基于輕小型無人機雷達的植被高度反演方法
2022-11-19 06:53:28吳志鵬
系統工程與電子技術 2022年12期
關鍵詞:信號
吳志鵬, 張 平, 李 震, 黃 磊, 劉 暢, 高 碩
(1. 中國科學院空天信息創新研究院, 北京 100094; 2. 三亞中科遙感研究所海南省地球觀測重點實驗室, 海南 三亞 572029; 3. 中國科學院大學, 北京 100049)
0 引 言
植被高度是森林資源質量評價體系的重要指標參數,表征了森林的生長狀況及其健康程度,為科學合理地制定森林資源經營管理措施提供了有效依據。作為主要的森林結構參數之一,植被高度在林業遙感領域成為森林蓄積量、地上生物量(aboveground biomass, AGB)和碳儲量估測研究的主要因子[1]。傳統的基于地面實測數據的森林資源調查方法對植被高度數據的獲取需要耗費大量人力物力,時效性差,無法實現森林高度的動態監測,且難以獲取大范圍森林高度觀測信息,不能滿足森林資源管理、監督和可持續利用的需求。衛星遙感技術能夠快速、準確、宏觀地以不同時空尺度獲取地面森林資源分布、結構、動態變化及過程信息,已經廣泛地應用于大尺度范圍的植被高度信息獲取[2-4]。而對于較小尺度森林生態系統的監測,衛星遙感的分辨率和精度往往很難滿足應用需求。
近年來,輕小型無人機與遙感傳感器的快速發展,為森林資源的遙感監測提供了新的手段[5]。與衛星遙感相比,無人機平臺的飛行高度通常不超過500 m,屬于近地觀測范疇,能夠獲得更高分辨率和精度的目標區域觀測數據[6];與航空遙感相比,無人機能夠由內置的飛行控制系統實現航線規劃和自動執飛功能,具有低成本、易操作、便于攜帶等特點,并且不受起飛場地的限制,機動性強。其搭載的不同傳感器能夠獲得多層面的森林資源調查數據,豐富了數據的多樣性,大大拓展了森林資源調查的深度和廣度[7-8]。
目前,國內外無人機遙感的植被高度反演研究大都基于激光雷達(light detection and ranging, LIDAR)[9-11]或合成孔徑雷達(synthetic aperture radar, SAR)[12]載荷。LIDAR利用激光掃描測量距離和角度[13],慣性測量單元(inertial measurement unit, IMU)測量姿態以及通過差分全球定位系統(differential global positioning system, DGPS)達到厘米級定位,能夠獲取高分辨率、高精度的數字地表模型進而提取植被高度等信息[14]。已有學者嘗試使用激光掃描儀集成的無人機LIDAR系統進行植被高度反演研究,例如Zhang等[15]基于RIEGL VUX-1無人機載LIDAR系統獲取了呼倫貝爾地區0.1 m分辨率的草地植被高度分布信息,并進一步估測了該區域的AGB。Guo等[16]利用配備了VLP-16激光掃描儀的無人機LIDAR系統,繪制了中國地區3種生態系統的高分辨率冠層高度模型。Sankey等[17]將無人機LIDAR數據與高光譜數據融合,提升了高生物量地區植被冠層高度和數字高程模型(digital elevation model, DEM)反演的準確率。但高昂的數據獲取成本限制了LIDAR的大規模應用。SAR作為一種主動式的微波對地觀測系統,其發射的信號波長較長,能夠穿透部分樹枝、樹葉到達冠層下部,具有獲得指示植被垂直方向參數的能力,已經被廣泛地應用于森林高度信息提取[18]。Hensley等[19]首次將多基線極化干涉無人機SAR數據應用到森林結構反演中,先利用Rvog模型分離地體散射,然后對來自地表和冠層信號采用頻譜分析的方法分別進行層析成像,進而提取植被高度。El Moussawi等[20]和Asopa等[21]利用Capon譜估計的方法對L波段無人機SAR數據進行層析成像,得到了熱帶雨林的三維結構,并進一步估算出了森林冠層高度。可以看出,目前主要通過SAR層析數據得到植被高度維剖面進而反演植被高度[22-23],而層析處理算法較為復雜,且要求高質量的多航過數據,因此雷達系統較為復雜,通常使用大型無人機,成本較高。本文研制了一種高度集成、輕量化、高可靠性的無人機雷達系統,能夠滿足輕小型無人機載荷的需要,并提出一種利用該系統獲取的數據反演植被高度信息的方法,該方法模型簡單、處理便捷,且只需一次航過便可反演得到植被高度值。
1 無人機雷達系統與數據獲取
無人機雷達系統采用模塊化設計,具備高度集成、輕量化、高可靠性等特點,平臺的搭建以模塊化的信號收發器為基礎,利用單板計算機(single board computer,SBC)完成雷達信號發射/接收通信管理,利用超寬帶信號處理器產生脈沖信號,通過對數周期天線發射、接收信號,利用數據記錄板采集數據信息,整個系統集成后掛載在無人機平臺下。無人機雷達協同的硬件組成如圖1所示。
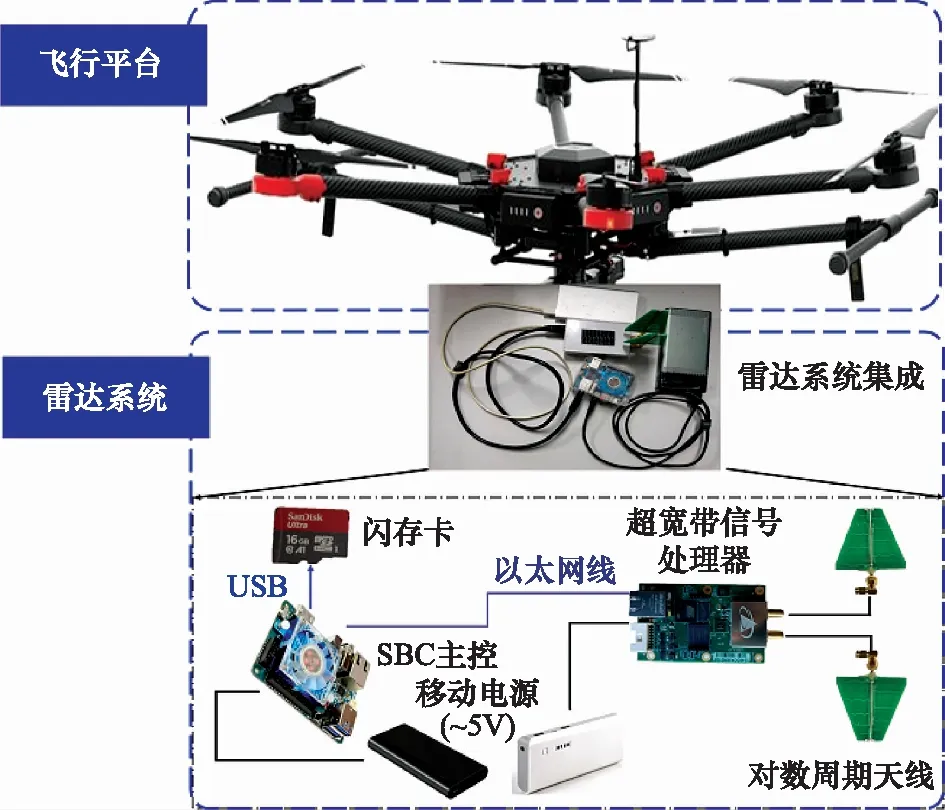
圖1 無人機雷達協同的硬件組成
雷達系統的主控模塊選用通用單板計算機,分別通過以太網、通用串行總線(universal serial bus, USB)接口完成與超寬帶信號處理器、存儲模塊的通信連接。雷達模塊選用PulsOn 440超寬帶信號處理器(簡稱P440)產生脈沖信號,其工作頻率在3.1~4.8 GHz之間,中心頻率為3.95 GHz。P440能夠對每一個發射脈沖的能量進行相干疊加,在不改變發射強度的基礎上,累積更多的脈沖能量以增加接收信號的信噪比,有效改善了系統的接收性能。雷達系統的天線采用發射、接收雙天線設計,選擇對數周期天線,天線波束寬度為30°,增益設計為6 dB,頻率范圍可達2~11 GHz,以下視配置安裝在雷達上。
為了對無人機雷達系統的有效性進行評估,于2021年4月21日在海南省文昌市八門灣紅樹林保護區內進行測試實驗,實驗區域如圖2所示。共飛行2個架次,一號航線飛行距離約315 m,飛行時間約5 min,二號航線飛行距離約584 m,飛行時間約10 min。無人機飛行高度均設置為44 m,飛行速度為1 m/s,航向采樣率約為5 Hz。雷達觀測的快時間窗設置為166.1~332.6 ns,在600 s的慢時間范圍內采集雷達原始數據,每條掃描數據在高度向上有3 264個采樣點。
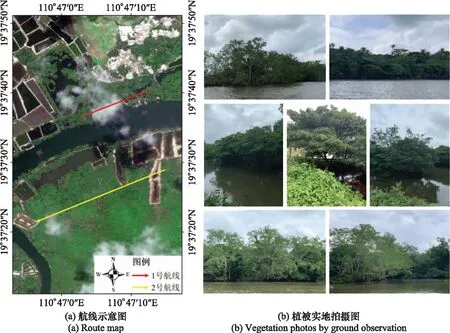
圖2 實驗區域
輕小型無人機在飛行過程中容易受到不平穩氣流的影響,倘若飛行平臺在氣流影響下造成嚴重顛簸,會使獲得的雷達圖像失真,從而給目標檢測和定位帶來困難。飛控系統中記錄的兩次航過的飛行姿態數據顯示,無人機平臺飛行高度在43.9~44.0 m的范圍內波動,俯仰角和偏航角的擺動幅度均不超過5°,在高度測量誤差允許的范圍內,可以近似認為航線姿態是穩定的。
2 數據處理
被觀測目標在無人機雷達圖像上的特征取決于目標的位置、形狀、散射特性、電磁波傳播速度以及飛行平臺的速度等[24]。由于實際應用場景中雷達波的介質環境非常復雜,接收信號的成分既包含目標回波,也包含噪聲和干擾等,通常信噪比較低。為了提高無人機雷達圖像質量,實現對目標信息的精確提取,需要對獲得的原始數據進行處理。首先,通過回波信號變換將原始實數數據轉換為雷達復數數據;然后,再降低直耦波和噪聲對目標后向散射的影響;最后,利用基于互相關信息的后向投影方法進一步增強目標信號,以提取到更可靠的植被高度。數據處理方法的具體流程如圖3所示。
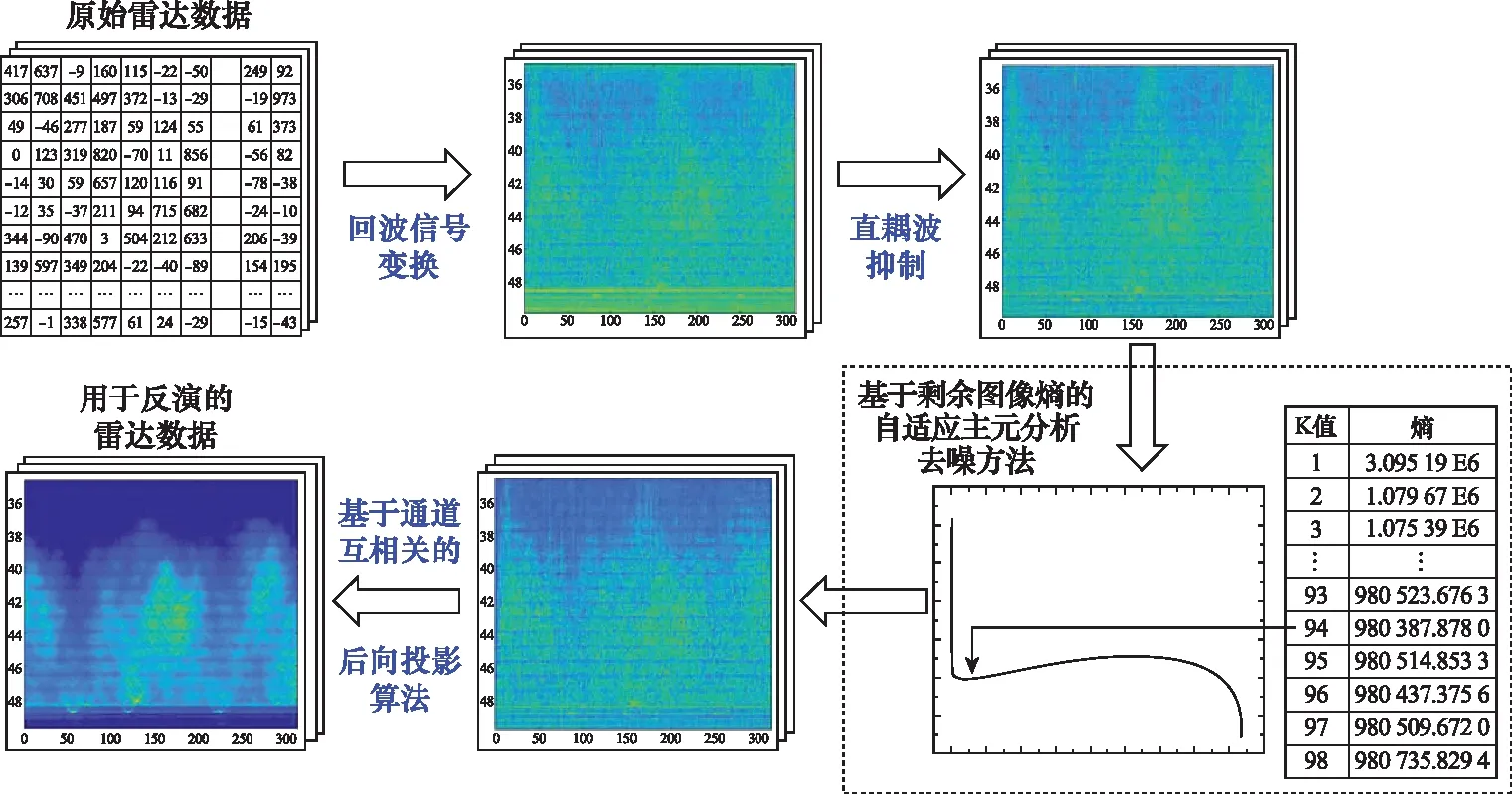
圖3 數據處理方法流程圖
2.1 回波信號變換
雷達發射高斯信號,信號形式如下:
(1)
式中:A表示信號幅度;t表示時間變量;tR表示目標位置對應的采樣時刻;f0表示信號的中心頻率。根據信號形式進行模擬分析,模擬結果如圖4所示。
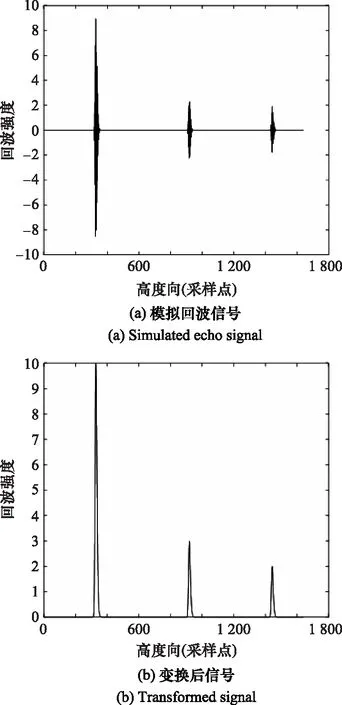
圖4 雷達信號模擬分析
可以看出,將信號直接進行希爾伯特變換,即可得到分辨率較好的尖脈沖,同時獲得雷達復數數據。圖5(a)和圖5(b)分別為1號航線和2號航線獲取的原始實數數據經回波信號變換后得到的雷達復數圖像數據。其中,橫坐標為水平測量點的位置,每個測量點間隔0.236 m;縱坐標為高度方向采樣點位置,零點表示信號截斷位置,每個采樣點間隔為0.01 m。
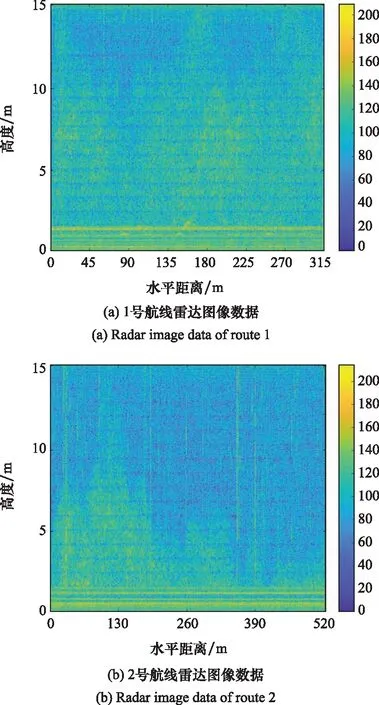
圖5 雷達復數圖像數據
2.2 直耦波抑制
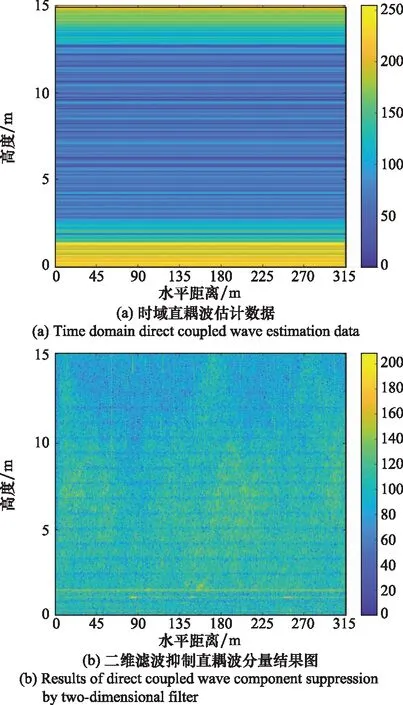
圖6 二維濾波法抑制直耦波
2.3 基于剩余圖像熵的自適應主元分析去噪方法
經直耦波抑制之后的雷達信號仍然摻雜著噪聲的干擾,這些噪聲會對雷達圖像的分辨率造成影響,掩蓋圖像的細節信息,從而降低植被高度反演精度。主元分析法是一種線性的子空間投影算法,該方法基于最小均方誤差準則,能夠有效地壓制噪聲能量,提高信噪比[26-27]。目前,主元的選擇方法主要采用經驗值法[28]和特征能量百分比法[29],這兩種方法受主觀影響較大,穩定性差,難以實現主元的自主選擇。本文針對于上述應用場景,提出一種聯合剩余圖像熵與奇異值分解的自適應主元分析法抑制噪聲,以去除前k個主元之后剩余圖像熵值達到局部最小值為準則,實現主元的自主選擇,以達到最佳的去噪效果。
假設SR∈CM×N代表去除直耦波之后雷達數據,SR的奇異值分解表示為
(2)

(3)

(4)

ω(k)=Ω(W(k)),k=1,2,…,Q
(5)
以1號航線獲得的無人機雷達數據為例,通過式(5)得到熵值ω(k)隨k值變化,如圖7所示。可以看出,一開始圖像能量主要包含目標能量和噪聲能量,且大部分能量主要集中在目標能量部分,整幅圖像的能量較分散,熵值較大,隨著k值增大,目標部分的能量被不斷去除,整幅圖像的能量趨于集中,熵值逐漸減小。當k=94 時,ω(k)達到局部最小值,此時可以認為目標能量全部被去除,整幅圖像的能量都集中在噪聲部分,即第94個主元之后所對應的信號全為噪聲信號,那么選擇第1~93個主元重構該圖像,能夠保留目標信息且達到較好的去噪效果。
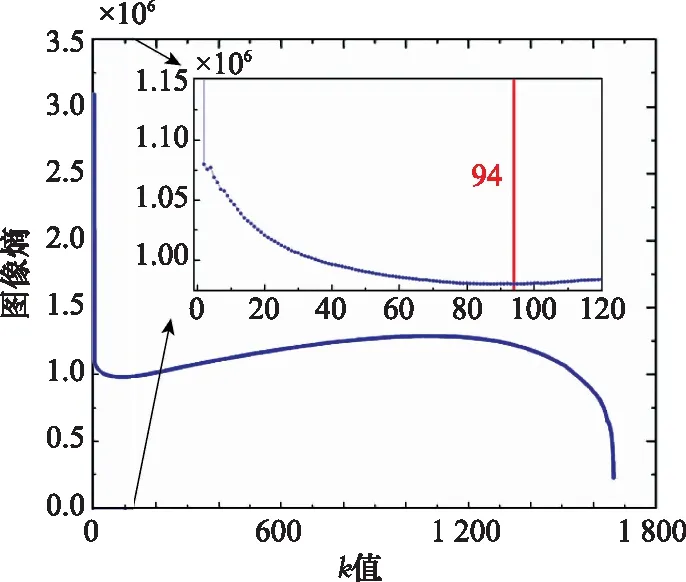
圖7 熵值隨k值變化
圖8為1號航線無人機雷達數據去噪結果,對比圖6(b)可以看出,大量的背景噪聲得到了有效去除,同時保留了目標的邊緣和細節特征,目標信號更加清晰。該方法解決了傳統主元分析法在噪聲抑制中主元依賴人工選擇、閾值不穩定的問題,避免了針對不同數據需人機交互判定主元數目帶來的麻煩,具有一定的魯棒性,能夠適應不同的應用場景。
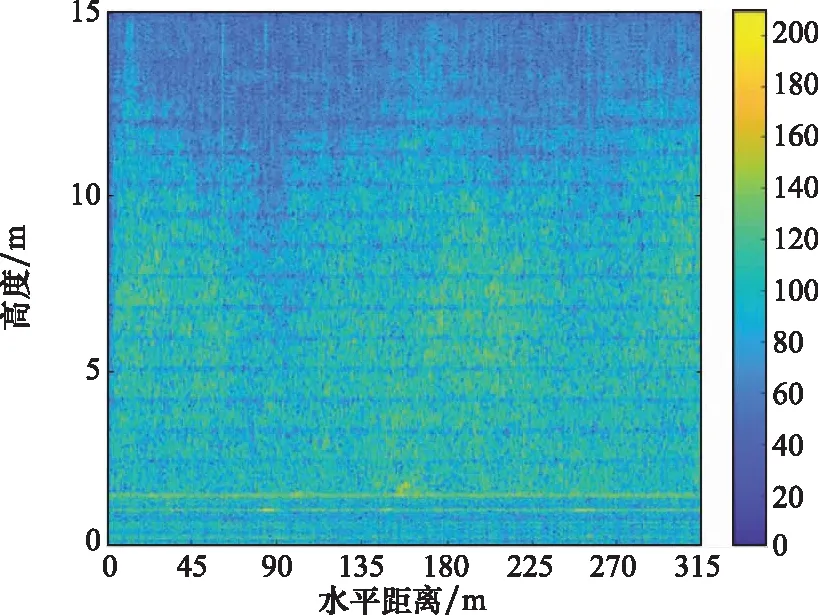
圖8 基于剩余圖像熵的自適應主元分析法去噪結果
2.4 基于通道互相關的后向投影算法
后向投影算法是一種時域重建目標影像的方法,其核心是補償每一成像點相對于每一時刻雷達天線位置的相位,并將該點對應的合成孔徑內所有回波數據相干疊加,實現雷達方位向的高分辨率成像。由于本系統雷達天線具有寬視角的特點,所以其在每個時延位置處收集到的散射響應包含了天線照射范圍內所有點在該時延位置處的響應,容易出現雜波干擾能量較大的問題。根據各接收通道之間目標信號和雜波相關性不同這一特性,利用后向投影算法處理時對各接收通道之間回波信號進行互相關運算可以消除雜波的干擾,增強目標響應[32]。本文利用基于互相關信息的后向投影算法對噪聲抑制后的數據進行處理,如圖9所示,與圖8相比,雜波的影響得到了有效地抑制,目標信號與背景的對比度獲得了較大提升,提高了目標信息的識別能力。
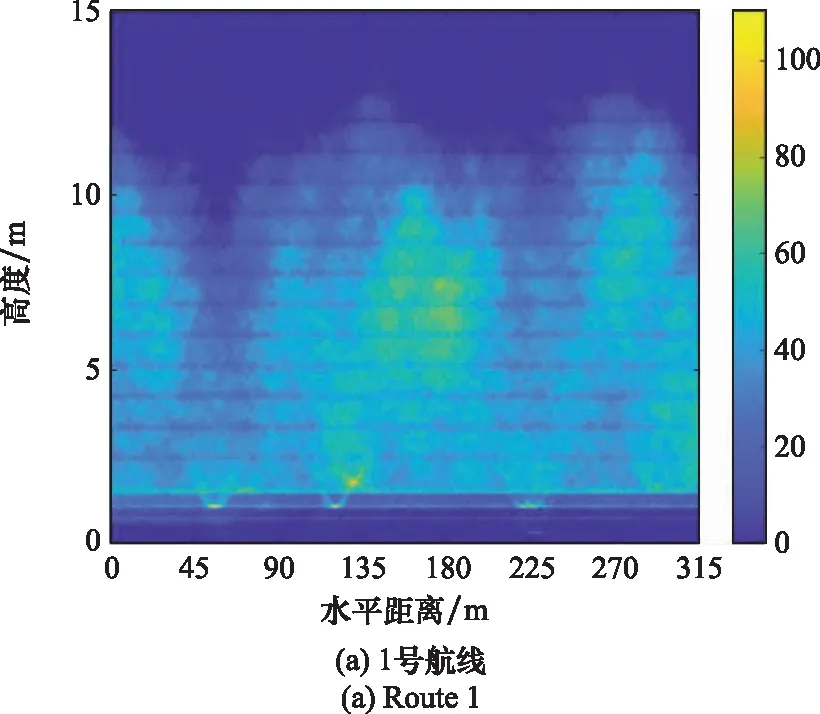
圖9 不同航線基于互相關信息的后向投影算法處理結果圖
3 植被冠層提取與驗證
3.1 植被散射機制分析與冠層提取
當電磁波照射到隨機分布,截面較大的體散射單元上時,雖然每個散射單元都有各自方向的散射響應,但總體來看其取向是隨機的,后向散射回波在各個方向均勻分布。但當電磁波照射到光滑表面上時則會發生鏡面反射,散射體的回波信號只在一個方向疊加,其他方向相互抵消,雷達幾乎無法接收到后向散射回波。所以,雷達入射到較為平靜的水體發生的主要為鏡面反射,水體雷達后向散射系數幾乎為0,入射到水面上的電磁波后向散射回波也近乎為0,但是水面上的植被冠層將發生體散射,加之水面與樹干之間的二次散射,將導致植被區域的散射較水體散射強很多,如圖10所示。因此,根據回波信號在高度向上迅速衰減這一特性,可以識別出林下地表所對應的高程值,從而直接從無人機雷達圖像中反演出植被高度,避免了應用物理模型的先驗信息。
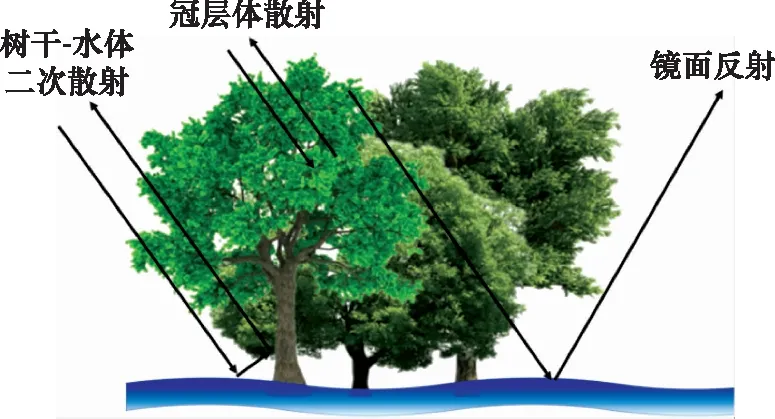
圖10 植被散射機制示意圖
根據上述分析,雷達接收到的回波信號中,來自植被體散射的信號能量較強。基于回波能量在高度向上的分布形狀,可以估測該區域植被的冠層高度。將雷達圖像上回波能量分布分為相位中心區、功率損失區、噪聲區3個區域[33],來自植被的回波能量絕大多數集中在相位中心區,損失區的能量由于植被密度的降低而逐漸減弱,繼續沿高度向向上的能量基本來自噪聲。所以,可以通過識別損失區和噪聲區的分界位置提取冠層高度。從圖9可以看出,經過基于通道互相關的后向投影算法處理之后,噪聲區的能量已得到較好的壓制。在雷達圖像上應用Sobel邊緣檢測算子提取回波信號輪廓線所對應的高度值,即可獲取到被測區域的植被冠層高度,如圖11所示,圖中也可以發現回波信號在高度向上約1.5 m處迅速衰減,表明了水體位置。
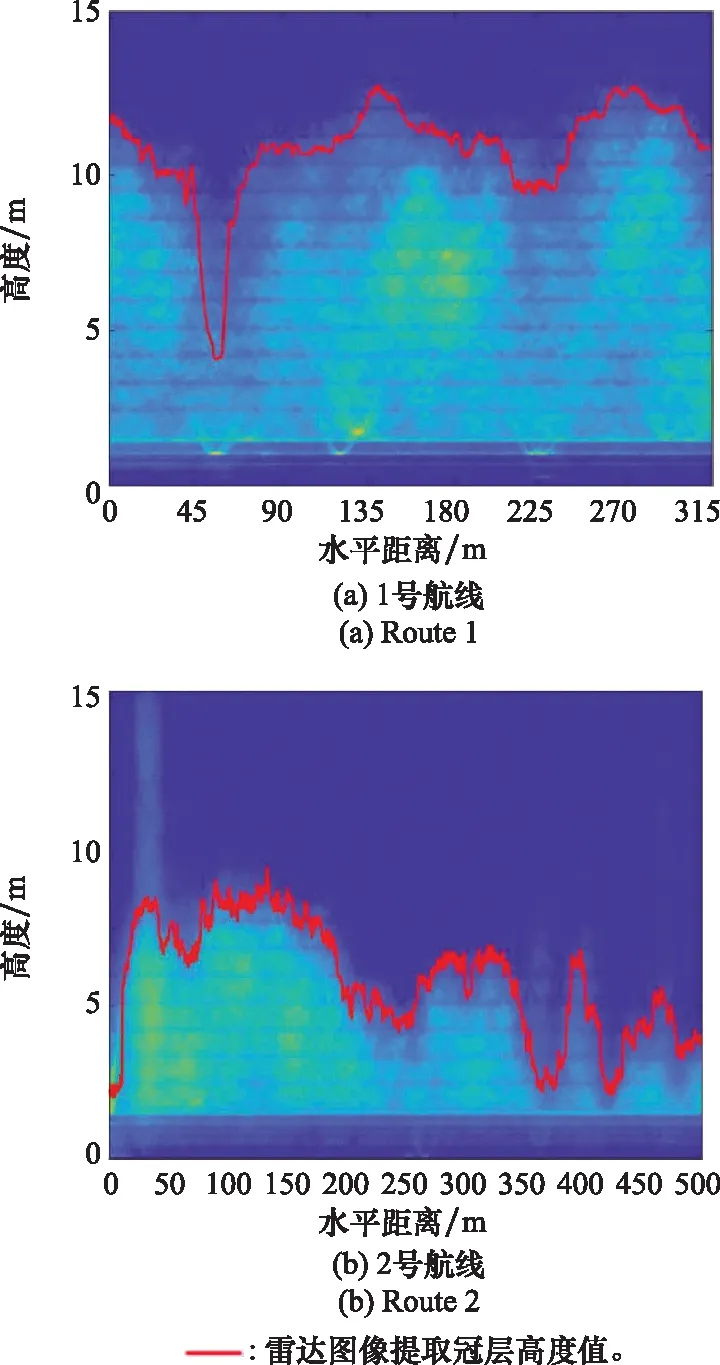
圖11 不同航線雷達數據植被冠層高度反演結果
3.2 精度驗證
開展地面植被高度測量時,由于紅樹林大都生長在潮間帶的淺灘和淤泥等測量人員難以進入的區域中,獲得大面積的地面實測數據較為困難,所以在進行雷達測量的同時,僅對部分樹高采用地面激光測高儀采集了樹高實測值。另外一部分植被根系位于海面以下的區域采用數字地表模型作為植被高度驗證數據,對基于無人機雷達數據提取到的樹高進行驗證,并以相關系數R、均方根誤差(root mean squared error,RMSE)作為定量評價指標,具體公式如下:
(6)
(7)

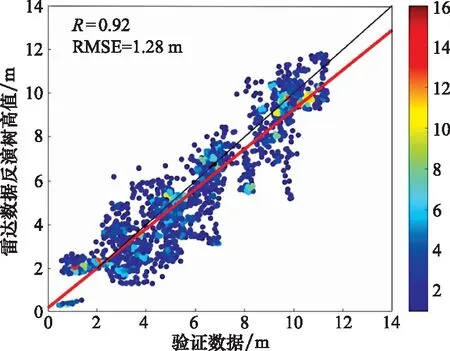
圖12 無人機雷達數據反演植被高度的精度
4 結 論
考慮到現有的植被高度遙感反演方法存在模型復雜、數據獲取難度大等問題,本文設計了一種輕小型無人機雷達系統,并提出利用該系統反演植被高度信息的方法,利用飛行實驗對該方法的有效性進行了評估。無人機雷達數據獲取系統采用了模塊化設計,具備高度集成、輕量化、高可靠性等特點;在雷達數據處理方面,采用二維濾波和主元分析法對雜波及噪聲進行抑制,提出基于剩余圖像熵的主元自動選擇方法,以解決傳統經驗法和能量百分比法主元選擇不穩定的問題,并利用基于互相關信息的后向投影算法進一步減弱雜波的影響,得到了更高精度的植被高度反演結果。驗證結果表明,該方法提取得到的植被高度能夠具有較高的精度。系統與其他方法相比,數據表現形式更加直觀、模型更加簡單,只需一次航過便可反演得到植被高度值,降低了數據獲取成本,為反演高時空分辨率、高精度的植被高度信息提供了新的思路。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06