面向任務的載人潛水器人機交互信息結構分析
2022-12-14 07:08:24余隋懷陳登凱朱夢雅
哈爾濱工業大學學報 2022年12期
王 卉,余隋懷,陳登凱,葉 聰,張 偉,朱夢雅
(1.工業設計與人機工效工業和信息化部重點實驗室(西北工業大學),西安 710072;2.中國船舶科學研究中心,江蘇 無錫 214000)
載人潛水器駕駛艙系統結構復雜,各子系統相互關聯,潛器駕駛作業過程中潛航員除機械操縱外,還要對艙室內任務相關各類信息資源進行管理與監控,是一個密集人機交互過程[1]。由于長久的地面生活,人們習慣相對于水平面的視距判斷,在視域有限、地況復雜的深海環境下進行立體空間航向、航距、避碰等信息的準確判斷較為困難,為潛航員任務信息處理帶來了風險與挑戰[2]。因此研究載人潛水器潛航員認知內面向任務的人機交互信息結構,對優化人機交互過程具有重要意義。
目前載人潛水器相關研究多側重于材料、結構及機械性能等方面[3-5],在人因效能方面,有研究從生理舒適性角度,通過優化艙內物理環境來提升人因效能,例如張帥等[6]針對深海載人潛水器強約束條件下艙室空間舒適性,提出基于虛擬仿真技術的艙室可視化空間舒適性多源復合評估方法。李洋洋等[7]對人員下肢循環與肌肉疲勞展開研究,以改善潛航員生理舒適性;或從潛航員腦力負荷與信息認知角度出發,設計實驗研究不同任務環境下潛航員腦力負荷。例如石路等[8]通過分析不同界面位置下人員行為學指標和眼動數據,為艙室界面設計提供參考。殷昊翔等[9]模擬駕駛作業對潛航員腦力負荷影響,為潛航員的實際訓練提供參考。但較少有研究從引起潛航員認知負荷的根源,即實際任務過程中潛航員對交互信息的認知與處理的角度開展人因相關研究。
因此本文從多要素復雜系統分析的角度,提出面向任務的載人潛水器人機交互信息結構分析方法,構建潛航員認知基礎上的載人潛水器人機交互信息系統多層遞階結構模型,從模型結構特征、要素層級關系、影響脈絡及權重等方面進行討論,為深入分析潛航員對任務相關交互信息的認知與處理,合理化人機交互過程提供理論依據。
1 面向任務的載人潛水器人機交互信息結構分析方法
從直觀角度看,復雜系統可劃分為復雜拓撲網絡系統,如電網系統[10]、交通運輸網[11]等,和可用拓撲結構描述的無顯著網絡特征復雜系統,即載人潛水器駕駛艙一類的艙室人機交互信息系統[12]。從多要素復雜系統的視角審視駕駛艙人機交互信息空間為載人潛水器人機交互信息處理過程研究提供了更多的研究方法與途徑。
載人潛水器駕駛艙任務相關人機交互信息要素繁多且要素間關系復雜多變,為盡可能還原實際任務中潛航員信息處理過程,克服因缺乏客觀理論依據帶來的信息獲取偏差,本文引入決策階梯模型(Decision ladder,DL)作為獲取任務信息要素及關系的模板。DL是認知任務分析(Cognitive work analysis,CWA)方法中的重要模型,它將用戶對任務信息的處理視為一個建設性過程[13],并被廣泛應用于潛艇、飛機、汽車等駕駛艙等安全關鍵人機系統決策任務分析中,被作為記錄決策任務信息認知序列的工具[14]。因此,本文借助DL識別決策任務相關信息的優勢,依據實際任務流程規范獲取載人潛水器任務相關人機交互信息要素及要素關系。
復雜系統要素定量分析主要有因子分析法、層次分析法、主成分分析法、實驗室決策分析方法(Decision-making trial and evaluation laboratory,DEMATEL)、解釋結構模型(Interpretative structural modeling method,ISM)法等,與其他方法相比,DEMATEL-ISM方法結合了DEMATEL在區分要素屬性特征、計算要素間綜合影響關系方面的優勢及ISM層次劃分功能,可有效依據要素間關系[15],得到結構明確,脈絡清晰的層級結構[16],滿足本文對人機交互信息結構的分析需求。由已有DEMATEL-ISM相關研究可以看出,該方法在可達矩陣計算中,較多的可達矩陣判別式模糊了要素間的影響程度,且其修正因子的計算,在簡化結構的同時導致了系統要素及關系的缺失,無法體現出各系統組成要素間因果影響脈絡及致因程度。
因此,本文深入挖掘DL、DEMATEL及ISM方法在處理復雜系統要素及要素間關系的優勢,提出基于DL-DEMATEL-ISM集成方法的載人潛水器人機交互信息結構研究架構,以某任務中海底環境信息、潛器狀態信息及任務相關信息為輸入,運用決策階梯模型結合潛航員實際任務過程中的信息需求與處理過程,建立載人潛水器人機交互信息要素關系矩陣,基于DEMATEL-ISM方法,改進整體影響矩陣閾值計算及可達矩陣判別式,運用對抗輪層級換抽取方法,并引入模糊算子對計算影響值骨架矩陣,最終得到面向任務的載人潛水器人機交互信息多層遞階結構模型,具體研究架構如圖1所示。
2 面向任務的載人潛水器人機交互信息結構分析過程
依據載人潛水器人機交互信息結構分析架構,結合DL、DEMATEL-ISM方法計算過程,得到本文研究流程,如圖2所示。
2.1 基于DL獲取人機交互信息要素及關系
2.1.1 人機交互信息要素獲取
DL反映了專家用戶執行任務時基于規則的行為過程,由任務活動(矩形)及活動信息結果(橢圓形)組成[17],可分為8項任務信息處理活動階段:任務激活、環境觀察、系統狀態判斷、系統備選狀態評估、系統選擇狀態評估、目標狀態確認、任務定義、任務流程[18],如圖3所示。

圖1 面向任務的載人潛水器人機交互信息系統結構分析架構

圖2 載人潛水器人機交互信息系統結構分析流程
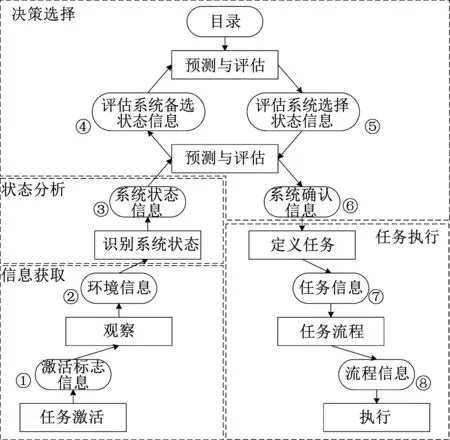
圖3 決策階梯
依據DL模型,邀請潛航員綜合任務操作規則及實際任務流程,構建某任務決策階梯,明確任務活動相關信息需求,將信息處理階段記為Pk(k=1,2,…,8),共8個階段。結合載人潛水器艙室人機交互面板及相關文件,將信息要素名稱修正為專業表達,得到面向任務的載人潛水器人機交互信息要素集Z={Z1,Z2,…,Z31},見表1。
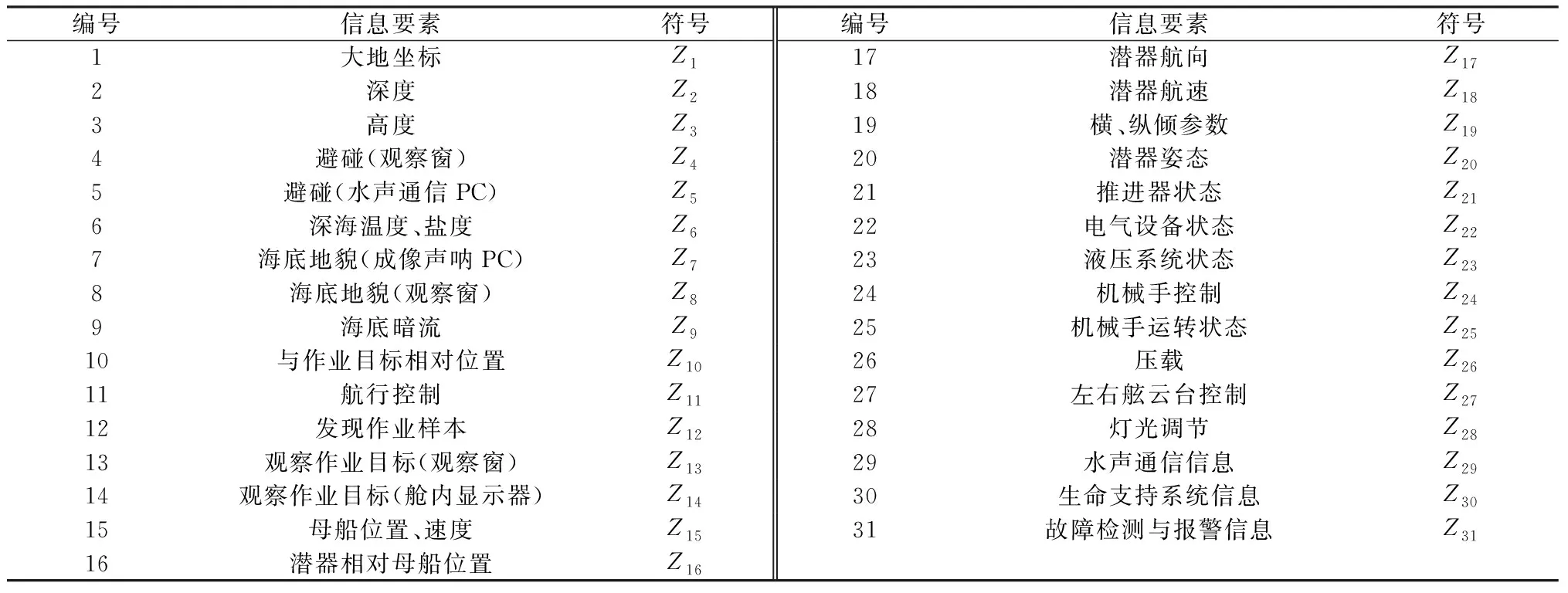
表1 任務環境下載人潛水器艙室人機交互信息要素
2.1.2 建立直接影響矩陣

(1)
遍歷階段Pk所有信息要素,依據式(2)得到該階段信息要素直接影響判斷矩陣Ak,即
(2)

綜合各階段要素影響關系,依據式(3)得到整個任務中信息要素直接影響矩陣A,即
(3)
式中,aij為Zi對Zj的直接影響值。
對直接影響矩陣A進行規范化處理得到規范化直接影響矩陣C,即
(4)

2.2 基于Dl-DEMATEL-ISM的人機交互信息綜合影響矩陣計算及分析
2.2.1 計算綜合影響矩陣
在復雜系統中,各要素間除直接影響外還存在相互波及等間接影響,結合DEMATEL-ISM集成方法,依據式(5),即
T=C(I-C)-1
(5)
得到人機交互信息綜合影響矩陣T,式中I為單位矩陣。
2.2.2 信息要素屬性分析
根據式(6)~(9)計算出該任務下信息要素Zi的原因度mi和中心度ni,即:
(6)
(7)
mi=fi+ei, (i=1,2,…,31)
(8)
ni=fi-ei, (i=1,2,…,31)
(9)
式中:影響度fi為綜合影響矩陣T中Zi所在行行和,被影響度ei為矩陣T中Zi所在列列和,信息要素特征值計算結果見表2。
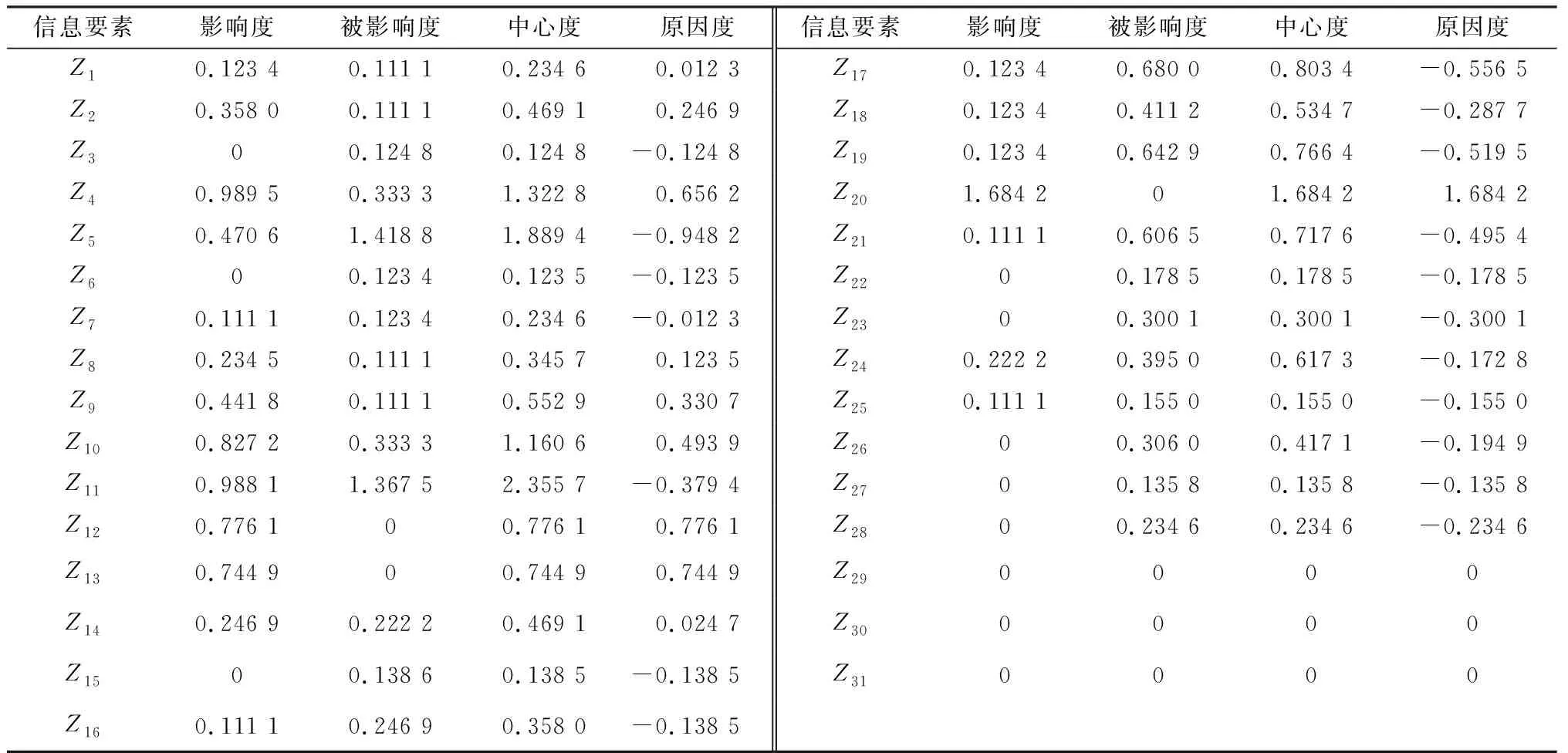
表2 載人潛水器人機交互信息要素DEMATEL分析結果
2.3 人機交互信息關系的可達矩陣計算及層級劃分
2.3.1 可達矩陣計算
在綜合影響矩陣T基礎上,依據式(10)得到整體影響矩陣H,即
H=I+T
(10)
式中,I為單位矩陣。
基于整體影響矩陣H,確定修正因子λ,以舍去指標間影響程度較小的值,簡化系統結構。
λ若取值過大,導致系統結構過于簡單,若取值過小,指標間關系過于復雜,結構表達不清晰。因此,為不影響信息要素完整性并保證系統結構清晰,運用無監督學習算法K-means對λ閾值集合進行聚類分析,參照李克特量級確定K均值聚類計算質心數k=5,依照“小、較小、一般、較大、大”5個等級進行組別劃分,得到閾值集合的類別預測及聚類中心值。依據聚類計算結果,確定修正因子λ取值為0.000 4、0.076 9、0.188 0、0.333 3、0.478 6,見表3。
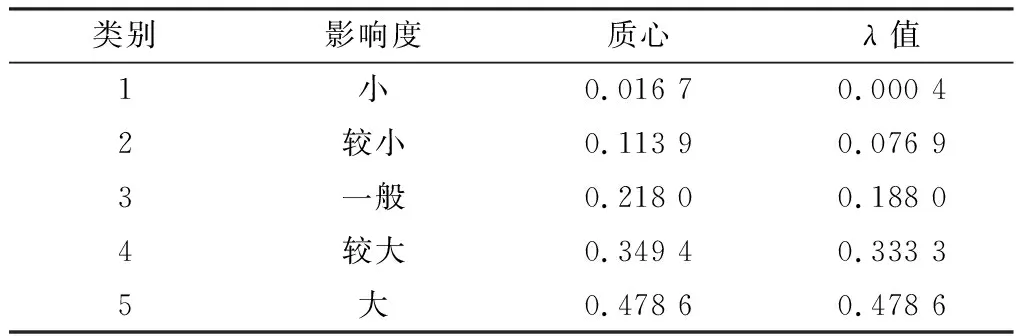
表3 可達矩陣修正因子計算結果
將修正因子帶入整體影響矩陣H,得到不同λ對應截距陣(λ=0時,截距陣為矩陣H)繪制各截距陣節點強度變化趨勢圖(圖4(a))及信息要素衰減圖(圖4(b)),如圖4所示。
由圖4可知,當λ為0.000 4時,其對應截距陣節點強度變化趨勢與λ=0時最為接近,當λ=0.076 9時二者極為接近,同時確保了信息要素的完整性,因此確定修正因子為0.076 9,通過式(11)計算得可達矩陣R=(rij)31×31,即
(11)
式中,hij、rij分別為整體影響矩陣H及可達矩陣R中Zi對Zj的影響程度。
2.3.2 人機交互信息要素層級劃分
按照式(12)~(14)求出信息要素的可達集M(Zi)、先行集N(Zi)和共同集O(Zi),即:
M(Zi)={Zj|aij≠0}
(12)
N(Zi)={Zj|aji≠0}
(13)
O(Zi)=M(Zi)∩N(Zi)
(14)
式中:M(Zi)為Zi直接或間接影響的信息要素集,
N(Zi)為直接或間接影響Zi的信息要素集。
為均衡層級結構,識別人機交互過程中的關鍵要素,提出綜合對抗輪換層級要素抽取方法,即:
li={Zj|Zj∈Z-l1-…-li-1,M(Zj)=O(Zj)}
(15)
li={Zj|Zj∈Z-l1-…-li-1,N(Zj)=O(Zj)}
(16)
式中,li為第i次抽取所得要素集合,以結果-原因輪換抽取方法為例,首先依據式(15),抽取l1要素做為結果屬性第1層指標,從可達矩陣中劃除l1指標,依據式(16),抽取l2要素作為原因屬性第1層指標,以此輪換順序,直至所有要素被刪除,由底至頂依次記為L1、L2、L3、…。同理,以相反的輪換抽取順序求得原因-結果輪換層級劃分結果,見表4。
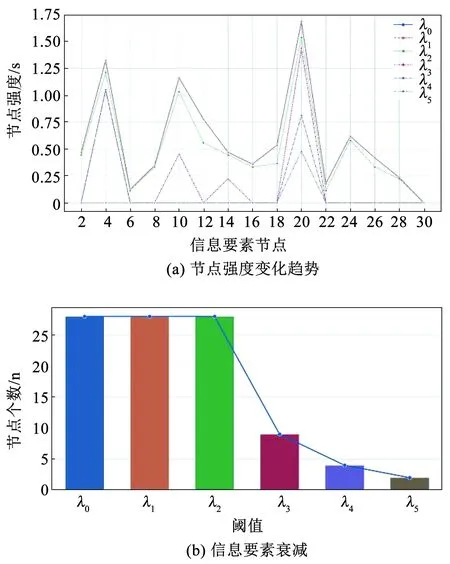
圖4 不同λ下的交互信息系統節點數與節點度計算結果

表4 載人潛水器人機交互信息層級劃分
2.4 載人潛水器人機交互信息層級結構模型構建
首先基于矩陣R,將要素及要素間關系視為拓撲結構節點及連邊,Zi所在行rij≠0的列要素Zj為Zi出邊終點,Zj所在列rij≠0的行要素Zi為Zj入邊起點,可達因子rij視為要素連邊權重,基于此繪制信息要素拓撲結構圖。
其次,依據表2以橢圓形表示原因屬性要素,以長方形表示結果屬性要素,以菱形表示活動要素,以*標記中心度較大信息要素。
然后,結合表4對拓撲圖進行層級劃分,得到載人潛水器人機交互信息系統層級結構模型。
對系統層級結構初始模型進行縮邊縮點處理,為避免縮點后信息要素及要素間關系的衰減,將回路要素視為一個節點,重構可達矩陣R1。
為保留要素間影響因子,引入模糊算子對——查德算子,依據縮邊公式(17),計算得矩陣R′的含影響值骨架矩陣S′,即
S′=R′-(R′-I)2
(17)
還原回路中信息要素間關系,得到全因素影響值骨架矩陣S。依據骨架矩陣S對初始交互信息層級結構模型進行縮邊處理,得到最終的載人潛水器人機交互信息層級結構模型。如圖5所示。

圖5 面向任務的載人潛水器人機交互信息系統層級結構模型
2.5 層級結構模型構建對比方案分析
與已有的基于DEMATEL-ISM方法的層級模型構建研究相關文獻的不同之處主要體現在:
1)整體影響矩陣的閾值λ計算。整體影響矩陣閾值的確定,是可達矩陣建立的關鍵,以實現在一定程度上簡化系統結構的同時,突出復雜網絡系統要素間主要關系的目標,決定著最終的層級結構模型。目前已有的對整體影響矩陣閾值確定的方法主要有以下幾種:
②以λ表示閾值,定義閾值λ=α+β,其中α、β分別為整體影響矩陣H中所有元素值的均值和標準差[20-21]。
③基于專家經驗與建議給出閾值λ的可取值,如設置λ為0.05、0.07、0.10、0.15等,再依據閾值確定的兩個原則,進行多次取值對比,分析不同閾值下的節點度,最終確定適合其相關研究的閾值[22-24]。
將上述確定閾值的方法應用在本文中,與本文所得閾值計算結果進行對比,分析結果見表5。
由表5可知,方法①所得截距陣,能保證節點度與節點強度相對穩定,但是只能夠保留DEMATEL計算結果中中心度較大的節點。方法②能夠剔除影響程度較低的節點間關系,保留較多節點,達到簡化網絡結構的目的,但連邊關系的剔除無法保證節點強度及節點度相對穩定。方法③同方法①一樣保留了中心度值較大節點,但同方法②一樣,連邊關系的剔除無法保證強度的相對穩定,且多次取值對比,增加的計算量。本文方法能夠在剔除節點間較小影響關系,簡化網絡結構的同時,保證節點的完整性,雖無法保證節點度值相對穩定,但結合對節點強度變化趨勢的分析(如圖4所示),可證明本文方法所得閾值下的整體影響截距陣中節點強度變化趨勢與原整體影響矩陣節點強度變化趨勢非常接近,可保證節點相對影響關系的穩定,且對于加權網絡,節點強度相較于節點度更能體現節點相對影響關系,一定程度上體現出本文閾值計算方法的可行性及優勢。
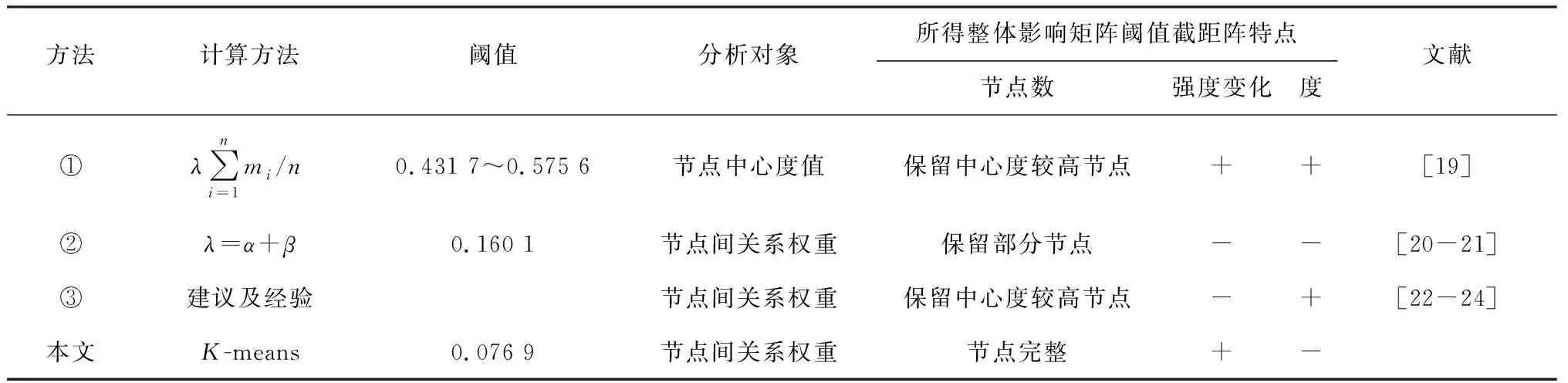
表5 整體影響矩陣閾值截距陣特點對比
2)含有影響程度權重值的層級模型構建。由人機交互信息關系的可達矩陣計算及層級劃分及載人潛水器人機交互信息層級結構模型構建對層級結構模型計算與構建過程可知,本文改進基于閾值的可達矩陣判別式,得到保留整體影響矩陣截距陣元素值的可達矩陣;依據所得可達矩陣,分析各節點的可達集與先行集,提出對抗輪換層級抽取方法進行要素層級劃分;最后采用適用于含影響值可達矩陣的最大、最小模糊算子,依據縮邊公式計算得到影響值骨架矩陣,構建出含影響因子層級結構模型。依據已有文獻[19,23]繪制未改進計算方法的層級結構模型,如圖6所示。
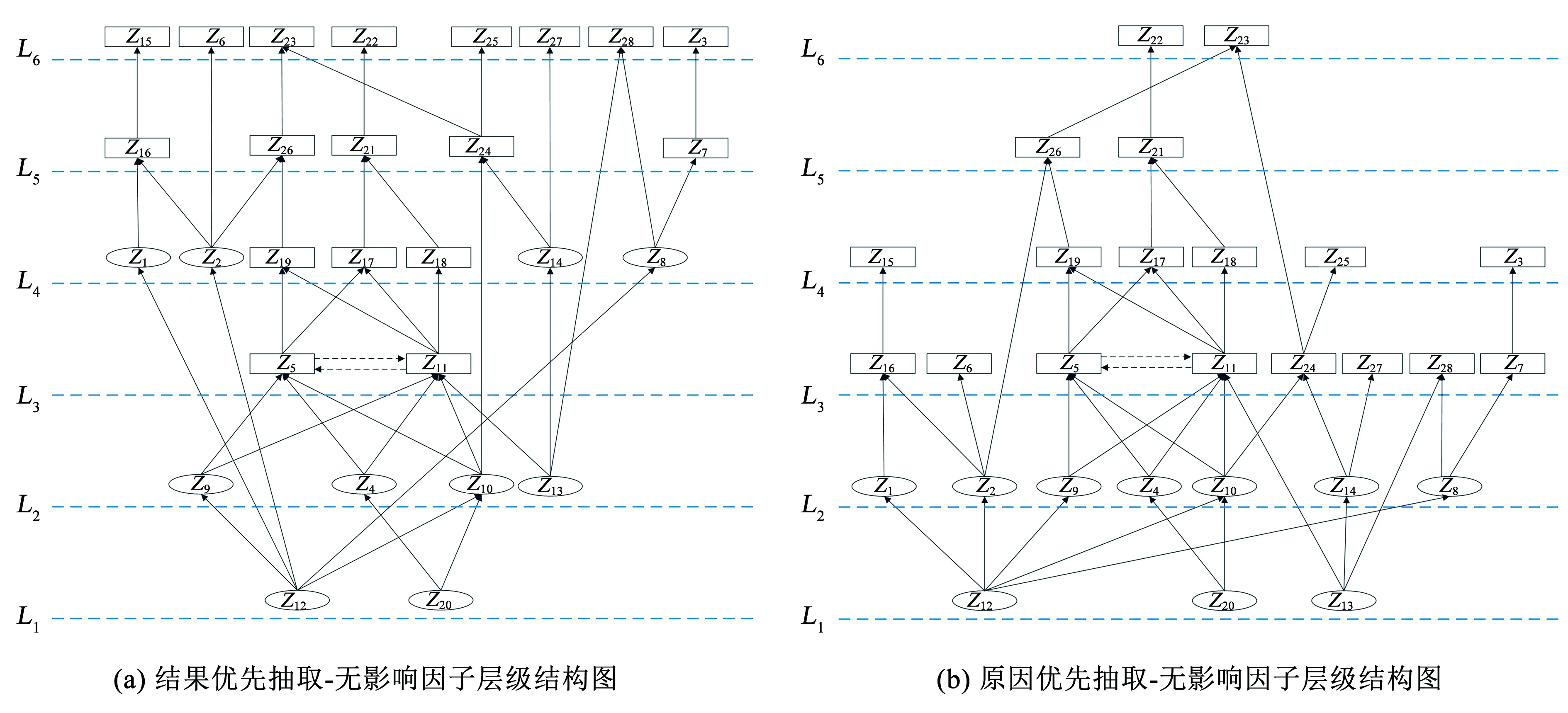
圖6 無影響因子層級結構模型圖
由上述結構模型與本文所得含影響因子層級結構模型對比可知,本文所得層級結構可很好的將更多的原因屬性要素至于底層,將結果屬性要素置于頂層,將關鍵過渡要素置于中間層,并識別出活動要素,同時保留整體影響矩陣中要素間影響值。所構建含影響權重層級結構模型賦予DEMATEL-ISM模型更多實踐意義,例如用于分析要素間存在的致因關系強度,識別要素間最短致因路徑等,更好地為指導交互信息界面設計提供理論依據。
3 載人潛水器人機交互信息層級結構模型分析
依據本文研究所得面向任務的載人潛水器人機交互信息系統層級結構模型,如圖5所示,對面向任務的載人潛水器人機交互信息層級模型的層級結構特征及要素間致因關系進行分析。
3.1 載人潛水器人機交互信息模型層級結構特征
結合各層級要素DEMATEL屬性值,可以看出,原因屬性信息要素主要分布于結構模型底端第L1、L2層,結果屬性要素主要分布于模型頂端L3~L6層。所得交互信息層級結構由底至頂層級原因屬性逐漸減弱,結果屬性逐漸增強。
結合各層級要素在實際任務中的語義特征,L1為激活交互過程的信息,如Z12發現作業樣本、Z13作業目標觀察及Z20潛器的姿態感知,可作為層級結構中的根本原因層;L2為引起潛器狀態發生變化外部情景信息,包含Z1潛器大地坐標、Z4避碰、Z8海底地貌、Z9海底暗流、Z10與作業目標相對位置、Z14作業目標觀察,為直接原因層;L3為潛航員為應對潛器系統外部環境而做出的行為反饋,如Z11航行控制,L3中信息要素Z5與Z11形成環路,為層級結構中所屬信息要素中心度均值最大的層級(ml3>ml1>ml4>ml2>ml5>ml6),作為原因屬性要素層級最直接行為反饋,是介于原因屬性層級及效應屬性層級之間的關鍵過渡信息層;L4~L6主要為航控引起的系統狀態變化參數信息,如Z17潛器航向、Z18航速、Z19橫、縱傾參數,Z21推進器狀態、Z22電氣設備參數等,可分為直接效應層L4以及終端效應層L5、L6。
綜上分析可知,L1、L2層級信息要素在交互信息系統中為主變因素,是潛航員交互行為發生的前因信息,在實際任務信息處理過程中,當前因信息的變化超出安全范圍時,則可能從根本上改變任務目標優先級,例如緊急情況下,由海底暗流等因素引起的避碰信息的突然變化,可能會直接中止當前任務的執行,改為確保人機系統安全為優先目標,潛航員對前因信息的及時感知,可以在一定程度上避免因“人為忽視”導致的緊急情況的發生;同理,L3~L6層層級信息要素在交互信息系統中作為因變要素,是潛航員交互行為發生的效應信息,對此類信息的掌握,可以使潛航員能夠及時感知行為反饋,提高察覺操作相關潛器系統及設備故障的概率,可在一定程度上避免因“操作不當”或“沒有及時察覺設備故障”導致的緊急情況發生,降低人機系統作業風險。
因此,從信息要素在潛航員任務信息認知處理過程所體現的原因-效應屬性的角度,提出對人機交互界面信息要素區分化顯示的建議,使潛航員在任務過程中及時定位引起系統狀態變化的原因所在,積極采取應對措施,同時及時捕捉到操作反饋信息,提高人機系統的安全及作業效能。
3.2 載人潛水器人機交互信息要素致因關系分析
在層間關系分析的基礎上,依據層級結構模型中要素間影響權重,結合各信息要素實際任務語義,分析各層級信息要素致因性及要素間的致因關系。
在L1信息要素中,Z20潛器姿態感知的出度權重和最大,其次為Z12發現作業樣本,其中,Z12標志著決策任務的開始,而Z20的重要致因性在于若潛航員感知到潛器姿態發生改變,則需將注意力從樣本觀察或其他當前任務中轉移至潛器姿態調整中,以確認潛器與外部環境相對距離穩定安全,是信息系統中最重要的致因要素;L2信息要素中,Z4避碰(觀察窗)出入度權重最高,Z4與出度信息Z5結合,指導潛航員掌握潛器避碰狀態,進一步影響航控。要素Z10與作業目標相對位置出入度值最大,決定著采樣任務的順利執行,是該層重要的致因要素。L3信息要素Z11出入度要素個數及權重皆為最高,是人機交互信息系統內最重要的致因信息要素,其出度信息為L4層要素Z17潛器航向、Z18潛器航速、Z19橫縱傾,是潛器系統實現精準航控,安全高效作業的保障。L5、L6中各要素出入度權重及度值較為均衡,為致因性較弱的效應要素。此外,對于出現于任務過程中,但沒有存在于信息要素致因關系中的活動要素Z29、Z30、Z31,是任務中必不可少但可以獨立于任務流程的存在,即當故障檢測與報警、水聲通信、生命支持系統狀態正常時,不會對原任務產生影響,若此類信息發生變化并超出安全閾值,會直接改變系統目標優先級。
對于含影響因子的層級結構模型,要素間的權重值代表了潛航員視角下任務信息要素間邏輯相關影響程度,即當信息要素A和B之間的權重大于A和C時,意味著信息要素A的變化會更多的引起B的變化,基于此思想,可識別出層級結構模型中目標信息的主要致因路徑,以關鍵信息要素Z11為例,其主要致因路徑為Z20潛器姿態→Z4避碰(觀察窗)/Z10與作業目標相對位置→Z11航行控制/Z5避碰(水聲通信PC)→Z17潛器航向/Z18潛器航速/Z19橫、縱傾→Z26壓載/Z21推進器狀態→Z22電氣設備狀態/Z23液壓系統狀態。主要致因路徑的識別,體現出致因路徑內信息要素在潛航員認知內的相關性關系,可用于指導人機交互界面信息元素相關性設計,例如,當任意信息要素發生變化時,可通過交互界面突出顯示其主要前因及后果信息要素,使潛航員能夠快速捕捉人機系統狀態或外部環境狀態的變化,以幫助潛航員快速理解所處情境,及時做出正確的操作反饋。
因此,從信息要素間存在的認知內邏輯影響相關性關系的角度,在以上提出的對原因-效應信息要素區分化顯示的基礎上,提出增強交互信息界面中處于同一致因路徑內原因-效應信息要素共現概率,增強潛航員對目標信息相關的前因及效應信息的監控程度,降低潛航員情境信息感知及搜尋成本,在一定程度上降低潛航員的信息認知處理負荷。
4 結 論
1)本文運用決策階梯DL,以潛航員實際任務信息處理過程為基礎建立人機交互信息要素初始關系矩陣,基于改進DEMATEL-ISM方法,進行一系列計算與分析,最終得到能夠定性表示交互信息要素相對邏輯位置、定量表示交互信息要素邏輯相關性的有向加權層級結構模型,并通過案例對比,證明了本文所提交互信息層級結構模型構建方法的合理性及優勢。
2)針對所得有向加權層級結構模型,結合潛航員實際任務信息處理過程,對人機交互信息系統中的信息要素及所屬層級的原因-效應屬性特征進行分析,識別出關鍵信息要素及層間致因關系。在此基礎上,進一步分析了各層級信息要素間的致因路徑。從層級信息屬性及層間信息致因性的角度,提出了相應的設計建議,為理解潛航員認知基礎上的人機交互信息處理過程,合理化載人潛水器駕駛艙人機交互信息界面設計提供了理論依據。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·八年級物理人教版(2022年3期)2022-03-16 05:55:08
當代陜西(2021年2期)2021-03-29 07:41:24
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華手工(2017年2期)2017-06-06 23:00:31
光學精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
