)理想無噪聲情況下的訓(xùn)練網(wǎng)絡(luò),實現(xiàn)對其他存在噪聲條件下的定位.當(dāng)測試數(shù)據(jù)中信噪比為20 dB 時,對目標(biāo)的平均定位距離誤差為3.812 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為76.24 cm;當(dāng)測試數(shù)據(jù)中信噪比為30 dB 時,對目標(biāo)的平均定位距離誤差為0.662 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為13.24 cm;當(dāng)測試數(shù)據(jù)中信噪比為40 dB 時,對目標(biāo)的平均定位距離誤差為0.43 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為8.6 cm.說明無噪聲理想環(huán)境下訓(xùn)練的網(wǎng)絡(luò)對含噪聲信號定位具有一定的泛化性.經(jīng)過分析,在對不同信噪比測試信號數(shù)據(jù)的定位過程中,卷積的過程相當(dāng)于是滑動平均,能夠起到噪聲平滑的作用.同時可以看出,隨著信噪比降低,定位精度下降明顯,即定位算法對噪聲具有敏感性.信噪比在高于20 dB 情況下,算法仍然能夠得到比較滿意的定位精度.
3.4 實驗四
本實驗檢驗算法在待定位目標(biāo)大小發(fā)生變化的情況下利用CNN 對目標(biāo)的定位情況.實驗環(huán)境同實驗一.
首先由實驗一得到目標(biāo)大小為3×3 個網(wǎng)格訓(xùn)練好的網(wǎng)絡(luò),利用該網(wǎng)絡(luò)結(jié)構(gòu)對1×1 大小的目標(biāo)進(jìn)行定位測試.經(jīng)過測試,平均定位距離誤差為6.378 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為1.276 m.
然后設(shè)置目標(biāo)大小為1×1,產(chǎn)生訓(xùn)練數(shù)據(jù),并對其進(jìn)行訓(xùn)練,訓(xùn)練環(huán)境同實驗一,網(wǎng)絡(luò)訓(xùn)練MSE 為0.333,測試MSE 為2.488.利用訓(xùn)練好的網(wǎng)絡(luò)結(jié)構(gòu)對3×3 大小的目標(biāo)進(jìn)行定位測試,經(jīng)過測試,平均定位距離誤差為5.359 個網(wǎng)格,對應(yīng)空間實際平均定位距離誤差為1.072 m.
對以上測試結(jié)果進(jìn)行分析,由于待定位目標(biāo)大小發(fā)生變化,其產(chǎn)生散射場的等效電流發(fā)生變化,接收信號隨之發(fā)生變化,因此定位精度會受到影響.但在用訓(xùn)練好的網(wǎng)絡(luò)對不同大小的目標(biāo)進(jìn)行定位時,本算法仍然能夠?qū)崿F(xiàn)米級的定位精度,說明本算法對不同大小目標(biāo)的定位具有一定的適應(yīng)性,適用于對定位精度要求不高的情況下的粗略定位.
3.5 實驗五
本實驗檢驗算法在待定位目標(biāo)大小發(fā)生變化的情況下利用CNN 對目標(biāo)的定位情況.實驗環(huán)境在實驗一基礎(chǔ)上增設(shè)一個金屬柜,如圖11 所示.

圖11 室內(nèi)場景示意圖(有金屬柜)Fig.11 Setting of room model parameter with a metal cabinet
金屬柜占據(jù)的網(wǎng)格坐標(biāo)位置范圍為

在場景發(fā)生變化的情況下,需要對訓(xùn)練數(shù)據(jù)集進(jìn)行更新,利用FDTD 方法生成新的訓(xùn)練集和測試集.訓(xùn)練結(jié)果如下所示:訓(xùn)練MSE 為0.076,測試MSE 為0.188,平均測試定位誤差為0.505 個網(wǎng)格,對應(yīng)實際誤差為10.10 cm.
記室內(nèi)房間沒有金屬柜的環(huán)境為場景A,室內(nèi)房間增設(shè)金屬柜的環(huán)境為場景B,利用場景A 訓(xùn)練的網(wǎng)絡(luò)對場景B 的測試數(shù)據(jù)進(jìn)行測試,定位效果不甚理想.經(jīng)過分析發(fā)現(xiàn)主要是因為在室內(nèi)場景中放置金屬柜以后,對室內(nèi)輻射源信號的傳播信道影響較大,導(dǎo)致其與場景A 下的空間傳播路徑區(qū)別很大,因此由場景A 訓(xùn)練出的神經(jīng)網(wǎng)絡(luò)節(jié)點間的權(quán)重和偏置相差很大,CNN 難以對場景B 的目標(biāo)進(jìn)行精確定位.
4 結(jié) 論
本文提出一種室內(nèi)單站定位技術(shù),利用CNN 對室內(nèi)電波傳播的多徑效應(yīng)構(gòu)成的復(fù)雜信道信息進(jìn)行學(xué)習(xí),通過自定義卷積核,賦予神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)一定的物理意義,實現(xiàn)高效的精確定位.本文通過訓(xùn)練實現(xiàn)了固定接收單傳感器位于室內(nèi)和室外情況下的精確定位.
在單接收站位于室內(nèi)時,能夠?qū)崿F(xiàn)一個網(wǎng)格(0.2 m)內(nèi)的精確定位,對測試數(shù)據(jù)的平均定位距離誤差為0.621 個網(wǎng)格(12.42 cm);當(dāng)單接收站位于室外時,測試數(shù)據(jù)的平均定位距離誤差為0.482 個網(wǎng)格(9.64 cm);針對存在噪聲環(huán)境試驗發(fā)現(xiàn),噪聲在信噪比高于20 dB 情況下,算法仍然能夠得到比較滿意的定位精度.該算法具備一定的抗噪聲性和泛化性,為室內(nèi)定位提供了一種新的方法.本文是在二維相對理想條件下進(jìn)行的算法設(shè)計,算法如何推廣到三維,以及適應(yīng)不同大小的目標(biāo)、目標(biāo)的運動情況都需要進(jìn)一步研究.
猜你喜歡
中等數(shù)學(xué)(2022年2期)2022-06-05 07:10:50
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2020年6期)2020-07-25 02:31:36
小學(xué)生學(xué)習(xí)指導(dǎo)(低年級)(2018年9期)2018-09-26 05:59:44
瘋狂英語·新讀寫(2018年2期)2018-09-07 09:32:10
電子制作(2018年11期)2018-08-04 03:25:42
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
中外會展(2014年4期)2014-11-27 07:46:46
