光電測量方法在盾構隧道收斂監測中的可行性研究
2022-11-27 07:54:50趙寧寧王嘉偉尤相駿賀子瑜姜雷雷
鐵道標準設計 2022年12期
趙寧寧,王嘉偉,蘆 斌,尤相駿,賀子瑜,姜雷雷
(1.寧波市軌道交通集團有限公司,寧波 315101; 2.浙江華展工程研究設計院有限公司,寧波 315012)
引言
城市軌道交通在人們的日常生活中占據著極其重要的地位,保障軌道交通安全平穩運營關系到國家和人民的生命財產安全,因此,在地鐵隧道運營過程中,需要定期對隧道結構進行安全質量評估,以確保地鐵的安全運行[1-2]。由于外界因素干擾以及自然地層變形,地鐵隧道結構可能產生縱向及橫向變形,超過變形限差,會引發一定的災害,需要定期對隧道進行監測[3-5]。
近年來,隨著三維激光掃描技術的發展,地面三維激光掃描技術以其獨特的優勢得到快速應用,可以獲取大面積、高精度的建構筑物點云數據,并為后續的建筑物建模提供基礎數據[6-8]。三維激光掃描技術可以獲取高精度點云數據,能夠全面反映隧道內建筑的細節信息,在一定程度上可以避免傳統變形監測中的人為因素以及其他環境因素[9-11]。
基于三維激光掃描技術在地鐵隧道內的監測應用,國內外學者已有一定研究。文獻[12]提出基于空間圓柱迭代擬合的隧道點云數據提取中軸線的算法,該算法的中軸線定位點提取誤差為±3 mm;文獻[13]提出一種基于點云的隧道三維建模算法,并應用到單空間隧道中,獲得隧道的相對變形;文獻[14]從地鐵隧道數據采集、三維模型建立、數據處理、成果輸出等方面加以分析,闡述快速獲得隧道管片變形量的一種方法;文獻[15]利用GRP 5000隧道動態掃描系統來實現隧道的變形監測,并利用全站儀檢驗其監測結果的精度,相較于傳統隧道變形監測方法,移動三維激光掃描技術具有數據采集效率高、測量精度不受外界影響,隧道變形分析全面等優勢,更適用于監測環境惡劣,天窗時間短的運營地鐵隧道;文獻[16]采用德國Z+F 9012相位式三維激光掃描系統,提出一種全新的軌道交通運營期隧道監測方案,通過與傳統監測成果的對比分析表明,移動三維激光測量系統在滿足監測精度要求情況下,能夠提高監測效率、增強安全保障,符合我國日益增長的地鐵隧道監測需求。為確保地鐵的安全運營,利用瑞士Amberg Profiler5033(德國Z+F 5010的OEM產品)相位式三維激光掃描系統、徠卡TS60全站儀以及徠卡D2手持測距儀等儀器獲取圓形盾構隧道橫徑數據,并對比分析3種方法隧道橫徑測量值的差異。
1 三維激光掃描數據獲取
1.1 使用設備與技術參數
三維激光掃描技術通過激光掃描測量方法,快速獲取被測對象表面的三維坐標信息及其他細節信息[17-18]。本文采用Amberg Profiler 5033三維激光掃描儀,具體參數見表1,激光雷達隧道測量檢測軟件(LTIS,Lidar Tunnel Inspection System)采用絕對定位法(APM,Absolute Positioning Method)靜態設站方式獲取與隧道設計施工坐標系一致的隧道三維掃描激光灰度點云。
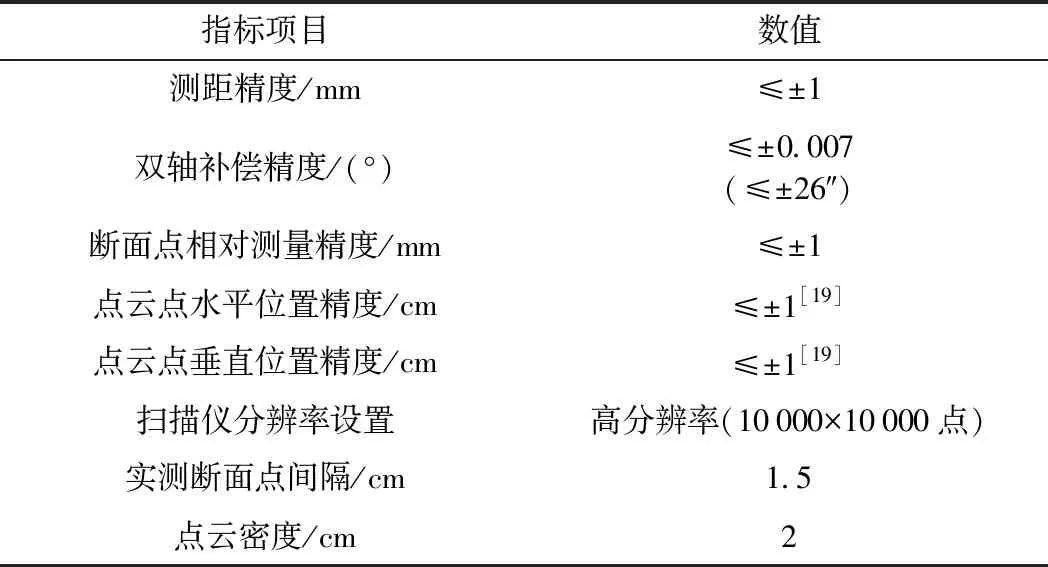
表1 掃描儀參數指標
1.2 絕對定位法靜態設站三維掃描
基于地鐵隧道CPⅢ控制點,利用徠卡TS60全站儀自由設站法設站定向后,測得掃描儀兩個棱鏡,以及靶球中心的CPⅢ坐標系坐標。在掃描儀工作前,由司鏡人員安置全站儀棱鏡、掃描儀棱鏡及靶球,安置位置如圖1所示。作業時,掃描儀司儀人員架設整平好掃描儀,將掃描儀基座上的2個棱鏡對準全站儀方向,然后將半球棱鏡的半球一面朝向掃描儀,棱鏡的一面朝向全站儀,即可開始掃描。此時面朝隧道大里程方向,位于掃描儀基座左手的棱鏡稱為1號棱鏡,右手棱鏡為2號棱鏡,半球棱鏡為3號棱鏡(此測量點號命名規則為便于內業使用軟件中的點云APM定位功能,對測站點云批量自動傳遞CPⅢ坐標系坐標而無需點云拼接)[19]。
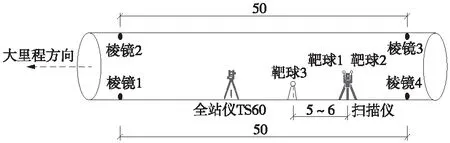
圖1 絕對定位法靜態掃描現場布置(單位:m)
2 點云數據處理
2.1 技術流程
外業點云數據采集完成后,點云和全站儀測得的每個掃描測站兩個棱鏡和靶球中心的坐標數據導入激光雷達隧道測量檢測軟件(LTIS),先完成點云絕對定位,再進行隧道軸線輸入、點云線路里程投影、根據線路里程提取斷面、斷面橢圓擬合與雜點過濾,然后導出斷面點數據。最后使用斷面變形分析軟件對上一步處理導出斷面實測點云進行橢圓擬合,提取實測斷面0°、45°、135°方向軸徑特征點并計算這些軸徑數值[20],操作流程如圖2所示。
2.2 斷面提取
本文采用LTIS軟件按照線路設計軸線截取管環環中+0.1 m位置點云正交斷面切片(切片里程方向厚度為2 cm)投影到切片中心里程處形成點云“壓薄”后的二維斷面圖,并用軟件過濾非環片結構雜點,輸出雜點過濾后的實測vs設計點云斷面效果如圖3所示。
使用斷面變形分析軟件,斷面測點圖(包含0°、45°、135°內徑及隧道拱頂最高點與橫徑左右端點連線距離)、自動擬合橢圓生成橢圓擬合斷面圖和斷面點位變形曲線圖,如圖4所示。
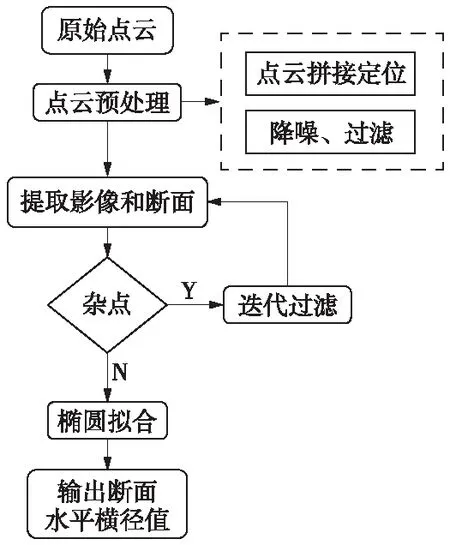
圖2 點云處理流程
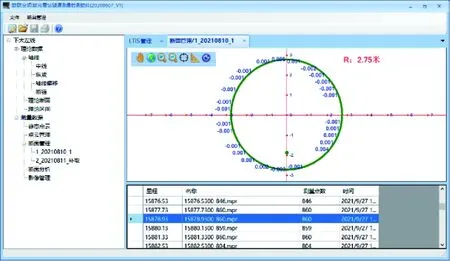
圖3 點云斷面過濾后效果
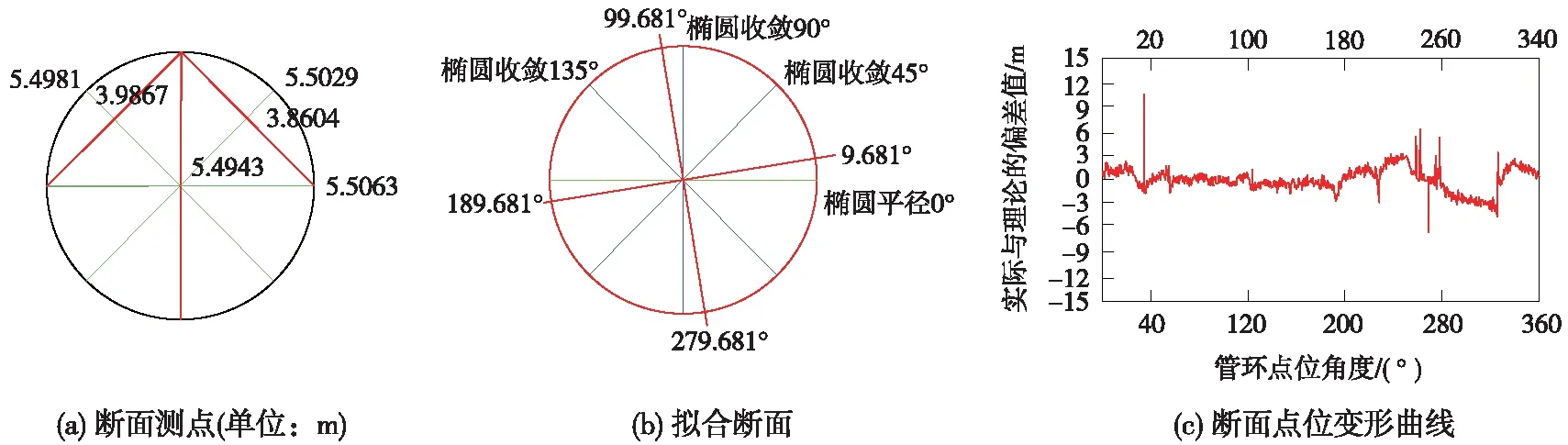
圖4 自動擬合橢圓點云成果
通過圖4可以判斷軟件擬合橢圓的質量,以及輸出隧道斷面圖和橫徑值等相關幾何特征點提取、特征值計算與橢圓擬合成果。
3 三種方法測量結果對比與分析
3.1 全站儀與測距儀獲取橫徑值
使用徠卡TS60全站儀免棱鏡測量模式和徠卡D2激光測距儀測量隧道橫徑值與三維激光掃描獲得結果進行對比。其中全站儀免棱鏡測距精度為:±(2 mm+2 ppm),測距儀標稱精度為±1 mm。
利用全站儀和測距儀測量橫徑值應同時進行。將全站儀架設于某一環片正中間位置,基于全站儀自帶的點到點免棱鏡測距功能,獲取隧道橫徑(一般選取兩側環片注漿孔的位置),并標記該測點位置;將測距儀緊貼于環片中間管壁上(全站儀測量標記的位置),每次測量應進行實測精度符合性檢查,并應進行3次獨立測量,且3次獨立測量較差小于測距標稱精度的2倍(即±2.0 mm),記錄3次獨立測量的結果。
3.2 三種方法測量結果對比分析
本次選取某城市圓形盾構區間進行數據采集,對數據進行預處理,剔除粗差。


表2 激光掃描儀與全站儀收斂變形差異值分析

表3 激光掃描儀與測距儀收斂變形差異值分析

表4 全站儀與測距儀收斂變形差異值分析
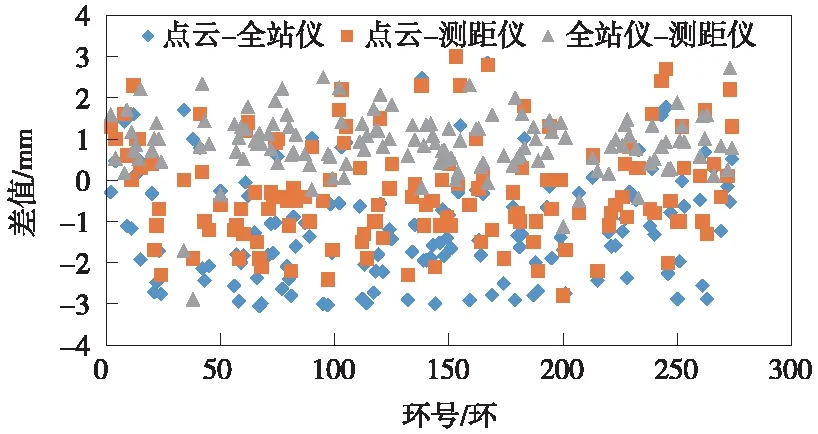
圖5 三者收斂差異值點位
圖7為三者之間差異值的正態分布,由圖7可知,針對三者差異值均在±3 mm進行統計,掃描儀與測距儀差異值均值為-0.2 mm,標準差為1.26,掃描儀與全站儀差異值均值為-1.1 mm,標準差為1.37,全站儀與測距儀差異值均值為0.9 mm,標準差為0.74。由此可知:三維激光掃描儀和測距儀直接測量的橫徑值差異最小,且分布區間較為集中;三維激光掃描儀與全站儀免棱鏡測量的橫徑值差異較為分散;全站儀免棱鏡測量與測距儀測量的橫徑值差異較小,分布區間較為集中。經過對比分析隧道橫徑值,可知三維激光掃描儀和測距儀測量效果優于全站儀免棱鏡測量。

圖6 三者收斂差異值區間分布餅狀圖(單位:mm)
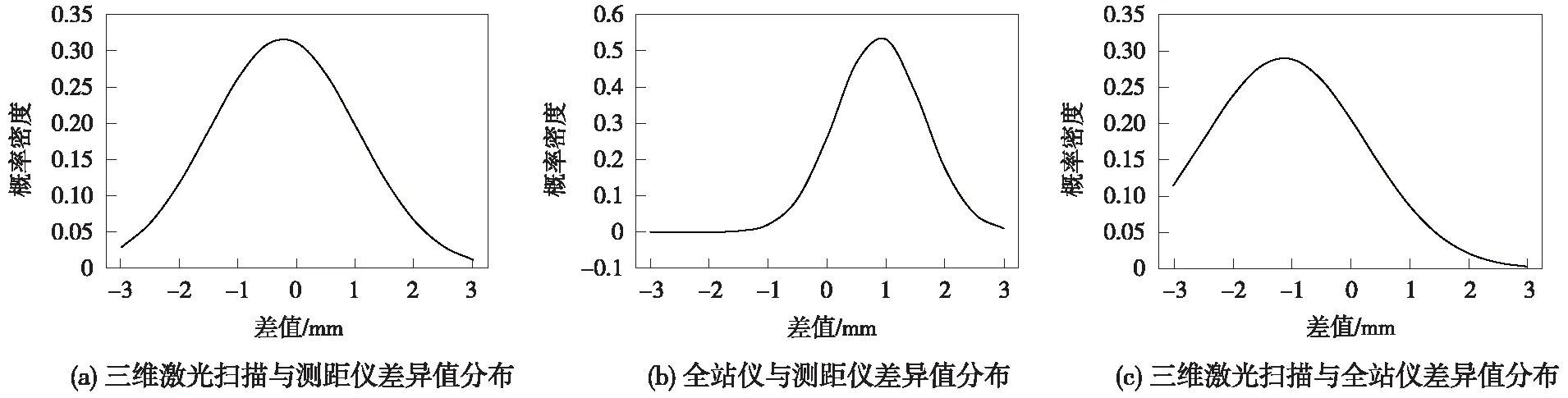
圖7 三者之間差異值的正態分布
通過對比3種隧道橫徑測量值的差異,分析得出各測量方法均可用于地鐵隧道收斂變形監測。經過分析3種差異值可知,另外兩種方法與全站儀免棱鏡測量方法產生的差異值較大。這是由于TS60全站儀的亞毫米級精度是基于棱鏡測量模式,而不是免棱鏡測量模式。TS60全站儀免棱鏡模式測距精度為2 mm+2 ppm,低于三維激光掃描儀與手持測距儀的1 mm測距精度。
4 結語
本實驗以某城市地鐵圓形盾構區間隧道為試驗對象,采用三維激光掃描儀、徠卡TS60全站儀和徠卡D2手持測距儀等3種儀器獲取地鐵隧道橫徑值,并對其結果進行對比分析。試驗研究結果表明:3種測量方法均可以滿足地鐵隧道收斂變形監測指標要求;針對測量誤差在±3 mm內,三維激光掃描儀和測距儀直接測量的橫徑值差異最小,且分布區間較為集中;三維激光掃描儀與全站儀免棱鏡測量的橫徑值差異較為分散;全站儀免棱鏡測量與測距儀測量的橫徑值差異較小,分布區間較為集中。綜合可知:三維激光掃描和測距儀測量效果優于全站儀免棱鏡測量;三維激光掃描和手持測距儀兩種隧道橫徑測量方法在技術與精度上是完全可行并且可靠的。
猜你喜歡
北京測繪(2020年12期)2020-12-29 01:37:18
中華詩詞(2020年1期)2020-09-21 09:24:52
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
小學生作文(中高年級適用)(2018年5期)2018-06-11 01:22:56
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中學生數理化·七年級數學人教版(2017年11期)2017-04-23 07:18:00
數學大王·中高年級(2016年12期)2016-12-26 21:37:36
電測與儀表(2016年9期)2016-04-12 00:29:52
