電磁慣性質量阻尼器對斜拉索的減振性能分析
2022-12-14 08:31:02謝靜,袁波,鄭勇
振動與沖擊 2022年23期
關鍵詞:振動
謝 靜, 袁 波, 鄭 勇
(貴州大學空間結構研究中心,貴州省結構工程重點實驗室,貴陽 550000)
隨著公路工程技術的發展,集跨越能力與美學特性于一體的斜拉橋越來越多的運用于實際工程中。斜拉索做為斜拉橋的主要構件,在風雨激振、橋面荷載振動等激勵下,會產生較大的振蕩,影響橋梁的行車安全,造成拉索結構疲勞損傷,進而影響橋梁使用壽命。在確保控制效果和保留斜拉橋美觀性的前提下,一般采用機械阻尼減振措施,通過在橋索上安置阻尼器的方式進行振動控制。將慣性質量運用在減振裝置中的思想最早來源于1909年,Dan Hartog[1]最早提出利用慣性質量的動力吸振概念,經過多年來的研究與改進[2-6]質量型阻尼器如調諧質量阻尼器(tuned mass damper,TMD)、慣性質量阻尼器(inertial mass damper,IMD)得到了廣泛的應用。黏滯型阻尼器如磁流變(magneto rheological,MR)阻尼器因其具有自重輕,減振性能優越等特點,近年來越來越多的應用于實際工程中。為了解決MR阻尼器外部供能問題,陳政清等[7-9]提出利用發電機、滾珠絲杠等組成的MR阻尼器自供電的復合減振系統。基于質量型阻尼器的吸振耗能特點,利用慣性質量進行能量收集的方法[10-14]也得了大量的研究。電磁慣性質量阻尼器(electromagnetic inertial mass damper,EIMD)是一種減振性能優越的半主動無源式阻尼器,通過滾珠絲杠的位移增效機制,將慣性質量單元與電磁阻尼器并聯組成一種新型的高效阻尼器,電磁阻尼由內置直流發電機提供,能在保證減振效果的前提下將吸振器得到的一部分振動能轉化為電能,在橋索振動控制方面有很好的應用。
Nakamura等[15]提出了EIMD的力學模型,通過公式理論推導得出了EIMD的阻尼力調節原理,并用實驗驗證了模型的正確性。Zhu等[16]在Nakamuray的基礎上深入研究,提出為了與實驗數據擬合更好,使計算結果更加精確,需要考慮EIMD力學模型中的寄生阻尼項,即阻尼器運行過程中的各種摩擦損耗;同時,他驗證了EIMD內置直流發電機進行能源收集與利用的可靠性,提出能量收集模型。汪志昊等[17]進行了斜拉索EIMD減振試驗,在驗證EIMD安置在斜拉索上的減振效果同時,測試了EIMD慣性質量和阻尼參數對平面內振動的影響,證明EIMD具有良好的減振效果,并且通過試驗得出阻尼器的慣性質量負剛度不會在實際工程中造成斜拉索減振系統不穩定。將EIMD固定在橋面上,與拉索形成耦合結構,通過慣性質量和電磁阻尼降低斜拉索的振動位移。
當前國內對于斜拉索-EIMD耦合振動系統的理論研究較少,本文基于D’Alembert原理建立斜拉索-EIMD非線性自由振動動力方程,進行數值模擬,驗證阻尼器對拉索平面內外振動的減振性能。建立斜拉索-EIMD線性自由振動方程,分析拉索垂度對阻尼器減振效果的影響。
1 阻尼器模型
1.1 阻尼器力學模型
電磁慣性質量阻尼器(EIMD)是一種由直流發電機、慣性飛輪、滾珠絲杠、齒輪箱、傳力桿組成的一種無源阻尼器,如圖1所示。EIMD通過旋轉飛輪產生較大的慣性質量,并通過內置直流發電機產生可變阻尼。較大的慣性質量可以減少作用在結構表面的振動激勵,延長結構自然周期,可變阻尼增加了結構的阻尼系數,也起到了補償普通質量調諧阻尼器(IMD)由于慣性質量大而導致的阻尼系數降低;同時直流發電機可將部分結構振動能轉化為可供收集利用的電能。
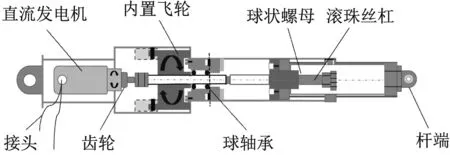
(a) 縮小比例的EIMD
將球狀螺母、飛輪和直流發電機用滾珠螺桿和直線運動導軌連接起來,從而實現將線性運動轉換為旋轉運動的過程;連接齒輪箱可以顯著增加飛輪和直流發電機的轉速,進一步提高了慣性和電磁阻尼。
EIMD非線性力學模型可表示為
(1a)
(1b)
(1c)
式中:Fd為EIMD阻尼力;me為阻尼器的等效慣性質量;y為桿端位移;cem為電磁阻尼系數;cm為寄生阻尼黏滯系數;fc為庫倫摩擦力;sgn表示符號函數;λ為滾珠絲杠換能效率;ng為齒輪箱轉動比率;l為滾珠絲杠尺寸參數;If為飛輪慣性矩;Im為直流發電機慣性矩;Kem為直流發電機機器常數;Rcoil為直流發電機的線圈電阻;Rload表示ELMD的負載電阻。
式(1a)表明EIMD總阻尼力由慣性質量、電磁效應產生的阻尼力和寄生阻尼力組成,寄生阻尼力對應阻尼器的各種機械損耗,包括:滾珠絲杠和滾珠軸承及直流發電機和齒輪箱的摩擦損耗、直流發電機的風阻損耗和磁損耗等。EIMD的非線性模型如圖2所示。

圖2 EIMD的非線性模型
式(1b)表式EIMD可以通過放大If、Im來產生較大的慣性質量。同時,式(1c)表明EIMD可以通過改變負載電阻Rload來調節阻尼力,當Rload為0時系統相當于短路狀態,電磁阻尼達到最大值,當Rload無限大時系統相當于開路狀態,電磁阻尼接近于0。
1.2 ELMD電能收集模型
1.2.1 能量流動過程
EIMD吸收的能量由飛輪動能和阻尼能量組成。總阻尼能是由寄生阻尼能與電磁阻尼能疊加組成,其中前者轉化為熱能耗散,后者由直流發電機轉換為電能。一部分電能被直流電機線圈耗散,另一部分電能傳到外部收集利用;然而,外部收集電能的電路(EHC)本身也將消耗部分電能,如圖3所示。
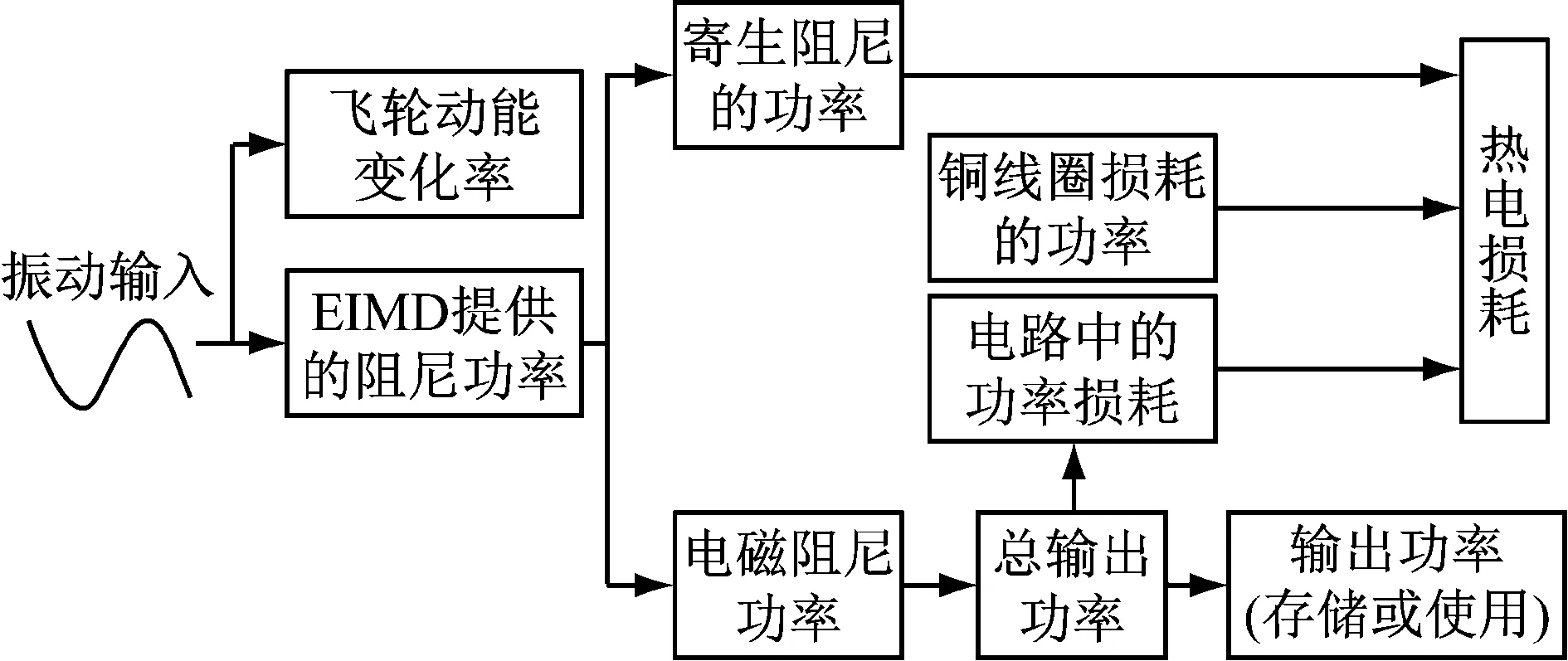
圖3 EIMD的能量流動
根據能量平衡原理,假設輸入振動為平穩振動,飛輪動能變化率(ROC)為0,功率流由式(2)表示
pin=pp+pem=pp+pcoil+pg=
pp+pcoil+pehc+pout
(2)
1.2.2 功率預測
當輸入的振動激勵是一個振幅不變的諧波激勵時,Zhu等認為輸出功率pout與振動頻率相關,輸出功率隨振動頻率的增加而增加。當采用阻抗匹配策略(即Rload=Rcoil)時,輸出功率達到最大值。
在實際工程結構中,當受到的激勵振幅不斷變化時,EIMD內部的振幅可能隨不同的阻尼水平而變化,因此,使用阻抗匹配策略來最大化輸出功率的方法不可靠,可通過將能量收集效率最大化來獲得最大的輸出功率。
能量收集效率η由式(4)表示
(3)
式中,cp為寄生阻尼系數。式(4)適用于適用于包括隨機振動的一般振動情況。能量收集效率本質上是一個與頻率和振幅相關的函數,當dη/dRload=0時,即Rload與最佳負載電阻相同時,能量采集效率η取得最大值ηmax。最佳負載電阻由式(5)表示
(4)
式(4)說明,可以通過增加負載電阻來增大能量采集效率η,但當負載電阻增大到最佳負載值時,繼續增大會導致能量采集效率降低;增大齒輪轉動比率ng,減小線圈電阻和寄生阻尼均可提高能量收集效率。
分析EIMD能量流動原理,發現其電能收集效率較高,Zhu等通過數值模擬驗證出:當EIMD輸入振幅為5 mm,頻率為1 Hz正弦激勵時,發電機輸出功率為9.2 W,最大能量采集效率達到29.1%。在實際工程中,每布置一個EIMD,就相當于添加了一個小型電池。橋梁不斷的受風荷載影響,直流發電機持續工作,能夠做為橋梁上其他用電設備的供電源。并且拉索振動頻率越大,發電機輸出功率越大,若搭配其他種類電磁黏滯型阻尼器,與EIMD間隔布置,在臺風等極端天氣條件下,能夠發揮高效的振動控制能力。
2 拉索的非線性運動方程
2.1 建立非線性運動模型
基于D’Alembert原理,將帶有阻尼器的斜拉索自由振動方程建立在一個以弦長方向為x軸,以斜拉索的重力方向為y軸的局部坐標系上,如圖4所示。假設斜拉索質量沿長度分布均勻,且具有相同的橫截面。由于斜拉索柔性較大,在工程誤差允許范圍內忽略抗彎剛度對拉索垂度的影響(對于短索和大直徑索,以及需要計算高階模態時,抗彎剛度不可忽略),忽略拉索自身縱向慣性力和阻尼力,以及外部動態荷載,帶有阻尼器的斜拉索非線性運動方程可以表示為
(5)
(6)
(7)
式中:H和h分別表示沿x軸方向上的靜態和動態張力分量;w和v分別表示相對于拉索靜態平衡位置沿平面內和平面外運動的位移分量;u為軸向位移分量。Fdy和Fdz表示阻尼器固定位置的x軸坐標為xcj時,阻尼器沿y軸和z軸產生的阻尼力分量,l為拉索長度,δ表示狄拉克的三角形函數。m為每單位長度的拉索質量,c1和c2是斜拉索平面內和平面外內部阻尼系數,θ為拉索相對于水平平面的角度,如圖3所示。z0為用拋物線近似微斜索靜態平衡曲線,由式(8)表示。E為楊氏模量,A為拉索橫截面面積,Le表示拉索有效長度。
(8)

圖4 帶有電磁調諧質量阻尼器的傾斜下垂拉索示意圖
邊界條件表示為[18]
u(0,t)=u1(t),u(l,t)=u2(t)
(9a)
w(0,t)=w1(t),w(l,t)=w2(t)
(9b)
v(0,t)=v1(t),v(l,t)=v2(t)
(9c)
將位移分量w、v、u用靜態位移與動態位移之和表示為[18]
u(x,t)=us(x,t)
w(x,t)=ws(x,t)+wd(x,t)
v(x,t)=vs(x,t)+vd(x,t)
(10)
式中:us(x,t)、ws(x,t)、vs(x,t)表示滿足邊界條件的靜態位移;wd(x,t)、vd(x,t)表示滿足均勻邊界條件的剩余動態位移。
擬靜態位移表達式寫為[19]
(11a)
(11b)
(11c)
將式(10)、(11)代入式(5)、(6)、(7),忽略靜態時拉索自身阻尼引起的阻尼力,式(5)、(6)、(7)寫為
(12)
(13)
(14)
拉索有效長度Le近似表示為
(15)
f表示拉索跨中垂度,表達式為
(16)
2.2 簡化模型
為了方便求得非線性微分方程組的數值解,將拉索平面內外動態位移分量用有限級數近似表示為
(17)
式中:pj(t)、qj(t)為廣義位移;φj(x)為形狀函數。Johnson等[20]提出了一種基于阻尼器位置的靜態單元力引起偏轉的形狀函數
(18)
式中:φ1是由靜力引起的阻尼器位置的標準化偏轉;φ2是張緊拉索的平面外第一模態形狀函數。將式(17)、(18)代入式(12)、(13)、(14),使用標準伽遼金(Galerkin)方法,在式左右兩邊同乘以φi(x)并沿索長積分,忽略索內外平面運動相互影響,即式中二次和三次項,最終化簡為
(19)
式中,(·)表示對時間t的偏導數,其他參數分別為
(20)
{P}=[p1p2q1q2]T,g0gggggg=[l/2 2l/π 0 0]T
(21)
2.3 阻尼力
式(1)表示了電磁調諧質量阻尼器的力學模型,相較與由慣性質量、電磁阻尼所產生的阻尼力,寄生阻尼項中的庫倫摩擦力產生的阻尼力很小,為簡化模型,本文接下來的計算中省略庫倫摩擦力fc。式(1)簡化為
(22)
y為EIMD桿端位移,對斜拉索進行幾何分析,如圖4所示,得到以下幾何關系式
平面內:y=1/cosγwd
(23a)
平面外:y=1/sinγvd
(23b)
將式(17)、(18)、(23)代入式(22),計算得到基于阻尼器位置的阻尼力表達式為

(24a)

(24b)
在式左右兩側同乘以φi(x)并沿索長積分,化簡計算得到
(25)
(26)
將式(25)、(26)代入式(19),即可求得{P}。求解后,拉索跨中的平面內和平面外位移分別表示為
(27)
3 數值模擬
以某丹麥橋梁為例,進行數值模擬計算,驗證運動方程的正確性。
斜拉索剛度為EA=2.17×109N,靜態張力H=5.5×106N,索長260 m,每米索重81.05 kg/m,傾角θ=30.4°;平面內外索內部阻尼系數c1、c2由式(28)表示,其中平面內外模態阻尼比ξ均為1.0%,平面內外低模態圓頻率ω1取3.201,ω2取3.148。
c1=2ξω1m,c2=2ξω2m
(28)
阻尼器安裝位置為(l-xcj)=l/30,阻尼器工作傾角γ=45°,α=59.6°(根據Xu等[21]選擇角度α=59.6°時,阻尼器的阻尼力垂直于傾斜拉索的弦線,可視為阻尼力的最佳方向)。
EIMD各項參數數據如表1所示。將各項參數代入式(19),搭建Simulink動力仿真模型,計算初速度為0,平面內初位移為0,平面外初位移由于受到拉索垂度影響,以式(29)計算,取值為0.052 99。
vi∕t=0=vd,i∕t=0=dmssin(πx/l)
(29)
式中,dms表示拉索跨中處靜位移,通常取值為1。

表1 EIMD各項參數表
求得方程的數值解,可得斜拉索平面內外位移如圖5所示。圖中振動曲線是由計算過程中迭代到每個時間節點時,拉索跨中位移所組成。整個振動過程中,平面內外位移均呈逐漸增大的趨勢,本文為方便說明,取振動過程中時間間隔為70~100 s為例。
在圖示時間段內,原索振動時,70~100 s內拉索平面內振動位移最大值為447.28 cm,平面外振動位移最大值為1 801.90 cm,安裝ELMD后,平面內振動最大位移為119.31 cm,降低了73.3%;平面外振動最大位移為494.86 cm,降低了72.5%;同時,安裝阻尼器后,隨著時間的增長,平面內外振動位移增幅明顯減緩。表明:電磁慣性質量阻尼器對拉索平面內外振動都有很好的抑制效果,拉索減振效果明顯。
4 斜拉索垂度對EIMD振動控制效果的影響
根據拉索振動理論,斜拉索的垂度對阻尼器振動控制效果影響顯著,為了獲得拉索垂度影響效果的直觀表現,基于D’Alembert原理,建立斜拉索-EIMD的線性運動方程。
4.1 建立線性自由振動方程
由式(6)可知,平面外非線性運動方程中不包含帶有斜拉索垂度項z0,在接下來的分析中,只針對平面內振動的情況計算。忽略抗彎剛度,拉索自身阻尼和二階小量h?2w/?x2的影響,由式(5)可得拉索平面內線性運動方程
(30)
忽略非線性項,即只考慮一階的影響,由式(14)得:
(31)
引入反映拉索彈性H/EA及幾何特性mgcosθl/H的Irvine參數λ2,即式(32),由線性振動理論可知,拉索張力H越小,λ2越大,表明拉索垂度越大。
(32)
為得到運動方程的解析解,將拉索平面內位移分量w(x,t)近似表示為[22]
(33)
將式(31)、(15)、(16)代入式(30)后,以式(32)、(33)化簡得到斜拉索-EIMD線性平面內運動方程為
(34)
式中,ω表示拉索振動圓頻率。
4.2 阻尼器線性力學方程
在線性條件下,忽略庫倫摩檫力,將式(1a)中的寄生阻尼項用線性的方法重新表示,電磁慣性質量阻尼器的力學模型可以簡化為
(35)
線性寄生阻尼系數用cp表示
cp=cm+4fc/πωd
(36)
總阻尼系數用cd表示
(37)
將式(33)、(23a)代入式(35),化簡得到:
(38)
4.3 方程的解
將式(38)代入式(34),斜拉索-EIMD運動方程可化簡為
(39)
式中:β表示波數;η為阻尼器阻尼系數;表達式分別為
(40a)
(40b)

(41)
式(41)包含了兩種三角函數,分別對應近似反對稱振動模式和近似對稱模式振動兩種情況,如圖6所示。

(a) 近似反對稱振動模式
4.4 近似對稱振動
4.4.1 波數方程
去掉波數方程(41)中,與近似反對稱振動模態相關的解,即方程左右兩側同除以sin(βl/2),整理得到近似對稱模式的近似波數方程如式(42)所示。
(42)
(43a)
(43b)
4.4.2 近似對稱模式的雙參數漸進

(44)
將式(44)代入式(42),并以無阻尼波數計算式(42)右側時,可得復波數增量表達式為
(45a)
(45b)
特征頻率ωn與阻尼比的關系如下
(46)
下角標n表示模態數。第n個模態阻尼比ζn可以表示為
(47)
根據雙參數漸進公式整理得到對應的模態阻尼比表達式如下
(48)
當斜拉索沒有設置阻尼器時,近似對稱模式的波數方程(41)左側第二個因子確定。整理后,可得
(49)
式(49)為關于振動頻率的超越方程,解為正切函數與三次函數的圖像交點,根據線性振動理論,式(49)解得的頻率值在λ2=(n+1)2π2時,出現模態跳躍的分界點,拉索振動固有頻率在分界點兩側呈現不同的變化規律,Krenk等中將這種現象稱作頻率交叉,即對應圖6(b)的振動情況。Krenk等計算得到出現頻率交叉現象時,波數的對應取值為:βnl=βn+1l=(n+1)π。圖6(b)上側表示λ2小于頻率交叉點值,這種情況下,拉索振動位移w(x)符號保持不變;當λ2大于頻率交叉點值時,拉索振動位移w(x)在對稱的兩個點出現了符號改變,如圖6(b)下側所示。在交叉點前后,振型曲線在對稱模式與反對稱模式間振蕩,因此,可將λ2在頻率交叉點的值看作臨界值。
圖7 n=1且時阻尼比ζn
4.5 近似反對稱振動
4.5.1 波數方程
去除式(41)中與近似對稱模式相關的根,即方程左右兩邊同除以cos(1/2βl)項,整理得到近似反對稱模式的波數方程
(50a)
(50b)
Irvine等[24]提出可以在正切函數的分支上找到式(50)的近似解即式(51)。
n=2,4,…
(51)
(52)
4.5.2 近似反對稱模式的雙參數漸進
(53)
n=2,4,…
(54)
將式(54)代入式(47)可得
(55)

圖8 n=1且時阻尼比ζn
將Φ中的阻尼器參數歸一化處理后,代入式(48)及式(55),進行EIMD的慣性質量和阻尼系數分析。由于EIMD的力學模型經線性化處理后與慣性質量阻尼器(IMD)相似,從而EIMD參數分析可參照Wang等對IMD參數的分析過程。
5 結 論
(1) 本文通過求解EIMD與斜拉索共同作用的非線性自由振動方程,得出斜拉索振動位移-時間曲線,驗證了電磁慣性質量阻尼器對抑制斜拉索平面內外振動位移的有效性。計算得到在70~100 s時間段內,安裝EIMD后平面內振動位移由447.28 cm降至119.31 cm,降低73.3%,平面外振動位移由1 801.90 cm降至494.86 cm,降低72.5%,從理論上證明了EIMD的減振性能優越。
(2) 通過建立求解斜拉索-EIMD的平面內振動線性自由振動方程,得出:① 近似對稱模式下,拉索垂度對阻尼器的控制效果影響明顯。在低階模態下,當λ2小于臨界值4π2=39.478時,阻尼器的控制效果隨著垂度逐漸增大而降低,當λ2大于臨界值時阻尼器的控制效果隨垂度增大而增大;② 近似反對稱模式下,拉索垂度對阻尼器的控制效果沒有影響。
EIMD具有良好的減振性能和可自發電的特性,在應對極端大風天氣或自然災害時,能夠在正常工作的同時輸出電能;在橋梁抗風設計時,可與電磁黏滯型阻尼器間隔布置,兩類阻尼器共同工作,既能最大限度的控制橋梁振動,也能夠很好的解決電磁黏滯型阻尼器野外持續供電的難題,在橋梁上的應用前景廣泛。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
大電機技術(2022年5期)2022-11-17 08:12:48
天天愛科學(2020年6期)2020-09-10 07:22:44
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
數學物理學報(2018年4期)2018-09-14 03:40:58
數學物理學報(2017年6期)2018-01-22 02:26:40
船海工程(2015年4期)2016-01-05 15:53:26
噪聲與振動控制(2015年4期)2015-01-01 07:08:44
計算物理(2014年2期)2014-03-11 17:01:44
鄭州大學學報(理學版)(2014年3期)2014-03-01 04:21:00