具有牽引失效自檢測功能的高負載比微型拖曳機器人設計方法
2022-11-16 16:26:10王亞鋒
海軍航空大學學報 2022年1期
關鍵詞:檢測
王亞鋒,田 雨,崔 晶
(1.32021部隊,北京 100094;2.北京工業大學,北京 100094)
隨著機器人技術的不斷發展,機器人小型化、微型化已逐漸成為熱門研究方向。微型機器人最大的優勢在于體積小、重量輕、機動靈活。它們在狹小的空間可以輔助或者獨立完成人類無法完成的任務[1],并在醫療、工業等領域均有著巨大的應用價值,但同時,它又因體積小,難以提供大的負載能力,而只能作為小型的移動探測器或提供很小的負載力[2-3]。
傳統微型機器人難以實現大負載力的原因在于它們都是依靠自身的移動來帶動負載的移動,拖曳負載的能力完全取決于機器人驅動能力的大小。常用的驅動技術有微型電機驅動[4-5]、壓電驅動[6-7]、形狀記憶合金驅動[8]等。微電機驅動的優勢在于可以在微型化的同時實現高精度的速度和位置控制,但由于驅動力大小與電機的減速裝置有關,微型化的同時,輸出功率也被限制,因而難以提供較大的輸出力;壓電驅動的優點是小體積可以提供大的輸出力,響應速度快,然而需要較高的驅動電壓,并且輸出位移小;形狀記憶合金的優點是輸出位移大,驅動力大,缺點是由于需要加熱和冷卻,所以響應速度變慢。
近年來,一些學者根據壁虎腳掌黏附墻面的仿生學原理,設計了1 種基于分子間范德華力作用的黏附腳掌[9],即通過很小的腳掌就可以產生很大的黏附力,這為設計具有大負載能力的微型機器人提供了1個新的思路。2011年,美國卡內基梅隆大學的研究人員基于黏附腳掌理論設計出了1 種微型機器人[10],它可以在水平或垂直表面自由運動,并且可以在垂直表面攜帶100 g(超過自重17%)的負載。2015 年,美國斯坦福大學的研究人員同樣基于仿壁虎的黏附腳掌理論設計了1 種輪式微型機器人μTug[11],它可以產生最大38 N 的拉力,最多可以拖拽22 kg 負載,超過自身質量1 800 倍。由于所接觸的表面污漬對黏附腳掌的加載性能會產生影響,所以考慮如何對黏附腳掌在加載時出現的失效行為進行準確估計,是亟待解決的問題。
本文基于楔形剛毛陣列的黏附腳掌原理,設計了1 種具有牽引失效自檢測的微型拖曳機器人。首先,針對黏附腳掌的加載、脫附的特性,設計了機器人的驅動方式和運動方式,在保證黏附腳掌加載可靠性和易脫附性的基礎上,實現機器人的移動;然后,采集了從加載到黏附失效過程中黏附力的變化曲線,分析了黏附腳掌失效時黏附力的變化特征,采用電容式觸覺傳感器[12]對牽引失效現象進行檢測,并將電容式觸覺傳感器集成到機器人上,實現微型機器人牽引失效的自檢測;最后,設計實驗樣機,驗證了微型機器人設計的可行性。
1 微型機器人的結構設計與運動過程分析
1.1 系統構成
微型拖曳機器人主要由3 個部分構成:機器人的運動控制系統、機器人驅動執行結構與牽引失效的檢測系統。如圖1 所示,數字1~11 分別表示:1)電機驅動電路板,2)核心控制電路板,3)底板,4)摩擦墊,5)前臂,6)驅動輪,7)直流減速電機,8)電機套筒,9)觸力傳感器,10)黏附腳掌,11)舵機。
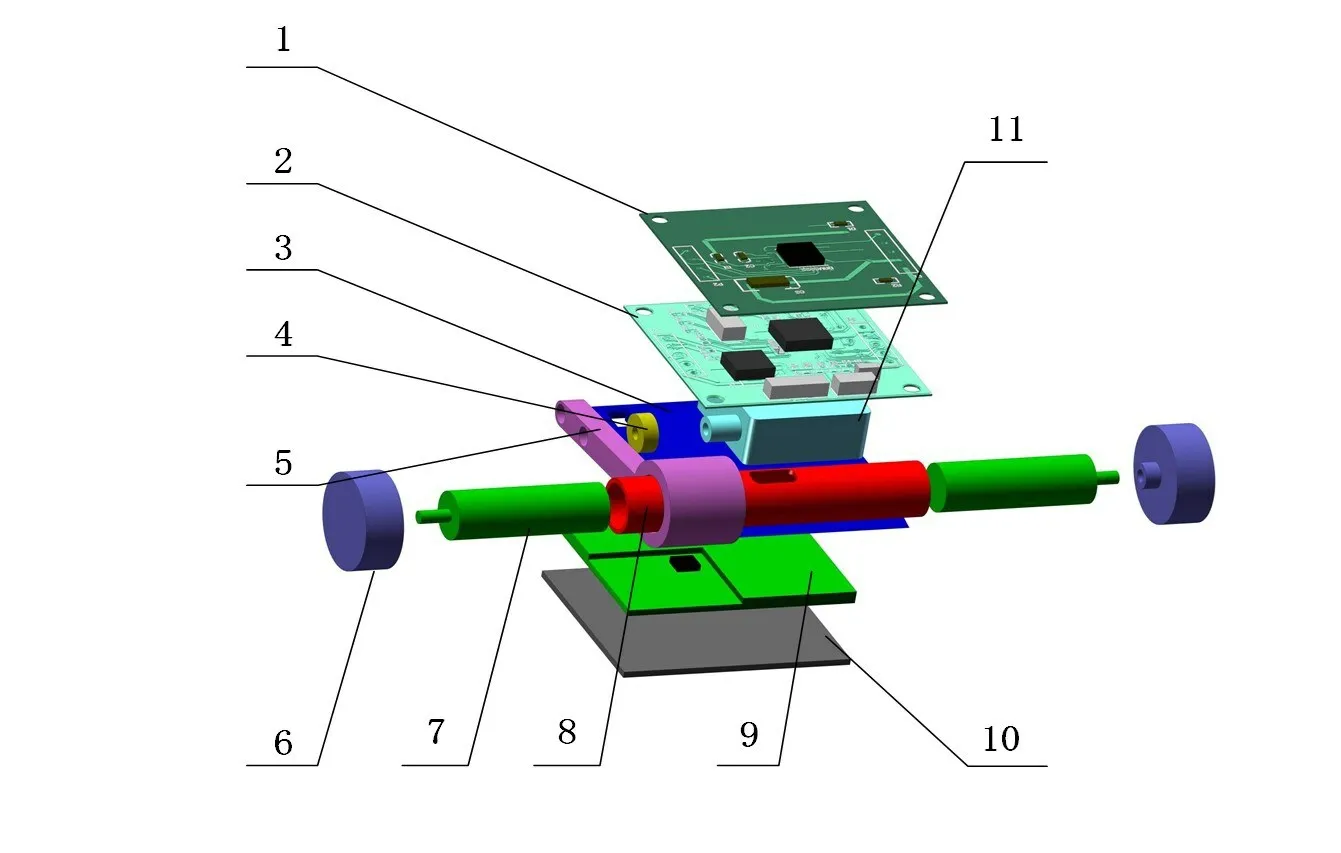
圖1 微型拖曳機器人的構成Fig.1 Composition of micro towing robot
機器人的運動控制系統由核心控制電路板與電機驅動電路板組成。核心控制電路板用于產生PWM信號來控制舵機,同時通過電機驅動電路板控制直流減速電機。
機器人驅動執行結構主要包括舵機、前臂、黏附腳掌、直流減速電機和驅動輪。其中,舵機用于驅動黏附腳掌的加載與脫附,通過前臂來控制電機套筒的升降,控制驅動輪與接觸表面,實現牽引狀態和移動狀態的切換。
牽引失效的檢測系統主要通過觸力傳感器(本文采用電容式觸力傳感器)來實現。觸力傳感器對加載過程中黏附力的變化數據進行采集,并對采集的數據進行差分、濾波等處理,再與設定的閾值進行對比,最終實現失效檢測。
1.2 微型機器人的運動過程分析
與傳統的微型機器人相比,本文所設計的微型機器人模仿尺蠖運動,將拖曳負載的過程與自身移動的過程分開,1 個運動周期分為牽引負載移動和機器人自身移動,如圖2 所示。這樣可避免微型機器人只能通過自身移動來拖動負載的問題。
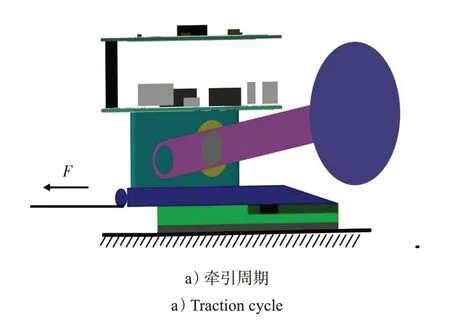

圖2 微型拖曳機器人的運動周期Fig.2 Motion cycle of micro towing robot
當機器人牽引負載時,舵機開始逆時針旋轉收緊腱線,同時拉動負載,此時與前臂固定在一起的電機套筒被抬起,驅動輪離開接觸面。同時,黏附腳掌與接觸面接觸,依靠機器人與負載之間的相互作用力,為黏附腳掌提供切向載荷,實現黏附腳掌的黏附,通過黏附力將機器人固定在表面上,保證在舵機拉負載的過程中機器人不被相互作用的力拉動,即實現牽引負載的功能。
當機器人自身移動時,舵機開始順時針旋轉釋放腱線,此時與前臂固定在一起的電機套筒被放下,驅動輪與接觸面接觸。同時,依靠前臂的支撐使黏附腳掌與接觸表面分離,機器人從接觸表面被釋放,驅動輪通過核心控制單元輸出信號使其轉動,實現機器人的自身運動。以上2 個狀態交互執行,最終實現微型機器人牽引負載的功能。
1.3 黏附力的產生機理
微型拖曳機器人所需牽引力設計原理源自北京工業大學機電學院已有的1 種楔形剛毛陣列[13-14]的黏附腳掌,該黏附腳掌仿照壁虎腳掌的結構制作而成,其表面由數個微米級的楔形剛毛構成,如圖3所示。

圖3 掃描電鏡下的楔形剛毛陣列Fig.3 Observation of the wedge-shaped bristle array by scanning electron microscope
與纖維狀剛毛[15]、蘑菇狀剛毛[16-17]相比,楔形剛毛陣列的最大優點是可以對施加的切向載荷的變化做出非常快速地響應,容易實現脫附。對于驅動力比較差的微型機器人來說,楔形剛毛陣列易脫附的特點至關重要,楔形剛毛實物圖,如圖4所示。

圖4 楔形剛毛實物圖Fig.4 Physical picture of wedge-shaped bristles
黏附腳掌被放置在接觸面上時,只有楔形剛毛陣列的尖端與接觸表面接觸,接觸面積很小。當對黏附腳掌施加切向載荷時,受到剪切力的作用,剛毛彎曲,且剛毛側面與接觸表面接觸,剛毛的彎曲增加了黏附腳掌與接觸表面的接觸面積,從而使黏附腳掌產生超強的黏附力[18]。當黏附腳掌的切向載荷被釋放時,楔形剛毛將恢復到原來的狀態,楔形剛毛與接觸表面的接觸面積減少,黏附力消失,實現黏附腳掌的脫附。楔形剛毛在加載、脫附過程中的變化,如圖5所示。
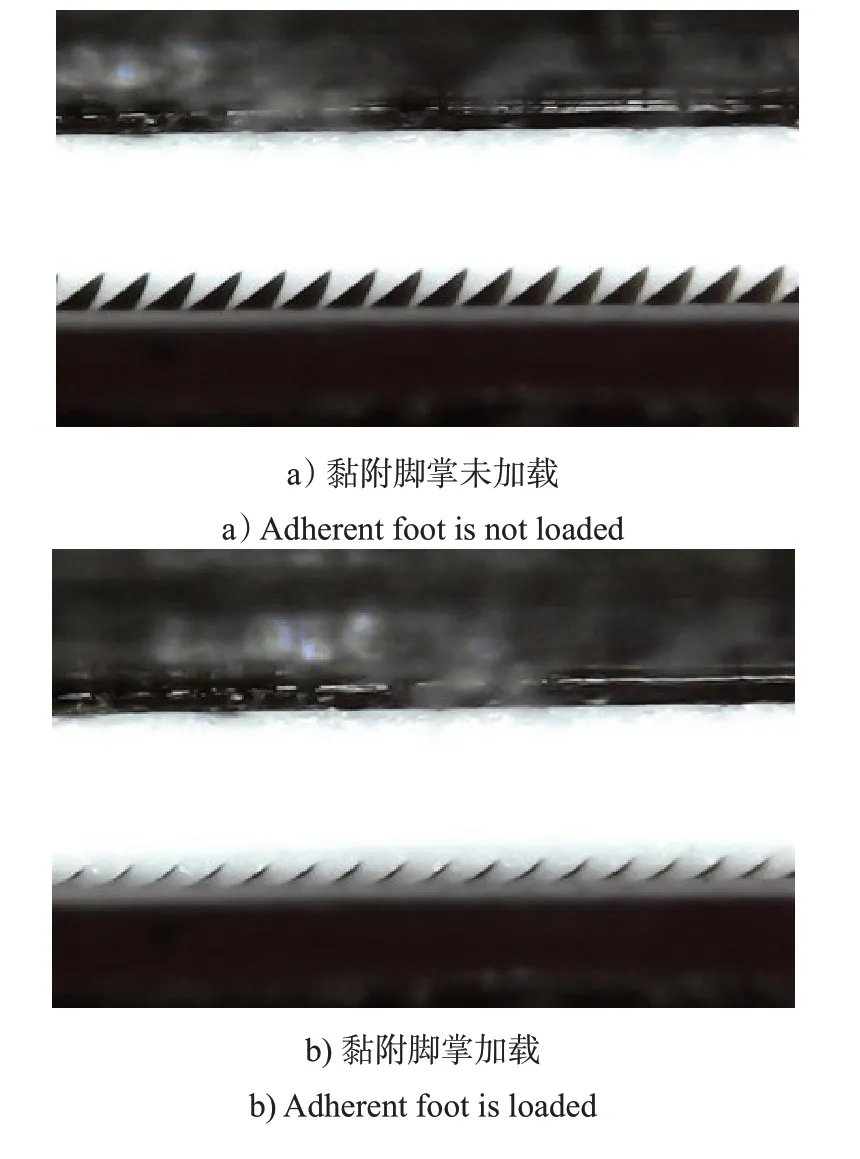
圖5 楔形剛毛在加載脫附過程中的變化Fig.5 Changes of wedge-shaped bristles during loading and detaching
2 牽引失效檢測方法的原理與實現
2.1 牽引失效檢測方法的原理
牽引失效即為牽引過程中黏附腳掌的黏附失效。由于微型機器人在牽引負載時依靠黏附腳掌將其自身固定在接觸表面上,通過黏附腳掌所產生的黏附力保證舵機在拖曳負載時,機器人不會被相互的作用力拉動。但是,黏附腳掌所提供的黏附力并不是無限大的,而且接觸面的瑕疵和污染都會影響到黏附腳掌的黏附效果。黏附力失效會導致微型機器人在拖曳負載時被相互作用力拉動而脫離接觸表面,從而破壞機器人的正常工作周期。
黏附腳掌所產生的黏附力與摩擦力不同,黏附力的大小不取決于法向力的大小,而是與接觸表面面積有關,通過接觸面積的變化可以判斷黏附腳掌是否失效。對于接觸面積的測量,一般采用光學的方式測量:將腳掌置于通明面板上,通過LED 燈對面板進行照射,腳掌與面板接觸的地方,光線被反射回來,沒有接觸的地方光線反射量小,由此得到接觸面積的大小。但對于微型拖曳機器人而言,該方法難以被集成。
因此,我們將每1 根楔形剛毛等效為1 個非線性彈簧,楔形剛毛陣列可以看成是若干個非線性彈簧并聯,從而將接觸面積的大小等效為非線性彈簧剛度的大小,如圖6所示。

圖6 楔形剛毛等效模型Fig.6 Equivalent model of wedge-shaped bristles
當黏附腳掌沒有被加載時,楔形剛毛的尖端與接觸表面接觸,此時沒有黏附力產生;當黏附腳掌被加載時,楔形剛毛在加載力的作用下發生形變,此時接觸面積增大。楔形剛毛的總剛度增大,黏附力隨之增大。隨著加載力的繼續變大,楔形剛毛形變所產生的彈性力逐漸大于其產生的黏附力,導致部分楔形剛毛脫離接觸表面,此時接觸面積減小,楔形剛毛的總剛度減小,黏附力也隨之減小直至失效。故可通過黏附腳掌的剛度變化,反映黏附力的大小變化。
由于切向加載力與黏附力等大反向,通過對切向加載力隨時間的變化率的測量,我們可以間接得到黏附腳掌的等效彈簧剛度的變化規律,進而得到黏附腳掌與表面的接觸面積的變化:

2.2 牽引失效檢測方法的實現
根據上述內容,通過設計1 種基于電容式觸力傳感器的閾值檢測法,對黏附腳掌的失效產生進行檢測。利用電容式觸力傳感器實時監測微型機器人在牽引負載時黏附力的變化情況,并依靠檢測信號快速切換到機器人的自身移動的周期,避免牽引失效現象的發生。
該傳感器切向測量單元基于電容極板間變面積的測量原理實現黏附力變化的檢測,2 個電容極板分別設置在2 塊不同的電路板上,電容極板在電路板上分布采用的差分指狀結構,有助于提高傳感器的靈敏度。切向介質層采用了1種超薄的硅膠彈性體。將黏附腳掌固定在下層電路板上,底板固定在上層電路板上。當牽引負載時,由于切向加載力的作用,上層電路板相對于下層電路板,容易發生水平位移,2個電容極板之間的相對面積會發生改變,從而使電容值發生變化。通過對電容值變化的測量,得到加載過程中黏附力的變化,如圖7所示。

圖7 觸力傳感器的切向力檢測原理Fig.7 Principle of tangential force detection for contact force sensors
黏附腳掌加載到失效的過程中,黏附力隨時間的變化曲線、黏附力變化速度隨時間的變化曲線,如圖8所示(加載是反向加載,故力值為負)。

圖8 黏附腳掌加載時的黏附力變化及變化速度Fig.8 Change and change rate of adhesion force for loaded adherent foot
當黏附失效發生時,黏附力下降,黏附力的變化速度會發生明顯的突變。通過設定閾值來檢測黏附力變化速度的突變,從而實現黏附失效的檢測。
對于微型拖曳機器人而言,閾值的設定還要考慮當負載被拉動時,負載由靜止到運動會產生1 個靜摩擦向滑動摩擦的轉變,由于最大靜摩擦力大于滑動摩擦力,所以受動靜摩擦力轉變的影響,切向加載力會瞬間減小,切向加載力的減小同樣會造成黏附力變化速度的突變,如圖9所示。


圖9 負載被拉動時的黏附力變化及變化速度Fig.9 Change and change rate of adhesion force when the load is dragged
通過比對發現,負載被拉動時黏附力的變化加速度明顯小于黏附腳掌失效時黏附力的變化加速度,通過設定合適的閾值,可以區分負載移動對失效判斷的影響。
綜上所述,牽引失效檢測方法的實現可整理如下:
第一步,對機器人的負載能力進行測試,明確微型機器人的最大負載能力;
第二步,給機器人加載超過其最大負載能力的負載,根據牽引失效時黏附力變化速度的突變情況采樣,確定黏附腳掌失效檢測的閾值設置上限,記為bu;
第三步,給機器人加載小于其最大負載能力的負載,采樣負載被拉動時,動靜摩擦轉變產生的黏附力變化速度的突變情況,確定黏附腳掌失效檢測的閾值設置下限,記為b1;
第四步,選取合適的閾值b,滿足b1<b<bu;

3 微型拖曳機器人的實驗驗證
3.1 微型拖曳機器人及其實驗系統
對微型機器人的負載能力進行了多次測量,微型拖曳機器人使用的黏附腳掌,采用標稱對稱啞鈴片作為機器人的負載,如圖10所示。機器人的最大負載質量可以達到12 kg,機器人自重只有52 g,負載超過自身質量的231倍,實現了機器人高負載自重比。

圖10 機器人牽引12 kg 負載Fig.10 Robot tows 12 kg load
3.2 微型拖曳機器人拖曳實驗及牽引失效檢測
為了驗證牽引失效方法的可行性,我們在光滑的玻璃表面進行機器人拖曳負載實驗,使負載的總重量超過機器人的最大負重極限,微型機器人能否拖動負載,將決定測試結果成功與否。我們對機器人整個運動過程中的黏附力的變化以及負載的運動狀態進行檢測,通過這2 個變量的變化來驗證牽引失效檢測方法的可行性。
在負載上加裝加速度計ADXL345,以檢測負載的運動狀態。當負載靜止時,加速度數值沒有明顯的變化。當負載被拖動的一瞬間,由于動靜摩擦力的改變,水平方向上會產生1個加速度,通過檢測這個信號來確定負載是否產生運動。同時,應用電容式觸覺力傳感器來檢測加載過程中的黏附力變化情況。通過對整個運動過程中加速度變化和黏附力變化信息的采集,表征出機器人的運動狀態和負載的運動狀態,測試結果,如圖11所示。
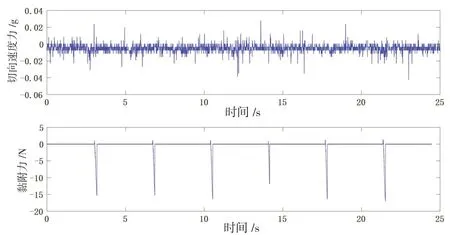
圖11 牽引失效時加速度與黏附力的變化Fig.11 Changes of acceleration and adhesion force during traction failure
在圖11 中,由于負載沒有被機器人拉動,負載上的加速度計所采集的信號基本上都是高頻的噪聲,加速度沒有明顯變化,負載處于靜止狀態,此時黏附力呈現周期性的變化。在機器人的牽引周期中,黏附腳掌加載,黏附力逐漸增大,由于負載的重量超過機器人的負載能力,黏附腳掌發生失效,通過牽引失效檢測使機器人停止加載,黏附力減小為0,同時機器人從牽引狀態轉變為移動狀態,此時黏附力為0,直至下一次的牽引周期。由于機器人牽引失效檢測的存在,可以使機器人在檢測到失效后,立刻從牽引狀態改為移動狀態,從而避免黏附失效對機器人運動產生破壞性的影響,最終完成牽引失效的檢測。
同時,我們還測試了牽引失效檢測對機器人正常加載時的影響。同樣在光滑的玻璃表面進行機器人拖曳負載的實驗,使負載的總重量小于機器人的最大負重極限,確保機器人可以牽引負載,測試結果,如圖12所示。

圖12 正常加載時加速度和黏附力的變化Fig.12 Changes of acceleration and adhesion force during normal loading
在圖12 中,由于負載被機器人拉動,所以此時負載上的加速度計所采集的信號有明顯的變化,加速度發生突變的時間,剛好出現在黏附腳掌加載時。黏附力由于動靜摩擦的轉變而突然下降的時候,從黏附力的變化來看,機器人處于正常的加載、移動交替變換的運動周期中。由此可見,引入失效檢測的方法后,在正常加載而沒有發生黏附失效時,機器人對負載的加載沒有受到牽引失效檢測引入的影響。
4 結論
本文基于楔形剛毛陣列的仿生黏附腳掌原理,設計了1 種具有牽引失效自檢測的微型機器人,該機器人解決了微型機器人的小體積和大負載能力之間的矛盾,為高負載能力的微型機器人設計提供了1 種新的思路。同時,本文對黏附腳掌在加載時黏附力失效的問題進行了研究,并且根據黏附腳掌在應用時黏附力的變化特征,設計了1 種基于閾值檢測的牽引失效檢測的方法。
設計的機器人樣機在質量僅有52 g 的情況下,可以在光滑表面拖動12 kg 的負載,負載自重比可以達到231 倍,實現了微型機器人高負載自重比的能力。通過對加載過程中負載的運動狀態以及黏附力的變化情況的檢測,驗證了牽引失效方法的可行性,并通過樣機實際負載進行了驗證。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
